
Охранник, учитель и бездельник: необычные функции домашних роботов
Мы привыкли к робопылесосам и «умным» колонкам, но современные домашние роботы научились еще и готовить, или, например, заботиться о домашних животных. Выбрали роботов, которые выполняют полезные и необычные задачи
Потолочный робот
Робот-помощник Toyota
В 2020 году Toyota Research Institute представил экстравагантного домашнего робота, который способен передвигаться по рельсам на потолке.
Потолочный робот Toyota (Фото: Toyota Research Institute)
Инженеры объяснили идею крепления на потолке тем, что иногда домашним роботам не хватает высоты, чтобы выполнять задачи. Кроме того, на потолке обычно нет препятствий в виде предметов или домашних животных. Такой робот отлично подойдет для небольших помещений, так как не занимает место на полу.
Такой робот отлично подойдет для небольших помещений, так как не занимает место на полу.
Робот-кухня
В декабре 2020 года на выставке информационных технологий в Дубае британская компания Moley Robotics продемонстрировала роботизированную кухню — Moley Kitchen. Робот самостоятельно достает продукты из холодильника, моет, готовит их и потом наводит за собой порядок.
Moley Kitchen готовит стейк
Робот-кухня представляет собой подвесную систему с двумя мобильными манипуляторами, движения которых аналогичны человеческим.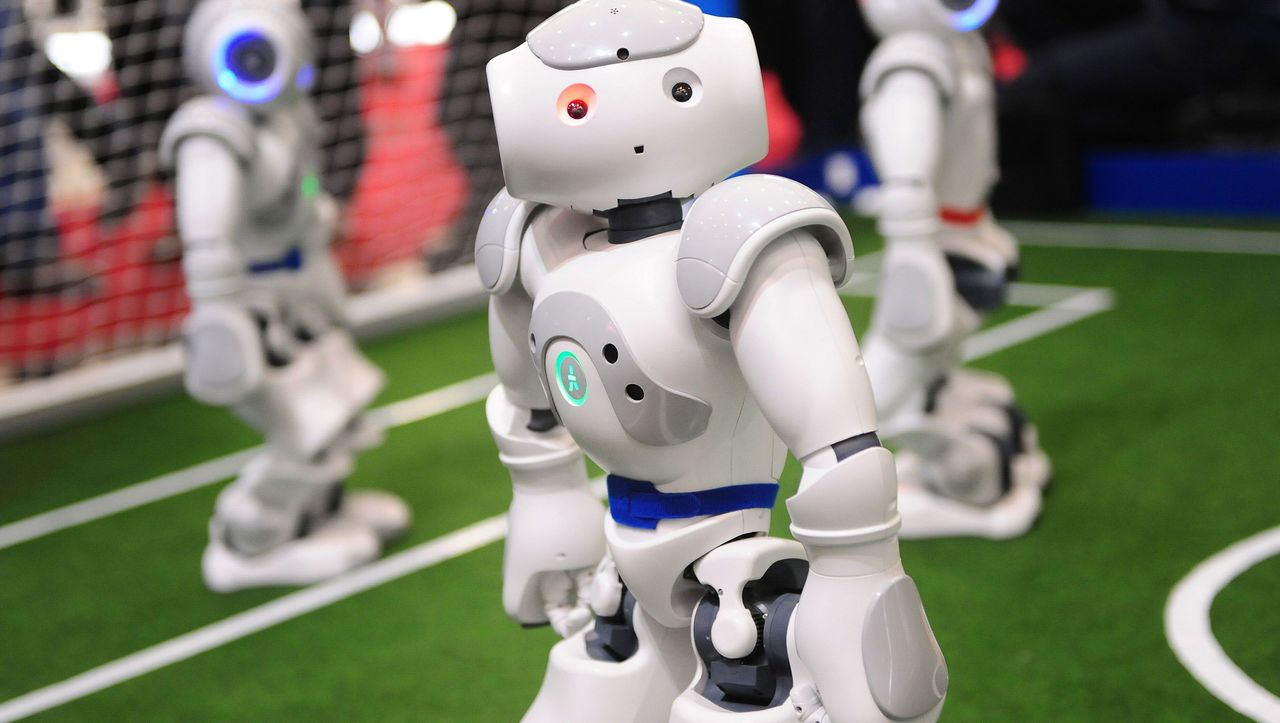 Систему обучали на опыте шеф-повара, победителя серии BBC MasterChef 2011 года Тима Андерсона. Техники приготовления блюд Андерсона запечатлели в 3D, а затем преобразовали с помощью алгоритмов в движения робота.
Систему обучали на опыте шеф-повара, победителя серии BBC MasterChef 2011 года Тима Андерсона. Техники приготовления блюд Андерсона запечатлели в 3D, а затем преобразовали с помощью алгоритмов в движения робота.
Робот может создавать 30 блюд. В будущем его меню расширят до 5 тыс. рецептов.
Цена такой робокухни немаленькая — примерно $333 тыс. Тем не менее, на презентации Moley Robotics объявила, что уже получила 1,2 тыс. запросов от потенциальных покупателей.
Робот-бездельник
Среди большого количества полезных роботов есть и такие, которые ничего не делают сами: более того, им самим нужна помощь человека. Это, например, NICOBO от Panasonic. В отличие от многофункциональных роботов, он не может даже двигаться без помощи владельца, зато может махать хвостом, моргать глазами и крутиться на месте, а также просить хозяина отнести его в теплое место, распознавая его или ее лицо. Еще он сделан из шерсти и очень приятен на ощупь.
 com
comРобот специально сконструирован таким беспомощным, чтобы помогать людям бороться с одиночеством: чувство ответственности за «настроение» робота пробуждает в человеке приятные эмоции и ощущение выполненного долга. Примерно по такому принципу действовали другие игрушки-компаньоны: тамагочи.
Робопылесос-охранник
Робот-пылесос LG CordZero R9 обладает обучаемой системой управления DeepThinQ, которая может распознавать предметы на пути, чтобы выбирать оптимальный маршрут движения. Дополнительно в LG CordZero R9 предусмотрены план уборок по расписанию и дневник. Но самая неожиданная для пылесоса функция — отслеживание движущихся предметов в режиме патрулирования. Робот начинает фотографировать происходящее и выкладывать полученные снимки в мобильное приложение с уведомлением владельцу.
Пылесос стоит ₽90 тыс.
Роботы-учителя для детей
Недавно компания Robosen Robotics представила образовательного робота К1. Устройство умеет танцевать, ходить, стрелять и выполнять другие трюки. Робот управляется голосовыми командами или через приложение, и дает возможность детям разного возраста научиться основам программирования.
Образовательный робот K1
Стартап Embodied предлагает своего робота-компаньона Мокси, который помогает детям развиваться и обучаться через игру, чтение или рисование. Он создан при участии педагогов и экспертов по развитию детей и также имеет повышенные характеристики безопасности. Правда, стоит такая развивающая игрушка $1,7 тыс.
Он создан при участии педагогов и экспертов по развитию детей и также имеет повышенные характеристики безопасности. Правда, стоит такая развивающая игрушка $1,7 тыс.
В России разработали «робота-черепаху» для разгона протестов (фото)
Российская академия наук предложила проект робота-черепахи для Росгвардии, который будет призван разгонять и подавлять протесты. Об этом сообщает РИА-Новости, ссылаясь на Роспатент.
Будь всегда в курсе событий вместе с телеграм-каналом Быстрый Фокус.
 Сообщается, что корпус позволит избежать увечий среди демонстрантов за счет свои скругленных форм.
Сообщается, что корпус позволит избежать увечий среди демонстрантов за счет свои скругленных форм.Разгонять толпу роботы смогут, соединяясь в рой. Робот будет оснащаться электрошокером, сеткометами и быстротвердеющей пеной. Черепахоподобная форма позволит также избежать того, что его перевернут протестующие. Им попросту не за что будет ухватиться.
Фото: Роспатент
По патенту высота разработки будет около 80 см или по пояс взрослому человеку. Предусматривается разработка двух модификаций — робота оперативника и робота-щитоноца. Первый будет ездить на скорости 50-60 км/ч. Его цель будет состоять в том, чтобы задерживать отдельных протестующих и “рассекать” скопления людей. Вторая модификация будет устанавливать разграничения для разделения активистов.
Описывается также и то, как робот будет работать — во время протестов, один или в группе робот будет подъезжать к протестующим, и через громкую связь призывать к остановке акции или же оставаться на месте до приезда полиции.
Росгвардия опровергает заказ патента
Представитель силовиков Валерий Грибакин заявил, что они не заказывали никаких работ, и ведомство не нуждается в подобного рода роботах.
“Росгвардия не имеет отношения к разработке данного образца. Указанные работы не заказывались, так как такого рода продукция не представляет интереса для ведомства”, — заявил Грибакин.
Напомним, в РФ провели огневые испытания группы боевых роботов “Маркер”, которые самостоятельно определили цели и вышли на огневой рубеж. Отметим, на учениях “Запад-2021” РФ применила ударные роботы на “Уран-9” и “Нерехта”.
Рубрика – выберите рубрику -HR специалисты – Бизнес-тренерыITАвтобизнес – Сервисное обслуживаниеАдминистративный персонал – Водители – КурьерыБанки – Инвестиции – ЛизингБухгалтерия – Налоги – Финансы предприятияГостиницы – Рестораны – КафеГосударственные учреждения – Местное самоуправлениеДизайн – Графика – ФотоЗакупки – СнабжениеКонсалтинг – Аналитика – АудитКультура – Шоу-бизнес – РазвлеченияЛогистика – Таможня – СкладМаркетинг – Реклама – PRМедиа – Издательское делоМедицина – Фармацевтика – ЗдравоохранениеМорские специальностиНаука – Образование – ПереводНедвижимостьНекоммерческие – Общественные организацииОхрана – Безопасность – Силовые структурыПродажи – Клиент-менеджментПроизводство – Инженеры – ТехнологиРабочие специальности – Персонал для домаСельское хозяйство – Агробизнес – Лесное хозяйствоСпорт – Красота – ОздоровлениеСтрахованиеСтроительство – АрхитектураСтуденты – Начало карьеры – Без опытаТелекоммуникации – СвязьТоп-менеджмент – ДиректораТорговляТуризм – ПутешествияЮристы, адвокаты, нотариусы | Регион – выберите регион -КиевДнепрДонецкЗапорожьеОдессаХарьковЛьвовДругие страныВинницаЖитомирИвано-ФранковскКривой РогКропивницкийЛуганскЛуцкМариупольНиколаевПолтаваРовноСевастопольСимферопольСумыТернопольУжгородХерсонХмельницкийЧеркассыЧерниговЧерновцыАвангардАвдеевкаАкимовкаАлександрияАлександровка, Донецкая обл. Великая Александровка, Херсонская обл.Великая БагачкаВеликая ДоброньВеликая ДымеркаВеликая ЛепетихаВеликая МихайловкаВеликая НовоселкаВеликая ПисаревкаВеликие КопаниВеликие ЛазыВеликие МостыВеликие СорочинцыВеликий БерезныйВеликий БичковВеликий БурлукВеликий ДальникВеликий КучуровВеликодолинскоеВеликое КолодноВеликосёлкиВербкиВересневоеВертиевкаВерхнеднепровскВерхний РогачикВерховинаВерховцевоВеселиновоВеселоеВижницаВизиркаВилковоВинникиВинницкие ХутораВиноградовВиньковцыВита-ПочтоваяВишневоеВладимир-ВолынскийВладимирецВладимировкаВознесенскВойниловВолновахаВоловецВолодаркаВолочискВолчанскВольногорскВольнянскВорзельВорожбаВороновицаВороньковВорохтаВрадиевкаВыровВысокийВысокопольеВышгородГавриловкаГадячГайворонГайсинГаличГатноеГеническГеническая ГоркаГерцаГлебовкаГлевахаГлобиноГлубокоеГлуховГлыбокаяГнединГниваньГовтвянчикГоголевГолая ПристаньГолованевскГолубовкаГораГореничиГоренкаГоришние ПлавниГорловкаГорностаевкаГорнякГороденкаГородище, Киевская обл.Городище, Черкасская обл.Городище, Черниговская обл. Великая Александровка, Херсонская обл.Великая БагачкаВеликая ДоброньВеликая ДымеркаВеликая ЛепетихаВеликая МихайловкаВеликая НовоселкаВеликая ПисаревкаВеликие КопаниВеликие ЛазыВеликие МостыВеликие СорочинцыВеликий БерезныйВеликий БичковВеликий БурлукВеликий ДальникВеликий КучуровВеликодолинскоеВеликое КолодноВеликосёлкиВербкиВересневоеВертиевкаВерхнеднепровскВерхний РогачикВерховинаВерховцевоВеселиновоВеселоеВижницаВизиркаВилковоВинникиВинницкие ХутораВиноградовВиньковцыВита-ПочтоваяВишневоеВладимир-ВолынскийВладимирецВладимировкаВознесенскВойниловВолновахаВоловецВолодаркаВолочискВолчанскВольногорскВольнянскВорзельВорожбаВороновицаВороньковВорохтаВрадиевкаВыровВысокийВысокопольеВышгородГавриловкаГадячГайворонГайсинГаличГатноеГеническГеническая ГоркаГерцаГлебовкаГлевахаГлобиноГлубокоеГлуховГлыбокаяГнединГниваньГовтвянчикГоголевГолая ПристаньГолованевскГолубовкаГораГореничиГоренкаГоришние ПлавниГорловкаГорностаевкаГорнякГороденкаГородище, Киевская обл.Городище, Черкасская обл.Городище, Черниговская обл. ГородняГородок, Львовская обл.Городок, Ровненская обл.Городок, Хмельницкая обл.ГороховГостинцовоГостомельГощаГрадижскГребенкаГребёнкиГригоровкаГубинихаГуляйполеГусятинДавыдовДвуречнаяДебальцевоДелятинДемидовкаДеражняДергачиДжанкойДзвонковоеДиканькаДнепрорудноеДобровеличковкаДоброводыДобромильДобропольеДоброславДобротворДовбышДокучаевскДолжанскДолинаДолинскаяДоманевкаДонецДрабовДрагобратДрогобычДружбаДружковкаДружняДубляныДубноДубовоеДубровицаДубровкаДударковДунаевцыДымерЕвпаторияЕланецЕмильчиноЕнакиевоЖашковЖдановкаЖежелевЖелезный ПортЖелтые ВодыЖидачовЖмеринкаЖолкваЖуравноЗаболотовЗаболотьеЗабучьеЗавадаЗаводскоеЗазимьеЗакарпатьеЗалещикиЗаложцыЗаможное, Житомирская обл.Заречное, Варашский р-нЗаряЗаря ТрудаЗаставнаЗатокаЗахарьевкаЗачепиловкаЗбаражЗборовЗвенигородкаЗгуровкаЗдолбуновЗеленодольскЗеньковЗмиевЗнаменкаЗнаменка ВтораяЗолотоношаЗолочев, Львовская обл.Золочев, Харьковская обл.ЗугрэсИваничиИванковИванковичиИвановка, Одесская обл.Ивановка, Херсонская обл.ИвановоИзмаилИзюмИзяславИличанкаИлларионовоИльинцыИнгулецИрклиевИрпеньИршаваИршанскИслам-Терек (Кировское)Ички (Советский)ИчняКагарлыкКадиевкаКазанкаКазатинКаланчакКалиновКалиновка, Броварской р-н, Киевская обл. ГородняГородок, Львовская обл.Городок, Ровненская обл.Городок, Хмельницкая обл.ГороховГостинцовоГостомельГощаГрадижскГребенкаГребёнкиГригоровкаГубинихаГуляйполеГусятинДавыдовДвуречнаяДебальцевоДелятинДемидовкаДеражняДергачиДжанкойДзвонковоеДиканькаДнепрорудноеДобровеличковкаДоброводыДобромильДобропольеДоброславДобротворДовбышДокучаевскДолжанскДолинаДолинскаяДоманевкаДонецДрабовДрагобратДрогобычДружбаДружковкаДружняДубляныДубноДубовоеДубровицаДубровкаДударковДунаевцыДымерЕвпаторияЕланецЕмильчиноЕнакиевоЖашковЖдановкаЖежелевЖелезный ПортЖелтые ВодыЖидачовЖмеринкаЖолкваЖуравноЗаболотовЗаболотьеЗабучьеЗавадаЗаводскоеЗазимьеЗакарпатьеЗалещикиЗаложцыЗаможное, Житомирская обл.Заречное, Варашский р-нЗаряЗаря ТрудаЗаставнаЗатокаЗахарьевкаЗачепиловкаЗбаражЗборовЗвенигородкаЗгуровкаЗдолбуновЗеленодольскЗеньковЗмиевЗнаменкаЗнаменка ВтораяЗолотоношаЗолочев, Львовская обл.Золочев, Харьковская обл.ЗугрэсИваничиИванковИванковичиИвановка, Одесская обл.Ивановка, Херсонская обл.ИвановоИзмаилИзюмИзяславИличанкаИлларионовоИльинцыИнгулецИрклиевИрпеньИршаваИршанскИслам-Терек (Кировское)Ички (Советский)ИчняКагарлыкКадиевкаКазанкаКазатинКаланчакКалиновКалиновка, Броварской р-н, Киевская обл. Калиновка, Васильковский р-н, Киевская обл.Калиновка, Винницкая обл.Калиновка, Киевская обл.КалитаКалушКаменец-ПодольскийКаменкаКаменка-БугскаяКаменка-ДнепровскаяКаменскоеКамень-КаширскийКаневКарловкаКатеринопольКатюжанкаКаховкаКегичевкаКельменцыКерчьКиверцыКилияКирилловкаКирнасовкаКицманьКлавдиево-ТарасовоКлеваньКлесовКняжичиКобелякиКоблевоКовельКовшаровкаКодымаКозелецКозельщинаКозинКозоваКолкиКоломакКоломыяКомарноКоминтерновскоеКомпанеевкаКонотопКонстантиновкаКопычинцыКорецКоропКоростеньКоростышевКорсунцыКорсунь-ШевченковскийКорюковкаКосмачКосовКостопольКотельваКоцюбинскоеКраковецКраматорскКрасиловКрасиловкаКрасноградКрасноеКраснокутскКраснопавловкаКраснопольеКрасносёлкаКременецКременная, Луганская обл.Кременная, Хмельницкая обл.КременчугКремидовкаКривое ОзероКриничкиКролевецКрыжановкаКрыжопольКрымКрюковщинаКубличКуликовкаКупянскКураховоКурман (Красногвардейское)КутыКучурганЛадыжинЛазурноеЛановцыЛатовкаЛебедёвкаЛебединЛелюховкаЛениноЛескиЛесникиЛетичевЛиман, Донецкая обл.Лиман, Харьковская обл. Калиновка, Васильковский р-н, Киевская обл.Калиновка, Винницкая обл.Калиновка, Киевская обл.КалитаКалушКаменец-ПодольскийКаменкаКаменка-БугскаяКаменка-ДнепровскаяКаменскоеКамень-КаширскийКаневКарловкаКатеринопольКатюжанкаКаховкаКегичевкаКельменцыКерчьКиверцыКилияКирилловкаКирнасовкаКицманьКлавдиево-ТарасовоКлеваньКлесовКняжичиКобелякиКоблевоКовельКовшаровкаКодымаКозелецКозельщинаКозинКозоваКолкиКоломакКоломыяКомарноКоминтерновскоеКомпанеевкаКонотопКонстантиновкаКопычинцыКорецКоропКоростеньКоростышевКорсунцыКорсунь-ШевченковскийКорюковкаКосмачКосовКостопольКотельваКоцюбинскоеКраковецКраматорскКрасиловКрасиловкаКрасноградКрасноеКраснокутскКраснопавловкаКраснопольеКрасносёлкаКременецКременная, Луганская обл.Кременная, Хмельницкая обл.КременчугКремидовкаКривое ОзероКриничкиКролевецКрыжановкаКрыжопольКрымКрюковщинаКубличКуликовкаКупянскКураховоКурман (Красногвардейское)КутыКучурганЛадыжинЛазурноеЛановцыЛатовкаЛебедёвкаЛебединЛелюховкаЛениноЛескиЛесникиЛетичевЛиман, Донецкая обл.Лиман, Харьковская обл. ЛиманкаЛиповая ДолинаЛиповецЛипцыЛисичанскЛитинЛозоваяЛокачиЛомачинцыЛохвицаЛубныЛугиныЛужаныЛуковЛутугиноЛысянкаЛюбарЛюбашевкаЛюбешовЛюбомльЛюботинЛюдвищеЛютежМагалаМагдалиновкаМакаровМакеевкаМалая ВискаМалая ДаниловкаМалинМалодолинскоеМалополовецкоеМалые СорочинцыМалый ЛюбеньМамаивцыМангушМаневичиМаньковкаМарганецМарковкаМартусовкаМарьинкаМашевкаМаякиМеджибожМежгорьеМежеваяМелитопольМеловоеМенаМерефаМещанкаМигияМикуличиМикуличинМилаМиргородМирноградМирноеМироновкаМиротинМихайловкаМлиновМлыновоМогилев-ПодольскийМонастырискаМонастырищеМоршинМоспиноМостискаМрияМукачевоМурованоеМурованые КуриловцыМусиевкаМякотыНадворнаяНародичиНедригайловНежинНемешаевоНемировНересницаНетешинНижнегорскийНижние СерогозыНизшая ДубечняНиколаев, Львовская обл.НиколаевкаНиколаевка, Донецкая обл.НикольскоеНикопольНовая АлександровкаНовая БороваяНовая ВодолагаНовая ДофиновкаНовая КаховкаНовая МаячкаНовая ОдессаНовая УшицаНовгородкаНовгород-СеверскийНовоазовскНовоайдарНовоалександровкаНовоалексеевкаНовоархангельскНововолынскНововоронцовкаНовоград-ВолынскийНовогродовкаНоводнестровскНовокалиновоНовомиргородНовомосковскНовониколаевкаНовопсковНовоселицаНовоселки, Киевская обл. ЛиманкаЛиповая ДолинаЛиповецЛипцыЛисичанскЛитинЛозоваяЛокачиЛомачинцыЛохвицаЛубныЛугиныЛужаныЛуковЛутугиноЛысянкаЛюбарЛюбашевкаЛюбешовЛюбомльЛюботинЛюдвищеЛютежМагалаМагдалиновкаМакаровМакеевкаМалая ВискаМалая ДаниловкаМалинМалодолинскоеМалополовецкоеМалые СорочинцыМалый ЛюбеньМамаивцыМангушМаневичиМаньковкаМарганецМарковкаМартусовкаМарьинкаМашевкаМаякиМеджибожМежгорьеМежеваяМелитопольМеловоеМенаМерефаМещанкаМигияМикуличиМикуличинМилаМиргородМирноградМирноеМироновкаМиротинМихайловкаМлиновМлыновоМогилев-ПодольскийМонастырискаМонастырищеМоршинМоспиноМостискаМрияМукачевоМурованоеМурованые КуриловцыМусиевкаМякотыНадворнаяНародичиНедригайловНежинНемешаевоНемировНересницаНетешинНижнегорскийНижние СерогозыНизшая ДубечняНиколаев, Львовская обл.НиколаевкаНиколаевка, Донецкая обл.НикольскоеНикопольНовая АлександровкаНовая БороваяНовая ВодолагаНовая ДофиновкаНовая КаховкаНовая МаячкаНовая ОдессаНовая УшицаНовгородкаНовгород-СеверскийНовоазовскНовоайдарНовоалександровкаНовоалексеевкаНовоархангельскНововолынскНововоронцовкаНовоград-ВолынскийНовогродовкаНоводнестровскНовокалиновоНовомиргородНовомосковскНовониколаевкаНовопсковНовоселицаНовоселки, Киевская обл. Новоселки, Львовская обл.Новотроицкое, Донецкая обл.Новотроицкое, Херсонская обл.НовоукраинкаНовояворовскНовые БезрадичиНовые БелокоровичиНовые ПетровцыНовые СанжарыНовый БугНовый РоздолНосовкаОбуховОбуховкаОвидиопольОвручОжидовОкныОлевскОлескоОлешкиОлыкаОльшанкаОльшаныОнуфриевкаОпошняОратовОреховОржицаОрловщинаОстерОстрогОсыковоОтынияОчаковОчеретиноПавлоградПавлышПанкаПервомайск, Луганская обл.Первомайск, Николаевская обл.ПервомайскийПервомайскоеПеревальскПерегинскоеПеремышляныПеречинПерещепиноПереяславПереяславскоеПереяслав-ХмельницкийПершотравенскПершотравневоеПесковкаПесочинПесчанкаПетриковкаПетровоПетропавловкаПетропавловская БорщаговкаПеченегиПирновоПирятинПлотычаПобугскоеПогребищеПогребыПодволочискПодворкиПодворноеПодгайцыПодгородноеПодольскПокровПокровкаПокровскПокровскоеПолесскоеПоловоеПологиПолонноеПолянаПоляницаПомошнаяПопаснаяПопельняПочаевПриазовскоеПрилукиПриморскПриморскоеПулиныПустомытыПутивльПутилаПуща-ВодицаПятихаткиРава-РусскаяРадеховРадивиловРадомышльРаздельнаяРаздольноеРакитноеРалевкаРатноРаховРениРепкиРешетиловкаРжищевРовенькиРовноеРогатинРодинскоеРожищеРожнятовРоздолРозовкаРокитноеРоманов, Волынская обл. Новоселки, Львовская обл.Новотроицкое, Донецкая обл.Новотроицкое, Херсонская обл.НовоукраинкаНовояворовскНовые БезрадичиНовые БелокоровичиНовые ПетровцыНовые СанжарыНовый БугНовый РоздолНосовкаОбуховОбуховкаОвидиопольОвручОжидовОкныОлевскОлескоОлешкиОлыкаОльшанкаОльшаныОнуфриевкаОпошняОратовОреховОржицаОрловщинаОстерОстрогОсыковоОтынияОчаковОчеретиноПавлоградПавлышПанкаПервомайск, Луганская обл.Первомайск, Николаевская обл.ПервомайскийПервомайскоеПеревальскПерегинскоеПеремышляныПеречинПерещепиноПереяславПереяславскоеПереяслав-ХмельницкийПершотравенскПершотравневоеПесковкаПесочинПесчанкаПетриковкаПетровоПетропавловкаПетропавловская БорщаговкаПеченегиПирновоПирятинПлотычаПобугскоеПогребищеПогребыПодволочискПодворкиПодворноеПодгайцыПодгородноеПодольскПокровПокровкаПокровскПокровскоеПолесскоеПоловоеПологиПолонноеПолянаПоляницаПомошнаяПопаснаяПопельняПочаевПриазовскоеПрилукиПриморскПриморскоеПулиныПустомытыПутивльПутилаПуща-ВодицаПятихаткиРава-РусскаяРадеховРадивиловРадомышльРаздельнаяРаздольноеРакитноеРалевкаРатноРаховРениРепкиРешетиловкаРжищевРовенькиРовноеРогатинРодинскоеРожищеРожнятовРоздолРозовкаРокитноеРоманов, Волынская обл. Романов, Житомирская обл.РомныРославичиРосохачРубежноеРудкиРудноРужинРясное-РусскоеСавинцыСавраньСакиСамборСаратаСарныСартанаСатановСахновщинаСваляваСватовоСветловодскСветлодарскСветлоеСвятогорскСвятопетровскоеСеверодонецкСеверскСелидовоСеменовка, Полтавская обл.Семеновка, Черниговская обл.СергеевкаСередина-БудаСинельниковоСинякСкадовскСкала-ПодольскаяСкалатСквираСколеСкороходовоСлавскоеСлавутаСлавутичСлавяносербскСлавянскСлобожанское, Днепропетровская обл.Слобожанское, Харьковская обл.СмелаСмолиноСмыгаСнежноеСнигиревкаСновскСнятынСокальСокиряныСокольникиСолдатскоеСоледарСоленоеСолоницевкаСолотвинСолотвиноСорокиноСосницаСосновкаСофиевкаСофиевская БорщаговкаСошниковСребноеСтавищеСтаница ЛуганскаяСтарая ВыжевкаСтарая СиняваСтаробельскСтаробешевоСтароеСтароконстантиновСтарые ПетровцыСтарый МартыновСтарый СамборСтебникСтепановкаСтепногорскСторожинецСтоянкаСтрелковичиСтрыйСтуденикиСудакСудовая ВишняСупруновкаСходницаСчастливоеСчастливцевоСчастьеТаврийскТалалаевкаТальноеТарасовкаТаращаТарутиноТатарбунарыТатаровТеофипольТепликТеплодарТеребовляТересваТерновкаТетиевТимошовкаТлумачТокаревкаТокмакТолстоеТомаковкаТомашпольТорецкТорчинТребуховТроицкое (Довгалевское), Киевская обл. Романов, Житомирская обл.РомныРославичиРосохачРубежноеРудкиРудноРужинРясное-РусскоеСавинцыСавраньСакиСамборСаратаСарныСартанаСатановСахновщинаСваляваСватовоСветловодскСветлодарскСветлоеСвятогорскСвятопетровскоеСеверодонецкСеверскСелидовоСеменовка, Полтавская обл.Семеновка, Черниговская обл.СергеевкаСередина-БудаСинельниковоСинякСкадовскСкала-ПодольскаяСкалатСквираСколеСкороходовоСлавскоеСлавутаСлавутичСлавяносербскСлавянскСлобожанское, Днепропетровская обл.Слобожанское, Харьковская обл.СмелаСмолиноСмыгаСнежноеСнигиревкаСновскСнятынСокальСокиряныСокольникиСолдатскоеСоледарСоленоеСолоницевкаСолотвинСолотвиноСорокиноСосницаСосновкаСофиевкаСофиевская БорщаговкаСошниковСребноеСтавищеСтаница ЛуганскаяСтарая ВыжевкаСтарая СиняваСтаробельскСтаробешевоСтароеСтароконстантиновСтарые ПетровцыСтарый МартыновСтарый СамборСтебникСтепановкаСтепногорскСторожинецСтоянкаСтрелковичиСтрыйСтуденикиСудакСудовая ВишняСупруновкаСходницаСчастливоеСчастливцевоСчастьеТаврийскТалалаевкаТальноеТарасовкаТаращаТарутиноТатарбунарыТатаровТеофипольТепликТеплодарТеребовляТересваТерновкаТетиевТимошовкаТлумачТокаревкаТокмакТолстоеТомаковкаТомашпольТорецкТорчинТребуховТроицкое (Довгалевское), Киевская обл. Троицкое, Луганская обл.Тростянец, Винницкая обл.Тростянец, Сумская обл.ТрускавецТульчинТурбовТурийскТуркаТывровТыннаяТысменицаТютюнникиТячевУгледарУгневУзинУкраинкаУкраинкаУкраинскУманьУсатовоУстиновкаФастовФеневичиФеодосияФонтанкаХарцызскХащеватоеХмельникХодовичиХодоровХодосовкаХоролХоростковХорошевХотинХотовХотяновкаХрестовкаХристиновкаХрустальныйХустХыровЦаричанкаЦуманьЧабаныЧайкиЧаплинкаЧемеровцыЧепелевкаЧепилиевкаЧервоноградЧервоногригоровкаЧернаяЧерневцы, Винницкая обл.ЧерниговкаЧернобаевкаЧернобайЧерноморскЧерноморскоеЧернухиЧерняховЧечельникЧигиринЧижовкаЧистяковоЧкаловскоеЧопЧортковЧубинскоеЧугуевЧудновЧукваЧумакиЧутовоШаргородШахтерскШацкШевченковоШепетовкаШирокоеШиряевоШишакиШосткаШполаШумскЩелкиноЭнергодарЮжноукраинскЮжныйЮринцыЮрковцыЮрьевкаЯворовЯготинЯлта, Донецкая обл.Ялта, КрымЯмполь, Винницкая обл.Ямполь, Сумская обл.Яны Капу (Красноперекопск)ЯремчеЯреськиЯрмолинцыЯсиноватаяЯсиня Троицкое, Луганская обл.Тростянец, Винницкая обл.Тростянец, Сумская обл.ТрускавецТульчинТурбовТурийскТуркаТывровТыннаяТысменицаТютюнникиТячевУгледарУгневУзинУкраинкаУкраинкаУкраинскУманьУсатовоУстиновкаФастовФеневичиФеодосияФонтанкаХарцызскХащеватоеХмельникХодовичиХодоровХодосовкаХоролХоростковХорошевХотинХотовХотяновкаХрестовкаХристиновкаХрустальныйХустХыровЦаричанкаЦуманьЧабаныЧайкиЧаплинкаЧемеровцыЧепелевкаЧепилиевкаЧервоноградЧервоногригоровкаЧернаяЧерневцы, Винницкая обл.ЧерниговкаЧернобаевкаЧернобайЧерноморскЧерноморскоеЧернухиЧерняховЧечельникЧигиринЧижовкаЧистяковоЧкаловскоеЧопЧортковЧубинскоеЧугуевЧудновЧукваЧумакиЧутовоШаргородШахтерскШацкШевченковоШепетовкаШирокоеШиряевоШишакиШосткаШполаШумскЩелкиноЭнергодарЮжноукраинскЮжныйЮринцыЮрковцыЮрьевкаЯворовЯготинЯлта, Донецкая обл.Ялта, КрымЯмполь, Винницкая обл.Ямполь, Сумская обл.Яны Капу (Красноперекопск)ЯремчеЯреськиЯрмолинцыЯсиноватаяЯсиня |
Японские роботы успешно приземлились на астероид и прислали фото
Автор фото, JAXA
Два японских миниробота MINERVA-II1A и MINERVA-II1B успешно приземлились на поверхность астероида Рюгу. Оба находятся в хорошем состоянии и передают с астероида фотографии и данные, сообщается на сайте японского агентства аэрокосмических исследований (JAXA).
Оба находятся в хорошем состоянии и передают с астероида фотографии и данные, сообщается на сайте японского агентства аэрокосмических исследований (JAXA).
Роботы отделились от японского космического зонда “Хаябуса-2” 21 сентября. По меньшей мере один из них сейчас движется по поверхности астероида, пишет агентство.
MINERVA-II1 – это первые в мире мобильные исследовательские роботы, которые высадились на поверхность астероида. Каждый робот весит всего один килограмм. Эти роботы впервые смогли автономно передвигаться и делать фотографии на поверхности астероида.
“Я был так тронут тем, что эти маленькие самоходные аппараты успешно исследуют поверхность астероида, потому что мы не смогли этого добиться 13 лет назад. Меня особенно впечатлили изображения, сделанные с близкого расстояния на поверхности астероида”, – сказал руководитель миссии проекта “Хаябуса-2” Макото Йошикава.
Автор фото, JAXA
Підпис до фото,Минироботы MINERVA-II1A и MINERVA-II1B передвигаются с помощью прыжков
Всего команда зонда “Хаябуса-2” опубликовала три изображения, сделанных роботами. Изображения получились размытыми, так как одно из них робот сделал во время вращения, а другое – в момент прыжка. Кроме того, на них получились цветовые пятна из-за отражения солнечного света.
Изображения получились размытыми, так как одно из них робот сделал во время вращения, а другое – в момент прыжка. Кроме того, на них получились цветовые пятна из-за отражения солнечного света.
Автор фото, Twitter/HAYABUSA2@JAXA
Підпис до фото,Из-за солнечного света на фотографии, сделанной роботом, получились белые пятна
“Хоть я и был разочарован размытым изображением, но тут важно то, что оно было сделано самоходным аппаратом. Более того, фотография, сделанная в момент прыжка робота на поверхность астероида, подтвердила эффективность такого механизма движения”, – сказал ответственный за проект MINERVA-II1 Тетсуо Йошимицу.
Автор фото, JAXA
Підпис до фото,Робот MINERVA-II1A сделал эту фотографию после отделения от космического корабля. В правом нижнем углу – поверхность астероида Рюгу
В чем заключается миссия “Хаябуса-2”?
Миссия “Хаябуса-2” началась в 2014 году. Ее стоимость составляет $150 млн. Космический зонд “Хаябуса-2” летел к астероиду Рюгу три с половиной года и добрался до него в конце июня.
Космический зонд “Хаябуса-2” летел к астероиду Рюгу три с половиной года и добрался до него в конце июня.
Задачи зонда – изучить астероид и доставить на Землю образцы пород, из которых он состоит. “Прежде всего, мы очень внимательно изучим рельеф поверхности. Затем выберем место посадки. Именно там будут собраны пробы пород”, – рассказывал руководитель проекта Йошикава.
Автор фото, JAXA, Uni Tokyo & collaborators
Підпис до фото,Зонд “Хаябуса-2” добрался до астероида Рюгу в конце июня
Диаметр астероида Рюгу составляет около 900 метров, он совершает полный оборот вокруг своей оси за семь с половиной часов. Он находится в 290 млн км от Земли. “Хаябуса-2” проведет на орбите вокруг Рюгу около полутора лет.
Рюгу принадлежит к астероидам класса С, которые считаются относительно примитивными. Это значит, что на его поверхности могут оказаться органические материалы и гидраты. Изучение химического состава Рюгу может помочь ученым понять ранные этапы эволюции Солнечной системы.
Илон Маск анонсировал создание робота-гуманоида Tesla Bot
Илон Маск. Фото EPA-EFE
20 августа, Минск /Корр. БЕЛТА/. Глава американской компании Tesla Илон Маск анонсировал создание робота-гуманоида Tesla Bot, сообщает Deutsche Welle.Прототип андроида может появиться уже в 2022 году, сообщил
Илон Маск на организованном Tesla Дне искусственного интеллекта. Tesla
Bot будет выполнять работу, связанную с нейронными сетями и новым
суперкомпьютером Dojo.
Высота робота составит около 173 см, вес - 57 кг. Вместо лица у него будет экран, на котором будет отображаться полезная информация. Передвигаться андроид сможет со скоростью 8 км/ч, а его зрение обеспечат камеры для самоуправляющихся автомобилей Tesla.
По словам Илона Маска, Tesla Bot сможет выполнять различные рутинные действия, а в случае необходимости, и сопряженные с определенными рисками задачи. Изобретатель также отметил, что появление робота изменит мировую экономику.-0-
Мобильный манипуляционный робот KUKA youBot
Это малый настольный робот производства немецкой фирмы KUKA Roboter. Именно с него начался проект нового бездатчикового алгоритма, который разрабатывается в Международной лаборатории «Геометрические методы управления и приложения».
Именно с него начался проект нового бездатчикового алгоритма, который разрабатывается в Международной лаборатории «Геометрические методы управления и приложения».
В стандартных промышленных роботах программный код является закрытым, то есть недоступным для сторонних разработчиков — в первую очередь из соображений безопасности. У Kuka доступ к коду открыт. Будучи весьма маломощным, он не может навредить человеку, поэтому является удобным объектом для исследования и тестирования новых алгоритмов управления, а также для обучения студентов навыкам работы с реальным оборудованием.
Изначально робот умел только двигаться из точки в точку. Сотрудники лаборатории дописали для него программу планирования траектории движения, чтобы он двигался в пространстве в определенные моменты времени с заданной скоростью. Но главное, что именно Kuka стал первым роботом в лаборатории, в котором удалось реализовать алгоритм бездатчикового управления по силе — взаимодействие с окружающей средой он измеряет по косвенным показателям, в частности, по датчикам тока, которые изначально есть в двигателе любого робота.
Программное обеспечение, написанное для Kuka специалистами из ИТМО, легко переносится и масштабируется для более крупных манипуляционных роботов, так как описана математическая модель в общем виде. Это позволяет на программном уровне внедрять алгоритмы управления по силе в роботов, которые изначально для этого не были предназначены.
За счет программной реализации расширяется круг задач, которые могут решать роботы ― например, контролировать силу своего воздействия при работе с хрупкими предметами. Также решается проблема безопасности: классические роботы не понимают, присутствует рядом с ними человек или нет, и могут легко нанести ему травму — для этого им нужно дополнительные адаптеры. Бездатчиковые алгоритмы же не требуют дополнительных модификаций в самих роботах, что экономит значительные средства конечным потребителям из сектора индустрии.
Сейчас на Kuka тестируются системы технического зрения и распознавания объектов — чтобы робот мог не только самостоятельно взаимодействовать с объектами вокруг себя, но и понимать, что это за объекты, давать им оценку и разделять по категориям.
владивостокцы посетили «Тусовку роботов» – Новости Владивостока на VL.ru
В воскресенье, 7 февраля, во Владивостоке прошла «Тусовка роботов». В День робототехники тренеры разных клубов города представили свои модели, показали, как собирать и программировать самые простые. Гости мероприятия попробовали управлять подводным роботом и виртуальным квадрокоптером, напечатали детали на 3D-принтере, сыграли в автоматизированный футбол.
Гостей Дня робототехники встречали в 13:00 в мультимедийном историческом парке на Аксаковской, 12. Выставка моделей разместилась на первом этаже. Уже к началу праздника перед столами с роботами собрались очереди. Тренеры рассказывали про модели, учили, как управлять манипуляторами.
На футбольном поле дети учились управлять машинами со специальными клешнями для захвата мяча. Голы модели забивали редко, зато часто сталкивались. Рядом с футболом посетители пробовали с помощью робота поднять пластиковый стаканчик силой мысли. Желающих послать сигнал роботу-руке просили надеть на голову ленту с датчиком, сконцентрироваться, посчитать что-то в уме, вспомнить стихотворение или представить, как рука робота поднимает стакан.
Голы модели забивали редко, зато часто сталкивались. Рядом с футболом посетители пробовали с помощью робота поднять пластиковый стаканчик силой мысли. Желающих послать сигнал роботу-руке просили надеть на голову ленту с датчиком, сконцентрироваться, посчитать что-то в уме, вспомнить стихотворение или представить, как рука робота поднимает стакан.
«Это рука, управляемая силой мысли. Из биологии известно, что все наши нервные импульсы – это электрические сигналы, организм их генерирует. Если есть электрический сигнал, то должно быть и магнитное поле. Оказалось, что достаточно одного датчика, чтобы считать примерно 90% волн. Датчик рассчитывает их активность, по блютусу передаётся сигнал в компьютер, который расшифровывает его и посылает по проводу в плату. Плата уже выполняет определённые действия. На такой технологии – нейроинтерфейсе – можно сделать что угодно», – рассказал Данил Шевченко, тренер клуба «Роботрек».
Здесь же гости «Тусовки роботов» знакомились с арфой из семи лазерных струн, каждая из которых имеет свою ноту. Написали имена детей с помощью робота-принтера: аппарат закодирован азбукой Морзе, посмотрели, как работает робот – швейная машинка. Счастливчикам удалось отстоять в очереди и напечатать значок на 3D-принтере. Толпа собралась и у бассейна с подводным роботом. Кто будет управлять моделью следующим, определяли между собой в детской игре «камень-ножницы», чтобы никому не было обидно.
Написали имена детей с помощью робота-принтера: аппарат закодирован азбукой Морзе, посмотрели, как работает робот – швейная машинка. Счастливчикам удалось отстоять в очереди и напечатать значок на 3D-принтере. Толпа собралась и у бассейна с подводным роботом. Кто будет управлять моделью следующим, определяли между собой в детской игре «камень-ножницы», чтобы никому не было обидно.
Два робота на выставке получали сигнал к действию с мобильных устройств. Для этого посетители считывали телефонами QR-код и нажимали предлагаемые кнопки. Модели начинали набирать воду в ёмкость, крутить лопасти вентилятора. Была и настоящая «рука робота». Манипулятор с помощью датчиков подключался к руке и повторял движения человека – сжимал пальцы в кулак или расслаблял кисть.
Обновлено 23:56: Центр проектной деятельности ДВФУ представил подводного робота «Сокол тысячелетия» и надводный аппарат «Аквилла». Аппараты можно использовать для наблюдений в реальных условиях.
«Пилот управляет аппаратом через поплавок. Раньше подводный аппарат был ограничен длиной провода, мы кидали его с пирса по длине. Сейчас он ограничен длиной сигнала, который передаёт «поплавок». Мы можем управлять на расстоянии в километры. Модель погружается вглубь около 100 метров и имеет скорость 1 метр в секунду», – рассказал Платон Пряженников, студент Центра проектной деятельности ДВФУ.
Раньше подводный аппарат был ограничен длиной провода, мы кидали его с пирса по длине. Сейчас он ограничен длиной сигнала, который передаёт «поплавок». Мы можем управлять на расстоянии в километры. Модель погружается вглубь около 100 метров и имеет скорость 1 метр в секунду», – рассказал Платон Пряженников, студент Центра проектной деятельности ДВФУ.
«Понравилось участвовать в мастер-классе, где собирали робота из лего и его программировали. Хотя я всё это знаю, но было интересно вспомнить. Порадовало, что много моделей на выставке. Впечатлили подводные роботы от клуба ДВФУ. Хорошо, что представители центров робототехники много рассказывают о своих объектах: для чего они, какие функции выполняет, как это работает. Было полезно узнать, где в действии применяют их для общества», – поделились впечатлениями гости Екатерина с сыном Антоном.
В течение дня прошли мастер-классы, конкурсы, викторины, презентации, уроки от представителей клубов «Как попасть на соревнования по подводной робототехнике?» и «Нейроинтерфейс», гонка роботов по исторической экспозиции «Рюриковичи». Победителей наградили подарками и сертификатами.
Победителей наградили подарками и сертификатами.
робот-распознаватель изображений с пистормами и пи-камерой
Выберите значки
Прежде чем писать программу, вы должны создать новую папку на Raspberry Pi. Эта папка будет содержать вашу программу распознавания изображений, а также все значки, которые вы хотите, чтобы программа идентифицировала.
Пример создания новой папки для нашей программы распознавания иконок:
sudo mkdir /home/pi/PiStorms/programs/09-IconTracker
Программа, которую мы создадим сегодня, потребует .png, и им понадобится квадратная рамка вокруг них. Ниже приведены примеры значков, которые вы можете использовать. Эти значки используются программами распознавания изображений Polylander. Смотрите видео для получения дополнительной информации.
Пример изображений .png:
Adult.png
circle-arrow-left.png
-right.png», просто повернув изображение)
map-marker-alt. png
Когда программа запустится, она проверит все другие файлы .png, которые находятся в той же папке, что и программа, и эти изображения будут теми, которые программа обучена распознавать. Когда он увидит изображение, программа вернет имя этого значка (например: «adult.png»).
Написание программы распознавания значков
После того, как вы настроили папку со значками, которые хотите идентифицировать, теперь мы можем написать программу Python, которая будет идентифицировать значок и возвращать его имя! Выполните следующие действия, чтобы написать программу.
Во-первых, нам нужно импортировать библиотеки, необходимые для запуска программы PiStorms, а также библиотеки, необходимые для камеры Pi, и некоторый дополнительный код установки:
из picamera.array import PiRGBArray из пикамера импорт PiCamera из PiStorms импортировать PiStorms импорт cv2 импорт систем, ОС импортировать imutils импортировать numpy как np импортировать argparse, время импортный осмотр currentdir = os.path.dirname(os.path.abspath(inspect.getfile(inspect.currentframe())))) parentdir = os.path.dirname(currentdir) сис.path.insert (0, родительский каталог) psm = PiStorms ()
Во-вторых, мы собираемся написать код для функции «обучения». Это проверяет файлы .png, которые находятся в той же папке, что и программа. Затем он берет эти изображения, преобразует их в оттенки серого и преобразует в массив, чтобы сохранить их в форме, которую программа может распознать.
class icontracker:
обучение = {}
версия = ''
# Генерируем словарь изображений и сохраняем его в памяти
# Каждое изображение 200x200
защита __init__(сам):
себя.обучение = self.get_training()
собственная версия = '1.00'
деф get_training (я):
путь = текущий каталог
обучение = {}
файлы = os.listdir(путь)
files_png = [i для i в файлах, если i.endswith('.png')]
напечатать "файлы_png: ", файлы_png
для файла в files_png :
imR = cv2. imread (текущий каталог + "/" + файл)
# выполнить фактическое изменение размера изображения и показать его
imR = self.preprocess (imR)
обучение [файл] = imR
return training
imread (текущий каталог + "/" + файл)
# выполнить фактическое изменение размера изображения и показать его
imR = self.preprocess (imR)
обучение [файл] = imR
return training Далее мы определим функцию для захвата изображения с камеры Pi.
# Захватывает одно изображение с камеры и возвращает его в формате PIL
def get_image (я, камера):
# read — самый простой способ получить полное изображение из объекта VideoCapture.
ретвал, ig = camera.read()
верни меня
Теперь мы можем перейти к нашему коду распознавания изображений. Давайте определим еще несколько функций:
######################################### #######################################
# Сопоставление изображений
################################################### ##############################
Предварительный процесс защиты (я, изображение):
серый = cv2.cvtColor (изображение, cv2.COLOR_BGR2GRAY)
размытие = cv2. GaussianBlur (серый, (5,5), 5)
порог = cv2.adaptiveThreshold (размытие, 255, 1, 1, 11, 1)
возвратный обмолот
определение imgdiff (я, img1, img2):
img1 = cv2.Размытие по Гауссу (img1, (5,5), 5)
img2 = cv2.Размытие по Гауссу (img2, (5,5), 5)
разница = cv2.absdiff(img1,img2)
diff = cv2.Размытие по Гауссу (diff, (5,5), 5)
флаг, diff = cv2.threshold(diff, 200, 255, cv2.THRESH_BINARY)
вернуть np.sum(diff)
def find_closest_card (я, обучение, изображение):
функции = предварительная обработка (изображение)
вернуть отсортированный (обучение.значения (), ключ = лямбда x: imgdiff (x [1], функции)) [0] [0]
GaussianBlur (серый, (5,5), 5)
порог = cv2.adaptiveThreshold (размытие, 255, 1, 1, 11, 1)
возвратный обмолот
определение imgdiff (я, img1, img2):
img1 = cv2.Размытие по Гауссу (img1, (5,5), 5)
img2 = cv2.Размытие по Гауссу (img2, (5,5), 5)
разница = cv2.absdiff(img1,img2)
diff = cv2.Размытие по Гауссу (diff, (5,5), 5)
флаг, diff = cv2.threshold(diff, 200, 255, cv2.THRESH_BINARY)
вернуть np.sum(diff)
def find_closest_card (я, обучение, изображение):
функции = предварительная обработка (изображение)
вернуть отсортированный (обучение.значения (), ключ = лямбда x: imgdiff (x [1], функции)) [0] [0]
Чтобы узнать, нашли ли мы нашу иконку, робот должен видеть квадратную рамку вокруг изображения. Эта функция увидит, имеет ли значок перед ним квадратную рамку.
def findSquare(self,frame):
серый = cv2.cvtColor (изображение, cv2.COLOR_BGR2GRAY)
размытый = cv2.GaussianBlur (серый, (7, 7), 0)
края = cv2. Canny(размыто, 60, 60)
# найти контуры на карте ребер
(цнт, _) = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# цикл по нашим контурам, чтобы найти шестиугольник
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:50]
screenCnt = Нет
для с в центах:
# аппроксимировать контур
пери = cv2.arcLength(c, True)
приблизительно = cv2.приблизительноPolyDP(c, 0,004 * пери, True)
# если наш приближенный контур имеет четыре точки, то
# можно считать, что мы нашли наш квадрат
если len(приблизительно) >= 4:
screenCnt = приблизительно
х, у, ш, ч = cv2.ограничивающий прямоугольник (с)
cv2.drawContours (изображение, [приблизительно], -1, (0, 0, 255), 1)
# создаем маску и удаляем остальную часть фона
маска = np.zeros(image.shape[:2], dtype = "uint8")
cv2.
Canny(размыто, 60, 60)
# найти контуры на карте ребер
(цнт, _) = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# цикл по нашим контурам, чтобы найти шестиугольник
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:50]
screenCnt = Нет
для с в центах:
# аппроксимировать контур
пери = cv2.arcLength(c, True)
приблизительно = cv2.приблизительноPolyDP(c, 0,004 * пери, True)
# если наш приближенный контур имеет четыре точки, то
# можно считать, что мы нашли наш квадрат
если len(приблизительно) >= 4:
screenCnt = приблизительно
х, у, ш, ч = cv2.ограничивающий прямоугольник (с)
cv2.drawContours (изображение, [приблизительно], -1, (0, 0, 255), 1)
# создаем маску и удаляем остальную часть фона
маска = np.zeros(image.shape[:2], dtype = "uint8")
cv2. drawContours (маска, [screenCnt], -1, 255, -1)
замаскированный = cv2.bitwise_and (изображение, изображение, маска = маска)
#обрезать замаскированное изображение для сравнения с эталонным изображением
обрезано = замаскировано[y:y+h,x:x+w]
# масштабировать изображение, чтобы оно было фиксированного размера в качестве эталонного изображения
обрезано = cv2.изменить размер (обрезано, (200 200), интерполяция = cv2.INTER_AREA)
возврат обрезанный
drawContours (маска, [screenCnt], -1, 255, -1)
замаскированный = cv2.bitwise_and (изображение, изображение, маска = маска)
#обрезать замаскированное изображение для сравнения с эталонным изображением
обрезано = замаскировано[y:y+h,x:x+w]
# масштабировать изображение, чтобы оно было фиксированного размера в качестве эталонного изображения
обрезано = cv2.изменить размер (обрезано, (200 200), интерполяция = cv2.INTER_AREA)
возврат обрезанный
Осталось еще две функции. Последние два используются для поиска и идентификации значка:
def locate_target( self,frame ):
# найдите квадратное изображение логотипа из нашего изображения
self.target = self.preprocess (self.findSquare (кадр))
вернуть self.target
определение_цели_определения(я,кадр):
результаты = {}
для файла в себе.обучение :
результаты [файл] = self. imgdiff (self.locate_target (кадр), self.training [файл])
x = min (((e) для e в результатах, если e), key=results.get)
вернуть х
imgdiff (self.locate_target (кадр), self.training [файл])
x = min (((e) для e в результатах, если e), key=results.get)
вернуть х
Теперь пришло время объединить эти функции в единую программу, чтобы мы могли идентифицировать значки! Во-первых, нам нужно инициализировать Pi Camera, настроив разрешение и частоту кадров.
если __name__ == '__main__':
значок = icontracker()
значок печати.обучение
значок печати.версия
# Теперь мы можем инициализировать объект захвата камеры с помощью файла cv2.Класс видеозахвата.
# Все, что ему нужно, это индекс порта камеры.
камера = PiCamera()
камера.разрешение = (320, 240)
rawCapture = PiRGBArray (камера, размер = (320, 240))
камера.частота кадров = 30
Теперь мы будем «наращивать» камеру, которая будет отбрасывать кадры по мере того, как камера устанавливается.
# Разгон камеры - эти кадры будут отбрасываться и использоваться только для разрешения v4l2
# для регулировки уровня освещенности, если это необходимо
'''
для i в xrange (ramp_frames):
температура = значок. get_image(камера)
'''
я =0
последний раз = время.время()
get_image(камера)
'''
я =0
последний раз = время.время()
Обработка изображения, снятого камерой, чтобы мы могли сравнить его с изображениями из «обучения»:
для кадра в camera.capture_continuous(rawCapture, format="bgr", use_video_port=True):
# получаем необработанный массив NumPy, представляющий изображение, затем инициализируем метку времени
# и занятый/незанятый текст
я = я + 1
изображение = кадр.массив
серый = cv2.cvtColor (изображение, cv2.COLOR_BGR2GRAY)
напечатать я
'''
# найдите квадратное изображение логотипа из нашего изображения
цель = знач.предварительная обработка (icn.findSquare (изображение))
cv2.imshow('цель',цель)
cv2.waitKey(0)
напечатать «цель», target.shape
результаты = {}
для файла в icn.training:
результаты [файл] = icn.imgdiff (цель, icn.training [файл])
напечатать мин.(результаты, ключ=results. get)
'''
get)
'''
Наконец, в последней части программы распознавания изображений мы сохраним имя изображения, которое идентифицировал робот, в переменной с именем «img». Робот напечатает название изображения на экране PiStorms (например: «adult.png»), а также отметку времени. Теперь мы можем запрограммировать случаи, когда робот будет реагировать на идентифицированное изображение.
img = icon.identify_target(изображение)
напечатать "идентифицировано:", img
psm.screen.termPrintAt(7, "count: " + str(i))
psm.screen.termPrintAt(8, "идентифицировано: " + str(img))
напечатать 1000*(время.время() - последний раз)
последний раз = время.время()
# очищаем поток для подготовки к следующему кадру
rawCapture.truncate(0)
Программирование реакции робота на значки
Теперь мы можем запрограммировать нашего робота так, чтобы он реагировал на любой распознанный им значок.
Напомним, что на последнем шаге мы завершили часть программы распознавания изображений, сохранив имя идентифицированного изображения в переменной с именем «img». Теперь мы заставим робота считать эту переменную и запрограммировать реакции на основе того, какое изображение будет идентифицировано.
Теперь мы заставим робота считать эту переменную и запрограммировать реакции на основе того, какое изображение будет идентифицировано.
Для этого у нас будет оператор if для каждого изображения, на которое мы хотим, чтобы робот реагировал в этой программе, за которым следует серия команд, которые мы хотим, чтобы робот выполнил после того, как увидит значок.Это должно выглядеть примерно так (не забудьте заменить «image_name.png» на фактическое имя изображения):
if (img == «image_name.png»):
# сделай что-нибудь
Вот пример того, как это сделать, взятый непосредственно из программы Polylander «PolylanderIconArrow.py». Эта программа идентифицирует значки со стрелками. Как только значок идентифицирован, Polylander отображает его на экране и рулит в направлении, указанном стрелкой:
if (img == "circle-arrow-left.png"):
# Повернуть налево:
psm.screen.fillBmp(30, 0, 240, 240, path = currentdir+'/'+"circle-arrow-left.png")
psm.BAM1.setSpeed(100)
psm. BAM2.setSpeed(30)
если (img == "circle-arrow-right.png"):
# Поверни направо:
psm.screen.fillBmp(30, 0, 240, 240, path = currentdir+'/'+"circle-arrow-right.png")
psm.BAM1.setSpeed(30)
psm.BAM2.setSpeed(100)
если (img == "circle-arrow-up.png"):
# Ехать вперед:
psm.screen.fillBmp(30, 0, 240, 240, path = currentdir+'/'+"круг-стрелка вверх.png")
psm.BAM1.setSpeed(75)
psm.BAM2.setSpeed(75)
BAM2.setSpeed(30)
если (img == "circle-arrow-right.png"):
# Поверни направо:
psm.screen.fillBmp(30, 0, 240, 240, path = currentdir+'/'+"circle-arrow-right.png")
psm.BAM1.setSpeed(30)
psm.BAM2.setSpeed(100)
если (img == "circle-arrow-up.png"):
# Ехать вперед:
psm.screen.fillBmp(30, 0, 240, 240, path = currentdir+'/'+"круг-стрелка вверх.png")
psm.BAM1.setSpeed(75)
psm.BAM2.setSpeed(75)
Важно отметить, что если вы не запрограммируете это, камера не будет продолжать захватывать и идентифицировать новые изображения в операторе if, поэтому старайтесь, чтобы они были короткими.
Может быть разумно выбрать случай, когда робот ничего не видит (то есть img = «none.png»). Это будет случай по умолчанию, если значок не обнаружен. Ниже приведен пример из программы Polylander, которая останавливает робота и очищает экран, если изображения не видно:
if (img == "none.png"):
# Если изображение не найдено, останавливаемся:
psm.screen.clearScreen()
psm.BAM1. тормоз()
psm.BAM2.тормоз()
тормоз()
psm.BAM2.тормоз()
Наконец, последний фрагмент кода очень важен. Этот фрагмент кода закроет программу, если будет нажата кнопка «GO», предоставляя возможность выйти из программы и вернуться в браузер PiStorms. Этот фрагмент кода должен располагаться сразу после всех остальных ваших операторов изображения «если».
# Выход из программы:
если (psm.isKeyPressed()):
псм.BBM1.тормоз()
psm.BAM1.тормоз()
psm.BAM2.тормоз()
psm.screen.clearScreen()
psm.screen.termPrintAt(9, "Выход в меню")
время сна (0,5)
покидать()
Посмотрите программу распознавания изображений в действии на роботизированном танке Polylander, созданном с помощью PiStorms:
Загрузка программы
Почему CAPTCHA стало так сложно
В какой-то момент прошлого года постоянные запросы Google доказать, что я человек, стали казаться все более агрессивными. Все чаще за простой, немного слишком милой кнопкой с надписью «Я не робот» следовали требования доказать это — выбирая все светофоры, пешеходные переходы и витрины в сетке изображений. Вскоре светофоры утонули в далекой листве, пешеходные переходы искривились и оказались наполовину за углом, вывески на витринах расплылись и написаны на корейском языке. Есть что-то особенно удручающее в том, что вас просят опознать пожарный гидрант и вы пытаетесь с этим справиться.
Все чаще за простой, немного слишком милой кнопкой с надписью «Я не робот» следовали требования доказать это — выбирая все светофоры, пешеходные переходы и витрины в сетке изображений. Вскоре светофоры утонули в далекой листве, пешеходные переходы искривились и оказались наполовину за углом, вывески на витринах расплылись и написаны на корейском языке. Есть что-то особенно удручающее в том, что вас просят опознать пожарный гидрант и вы пытаетесь с этим справиться.
Эти тесты называются CAPTCHA, аббревиатура от «Полностью автоматизированный общедоступный тест Тьюринга для определения компьютеров и людей отдельно».В начале 2000-х простых изображений текста было достаточно, чтобы поставить в тупик большинство спам-ботов. Но десятилетие спустя, после того как Google купила программу у исследователей Карнеги-Меллона и использовала ее для оцифровки Google Книг, тексты приходилось все больше искажать и затемнять, чтобы оставаться впереди совершенствующихся программ оптического распознавания символов — программ, которые окольными путями, все те люди, которые разгадывали CAPTCHA, помогали совершенствоваться.
Все эти навесы, которые могут быть витринами, а могут и не быть? Они являются конечным пунктом в гонке вооружений человечества с машинами.
Поскольку CAPTCHA является таким элегантным инструментом для обучения ИИ, любой конкретный тест может быть только временным, что с самого начала признавали его изобретатели. Со всеми этими исследователями, мошенниками и обычными людьми, решающими миллиарды головоломок на пороге возможностей ИИ, в какой-то момент машины обойдут нас стороной. В 2014 году Google сравнил один из своих алгоритмов машинного обучения с людьми при разгадывании самых искаженных текстовых CAPTCHA: компьютер правильно прошел тест 99.8 процентов времени, в то время как у людей всего 33 процента.
Google затем перешел на NoCaptcha ReCaptcha, которая наблюдает за данными и поведением пользователей, позволяя некоторым людям пройти через нажатие кнопки «Я не робот», и представляет другим маркировку изображений, которую мы видим сегодня. Но машины снова наверстывают упущенное. Все эти навесы, которые могут быть витринами, а могут и не быть? Они являются конечным пунктом в гонке вооружений человечества с машинами.
Все эти навесы, которые могут быть витринами, а могут и не быть? Они являются конечным пунктом в гонке вооружений человечества с машинами.
Джейсон Полакис, профессор информатики Иллинойского университета в Чикаго, берет на себя ответственность за недавнее увеличение сложности CAPTCHA.В 2016 году он опубликовал статью, в которой использовал готовые инструменты распознавания изображений, в том числе собственный обратный поиск изображений Google, для решения CAPTCHA Google с точностью до 70 процентов. Другие исследователи преодолели аудио-проблемы Google CAPTCHA, используя собственные программы распознавания звука Google.
По словам Полакиса, машинное обучение теперь так же хорошо справляется с основными задачами распознавания текста, изображений и голоса, как и люди. На самом деле, алгоритмы, вероятно, справляются с этим лучше: «Мы находимся на этапе, когда усложнение работы программного обеспечения в конечном итоге делает его слишком сложным для многих людей.Нам нужна какая-то альтернатива, но конкретного плана пока нет».
Проблема со многими из этих тестов не обязательно в том, что боты слишком умны, а в том, что люди их не умеют
Литература по CAPTCHA изобилует фальстартами и странными попытками найти что-то иное, чем распознавание текста или изображения, в чем люди хорошо разбираются, а машины борются. Исследователи пытались попросить пользователей классифицировать изображения людей по выражению лица, полу и этнической принадлежности.(Можете себе представить, как хорошо это получилось.) Были предложения ввести викторины CAPTCHA и CAPTCHA, основанные на детских стишках, распространенных в районе, где пользователь якобы вырос. Такие культурные CAPTCHA нацелены не только на ботов, но и на людей, работающих на зарубежных CAPTCHA-фермах, решающих головоломки за доли цента. Люди пытались заблокировать распознавание изображений, прося пользователей идентифицировать, скажем, свиней, но создавая мультфильмы о свиньях и давая им солнцезащитные очки. Исследователи попросили пользователей идентифицировать объекты в пятнах, похожих на волшебный глаз. В интригующем варианте исследователи в 2010 году предложили использовать CAPTCHA для индексации древних петроглифов, поскольку компьютеры не очень хорошо расшифровывают жесты оленей, нацарапанные на стенах пещеры.
В интригующем варианте исследователи в 2010 году предложили использовать CAPTCHA для индексации древних петроглифов, поскольку компьютеры не очень хорошо расшифровывают жесты оленей, нацарапанные на стенах пещеры.
В последнее время были предприняты усилия по разработке похожих на игру CAPTCHA, тестов, требующих от пользователей поворота объектов на определенные углы или перемещения кусочков головоломки в нужное положение с инструкциями, данными не в тексте, а в виде символов или подразумеваемых контекстом игрового поля. Есть надежда, что люди поймут логику головоломки, но компьютеры, не имеющие четких инструкций, окажутся в тупике.Другие исследователи пытались использовать тот факт, что у людей есть тела, используя камеры устройств или дополненную реальность для интерактивного доказательства человечности.
Проблема со многими из этих тестов не обязательно в том, что боты слишком умны, а в том, что люди их не умеют. И дело не в том, что люди глупы; дело в том, что люди очень разнообразны по языку, культуре и опыту. Как только вы избавитесь от всех этих вещей, чтобы сделать тест, который может пройти любой человек, без предварительной подготовки или долгих раздумий, вы останетесь с грубыми задачами, такими как обработка изображений, а это именно то, чем должен быть сделанный на заказ ИИ. хорош в.
Как только вы избавитесь от всех этих вещей, чтобы сделать тест, который может пройти любой человек, без предварительной подготовки или долгих раздумий, вы останетесь с грубыми задачами, такими как обработка изображений, а это именно то, чем должен быть сделанный на заказ ИИ. хорош в.
«Испытания ограничены человеческими возможностями, — говорит Полакис. «Дело не только в наших физических возможностях, вам нужно что-то, что [может] межкультурное, межъязыковое. Вам нужен какой-то вызов, который работает с кем-то из Греции, с кем-то из Чикаго, с кем-то из Южной Африки, Ирана и Австралии одновременно. И он должен быть независим от культурных сложностей и различий. Вам нужно что-то простое для обычного человека, не привязанное к определенной подгруппе людей, и в то же время сложное для компьютеров.Это очень ограничивает то, что вы на самом деле можете сделать. И это должно быть что-то, что человек может сделать быстро и не слишком раздражает».
Выяснение того, как исправить эти викторины с размытыми изображениями, быстро приведет вас на философскую территорию: какое универсальное человеческое качество может быть продемонстрировано машине, но которое никакая машина не может имитировать? Что такое быть человеком?
Но, возможно, наша человечность измеряется не тем, как мы справляемся с задачей, а тем, как мы перемещаемся по миру — или, в данном случае, через Интернет. Игровые CAPTCHA, видео CAPTCHA, любой тест CAPTCHA, который вы придумаете, в конечном итоге будет взломан, говорит Шуман Гоземаджумдер, который ранее работал в Google над борьбой с мошенничеством с кликами, а затем стал техническим директором компании Shape Security, занимающейся обнаружением ботов. Вместо тестов он предпочитает так называемую «непрерывную аутентификацию», по существу наблюдающую за поведением пользователя и ищущую признаки автоматизации. «Настоящие люди не очень хорошо контролируют свои собственные двигательные функции, поэтому они не могут перемещать мышь одним и тем же образом более одного раза в течение нескольких взаимодействий, даже если очень стараются», — говорит Госемаюмдер.В то время как бот будет взаимодействовать со страницей, не двигая мышью, или очень точно перемещая мышь, действия человека обладают «энтропией», которую трудно подделать, говорит Госемаюмдер.
Игровые CAPTCHA, видео CAPTCHA, любой тест CAPTCHA, который вы придумаете, в конечном итоге будет взломан, говорит Шуман Гоземаджумдер, который ранее работал в Google над борьбой с мошенничеством с кликами, а затем стал техническим директором компании Shape Security, занимающейся обнаружением ботов. Вместо тестов он предпочитает так называемую «непрерывную аутентификацию», по существу наблюдающую за поведением пользователя и ищущую признаки автоматизации. «Настоящие люди не очень хорошо контролируют свои собственные двигательные функции, поэтому они не могут перемещать мышь одним и тем же образом более одного раза в течение нескольких взаимодействий, даже если очень стараются», — говорит Госемаюмдер.В то время как бот будет взаимодействовать со страницей, не двигая мышью, или очень точно перемещая мышь, действия человека обладают «энтропией», которую трудно подделать, говорит Госемаюмдер.
Собственная команда Google CAPTCHA думает примерно так же. Последняя версия, reCaptcha v3, анонсированная в конце прошлого года, использует «адаптивный анализ рисков» для оценки трафика в зависимости от того, насколько подозрительным он кажется; Владельцы веб-сайтов могут затем решить, чтобы предоставить поверхностным пользователям вызов, например, запрос пароля или двухфакторную аутентификацию. По словам Сай Хормаи, менеджера по продукту в команде CAPTCHA, Google не сказал бы, какие факторы влияют на этот показатель, за исключением того, что Google наблюдает за тем, как выглядит группа «хорошего трафика» на сайте, и использует это для обнаружения « плохой трафик». Исследователи безопасности говорят, что это, вероятно, сочетание файлов cookie, атрибутов браузера, шаблонов трафика и других факторов. Одним из недостатков новой модели обнаружения ботов является то, что она может сделать навигацию в Интернете, сводя к минимуму слежку, раздражающим занятием, поскольку такие вещи, как VPN и расширения для защиты от отслеживания, могут пометить вас как подозрительных и брошенных вызовов.
По словам Сай Хормаи, менеджера по продукту в команде CAPTCHA, Google не сказал бы, какие факторы влияют на этот показатель, за исключением того, что Google наблюдает за тем, как выглядит группа «хорошего трафика» на сайте, и использует это для обнаружения « плохой трафик». Исследователи безопасности говорят, что это, вероятно, сочетание файлов cookie, атрибутов браузера, шаблонов трафика и других факторов. Одним из недостатков новой модели обнаружения ботов является то, что она может сделать навигацию в Интернете, сводя к минимуму слежку, раздражающим занятием, поскольку такие вещи, как VPN и расширения для защиты от отслеживания, могут пометить вас как подозрительных и брошенных вызовов.
«Я думаю, что люди понимают, что существует приложение для имитации обычного пользователя-человека… или глупых людей».
Аарон Маленфант, ведущий инженер команды Google по CAPTCHA, говорит, что отказ от тестов Тьюринга призван обойти конкуренцию, которую люди продолжают проигрывать. «По мере того, как люди вкладывают все больше и больше средств в машинное обучение, такие задачи должны становиться все сложнее и сложнее для людей, и именно поэтому мы запустили CAPTCHA V3, чтобы опередить эту кривую. Маленфант говорит, что через пять-десять лет вызовы CAPTCHA, скорее всего, вообще не будут жизнеспособными. Вместо этого большая часть Интернета будет иметь постоянный секретный тест Тьюринга, работающий в фоновом режиме.
Маленфант говорит, что через пять-десять лет вызовы CAPTCHA, скорее всего, вообще не будут жизнеспособными. Вместо этого большая часть Интернета будет иметь постоянный секретный тест Тьюринга, работающий в фоновом режиме.
В своей книге «Самый человечный человек » Брайан Кристиан участвует в конкурсе «Тест Тьюринга» в качестве человеческого фона и обнаруживает, что на самом деле довольно сложно доказать свою человечность в разговоре. С другой стороны, создателям ботов было легко пройти мимо, не потому, что они были самыми красноречивыми или умными собеседниками, а уклонялись от вопросов с нелогичными шутками, делали опечатки или в случае с ботом, который выиграл конкурс Тьюринга в 2014 году. , утверждающий, что он 13-летний украинский мальчик с плохим знанием английского языка.Ведь ошибаться свойственно человеку. Возможно, подобное будущее ждет и CAPTCHA, наиболее широко используемый тест Тьюринга в мире — новая гонка вооружений не для создания ботов, которые превосходят людей в маркировке изображений и разборе текста, а для тех, кто ошибается, пропускает кнопки, отвлекается. и переключать вкладки. «Я думаю, что люди понимают, что существует приложение для имитации обычного пользователя-человека… или глупых людей», — говорит Госемаюмдер.
и переключать вкладки. «Я думаю, что люди понимают, что существует приложение для имитации обычного пользователя-человека… или глупых людей», — говорит Госемаюмдер.
Тесты CAPTCHA могут сохраняться и в этом мире. В 2017 году Amazon получила патент на схему, включающую оптические иллюзии и логические головоломки, которые людям очень трудно расшифровать.Называется тест Тьюринга через провал, единственный способ пройти — дать неправильный ответ.
Фотогалерея роботов – Robot Foto Galéria
2009.
Это символический трансгуманистический проект.
Honda Asimo
» картинки Twendy-One
» картинки » сайт Tiro
» фотографии » сайт HRP-4C
» фото » сайт Экзоскелет HAL
» фото » сайт
KAWADA HRP-1S
» фотографии KAWADA HRP-2 Choromet
» фотографии KAWADA HRP-3P
» фотографии KAWADA HRP-3 Promet MK-II
» фото » сайт KAWADA HRP-4
» фото » сайт
HOAP Fujitsu 1
» картинки Fujitsu HOAP 2
» картинки Fujitsu HOAP 3
» картинки Sony SDR-4X
» картинки Wakamaru
» картинки » сайт
Роллин Джастин
» картинки Плен
» фото I-Sobot
» фотографии Тату ЖЕЛАНИЕ
» фото Робот сомелье
» картинки
Кондо KHR1
» фотографии » сайт Кондо KHR-2HV
» фотографии KY-100 Manoi
» фотографии Ri-Man
» картинки Aibo
» фотографии
ВауВи МистерЛичность
» картинки » сайт WowWee FemiSapien
» фотографии » сайт Джастин DLR
» картинки » сеть Robosapien RS Media
» картинки » сайт Лимбот Рексрота Humarm 580
» картинки
Robosapien Junior
» картинки Robosapien v2
» картинки » сайт Кубо Робот
» картинки Genibo
» фотографии Manoi PF01
» фотографии
iRobi
» картинки » сайт Робот-няня Юпитер
» фото Nettoro KT
» фотографии » сайт Nettoro RD6
» фото » сайт Ханури RD4
» фотографии
Ханури RD2
» фотографии » сайт Amio
» картинки » сайт TOPIO-3
» картинки » сайт TOPIO-2
» картинки » сайт TOPIO-1
» картинки » сайт
Айла
» фотографии » сайт Мобильный Ловкий Социальный Робот
» картинки Tiro
» фотографии » сайт Accel
» картинки » сайт Robot Soccer
» картинки » сайт
Nao
» фотографии » сайт Chroino
» картинки » сайт Ropid
» картинки » сайт FT (женский тип)
» картинки » сайт PR2 (Персональный робот 2)
» картинки » сайт
DRK8080
» картинки » сайт Хью
» картинки » сайт Hubo2
» фото » сайт Sony QURIO
» фото » сайт Айла
» картинки » сайт
Mahru R
» фотографии » сайт Mahru3
» картинки » сайт Mahru2
» картинки » сайт Ahra
» фотографии » сайт Hitec Robonova
» фотографии
Reem-h2
» картинки » сайт Reem-A
» картинки » сайт Reem-B
» картинки » сайт e-NUVO
» фотографии » сайт iGBoy
» картинки
Wabian 2R
» фотографии » сайт Гуманоид
» картинки » сайт Робина
» картинки » сайт Нагара-3
» картинки » сайт Kobian
» картинки » сайт Продолжение следует. ..
..
Продолжение следует…
ВАША поддержка поддерживает работу этого сайта. Спасибо!
(A TE támogatásodra is szükség van!)
Измененная фотография утверждает, что на ней изображен молодой Илон Маск с роботом
Илон Маск может стать триллионером. Вот что это значит.
Илон Маск может стать первым в мире триллионером. Вот что это значит.
Видео персонала, USA TODAY
Заявление: на изображении Илон Маск стоит рядом с роботом, который он построил в детстве , скучный или повторяющийся», — говорится в описании на сайте Tesla.
Пользователи социальных сетей, однако, распространяют изображение, утверждающее, что Маск действительно работал в этом ключе, начиная с самого детства.
“#ЭлонМаск (справа) в своей #технической школе в #ЮжнойАфрике с #Чаппи, его #роботом, которого он собирал”, – гласит подпись к посту, опубликованному в Instagram 27 октября.
Пользователь Instagram также утверждает, что робот, построенный Маском, был тем же, что появился в научно-фантастическом фильме-антиутопии 2015 года «Чаппи», который был снят в разных местах в Южной Африке, согласно Variety.
Пост набрал около 250 лайков за неделю.
Но утверждение ложное и фото изменено.
На оригинальной фотографии изображены три мальчика младшего школьного возраста, ни один из которых не Маск. Изображение было изменено в цифровом виде словацким художником, чтобы включить в него робота.
Проверка фактов: Изображение первого выхода в открытый космос без привязки изменено
USA TODAY обратились к пользователю социальной сети, который поделился публикацией, для комментария.
Фотография не Илона Маска или его робота
Исходная фотография была сделана между 1988 и 1991 годами и на ней изображены трое детей начальной школы, одним из которых был словацкий 3D-художник Генрих Кимерлинг.
На исходном изображении Кимерлинг стоит между двумя своими друзьями. Он заменил свою фотографию изображением робота в рамках дипломной работы, которую он сделал в 2007 году в Академии изящных искусств и дизайна в Братиславе, Словакия.
«Посередине, где сейчас находится робот, изначально был я», — сказал Кимерлинг USA TODAY по электронной почте. «Я делал больше таких фотомонтажей — везде заменял себя роботом».
«Я делал больше таких фотомонтажей — везде заменял себя роботом».
Изображение, созданное Кимерлингом, было загружено на ArtStation с описанием, которое гласит: “Я заменил себя на фотографиях моделью робота.
Кимерлинг также поделился изображением двух своих друзей и робота в своем аккаунте в Instagram 15 марта этого года.
Роботы-бармены – лучшие друзья человека в Испании
Роботизированные собаки помогают предотвратить распространение COVID-19 в Севилья, Испания.
Associated Press, USA TODAY
Пользователь Facebook, утверждающий, что Маск построил робота для фильма «Чаппи», тоже неправ. исполнил роль робота на съемочной площадке, затем команда аниматоров «нарисовала робота, созданного компьютером, поверх его выступления», — сказал Live Science продюсер визуальных эффектов Крис Харви.
Проверка фактов: Измененное изображение показывает изображение черепа «Дня мертвых», добавленное к изображению горы Фудзи в Японии. Но «Чаппи» не использовал захват движения. Вместо этого «аниматоры сделали это вручную», — также сказал Харви.
Но «Чаппи» не использовал захват движения. Вместо этого «аниматоры сделали это вручную», — также сказал Харви.
USA TODAY обратились к Маску за комментариями.
Наша оценка: Изменено
На основании нашего исследования мы оцениваем ИЗМЕНЕНО изображение, на котором утверждается, что Илон Маск стоит рядом с роботом, который он построил в детстве.На исходной фотографии изображены три мальчика начальной школы, ни один из которых не был Маском. Художник из Словакии в цифровой форме изменил фотографию, включив в нее робота.
Наши источники для проверки фактов:
- Генрих Кимерлинг, 5 ноября, обмен электронной почтой с USA TODAY не показывает молодого Илона Маска с роботом
- CNN, 13 июня, Илон Маск Краткие факты
- США СЕГОДНЯ, авг.20, Будущее уже здесь: встречайте Tesla Bot, робота-гуманоида Илона Маска
- Forbes, 10 марта 2015 г., The Tech Magic Behind the Movie Chappie
- ArtStation, по состоянию на 9 ноября, Friends created by Henrich Kimerling
- Variety, март 6 ноября 2015 г.
 , Нил Бломкамп привлекает внимание к Южной Африке с помощью фильма “Чаппи”
, Нил Бломкамп привлекает внимание к Южной Африке с помощью фильма “Чаппи” - Live Science, 5 марта 2015 г., “Чаппи”: насколько реалистичен искусственный интеллект в фильме?
- Тесла, по состоянию на 9 ноября, Искусственный интеллект и автопилот
Спасибо за поддержку нашей журналистики.Вы можете подписаться на наше печатное издание, приложение без рекламы или электронную копию газеты здесь.
Наша работа по проверке фактов частично поддерживается грантом Facebook.
Этот подводный робот используется для создания уникальных фотографий водных видов спорта
Необычный подводный робот-камера, который крепится на дне плавательных бассейнов, позволяет фотожурналистам делать фотографии водных видов спорта с обычно невозможных ракурсов.
В то время как уникальные объекты, как правило, создают самые интересные изображения, уникальные ракурсы также могут сделать обычные, необычные.Вот тут-то и появляется робот с подводной камерой от Telemetrics, который используется фотожурналистами Associated Press (AP) для захвата перспектив водных видов спорта, которые далеки от нормы.
Фото: Associated Press Фотографии ниже были сделаны во время Олимпийских игр в Токио прошлым летом. Система камер Telemetrics представляет собой полностью водонепроницаемую роботизированную систему, которая была разработана и изготовлена специально для бассейнов олимпийских размеров и мероприятий по водным видам спорта, как сообщает YM Cinema .
Британец Адам Пити плывет, чтобы выиграть золотую медаль в финальном заплыве на 100 метров брассом на летних Олимпийских играх 2020 года, понедельник, 26 июля 2021 года, в Токио. (AP Photo/David J. Phillip) Робот, в частности PT-CP-S5, привинчен к полу бассейна и подключен к интерфейсной системе с помощью одного кабеля Ethernet. Он поддерживает цифровые камеры со сменными объективами на глубине до шести метров (20 футов). Он имеет возможность подключения к Ethernet, выход постоянного тока для компактных цифровых камер, систему защиты от запотевания и то, что Telemetrics описывает как универсальный интерфейс для простого монтажа. Система имеет класс защиты IP 68 и предназначена для бассейнов, в которых используется хлор.
Система имеет класс защиты IP 68 и предназначена для бассейнов, в которых используется хлор.
Сборная Италии по спортивному плаванию соревнуется во время командных технических упражнений на летних Олимпийских играх 2020 года в пятницу, 6 августа 2021 года, в Токио, Япония. (AP Photo/Morry Gash) Фотографы AP могут полностью дистанционно управлять роботом, включая скорость затвора камеры, фокусировку и масштабирование. Фотографы также могут отслеживать прямую трансляцию с камеры с панели дистанционного управления, что позволяет им настроить камеру для получения идеального снимка.Один оператор может использовать панель Telemetrics RCCP-M для одновременного управления несколькими камерами и полного предварительного просмотра всех камер в реальном времени.
Брендон Смит из Австралии плывет за бронзовой медалью в индивидуальном заплыве на 400 метров комплексным плаванием на летних Олимпийских играх 2020 года, воскресенье, 25 июля 2021 года, в Токио. (AP Photo/David J. Phillip) Снятые фотографии немедленно передаются техническому специалисту у бассейна, который может быстро отправить их клиентам.
Система используется AP как минимум с 2019 года, но пресс-служба привезла шесть из них для использования во время Олимпийских игр в Токио в 2020 году и оснастила их либо Sony Alpha 1, либо Alpha 9 II.Следует отметить, что YM Cinema сообщает, что неназванный фотожурналист AP говорит, что, хотя организация использует системы с несколькими камерами, они выбирают исключительно камеры Sony, когда дело доходит до интеграции с робототехникой. Объяснений, почему это произошло, предоставлено не было.
Фото предоставлено Associated Press «Система проста в настройке и позволяет делать уникальные фотографии, которые были бы невозможны без этого решения», — говорит Майкл Куомо, вице-президент отдела телеметрии.«Эти игры — история, и есть только одна возможность запечатлеть действие. Наша робототехника предназначена для решения даже самых сложных задач. Мы рады видеть изображения, созданные в результате этого сотрудничества с Associated Press».
Фото предоставлено: Associated Press Хотя большинство изображений соревнований по плаванию по-прежнему снято над водой, необычная перспектива, которую может обеспечить робот для подводной камеры, имеет решающее значение для придания дополнительного контекста таким событиям, как синхронное плавание, где большая часть впечатляющей работы, спортсмены скрыты под поверхностью.
Авторы изображений: Фотографии предоставлены по отдельности и предоставлены Associated Press.
Синий робот | Твиттер Фото Мозаика
Опыт Photo Mosiac — это уникальное визуальное захватывающее приключение, которое чествует ваших поклонников и позволяет им оставаться на связи.
Отпразднуйте общение в социальных сетях
Мозаика из фотографий — лучший способ отпраздновать общение в социальных сетях.Наша технология улавливает все посты, связанные с комбинацией #хэштега и @ручки, и создает интерактивную фотомозаику. Каждый участвующий пользователь может найти себя в мозаике. Все предоставленные изображения можно модерировать, прежде чем они будут включены в мозаику.
Призы также можно скрыть в фотомозаике, чтобы увеличить время, затрачиваемое на навигацию.
Drive & Measure Twitter Conversations
Фотомозаика может отслеживать разговоры в Twitter.Разговор представлен любым хэштегом # и @handle, обозначающим тему. Наша мозаичная технология может обрабатывать до 100 000 уникальных изображений, но также может создавать успешную мозаику всего из 200 изображений. Исследуй и взаимодействуй
Пользователи тратят в среднем 2 минуты на изучение нашей фотомозаики, и каждое изображение кликабельно, запуская исходный пост, содержащий это уникальное изображение. Кликабельные сообщения направляют пользователя обратно в Twitter при повторном нажатии, повышая вовлеченность после того, как разговор уже развернулся. Модерация с помощью искусственного интеллекта
Все изображения автоматически модерируются на наличие ненормативной лексики и уместности с помощью нашего механизма искусственного интеллекта. После этого происходит пользовательская модерация для обеспечения полного соответствия.
После этого происходит пользовательская модерация для обеспечения полного соответствия. Создание уникальных изображений из любого текста
Robohash — это простой веб-сервис, который позволяет легко создавать уникальные изображения роботов/инопланетян/монстров для любого текста.
Введите любой текст, такой как IP-адрес, адрес электронной почты, имя файла, идентификатор пользователя и т. д., и получите красивое изображение для своего сайта.
С сотнями миллионов вариаций Robohash является одним из ведущих инструментов хеширования на основе роботов в Интернете.
https://robohash.org/104.236.21.134.png
Насколько это круто?
Вон тот парень слева от тебя? Он был специально сгенерирован из вашего IP-адреса Только для вас.
Попробуйте на своем телефоне, и держу пари, вы получите кого-то другого!
Продолжайте прокручивать вниз, чтобы увидеть еще несколько недавно собранных RoboHash.
Вот пять роботов, сгенерированных случайным образом, специально для вас!
Добавляя ?set=set2 к URL-адресам нашего изображения, мы можем генерировать множество случайных монстров. Вот 5, которые мы выбрали для вас.
Добавляя ?set=set3 к нашим URL-адресам, мы возвращаемся к robots. Новые, учтивые, бестелесные головы. Это сексуально. Как робот.
Добавляя ?set=set4 к нашим URL-адресам, мы можем выращивать красивых котят с помощью гидропоники.
Роботы нужны всем!
РобоХэш.org здесь, потому что роботы забавные, и потому что мне все равно нужен алгоритм/арт для супер-крутого нового форума, над которым я работаю. Если вы используете определенный набор или их список, например “?sets=1,3” , он, вероятно, останется таким же, как сейчас. Если вы используете “set=any”, он будет включать любые новые наборы, которые я добавлю, поэтому существующие хэши могут измениться.
Вы должны написать мне по электронной почте –
[электронная почта защищена]
Если пропускная способность станет сумасшедшей, я могу добавить баннер [Robohash. org] внизу изображения. Но это было бы супервкусно.
org] внизу изображения. Но это было бы супервкусно.
Дополнительные занятия по робототехнике.
Для тех, кто склонен, есть несколько продвинутых методов, которые были добавлены с течением времени.
Для энтузиастов Gravatar вы можете попросить Robohash использовать Gravatar, если он доступен.
Поместите либо адрес электронной почты, либо хешированную версию в изображение, где обычно идет строка —
Например: https://robohash.org/[email protected]?gravatar=yes
или https://robohash.org /620050a4db5104bae758cd75171d64ca?gravatar=хэш
Мы также настроили наших роботов на прием команд либо через параметры, либо через каталоги —
Например, https://robohash.org/set_set3/bgset_bg1/3.14159?size=500×500
Наконец-то доступны чертежи для создания собственного робота.
фабрика.
Между прочим. Для тех, кто боится робокалипсиса, вы также можете создавать людей-техников для присмотра за армией роботов, добавляя ?set=set5 к нашим URL-адресам.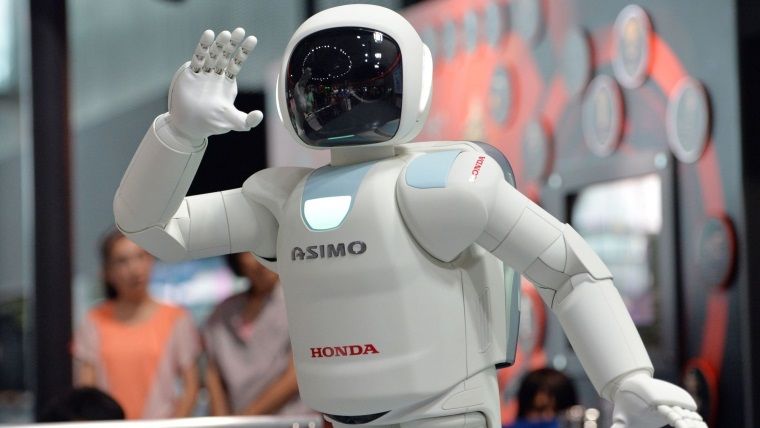
Все чаще за простой, немного слишком милой кнопкой с надписью «Я не робот» следовали требования доказать это — выбирая все светофоры, пешеходные переходы и витрины в сетке изображений. Вскоре светофоры утонули в далекой листве, пешеходные переходы искривились и оказались наполовину за углом, вывески на витринах расплылись и написаны на корейском языке. Есть что-то особенно удручающее в том, что вас просят опознать пожарный гидрант и вы пытаетесь с этим справиться. Все эти навесы, которые могут быть витринами, а могут и не быть? Они являются конечным пунктом в гонке вооружений человечества с машинами. В интригующем варианте исследователи в 2010 году предложили использовать CAPTCHA для индексации древних петроглифов, поскольку компьютеры не очень хорошо расшифровывают жесты оленей, нацарапанные на стенах пещеры. Как только вы избавитесь от всех этих вещей, чтобы сделать тест, который может пройти любой человек, без предварительной подготовки или долгих раздумий, вы останетесь с грубыми задачами, такими как обработка изображений, а это именно то, чем должен быть сделанный на заказ ИИ. хорош в. Игровые CAPTCHA, видео CAPTCHA, любой тест CAPTCHA, который вы придумаете, в конечном итоге будет взломан, говорит Шуман Гоземаджумдер, который ранее работал в Google над борьбой с мошенничеством с кликами, а затем стал техническим директором компании Shape Security, занимающейся обнаружением ботов. Вместо тестов он предпочитает так называемую «непрерывную аутентификацию», по существу наблюдающую за поведением пользователя и ищущую признаки автоматизации. «Настоящие люди не очень хорошо контролируют свои собственные двигательные функции, поэтому они не могут перемещать мышь одним и тем же образом более одного раза в течение нескольких взаимодействий, даже если очень стараются», — говорит Госемаюмдер.В то время как бот будет взаимодействовать со страницей, не двигая мышью, или очень точно перемещая мышь, действия человека обладают «энтропией», которую трудно подделать, говорит Госемаюмдер. По словам Сай Хормаи, менеджера по продукту в команде CAPTCHA, Google не сказал бы, какие факторы влияют на этот показатель, за исключением того, что Google наблюдает за тем, как выглядит группа «хорошего трафика» на сайте, и использует это для обнаружения « плохой трафик». Исследователи безопасности говорят, что это, вероятно, сочетание файлов cookie, атрибутов браузера, шаблонов трафика и других факторов. Одним из недостатков новой модели обнаружения ботов является то, что она может сделать навигацию в Интернете, сводя к минимуму слежку, раздражающим занятием, поскольку такие вещи, как VPN и расширения для защиты от отслеживания, могут пометить вас как подозрительных и брошенных вызовов. Маленфант говорит, что через пять-десять лет вызовы CAPTCHA, скорее всего, вообще не будут жизнеспособными. Вместо этого большая часть Интернета будет иметь постоянный секретный тест Тьюринга, работающий в фоновом режиме. и переключать вкладки. «Я думаю, что люди понимают, что существует приложение для имитации обычного пользователя-человека… или глупых людей», — говорит Госемаюмдер.Фотогалерея роботов – Robot Foto Galéria
2009.
Это символический трансгуманистический проект.
» картинки
» картинки » сайт
» фотографии » сайт
» фото » сайт
» фото » сайт
» фотографии
» фотографии
» фотографии
» фото » сайт
» фото » сайт
» картинки
» картинки
» картинки
» картинки
» картинки » сайт
» картинки
» фото
» фотографии
» фото
» картинки
» фотографии » сайт
» фотографии
» фотографии
» картинки
» фотографии
» картинки » сайт
» фотографии » сайт
» картинки » сеть
» картинки » сайт
» картинки
» картинки
» картинки » сайт
» картинки
» фотографии
» фотографии
» картинки » сайт
» фото
» фотографии » сайт
» фото » сайт
» фотографии
» фотографии » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» фотографии » сайт
» картинки
» фотографии » сайт
» картинки » сайт
» картинки » сайт
» фотографии » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» фото » сайт
» фото » сайт
» картинки » сайт
» фотографии » сайт
» картинки » сайт
» картинки » сайт
» фотографии » сайт
» фотографии
» картинки » сайт
» картинки » сайт
» картинки » сайт
» фотографии » сайт
» картинки
» фотографии » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
» картинки » сайт
Продолжение следует. ..
Продолжение следует…
ВАША поддержка поддерживает работу этого сайта. Спасибо!
(A TE támogatásodra is szükség van!)
«Я делал больше таких фотомонтажей — везде заменял себя роботом». Но «Чаппи» не использовал захват движения. Вместо этого «аниматоры сделали это вручную», — также сказал Харви. , Нил Бломкамп привлекает внимание к Южной Африке с помощью фильма “Чаппи” Система имеет класс защиты IP 68 и предназначена для бассейнов, в которых используется хлор.Введите любой текст, такой как IP-адрес, адрес электронной почты, имя файла, идентификатор пользователя и т. д., и получите красивое изображение для своего сайта.
https://robohash.org/104.236.21.134.png
org] внизу изображения. Но это было бы супервкусно.Поместите либо адрес электронной почты, либо хешированную версию в изображение, где обычно идет строка —
или https://robohash.org /620050a4db5104bae758cd75171d64ca?gravatar=хэш
Например, https://robohash.org/set_set3/bgset_bg1/3.14159?size=500×500