
Моделирование динамики гироскопа | Блог COMSOL
Недавно, впервые столкнувшись с уравнениями движения вращающихся тел, один из моих сыновей вернулся домой с множеством интересных вопросов. Его вопросы вызвали воспоминание о том, как много лет назад, я испытал такое же чувство растерянности при изучении механики. В сегодняшнем топике, я представлю две модели COMSOL Multiphysics — гироскопа и волчка — иллюстрирующих примечательные свойства вращающихся тел.
Что такое гироскоп?
Гироскоп — термин, придуманный Леоном Фуко в середине 19-го века — был признан как очень полезный инструмент в области науки и техники приблизительно двести лет назад. Его предшественник, волчок, известен, начиная с древних времен, и используется как игрушка для азартных игр и как предмет с магическими и мистическими свойствами.
Как рабочий инструмент, гироскоп ценится за свою точность при измерении и сохранении ориентации. Такие свойства способствуют его использованию в самолетах, космических кораблях и подводных лодках, а также в датчиках инерциальных систем навигации.
Копия первого гироскопа.
Классический гироскоп основан на законе сохранения момента импульса. Тело во время вращения стремится сохранить ориентацию своей оси в отсутствие моментов внешних (сил). Устойчивость к изменению ориентации при возмущении (внешнем воздействии) зависит от момента импульса, то есть произведению угловой скорости и момента инерции (тела). Если момент (сил) воздействующих на ротор не параллелен оси вращения, эффект может быть весьма неожиданным.
Примечание: В настоящее время существует несколько типов устройств, служащих той же цели, что и классический гироскоп, но они основаны на отличных физических свойствах. Последние достижения в физике и микросистемной технике сделали это возможным.
Как показано на приведенной ниже схеме, гироскоп состоит из диска, вращающегося с большой угловой скоростью вокруг своей оси. Ось соединяется с внутренним кольцом, называемым карданной подвеской (gimbal).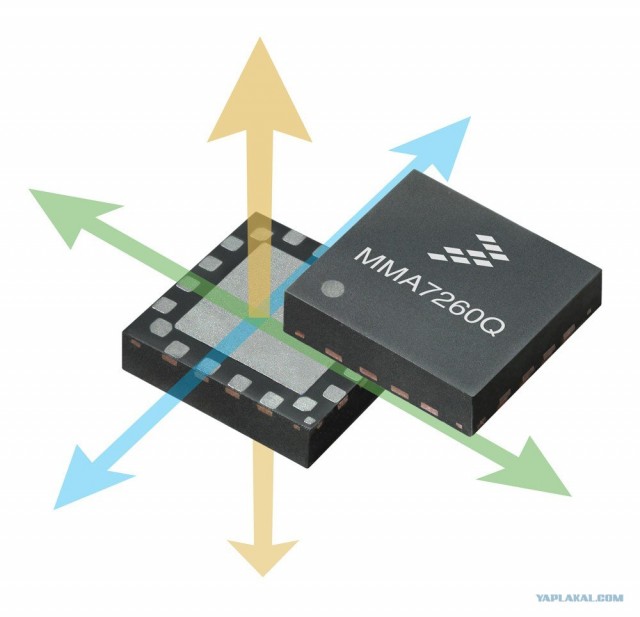 Внутренняя подвеска прикрепляется к внешней карданной подвеске другой парой шарниров. У этих шарниров имеется ось, расположенная под прямым углом к вращающемуся валу. Третья пара шарниров прикрепляет внешнюю карданную подвеску к рамке. В результате ротор обладает тремя вращательными степенями свободы, по одной на каждую ось. Заметим, что рамка крепится к внешнему окружению (например, к сосуду).
Внутренняя подвеска прикрепляется к внешней карданной подвеске другой парой шарниров. У этих шарниров имеется ось, расположенная под прямым углом к вращающемуся валу. Третья пара шарниров прикрепляет внешнюю карданную подвеску к рамке. В результате ротор обладает тремя вращательными степенями свободы, по одной на каждую ось. Заметим, что рамка крепится к внешнему окружению (например, к сосуду).
Если рамка вращается вокруг произвольной оси, ось ротора стремится сохранить свое направление. При этом, обе подвески вращаются.
Схема классического гироскопа.
Моделирование гироскопических эффектов в COMSOL Multiphysics
Используя модуль Динамики многотельных систем в среде COMSOL Multiphysics, мы можем смоделировать механические свойства гироскопа. Наша учебная модель «Моделирование гироскопических эффектов» ориентирована на исследования такого рода. Пример, который обсуждается далее, на самом деле включает в себя две модели: гироскоп и волчок.
Модель гироскопа
Начнем с нашей модели гироскопа. Геометрия модели включает в себя четыре твердых тела: ротор, два карданова подвеса и рамка. Ротор изготавливается из стали, а остальные части из алюминия. Из-за такого выбора материалов, момент инерции ротора больше по сравнению с поддерживающей конструкцией. Рамке задано установленное вращение вокруг оси, ориентированной под углом 90° от оси ротора и 45° от двух кардановых подвесов винтовой оси. Вращение рамки задано гармоническим с величиной 2 радиана и частотой 2 Гц. Каждый из винтов смоделирован как шарнир.
Геометрия модели включает в себя четыре твердых тела: ротор, два карданова подвеса и рамка. Ротор изготавливается из стали, а остальные части из алюминия. Из-за такого выбора материалов, момент инерции ротора больше по сравнению с поддерживающей конструкцией. Рамке задано установленное вращение вокруг оси, ориентированной под углом 90° от оси ротора и 45° от двух кардановых подвесов винтовой оси. Вращение рамки задано гармоническим с величиной 2 радиана и частотой 2 Гц. Каждый из винтов смоделирован как шарнир.
Чтобы проиллюстрировать эффект вращения ротора на его ориентацию в ходе анализа рассмотрены две различные ситуации. В первом случае, ротор не вращается. Во втором случае, начальное значение угловой скорости ротора составляет 350 рад/с (3342 об/мин).
Первая анимация ниже демонстрирует, что если ротор не вращается, то он вынужден изменять свою ориентацию. Сила тяжести не учитывается в задаче, и кинематически, для ротора имеется возможность сохранять свою ориентацию, так что изменение в ориентации ротора вызывает динамика системы твердых тел. Во второй анимации, видно, что из-за своего вращения, ротору фактически удается сохранять свою ориентацию.
Во второй анимации, видно, что из-за своего вращения, ротору фактически удается сохранять свою ориентацию.
Ориентация ротора при вынужденном вращении рамки, с некрутящимся ротором.
Ориентация ротора при вынужденном вращении рамки, с крутящимся ротором.
На приведенном ниже графике, показано различие в стабильности угла наклона оси ротора. Угловой погрешности порядка 1°, возникающей в случае вращения (с крутящимся ротором), может оказаться все еще недостаточно для использования в высокоточных приборах. Однако изменения в конструкции могут уменьшить это отклонение. В нашем примере, скорость вращения рамки достаточно высока. Рамка поворачивается приблизительно на 115° и обратно, за 0,25 секунды, которые охватываются процессом моделирования. Для улучшения стабильности ориентации оси при таком внешнем воздействии, требуется либо повышение скорости вращения ротора или его утяжеление.
Сравнение наклона оси ротора с вращением и без.
Модель Волчка
Теперь переключим наше внимание на модель волчка. Здесь мы используем только отдельное твердое тело — ротор из предыдущего примера. Ось ротора первоначально ориентирована на 20° от вертикальной оси, а гравитационная нагрузка увеличена. Затем, ротору сообщается начальная угловая скорость вокруг собственной оси. Вместе с силой реакции опоры, сила тяжести создает момент в плоскости вращения на оси ротора и вертикальной оси.
Здесь мы используем только отдельное твердое тело — ротор из предыдущего примера. Ось ротора первоначально ориентирована на 20° от вертикальной оси, а гравитационная нагрузка увеличена. Затем, ротору сообщается начальная угловая скорость вокруг собственной оси. Вместе с силой реакции опоры, сила тяжести создает момент в плоскости вращения на оси ротора и вертикальной оси.
Пара сил, действующих на волчок.
Этот момент сил вызывает угловое ускорение в направлении перпендикулярном плоскости, и волчок начинает изменять свою ориентацию. Это изменение в ориентации волчка, совместно с вращением вокруг собственной оси, вызывает гироскопический момент, действующий на волчок. Под воздействием гироскопического момента, верхушка волчка медленно описывает круговую траекторию. Такое вращение оси ротора называется прецессией. График ниже иллюстрирует траекторию движения вершины оси.
Траектория движения вершины волчка.
Как можно заметить, на широкую круговую траекторию накладываются меньшие циклические биения — движения, известного как нутация. Нутация зависит от начальных условий. Поскольку исследование волчка начинается только с закручивания вокруг оси ротора и без скорости прецессии, то начальные условия не совместимы с чисто прецессионным движением. В реальной физической системе, амплитуда нутации затухает со временем.
Заключение
При решении задач данного типа, важно правильно выбрать временной шаг для анализа. Как правило, он не должен превышать значения, соответствующего углу вращения порядка нескольких градусов за один временной шаг. В приведенных выше примерах, для временного шага используется значение 0,1 мс. Это соответствует повороту ротора вокруг своей оси на угол приблизительно 2° при каждом шаге.
Вы можете скачать учебную модель, представленную здесь, из нашей Галереи Приложений. Если вы заинтересованы в приобретении знаний о другой технологии для проектирования МЭМС гироскопов, мы рекомендуем вам также ознакомиться с нашей учебной моделью Пьезоэлектрический гиродатчик угловой скорости (Piezoelectric Rate Gyroscope tutorial model).
Принцип работы гироскопа: описание, характеристики
Содержание
Компания Robert Bosch является известным производителем MEMS гироскопов для автомобильных электронных систем курсовой стабилизации. На рынке потребительской электроники гироскопы используются в системах навигации, стабилизации изображения и игровых приставках.
Гироскопы, наряду с компасами, широко применяются для решения задач навигации. Принцип работы гироскопов основан на эффекте ускорения Кориолиса. Устройства измеряют угловую скорость вращающихся объектов.
- Малый дрейф параметров
- Низкий уровень шума
- Компактный размер
- Быстродействие
- Системы навигации
- Обеспечение устойчивости и отсутствия вибраций неподвижного оборудования
- Автомобильная электроника: бортовые записывающие устройства, счетчики пути, противоугонные системы, беспилотные средства передвижения
- Спутниковые антенны
- Офисная техника
- Бытовая техника (вращение диска микроволновой печи)
- Видеокамеры
- Системы экстренного оповещения об опасности
- Сборочное оборудование
Компания Robert Bosch является известным производителем MEMS гироскопов для автомобильных электронных систем курсовой стабилизации. На рынке потребительской электроники гироскопы используются в системах навигации, стабилизации изображения и игровых приставках.
На рынке потребительской электроники гироскопы используются в системах навигации, стабилизации изображения и игровых приставках.
Благодаря сохранению углового момента, угловая скорость в плоскости кристалла вызывает ударные ускорения в полимерной массе, которые находятся уже в другой плоскости. Встроенные электроды определяют емкостные параметры этих внеплоскостных ускорений.
Датчик крена SMG061 с аналоговым выходом
Чем больше масса ротора и скорость его вращения, тем выше способность такого гироскопа сохранять заданное положение главной оси. Так, установка успокоения качки для 10-метровой лодки в сборе весит около 350 кг и имеет ротор, вращающийся со скоростью от 6000 до 10 000 об/мин.
Для успокоения морской качки, передвижении на гироскутере и ориентации картинки в телефоне служат совершенно разные устройства с общим названием — гироскопы. Подборка видеороликов поможет вам разобраться в принципах работы современных систем стабилизации.
Механические гироскопы
Вращение придает объекту стабильность в пространстве, этот принцип используют детский волчок, тарелочка-фрисби и пуля нарезного оружия. Любой из этих предметов можно назвать гироскопом, противодействующим отклонению от оси вращения.
Если вращающийся объект будет закреплен на оси с несколькими степенями свободы, то получится роторный гироскоп. Как только ротор будет раскручен, его ось приобретает устойчивость в пространстве и старается сохранить ориентацию, заданную в начальный момент.
- Карибский вулкан начал извергать лаву из вновь сформированного вулканического купола
- Транспортная компания показала, как перевозят огромные лопасти ветрогенераторов
- Приложение «Моя Планета» представляет новый выпуск проекта «Царство грибов»
Чем больше масса ротора и скорость его вращения, тем выше способность такого гироскопа сохранять заданное положение главной оси. Так, установка успокоения качки для 10-метровой лодки в сборе весит около 350 кг и имеет ротор, вращающийся со скоростью от 6000 до 10 000 об/мин.
Такие стабилизаторы требуют очень высокой точности изготовления, потребляют значительное количество энергии и издают шум при работе. Все это сказывается на цене и ограничивает их применение в быту. Зато они незаменимы в случаях, когда стабилизируемый объект не имеет возможности опираться на какую-либо поверхность — в воде, воздухе и космическом пространстве.
Электромеханические гироскопы
Моноколеса, стабилизаторы для камер и даже смартфоны также оснащены гироскопами, но их системы работают по совершенно иному принципу. В их основе лежат микроэлектромеханические системы — это микросхемы со встроенным датчиком инерции, которые способны переводить его механические перемещения в электрические импульсы. Общий принцип действия можно понять из следующего ролика.
Управляющие системы по показаниям таких датчиков вычисляют текущее положение объекта и стабилизируют его при помощи электромоторов. Принцип работы хорошо виден на примере стабилизатора для видеосъемки.
Датчики, работающие по принципу гироскопа, являются неотъемлемым оборудованием в авиации. Два гироскопа устанавливаются на крыльях самолета, благодаря чему можно получать информацию о его повороте вокруг вертикальной оси. Распространенные сейчас беспилотники имеют три гироскопа, без которых управление летательным аппаратом и его точное балансирование было бы невозможным.
В упрощенном варианте изложения принципа работы классического устройства его можно сравнить с обыкновенным детским волчком. Центральный элемент прибора вращается по своей вертикальной оси, при этом он фиксируется в рамке. Последняя способна поворачиваться только по горизонтальной оси. Она закрепляется в еще одной рамке, которая может оборачиваться вокруг третьей оси. Такая конструкция прибора позволяют его центральному элементу всегда находиться в вертикальном положении, вне зависимости от того как будет поворачиваться корпус гироскопа.
 Разновидности гироскопов по принципу действия
Разновидности гироскопов по принципу действияКонструкцию гироскопа принято разделять на две группы по принципу действия:
- Механические.
- Оптические.
Первыми появились механические приборы, от которых и пошло изучение гироскопического эффекта. Однако сфера использования таких устройств ограничена и не позволяет их интегрировать в современную технику, которая нуждается в ориентире для определения положения в пространстве. Вследствие этого появилась оптическая группа гироскопов.
МеханическиеРоторные устройства не используются как датчики, а являются стабилизирующим элементом для различных конструкций и механизмов. По данному принципу изготовляется спортивный кистевой гироскопический тренажер. Такой прибор представляет собой шар, внутри которого располагается гироскопический элемент со своей осью вращения.
ОптическиеСфера использования гироскоповГироскоп широко используется в:
- Авиации.

- Автомобилестроении.
- Мобильных устройствах и прочая подобная техника.
- Системах стабилизации видеокамер.
- Навигации.
Датчики, работающие по принципу гироскопа, являются неотъемлемым оборудованием в авиации. Два гироскопа устанавливаются на крыльях самолета, благодаря чему можно получать информацию о его повороте вокруг вертикальной оси. Распространенные сейчас беспилотники имеют три гироскопа, без которых управление летательным аппаратом и его точное балансирование было бы невозможным.
Гироскоп является не только полезным, но и интересным устройством, принцип работы которого был внедрен в производство нескольких видов детских игрушек. Примером этого является йо-йо, волчок, спиннер, кистевой гироскопический тренажер. В данном случае ценится качество устройства удерживаться в определенном положении благодаря вращению по главной оси. Что касается свойства гироскопа выступать в качестве датчика, то оно применяется при изготовлении вертолетов на радиоуправлении, квадрокоптеров.
В мобильной технике гироскоп применяется благодаря его свойству реагировать на изменение углов ориентации тела. Прибор выступает в качестве датчика, позволяющего определить, что мобильный телефон или планшет был повернут в ту или иную сторону. Наличие устройства позволяет получить информацию об изменении положения тела в 3 плоскостях. Внедренные в гаджеты гироскопы внешне напоминают миниатюрную микросхему.
Благодаря присутствию гироскопа в мобильном телефоне, в том удалось реализовать функцию управления встряхиванием. Особенно полезным датчик является для реализации управления в играх, в частности гонках. При повороте экрана девайса осуществляется управление автотранспортом без необходимости нажатия на кнопки.
Отличие между гироскопом и акселерометромВесьма похожим устройством на гироскоп является акселерометр. Последний позволяет определять повороты тела относительно его оси. При этом функционал гороскопа гораздо обширнее.
При этом функционал гороскопа гораздо обширнее.
Он позволяет:
- Определить перемещение в пространстве.
- Указывать стороны света как компас.
- Дает информацию для расчета скорости движения.
Наличие гироскопа позволяет решать те задачи, которые мог бы выполнять акселерометр. При этом использование акселерометра никогда не позволит сделать все то, что возможно с помощью гироскопа. Несмотря на схожесть датчиков, они часто используются в паре, особенно в мобильной технике, смарт-часах, планшетах и т.д. Работая вместе, они позволяют значительно быстрее получать различную информацию по перемещению устройств, что увеличивает скорость ее обработки. Это важно для мобильных игр, квадрокоптеров, гироскутеров.
— В оружии. Пуля при стрельбе закручивается, что придает ей гораздо большую устойчивость, это сильно повышает точность стрельбы.
Игорь Гладкобородов
Если волчок раскрутить, то он не упадет, пока не остановится.
 Это происходит благодаря закону сохранения момента импульса. Не понятное объяснение.
Это происходит благодаря закону сохранения момента импульса. Не понятное объяснение.Когда пытаешься повернуть крутящееся тело, возникает сила, которая действует перпендикулярно силе, которую прикладываешь к нему. На втором рисунке видно, что, когда части колеса, обозначенные точками A и B, поворачиваются на 90 градусов, они стремятся повернуть колесо в плоскости экрана по часовой стрелке. Это называется прецессия. Из-за этой силы ось волчка всегда ходит по кругу, если запустить его не ровно, very non-intuitive.
Помечтаем о лете, представим себе, что мы едем на велике. Переднее колесо нам хорошо видно, почти сверху. Если мы пытаемся повернуть, например, налево, то мы прилагаем усилие к оси колеса. Тем частям колеса, которые в данный момент впереди, передается импульс, направленный влево, а задним частям колеса идет импульс вправо.
Но, поскольку мы быстро едем, и колесо крутится, то та часть, которая только что была впереди, оказывается сзади, и небольшой импульс, который мы успели придать этой части колеса работает уже в противоположном направлении, и поворачивает его в обратную сторону.
Получается, что из-за вращения колеса мы сами себе мешаем повернуть его. То есть, то усилие, которое мы прилагаем, чтобы повернуть колесо, нам же возвращается через колеса.
Любой вращающийся предмет можно назвать гироскопом. Он противодействует отклонению оси вращения, а люди этим активно пользуются:
В контроллерах современных игровых консолей и в iPhone 4 есть гироскопы, но они устроены по совсем другому принципу.
— В приборах навигации в самолетах и космических аппаратах. Хорошо сбалансированный гироскоп на специальных шарнирах, установленный на самолет, всегда сохраняет свое положение в пространстве, никакие фигуры высшего пилотажа не собьют его. Это позволяет приборам самолета всегда знать, где низ.
— В оружии. Пуля при стрельбе закручивается, что придает ей гораздо большую устойчивость, это сильно повышает точность стрельбы.
— Колеса велосипеда или мотоцикла работают как гироскопы, и это не дает ездоку упасть. На велосипеде сложнее ехать медленно, чем быстро, потому что на большой скорости колеса крутятся быстрее и делают его устойчивее.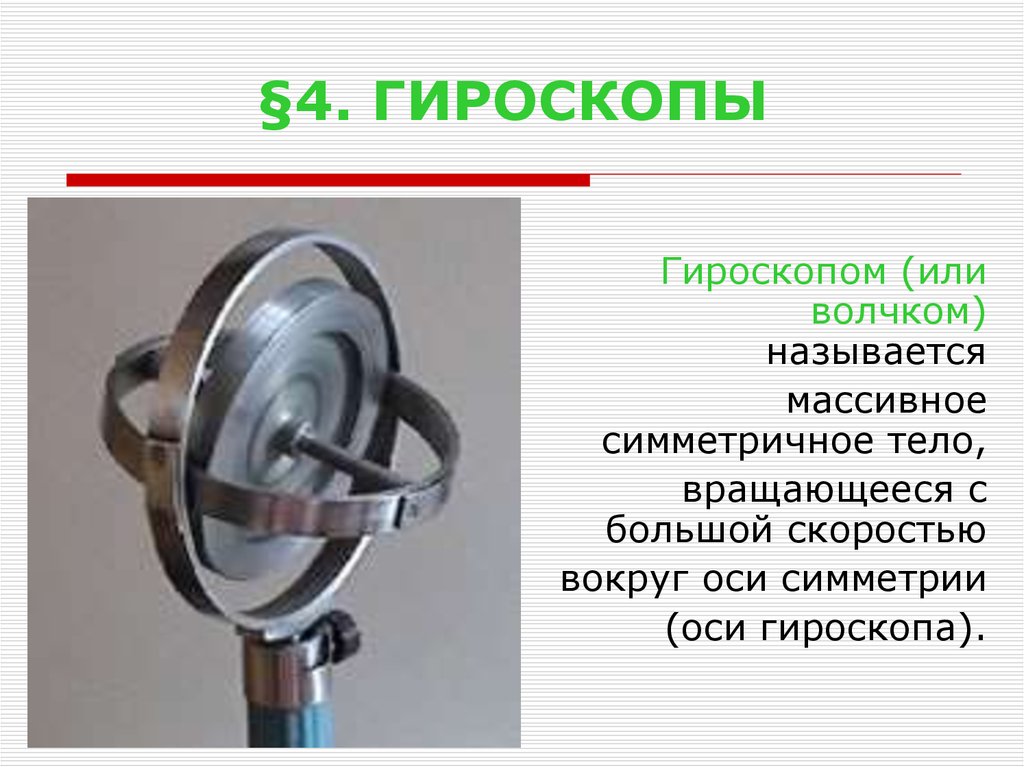
— Есть много игрушек, где главная деталь — гироскоп: всевозможные волчки и , с которыми можно делать вот такие трюки:
Принцип действия системы гироскопа
Одноосевой МЭМС-датчик угловой скорости (гироскоп) с вибрирующим кремниевым кольцом
Данный кремниевый цифровой гироскоп разработан с учетом требований к низкой стоимости изделия и экономичному энергопотреблению для систем навигации и наведения нового поколения. Он способен измерять угловую скорость до ± 1,0 є/с и имеет два режима вывода: аналоговый сигнал напряжения, линейно-пропорциональный угловой скорости, и цифровой по протоколу SPI®.
Режима вывода – аналоговый или цифровой – выбирается пользователем при подключении датчика к какой-либо системной плате. Главной отличительной особенностью гироскопа является применение технологии сбалансированного вибрирующего кольца в качестве датчика угловой скорости. Именно она обеспечивает надежную работу и точное измерение скорости вращения даже в условиях сильной вибрации.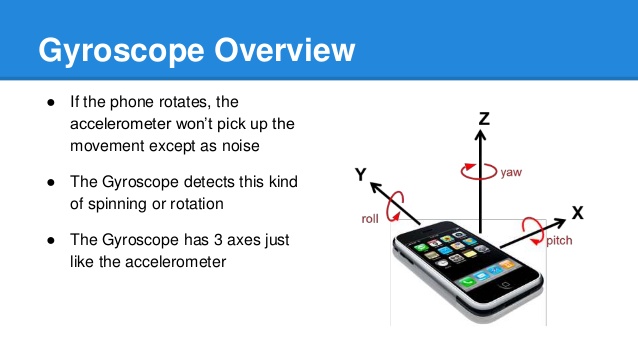
Как правило, подобные гироскопы выпускаются в герметичных керамических LCC корпусах которые можно устанавливать на системные платы. Датчик состоит из пяти основных компонентов:
— кремниевый кольцевой МЭМС-сенсор (MEMS-ring),
— основание из кремния (Pedestal),
— интегральная микросхема гироскопа (ASIC),
— корпус (Package Base),
— крышка (Lid).
Кремниевый кольцевой МЭМС-сенсор, микросхема и кремниевое основание размещены в герметичной части корпуса с вакуумом, частично заполненным азотом. Это дает серьезные преимущества перед сенсорами, которые поставляются в пластиковых корпусах, которые имеют определенные ограничения чувствительности в зависимости от уровня влажности.
Кремниевый кольцевой МЭМС-сенсор
Диаметр кремниевого МЭМС-кольца равен 3 мм., толщина – 65 мкм. Его изготавливают методом глубокого реактивного ионного травления объемных кремниевых структур на 5” пластинах. Кольцо поддерживается в свободном пространстве восемью парами симметричных спиц, которые исходят из твердого концентратора диаметром 1 мм. в центре кольца.
в центре кольца.
Концентратор в центре кольца сенсора установлен на цилиндрическом кремниевом основании диаметром 1 мм., которое связано с кольцом и ASIC с помощью эпоксидной смолы. Микросхема гироскопа имеет габариты 3х3 мм и изготовлена по технологии 0,35 мкм КМОП. ASIC и МЭМС-сенсор (кольцо) разделены физически, но соединены электрической цепью через золотые проводки. В связи с этим в подобной схеме отсутствуют внутренние каналы, что позволяет уменьшить шумовую нагрузку и получить отличные электромагнитные свойства.
Принцип действия системы гироскопа
Описываемые гироскопы обычно являются твердотельными устройствами и не имеют движущихся частей за исключением сенсорного кольца, которое имеет возможность отклоняться. Оно показывает величину и направление угловой скорости за счет использования эффекта «силы Кориолиса». Во время вращения гироскопа силы Кориолиса действуют на кремниевое кольцо, являясь причиной радиального движения по периметру кольца.
На рисунках 3 и 4 продемонстрирована структура кремниевого кольца сенсора, показывающая приводы первичного движения «PD» (одна пара), первичные снимающие преобразователи «PPO» (одна пара) и вторичные снимающие преобразователи «SPO» (две пары).
На рисунке 5 схематично показано кольцо, при этом спицы, приводы и преобразователи удалены для ясности. В данном случае гироскоп выключен, кольцо круглое.
Рис. 7 Режимы работы сенсорного кольца при вращающемся гироскопе
Схема управления всем гироскопом расположена в ASIC.
Рис. 8 Блоковая диаграмма функционирования ASIC-сенсора
Рис. 9 Внешний вид ASIC-гироскопа
Тема раздела Аппаратура радиоуправления в категории Cамолёты — Общий; Как они устроены что является датчиком а то я по школе помню что там чтото крутится должно.
Как они устроены что является датчиком а то я по школе помню что там чтото крутится должно?
Упрощенно он состоит из бруска пьезоматериала, который электронная схема вводит в резонансные колебания изгибного характера. С пластин бруска, параллельных плоскости колебаний снимают сигнал при появлении прецессии. Электронная схема выделяет из него сигнал, пропорциональный угловой скорости перемещения оси колебаний.
Сейчас разработана новая технология без пьезоэлементов. Футаба называет ее SMM. Там в микросхеме методом фотолитографии формируется микробалка, работающая в режиме изгибных колебаний.
Полностью устранен температурный дрейф датчика и значительно увеличена стойкость к ударам и вибрациям. Датчик разрабатывался изначально для систем головок наведения «умных» высокоточных боеприпасов.
Кстати, из элементарной физики следует, что один датчик способен выявлять угловую скорость только по одной из 3 осей. Так что для стабилизации по трем осям нужно 3 датчика.
Ну а теперь мы поговорим о каждом устройстве в отдельности.
Акселерометры
Nokia 5500 — первый телефон с акселерометром
Акселерометры также имеются в различных контроллерах игровых консолей, будь то обыкновенный геймпад или несколько иное устройство, например, контроллер движения PlayStation Move. Кстати, акселерометр используется и в анонсированном на днях шлеме виртуальной реальности Sony Project Morpheus.
Особое значение имеет акселерометр, применяемый в ноутбуках, а точнее, в их жестких дисках. Всем известно, что винчестеры — устройства довольно хрупкие, и в случае с лэптопами вероятность их повреждения возрастает в разы. Так, при падении ноутбука акселерометр фиксирует резкое изменение ускорения и отдает команду на парковку головки жесткого диска, предотвращая и повреждение устройства, и потерю данных.
Акселерометр InvenSense MPU-6500
По схожему принципу акселерометр влияет на работу автомобильного видеорегистратора. При резком ускорении, торможении и перестроении транспортного средства видеозапись помечается специальным маркером, который защищает ее от стирания и перезаписи, что значительно облегчает дальнейшие разборы дорожно-транспортных происшествий.
Краш-тест автомобиля Opel Vectra. В 90-е годы подушки безопасности зачастую были только опцией
Теперь поговорим о самой конструкции акселерометра. Существует несколько видов устройств в зависимости от их архитектуры. Работа акселерометра может основываться на конденсаторном принципе. Подвижная часть такой системы представляет собой обыкновенный грузик, который смещается в зависимости от наклона устройства. По мере его смещения изменяется емкость конденсатора, а именно меняется напряжение. Исходя из этих данных, можно получить смещение грузика, а вместе с тем и искомое ускорение.
Работа акселерометра может основываться на конденсаторном принципе. Подвижная часть такой системы представляет собой обыкновенный грузик, который смещается в зависимости от наклона устройства. По мере его смещения изменяется емкость конденсатора, а именно меняется напряжение. Исходя из этих данных, можно получить смещение грузика, а вместе с тем и искомое ускорение.
Двухосный роторный гироскоп, его свойства и прецессия механического гироскопа.
Двухосный роторный гироскоп, его свойства и прецессия механического гироскопа.
Радиоуправляемые вертолеты , которые оснащены гироскопом, в воздухе намного устойчивее, чем радиоуправляемые вертолеты, которые не имеют в комплектации гироскопа. Они обеспечивают плавный полет, они не сбиваются с намеченного курса при попадании в воздушную яму. Радиоуправляемые вертолеты с гироскопом позволяют новичкам пилотам, очень быстро освоить основные принципы пилотажа и азов полета. Одной из лучших моделей на радиоуправлении с гироскопом является трехканальный радиоуправляемый вертолет с соосной схемой винтов syma s032 .
Современный элемент смартфона работает на постоянной основе. Это самостоятельный датчик, не требующий калибровки. Его не нужно ни включать, ни отключать. Автоматика сделает эту работу за вас. В случае если устройство отсутствует, то вы не сможете играть в виртуальную реальность. Вам просто придётся купить новый телефон со встроенными функциями.
Множеством интересных функций и датчиков оснащены смартфоны и другие мобильные устройства. Одним из ведущих модулей является гиродатчик или гироскоп. Диковинная новинка в девайсе, выполненная на основе микроэлектромеханической системы, сделала большой рывок в усовершенствование функционала и завоевала большую симпатию среди пользователей. Происхождение слова «гироскоп» имеет давнюю историю. Оно расшифровывается как словосочетание «круг» и «смотрю».
Родоначальником древнегреческого изречения был французский физик Леон Фуко. В XIX веке он занимался исследованием суточного вращения Земли, и этот термин подошёл для нового устройства как нельзя кстати.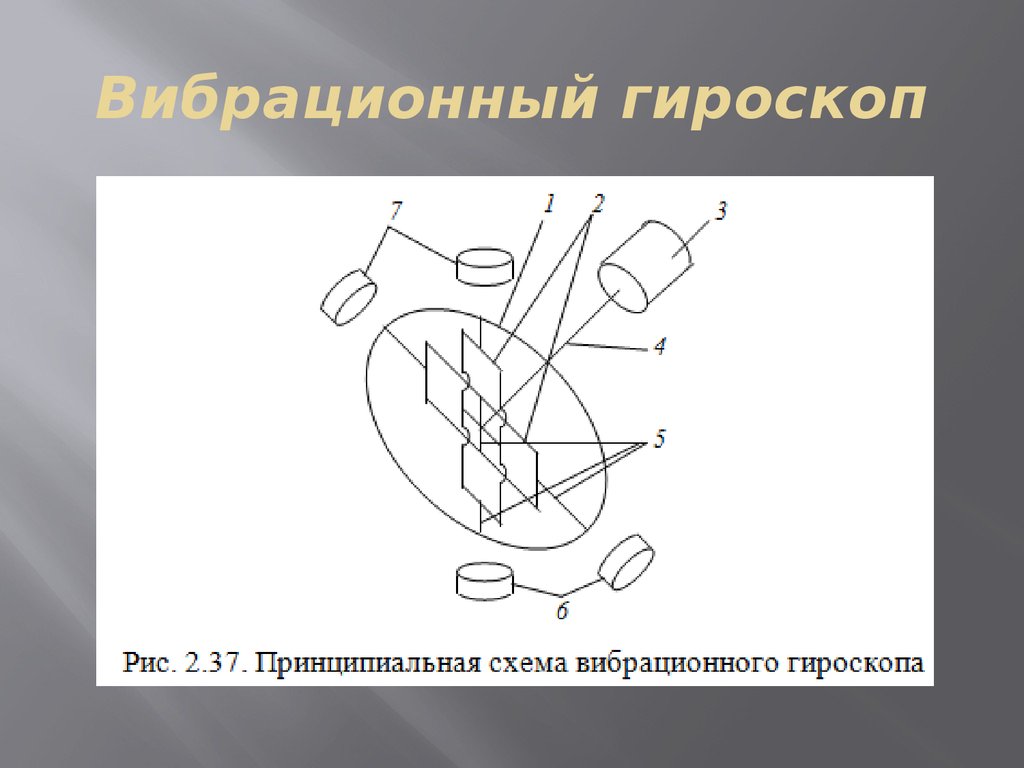 Гиродатчиками пользуются авиакомпании, судоходство, космонавтика. Компания Apple, производитель современных мобильных телефонов, первой взяла за основу данный функционал и внедрила его в iPhone 4. Несмотря на то, что видео ниже на английском языке, демонстрация технологии от Стив Джобса понятна без перевода.
Гиродатчиками пользуются авиакомпании, судоходство, космонавтика. Компания Apple, производитель современных мобильных телефонов, первой взяла за основу данный функционал и внедрила его в iPhone 4. Несмотря на то, что видео ниже на английском языке, демонстрация технологии от Стив Джобса понятна без перевода.
Наряду с легкими функциями разработчики внедрили в устройство более сложные программные обеспечения. Например, в некоторых операционных системах при помощи встряхивания телефона запускается обновление для Bluetooth или запускается специфичная программа по измерению углов наклона и уровня. Гироскоп прекрасно учитывает скорость перемещения, и определяет местоположение человека на незнакомой местности.
С технической точки зрения, гироскоп довольно сложное устройство. При его разработке, за основу взяли принцип работы акселерометра, который представляет из себя колбу с пружиной и грузом внутри. На одной стороне пружины закреплен груз, а вторая сторона пружины зафиксирована на демпфере для гашения колебания.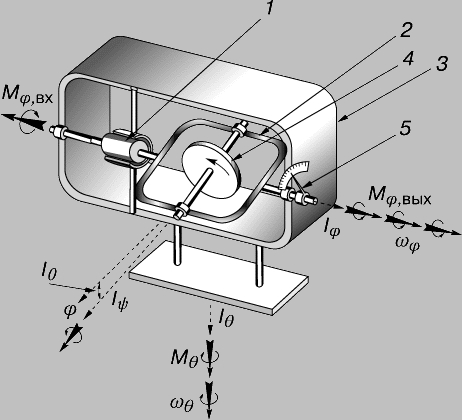 При встряхивании (ускорении) измерительного прибора, прикрепленная масса движется и приводит в напряжение пружину.
При встряхивании (ускорении) измерительного прибора, прикрепленная масса движется и приводит в напряжение пружину.
Такие колебания можно представить в виде данных. Если расположить три таких акселерометра перпендикулярно, то можно получить представление о том, как расположен предмет в пространстве. Поскольку технически расположить такой громоздкий измерительный прибор в смартфоне невозможно, то принцип работы оставили тот же, но груз заменили инертной массой, который расположен в очень маленьком чипе. При ускорении, меняется положение инертной массы и таки образом рассчитывается положение смартфона в пространстве.
С помощью GPS-навигации на дисплее появляется карта, которая фиксирует аналогичное направление объектов при любом повороте тела. Другими словами, если вы повернулись лицом к реке, то она автоматически отобразится на карте. При развороте на 180 градусов к водоему мгновенно происходят аналогичные изменения на мониторе. С использованием этой функции упрощается ориентировка на местности. Особенно это важно людям, занимающимся активными видами отдыха.
Особенно это важно людям, занимающимся активными видами отдыха.
Благодаря точному учёту скорости перемещения управление смартфоном становится более удобным и гармоничным. Зачастую используют гироскопы на Андроид любители компьютерных игр — геймеры. Уникальное устройство в девайсе молниеносно превращает картинки в реальность. Особенно правдоподобными становятся гонки, симуляторы, стрелялки, Pokemon Go.
Достаточно изменить положение смартфона и скорость поворота, то езда на виртуальном автомобиле покажется вам реальной. Герои на дисплее точно направят автомат, нацелят пушку, повернут руль, поднимут в воздух вертолёт, убьют врага. Карманные монстры не будут прыгать по виртуальной траве, а станут двигаться по настоящему миру в видимой области встроенной камеры.
Конечно, это далеко не весь перечень положительных характеристик, присущих Android смартфонам и iPhone. Перечислять приятные и удобные моменты можно бесконечно. Однако не все пользователи оценили универсальные качества по достоинству. Одни предпочли отказаться от гироскопа в новом смартфоне, другие просто отключили его. И этому есть своё объяснение.
Одни предпочли отказаться от гироскопа в новом смартфоне, другие просто отключили его. И этому есть своё объяснение.
Среди многочисленных плюсов бывают малозаметные минусы.
Современный элемент смартфона работает на постоянной основе. Это самостоятельный датчик, не требующий калибровки. Его не нужно ни включать, ни отключать. Автоматика сделает эту работу за вас. В случае если устройство отсутствует, то вы не сможете играть в виртуальную реальность. Вам просто придётся купить новый телефон со встроенными функциями.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
При запуске программы выводится окно с указанием обнаруженных физических датчиков:
Гироскоп: устройство и принцип работы
Гироскоп – это устройство, позволяющее определить положение тела, на котором он установлен в пространстве. С самого появления он стал применяться в военной промышленности, авиации, автомобильном производстве и мореплавании. Первые модели были ориентированы на магнитное поле земли и стали отличным аналогом компасу.
Первые модели были ориентированы на магнитное поле земли и стали отличным аналогом компасу.
Гироскоп мог работать практически в любом положении, невзирая на плохую видимость, тряску и прочие негативные условия. Постепенно размер устройства менялся, и его функционал значительно расширился. Например, в автомобилях стало возможно распределить нагрузку в зависимости от наклона рамы, выбрать оптимальное место для парковки. Со временем производители умных гаджетов и телефонов взяли его себе на вооружение.
Установленный в смартфоне миниатюрный прибор значительно расширил возможности устройства и облегчил использование. Ранее, чтобы посмотреть фото в полноэкранном режиме, нужно было установить соответствующую галочку в настройках или нажать кнопку, сейчас достаточно повернуть устройство, и смартфон сам адаптирует изображение, если в нем включена такая возможность.
Включение гироскопа (функция “Автоповорот” в телефоне) производится из меню настроек или из выдвижной шторки быстрого доступа в верхней части экрана телефона. В зависимости от модели, название может отличаться. Значок обычно символизирует смену положения и понятен пользователю даже с минимальными знаниями о возможностях устройства. При желании функцию можно так же просто деактивировать.
В зависимости от модели, название может отличаться. Значок обычно символизирует смену положения и понятен пользователю даже с минимальными знаниями о возможностях устройства. При желании функцию можно так же просто деактивировать.
Самый простой вариант гироскопа, позволяющий передать физическое положение тела в электронном виде по необходимым координатам, выглядит как две подвижные единицы, которые постоянно находятся в контакте с активными датчиками, фиксирующими их положение. При повороте устройства двигается и весь гироскоп, посылая сигнал об изменившемся местоположении.
Современные устройства учитывают скорость движения подвижной части, силу давления. Именно поэтому в играх с гироскопическим управлением можно резко совершить движение в сторону, повернув устройство в желаемую сторону.
Гироскутер: основные принципы работы
Гироскутер: основные принципы работы
Что собой представляет?
Данный гаджет состоит из нескольких ключевых узлов, включая:
- 1) Колёса-приводы с электрическим мотором;
- 2)Центральный компьютер, обрабатывающий информацию;
- 3) Система гироскопических датчиков, размещённых по всему корпусу;
- 4) Сам корпус;
- 5) Литий-ионный аккумулятор.

Так же, в зависимости от модели, устройство может быть оснащено информативным дисплеем, осветительными приборами, индикаторами и другими дополнениями в виде ЮСБ-портов, динамиков, звуковых сигнализаторов и т.д.
Что ж, с комплектацией разобрались, а теперь рассмотрим сам принцип действия.
Автономность и другие прелести
Источники
Источник — http://www.sensorica.ru/d10-3.shtml
Источник — http://naukatv.ru/articles/330
Источник — http://electrosam.ru/glavnaja/slabotochnye-seti/oborudovanie/giroskop/
Источник — http://theoryandpractice.ru/posts/1097-kak-rabotaet-giroskop-i-chto-obshchego-u-yo-yo-i-samoleta
Источник — http://sovtest-ate.com/news/publications/sovremennye-mems_giroskopy-i-akselerometry/
Источник — http://forum.rcdesign.ru/f4/thread752.html
Источник — http://www.ferra.ru/review/techlife/mems-part-1.htm
Источник — http://www.3vozrast.ru/article/anons/zametka/3926/
Источник — http://hobbyits.com/chto-takoe-giroskop-v-smartfone-i-zachem-on-nuzhen/
Источник — http://v-androide. com/instruktsii/rabota/giroskop-v-telefone.html
com/instruktsii/rabota/giroskop-v-telefone.html
Источник — http://sunwheel.ru/info/giroskuter-osnovnye-printsipy-raboty/
Гироскопический датчик на гироскопе ENC-03J
Электронные гироскопы — преобразователи наклона и угловой скорости в электрический ток. Так же как и механические (ротационные), пьезокерамические электронные гироскопы служат для контроля положения и угловых скоростей с малым временем отклика (до 50 Гц). Электронные датчики-гироскопы марки ENC-03J и ENC-03M появились в розничной торговой сети совсем недавно. Они предназначены для работы в качестве датчиков изменения наклона, а также компенсации дрожания руки (штатива) в видеокамерах и высокотехнологичных фотоаппаратах.
Что и говорить, в современных промышленных устройствах профессионального и бытовою назначения электронные датчики-гироскопы архиважны. Отличием электронных гироскопов от механических собратьев является компактность и малый вес (размер 12 х 8 мм, масса в зависимости от модели 1—20 г), отсутствие изнашивающихся элементов, высокая скорость отклика (минимум инерции), низкое напряжение питания (2,7—5,5 В), малый ток потребления (0,5—15 мА). Диапазон рабочих температур (-5…+75 °С) позволяет производить контроль параметров в широком спектре климатических условий и географических поясов.
Диапазон рабочих температур (-5…+75 °С) позволяет производить контроль параметров в широком спектре климатических условий и географических поясов.
Кроме того, электронные гироскопы выпускаются также и в ЧИП-исполнении, что позволяет использовать их для поверхностного монтажа.
На основе такого электронного датчика создано простое устройство, которое посредством светоизлучающего светодиода сигнализирует об изменении своего, ориентированного на горизонтальную поверхность положения. Схема прибора показана на рис. 2.21.
Рис. 2.21. Электрическая схема гироскопа
Основу устройства составляет пьезокерамический гироскоп ENC-03J производства фирмы «Murata» (Япония). При горизонтальном положении прибора постоянное напряжение на выводе 4 датчика U1 составляет 1,3—1,4 В при Un = 5 В. Коэффициент усиления операционного усилителя DA1 приблизительно равен единице. На вывод 3 датчика U1 поступает напряжение сравнения через низкочастотный фильтр R3C3, который одновременно играет роль обратной связи операционного усилителя.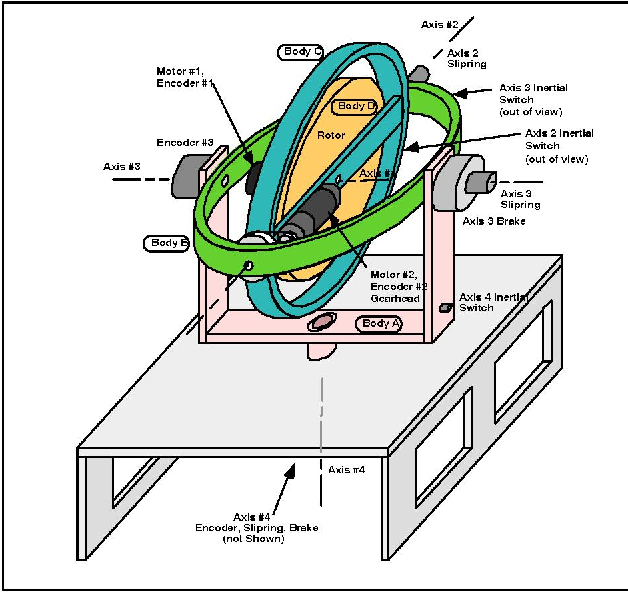
При изменении горизонтального положения датчика (отклонении от 0 °) напряжение на выходе U1 (вывод 4) изменяется в соответствии с коэффициентом преобразования (0,67 мВ/° отклонения в секунду). Частота опроса состояния составляет около 50 Гц. Максимальная угловая скорость относительно строго горизонтального положения (уровень 0) составляет ±300 °/с. Разделительный конденсатор С1 (образующий совместно с резистором R1 частотный фильтр с полосой среза около 0,3 Гц), не пропускает постоянную составляющую напряжения на вход операционного усилителя DA1. При изменении горизонтального положения датчика на выходе DA1 (вывод 6) присутствует напряжение высокого уровня, которое открывает ключевой транзистор VT1, вследствие чего зажигается светодиод HL1.
Все постоянные резисторы — типа МЛТ-0,25 или MF-25. Конденсатор С1 — неполярный типа К10-17, С2— оксидный полупроводниковый танталовый, типа К52-х или К53-х, C3 — типа КМ-6Б.
Оксидный конденсатор С4 типа К50-20 сглаживает пульсации источника питания. Если применяется автономный источник питания— батарея или аккумулятор, данный конденсатор из схемы исключается. Светодиод HL1 — любой типа АЛ307Б или аналогичный. Для лучшего визуального контроля можно использовать светодиод с эффектом мигания. Вместо операционного усилителя КР140УД1208 можно применять КР140УД12, КР140УД20 с любым буквенным индексом. Транзистор VT1— любой кремниевый п-р-п типа с коэффициентом усиления более 40.
Если применяется автономный источник питания— батарея или аккумулятор, данный конденсатор из схемы исключается. Светодиод HL1 — любой типа АЛ307Б или аналогичный. Для лучшего визуального контроля можно использовать светодиод с эффектом мигания. Вместо операционного усилителя КР140УД1208 можно применять КР140УД12, КР140УД20 с любым буквенным индексом. Транзистор VT1— любой кремниевый п-р-п типа с коэффициентом усиления более 40.
Устройство в налаживании не нуждается. В связи с высокой чувствительностью пьезокерамического датчика U1 необходимо жестко крепить его к корпусу устройства, который, в свою очередь, должен иметь максимально ровную горизонтальную поверхность. При Монтаже элементов устройства не перегревайте выводы датчика жалом разогретого паяльника (время пайки не более 1 с).
Пользоваться датчиком просто — достаточно установить его на контролируемой поверхности (если предполагается контроль наклона и стабилизации) или поместить в другую (нежидкую!) контролируемую среду для контроля вибрации.![]()
Источник питания для устройства— стабилизированный с постоянным напряжением 3—5 В. Ток потребления всего узла с датчиком ENC-03J не превышает 5 мА.
Рис. 2.22. Схема включения датчика ENV-05F-03
При использовании в качестве вибродатчика аналогичного прибора ENV-05F-03 параметры устройства улучшаются (повышается точность показаний— чувствительность). Отрицательным моментом такой замены может показаться параметр максимальной угловой скорости— у этого прибора он меньше: ±80 °. Однако применение датчика ENV-05F-03 позволяет избавиться от операционного усилителя (схема включения показа на рис. 2.22).
На кремниевых диодах собран преобразователь напряжения «переменный/постоянный ток», выход которого можно подключить к управляющему узлу, например к точке А (рис. 2.21).
Кашкаров А. П. 500 схем для радиолюбителей. Электронные датчики.
Автомобильные гироскопы – обзор современного состояния
Введение
Гироскопы — это устройства, которые измеряют угловую скорость (angular rate) вращающегося объекта.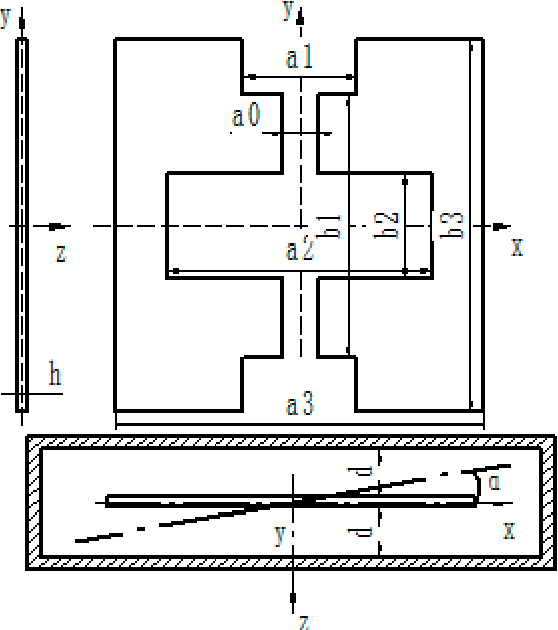 В автомобильных применениях гироскопы используются для измерения скорости вращения автомобиля теоретически относительно трех осей: вертикальной (yaw), поперечной (pitch) или продольной (roll), но наиболее обычными из них являются yaw (yaw rate sensor) и roll (angular rate gyros) типы гироскопов.
В автомобильных применениях гироскопы используются для измерения скорости вращения автомобиля теоретически относительно трех осей: вертикальной (yaw), поперечной (pitch) или продольной (roll), но наиболее обычными из них являются yaw (yaw rate sensor) и roll (angular rate gyros) типы гироскопов.
Ключевые автомобильные применения, для которых разрабатываются новые гироскопы, это:
- Обнаружение крена машины и боковых опрокидываний (Rollover).
- Навигационные системы (GPS и другие).
- Контроль динамики автомобиля ESC, а также АБС.
- IMU.
В автомобильных системах безопасности и комфорта автомобилей класса high-end также востребованы гироскопы, мигрирующие, например, от потребительских применений — таких как контроль многих входных данных и стабилизация видеокамер. Гироскопы могут применяться, например, и для корректировки высоты и стабильности подвески в зависимости от угловой скорости крена (roll) автомобиля.
MEMS-гироскопы играют все более увеличивающуюся роль в автомобильных применениях, и рынок не ограничивается автомобильными применениями. Мировой рынок MEMS-гироскопов, согласно прогнозам, достигнет $800 млн уже в 2010 году.
Мировой рынок MEMS-гироскопов, согласно прогнозам, достигнет $800 млн уже в 2010 году.
Гироскопы классифицируются как в зависимости от применения, так и по их исполнениям: инерциальные (inertialgrade), тактические (tactical-grade) и показателя скорости (rate-grade devices).
В автомобиле преобладают гироскопы скорости вращения. Типичные автомобильные применения включают диапазон полной шкалы в 50–300°/с и разрешение в 0,5–0,05°/с в полосе пропускания менее 100 Гц, в зависимости от применения. Стандартная рабочая температура от –40 до +85 °C.
Многие современные типы автомобильных гироскопических устройств представляют собой вибрационные кориолисовы гироскопы, в которых для определения вращения используется вибрирующий механический элемент [1–18].
В более ранних устройствах для совершения колебаний использовался макроскопический пьезоэлектрический кристалл кварца. По мере развития MEMS-технологий колебательные функции все чаще выполняет кремниевый кристалл, совместимый с технологиями ИС, включающими схемы обработки сигнала и различные интерфейсы.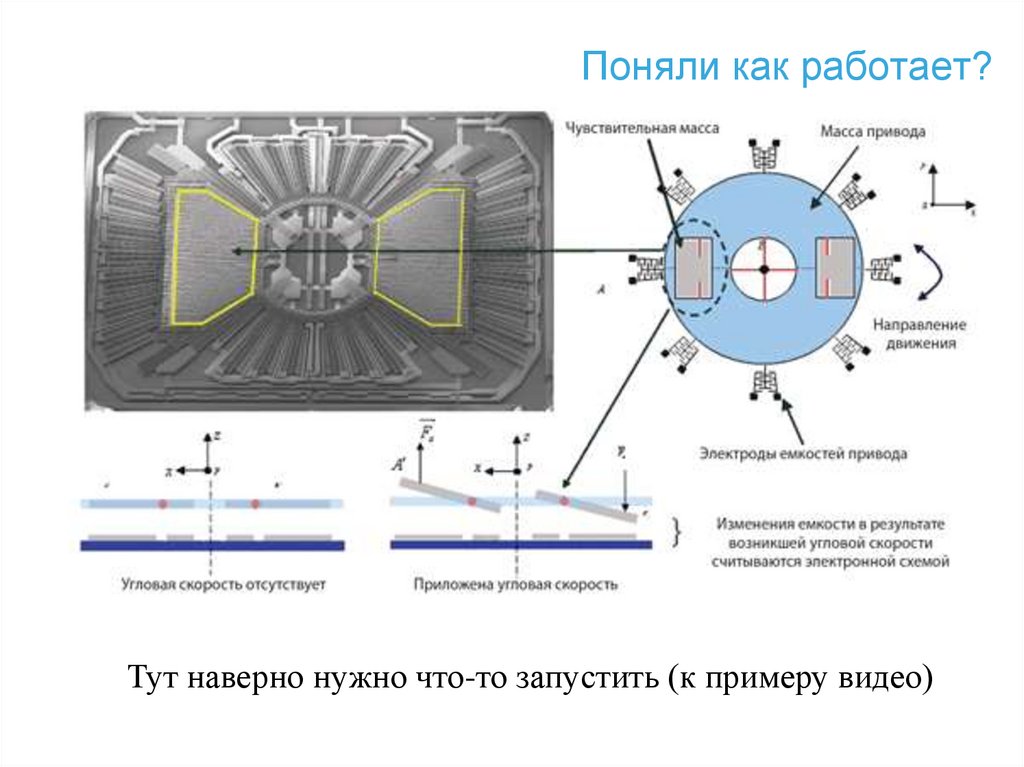
Основные технологии, реализуемые в современных гироскопах, включают:
- камертонные гироскопы Tuning Fork Gyroscope;
- вибрирующее колесо — гироскоп Vibrating Wheel;
- полусферические резонансные гироскопы Wine Glass Resonator Gyroscopes;
- кольцевой резонатор — гироскоп Ring Resonator Gyroscopes;
- вращающееся колесо — гироскоп Spinning Wheel Gyroscope;
- лазерные гироскопы;
- волоконно-оптические гироскопы;
- микрооптические электромеханические гиросистемы Micro-Optical-Electromechanical Systems (MOEMS) Gyros;
- интерферометрические MOEMS-гироскопы.
Теория, основные рабочие принципы и технологии гироскопов
Макро-гироскопы
Традиционные вращающиеся гироскопы, известные более 200 лет, действуют на основе следующего принципа: если вращающийся объект наклонить перпендикулярно к направлению вращения, то он будет иметь прецессию. Это означает, что если прикладывать к гироскопу постоянную внешнюю силу, то он начнет поворачиваться вокруг третьей оси, не совпадающей по направлению с основной осью вращения ротора. Прецессия, величина которой пропорциональна величине действующей силы, удерживает устройство, ориентированное в вертикальном направлении, причем может быть измерен угол наклона относительно опорной поверхности. Однажды раскрученное устройство стремится сопротивляться изменениям в его ориентации вследствие углового момента. Этот эффект известен в физике как гироскопическаяинерция. В случае прекращения внешнего воздействия прецессия мгновенно заканчивается, но ротор продолжает вращаться.
Прецессия, величина которой пропорциональна величине действующей силы, удерживает устройство, ориентированное в вертикальном направлении, причем может быть измерен угол наклона относительно опорной поверхности. Однажды раскрученное устройство стремится сопротивляться изменениям в его ориентации вследствие углового момента. Этот эффект известен в физике как гироскопическаяинерция. В случае прекращения внешнего воздействия прецессия мгновенно заканчивается, но ротор продолжает вращаться.
Основным элементом гироскопа является ротор spinning wheel, размещенный на вращающейся оси (рис. 1). Ротор гироскопа характеризуется тремя степенями свободы (три оси возможного вращения), которые обеспечиваются двумя рамками карданного подвеса. Ротор закреплен во внутреннем карданном подвесе или кольце, имеющем возможность колебаний во внешнем карданном подвесе, который, в свою очередь, может совершать колебания относительно опоры. Внешний подвес закреплен так, что возможно вращение вокруг одной оси в его собственном плане (одна степень свободы), при этом его ось вращения не имеет ни одной степени свободы. Внутренний подвес закреплен во внешнем подвесе так, что может осуществлять вращение вокруг одной оси в собственном плане, причем эта ось всегда нормальна к оси вращения ротора.
Внутренний подвес закреплен во внешнем подвесе так, что может осуществлять вращение вокруг одной оси в собственном плане, причем эта ось всегда нормальна к оси вращения ротора.
Таким образом, внутренний подвес обладает двумя степенями угловой свободы, его ось также обладает одной степенью свободы. Следовательно, ротор обладает тремя степенями угловой свободы, его ось — двумя. Ротор реагирует на силу, приложенную к входной оси, силой реакции вокруг выходной оси, то есть, если на такое устройство не действуют внешние возмущения, ось собственного вращения ротора сохраняет постоянную пространственную ориентацию в пространстве, но под действием момента внешней силы, стремящегося повернуть ось собственного вращения (например, при наклоне гироскопа), ось начинает вращаться, причем не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия — движение, ортогональное направлению наклона). Для устранения многочисленных факторов ошибок в гироскопах используется фиксирование осей пружинами — тогда напряжение пружины будет пропорционально скорости прецессии.
Гироскоп может указывать угол поворота относительно основания, на котором он закреплен, а также угловую скорость. Из-за этих своих свойств гироскоп может применяться в автоэлектронике как датчик угла поворота или угловой скорости.
Оптические гироскопы — следующий тип гироскопических устройств, основанные на том, что лазерный луч многократно отражается в замкнутом контуре, при вращении которого длительность между моментом излучения и получения сигнала будет различной. Оптические гироскопы представляют собой различные модификации интерферометров Сагнака (Sagnac). (Эффект Сагнака состоит в явлении кольцевой интерферометрии. Принцип действия этих устройств основан на том, что два луча посылаются вокруг кругового пути в противоположных направлениях и, в зависимости от угловой скорости вращения пути, интерферометрическим детектором может быть обнаружен фазовый сдвиг, так как скорость света почти всегда остается постоянной).
В лазерных гироскопах RLG (Ring Laser Gyro), получивших применение приблизительно в 1960-х годах, кольцевой путь луча обеспечивается зеркалами. Обычно кольца представляют собой треугольники или прямоугольники с зеркалами на каждом углу.
Обычно кольца представляют собой треугольники или прямоугольники с зеркалами на каждом углу.
Теория работы гироскопов дизайна Ring Laser показана на рис. 2. Простейший лазерный гироскоп представляет собой даже не кольцо, а треугольник. Лазерный источник выводит два луча, направленных в противоположных направлениях вокруг кольца, до момента достижения ими детектора. Детектор считает частоту биений комбинированной световой волны, которая прямо пропорциональна углу поворота гироскопа.
Два главных источника погрешностей кольцевых лазерных гироскопов — смещение и мертвая зона на малых углах. Смещение является следствием различных коэффициентов преломления пар лучей.
В FOG (Fiber Optic Gyro) путь лазера обеспечивается посредством оптоволокна. Волоконно-оптический гироскоп также использует интерференцию света, для того чтобы обнаруживать механическое вращение. Датчик представляет собой катушку оптоволокна, по которой два луча направляются в противоположные стороны и, согласно эффекту Сагнака, луч, путь которого лежит против вращения, проходит меньшее расстояние, что вызывает интерференцию лучей на детекторе, пропорциональную угловой скорости.
FOG показывают более высокое разрешение и более высокую точность, чем RLG, но и более высокий дрейф, а также чувствительность к поперечной вибрации, ускорению и ударам.
Преимущества оптических гироскопов по сравнению с вращающейся массой состоят в отсутствии инерции, бесконтактности (хотя лазерный луч и оптоволокно характеризуются не бесконечным сроком службы), большей гибкости, большей надежности, а также в меньшем размере и весе.
В настоящее время интенсивно развиваются оптические MEMS, и это касается всех сфер применения, в том числе и гироскопов. Многие компании сфокусировали свои разработки на построении массивов объемных кремниевых микромеханических зеркал и их интеграции с обрабатывающей и управляющей электроникой [1]. Перспективы этих устройств для автоэлектроники значительны, и, по мере коммерциализации технологий, будут обсуждаться в дальнейшем.
Кориолисовы вибрационные гироскопы
Принцип работы вибрационных кориолисовых гироскопов основан на том, что вращающийся вибрационный элемент (вибрационный резонатор) подвержен эффекту Кориолиса, состоящему в том, что вызывается вторичная вибрация, ортогональная оригинальному направлению вибрации. Детектирование параметров вторичной вибрации позволяет определять угловую скорость.
Детектирование параметров вторичной вибрации позволяет определять угловую скорость.
Эффект Кориолиса может быть понятно объяснен при помощи рис. 3 [2]. При вращении вибрирующей плоскости возникает ускорение (или сила) Кориолиса, пропорциональное скорости вращения. Объект, размещенный на вращающейся платформе радиусом r и перемещаемый вместе с платформой с угловой скоростью ω, характеризуется тангенциальной скоростью ωr относительно Земли. Объект, приближенный к центру, отличается значительно меньшей тангенциальной скоростью, чем объект, размещенный ближе к краю платформы в результате его перемещения в радиальном направлении. Скорость увеличения тангенциальной скорости, вызванная радиальной скоростью ?, представляет собой ускорение Кориолиса.
Если r изменяется вместе со скоростью ?, тангенциальное ускорение Кориолиса составит 2ω?. При наличии массы объекта M платформа должна прикладывать силу реакцию опоры 2Mω?.
В вибрационных гироскопах вместо подвижного объекта используется резонирующая масса, размещаемая на вращающейся платформе. Для того чтобы измерять ускорение Кориолиса, которое испытывают масса и фрейм и вследствие этого оба перемещаются в сторону на 90° от вибрационного движения, фрейм с резонирующей массой прикрепляется к подложке посредством пружин, размещенных также ортогонально к резонансному движению. Для измерения ускорения Кориолиса часто используются пальцеобразные конденсаторные обкладки (рис. 3б). Если пружины характеризуются жесткостью K, перемещение относительно фрейма составит 2 ω?M/K. При увеличении скорости вращения ? увеличивается и перемещение массы, и сигнал формируется на основе соответствующего емкостного изменения.
Для того чтобы измерять ускорение Кориолиса, которое испытывают масса и фрейм и вследствие этого оба перемещаются в сторону на 90° от вибрационного движения, фрейм с резонирующей массой прикрепляется к подложке посредством пружин, размещенных также ортогонально к резонансному движению. Для измерения ускорения Кориолиса часто используются пальцеобразные конденсаторные обкладки (рис. 3б). Если пружины характеризуются жесткостью K, перемещение относительно фрейма составит 2 ω?M/K. При увеличении скорости вращения ? увеличивается и перемещение массы, и сигнал формируется на основе соответствующего емкостного изменения.
Гироскоп может находиться в любом положении относительно вращающегося объекта, но его сенсорная ось должна быть тангенциальна направлению вращения.
Камертонные гироскопы
Микромеханические гироскопы дизайна tuning fork впервые были разработаны Charles Stark Draper Laboratory в 1991–1993 годах (рис. 4).
Tuning Fork Gyroscope — это устройства, в которых две кремниевые массы совершают колебания равной амплитуды, но в противоположном направлении. При вращении сила Кориолиса создает ортогональную вибрацию, которая может измеряться различными средствами, образуя сигнал, пропорциональный смещению от плоскости.
При вращении сила Кориолиса создает ортогональную вибрацию, которая может измеряться различными средствами, образуя сигнал, пропорциональный смещению от плоскости.
Физическая модель эквивалентна двум зубцам камертона, связанным посредством соединительной балки, которые резонируют с определенной амплитудой. Когда зубцы вращаются, сила Кориолиса действует как сила, перпендикулярная проекциям зубцов в плоскости камертона, которая обнаруживается как поворот или скручивание (рис. 4а). Данная сила пропорциональна приложенной угловой скорости.
Гироскоп Charles Stark Draper Laboratory использует пальцеобразные емкостные электродные структуры — для того чтобы вводить камертон в резонанс и осуществлять его вращение вокруг любой оси в плоскости ИС (рис. 4в). Помимо емкостного, могут быть использованы также электростатические, электромагнитные, пьезоэлектрические или пьезорезистивные измерительные принципы.
Первый гироскоп Charles Stark Draper Laboratory разрешением 4000°/ч и дрейфом в 1°/ч был разработан именно для автомобильной промышленности и применялся для контроля проскальзывания в АБС.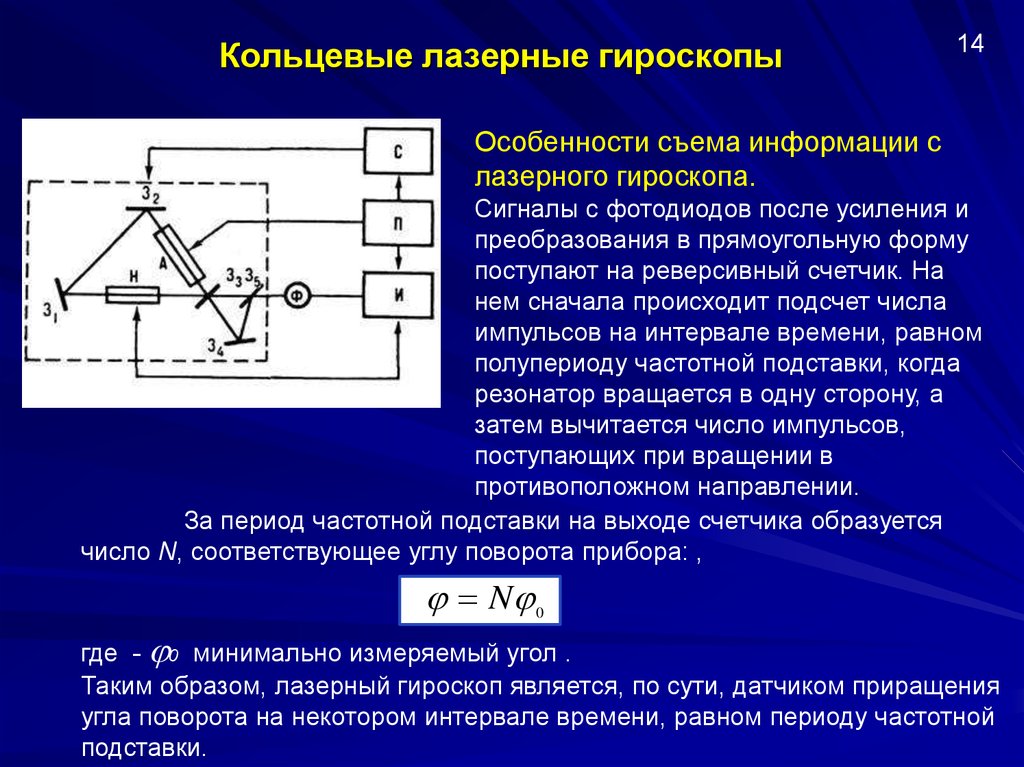 Затем характеристики гироскопов tuning fork были улучшены. В 1994 году было достигнуто разрешение 500°/ч, в 1997 году — 100°/ч. Стабильность дрейфа достигла величины 0,1°/ч. При этом также были значительно снижены шумы и повышен SNR [3].
Затем характеристики гироскопов tuning fork были улучшены. В 1994 году было достигнуто разрешение 500°/ч, в 1997 году — 100°/ч. Стабильность дрейфа достигла величины 0,1°/ч. При этом также были значительно снижены шумы и повышен SNR [3].
Технологию Draper’s Tuning Fork в свое время приобрела корпорация Honeywell — для того, чтобы применять ее вместо своих лазерных гироскопов.
В настоящее время дизайн tuning fork — один из наиболее популярных и успешных MEMS-дизайнов, его используют такие ведущие компании, как Analog Devices, Bosch, Melexis, Systron Donner или Matsushita.
Гироскопы дизайна Vibrating-Wheel
Гироскоп Vibrating-Wheel включает колесо, которое вибрирует вокруг своей оси симметрии. Вращение в плоскости образует наклон колеса, который определяется, например, емкостными электродами (рис. 5а).
Этот дизайн позволяет определять две оси вращения с одним вибрирующим колесом. Поверхностный микромеханический поликремниевый гироскоп дизайна vibrating wheel gyro впервые был разработан U. C. Berkeley Sensors and Actuators Center (рис. 5б). В настоящем эта технология используется компанией Bosch.
C. Berkeley Sensors and Actuators Center (рис. 5б). В настоящем эта технология используется компанией Bosch.
Гироскопы дизайна Wine Glass Resonator
Гироскопы дизайна Wine Glass Resonator изготавливаются из расплавленного кремнезема и известны также как полусферические резонансные гироскопы hemispherical resonant gyro. Исследователи Мичиганского университета (University of Michigan) разработали различные модификации кольцевого резонирующего гироскопа resonant ring gyros в планарной форме. В гироскопе wine glass gyro резонансное кольцо (resonant ring) вводится в резонанс, и положения узловых точек индицируют угол вращения. В настоящее время аналогичные исследования проводят ученые Калифорнийского университета (University of California), также заинтересованные в приобретении ведущих позиций в области MEMS-гироскопов [4–7].
Технология vibratory ring лежит в основе коммерчески доступных гироскопов Silicon Sensing Systems.
Помимо рассмотренных выше основных типов MEMS-гироскопов разрабатываются и некоторые другие типы устройств, одно из которых описано в [3].
Пьезоэлектрический гироскоп Piezoelectric Plate Gyroscope
Данный тип гироскопов использует в качестве основы плату из материала PZT [3]. Пьезоэлектрический гироскоп функционирует подобно многим другим вибрационным MEMS-гироскопам, причем вибрирующим телом в данном случае служит пьезоэлектрический лист из материала PZT, характеризующийся длиной и шириной, много большей, чем ее высота. Вибрация листа осуществляется в направлении толщины материала, что требует переменного напряжения, прилагаемого поперек пластины. Когда вибрирующая плата вращается вокруг оси, перпендикулярной управляющему напряжению, наводится напряжение в третьем ортогональном направлении, пропорциональное угловой скорости.
Используемый в прошлом для построения макроустройств, достаточно простой по сравнению с гироскопами fork или ring-типов, рассматриваемый дизайн легко реализуем и на микроуровнях. Преимущество перед обычными вибрационными гироскопами состоит в том, что для получения читаемого выхода требуется много меньшее управляющее напряжение. Электрические выводы подсоединяются к 6 сторонам образца материала и локализуются в верхней части тонкой мембраны над полостью в кремниевой подложке. Полость придает больше свободы пластине PZT для вибрации и деформирования. Выводы обеспечивают управляющее напряжение и измерение выходного сигнала.
Электрические выводы подсоединяются к 6 сторонам образца материала и локализуются в верхней части тонкой мембраны над полостью в кремниевой подложке. Полость придает больше свободы пластине PZT для вибрации и деформирования. Выводы обеспечивают управляющее напряжение и измерение выходного сигнала.
Так как пластина характеризуется x–y-симметрией, одиночная пластина может измерять вращение в двух направлениях. Тем не менее ее чувствительность составляет всего 38 мкВ, тогда как ring-гироскоп обладает чувствительностью, равной приблизительно 200 мкВ. Помимо того, традиционные гироскопы при отсутствии вращения в значительной степени приближаются к идеально нулевому выходу, тогда как пьезоэлектрические гироскопы выводят до 100 мВ смещения. Если управляющее напряжение является переключаемым, то же самое устройство может измерять вращение и в третьем направлении, но с меньшей чувствительностью. Устройство легко интегрируется с чипами ИС. При использовании гироскопов ring или tuning fork фактически требуется три гироскопа для детектирования трех направлений вращения.
Квантовые гироскопы
В основе квантовых гироскопов лежит эффект Джозефсона (открытый Б. Джозефсоном в 1962 году в Кембриджском университете), состоящий в том, что электрический ток может мигрировать между двумя сверхпроводящими материалами, разделенными тонким слоем изолятора.
Эффект Джозефсона стал относиться затем к поведению двух слабо связанных квантовых систем, сформированных молекулами, которые обладают идентичными волноподобными свойствами. Эффект Джозефсона относится также к соединению двух сверхпроводящих жидкостей: когда давление прикладывается к одной стороне слабой связи, жидкость будет колебаться от одной стороны слабой связи к другой.
Если взять любую трубку, сформованную в виде тора и содержащую сверхпроводящую жидкость (liquid helium-3), которая имеет два места со слабым соединением (тонкие перфорированные мембраны нитрида кремния), то приложением малых значений давлений создается волна с частотой, зависящей от давления, и амплитудой, зависящей от вращения тора и измеряемой электрическими методами. Автор этой модели первого квантового гироскопа, отличающегося сверхчувствительностью,— Ричард Паккард (Richard Packard) и его коллеги из Калифорнийского университета (University of California, Berkeley).
Автор этой модели первого квантового гироскопа, отличающегося сверхчувствительностью,— Ричард Паккард (Richard Packard) и его коллеги из Калифорнийского университета (University of California, Berkeley).
Основные технические факторы, управляющие рынком гироскопов
Большинство современных исследований в области MEMS-гироскопов направлено на реализацию технологий поверхностной микромеханики и создание однокристальных исполнений с 6 степенями свободы для IMU.
Как следует из теории и принципов работы, рассмотренных выше, гироскопы представляют собой сложные MEMS-устройства, интегрированные в одно устройство, включающие самонастраивающийся резонатор в управляющей оси и микродатчик ускорения в сенсорной оси. Абсолютное значение кориолисовой силы и ускорения на порядок меньше, чем ускорения, детектируемые высокообъемными автомобильными MEMS-акселерометрами.
Главной проблемой MEMS-гироскопов является достижение высоких уровней исполнений и низкой цены. Современные автомобильные гироскопы могут стоить порядка $40 для таких востребованных применений, как VSC, навигационные системы, и несколько меньше для таких применений, как обнаружение событий rollover. Характеристики гироскопов чувствительны к производственным допускам, погрешностям корпусирования, линейному ускорению, температуре. Для того чтобы достигнуть высоких объемов и низкой цены, много факторов должно учитываться еще на стадии проектирования.
Характеристики гироскопов чувствительны к производственным допускам, погрешностям корпусирования, линейному ускорению, температуре. Для того чтобы достигнуть высоких объемов и низкой цены, много факторов должно учитываться еще на стадии проектирования.
Обзор современного рынка автомобильных вибрационных гироскопов
Ведущие производители автомобильных гироскопов — это Analog Devices, Bosch, Denso, BEI Systron Donner, Silicon Sensing Systems, Infineon, Matsushita, Melexis. Сравнительные технические данные некоторых устройств, рассматриваемых далее, приведены в таблице.
Таблица. Сравнительные технические данные основных коммерчески доступных автомобильных гироскопов
Гироскопы Analog Devices
Компания Analog Devices — технологический лидер в области MEMS-гироскопов, представляющих собой различные модификации камертонных гироскопов tuning forks [2, 8–12].
Технологии iMEMS® и iSensor™ Gyros компании Analog Devices составляют основу растущего семейства MEMS-гироскопов yaw rate типа.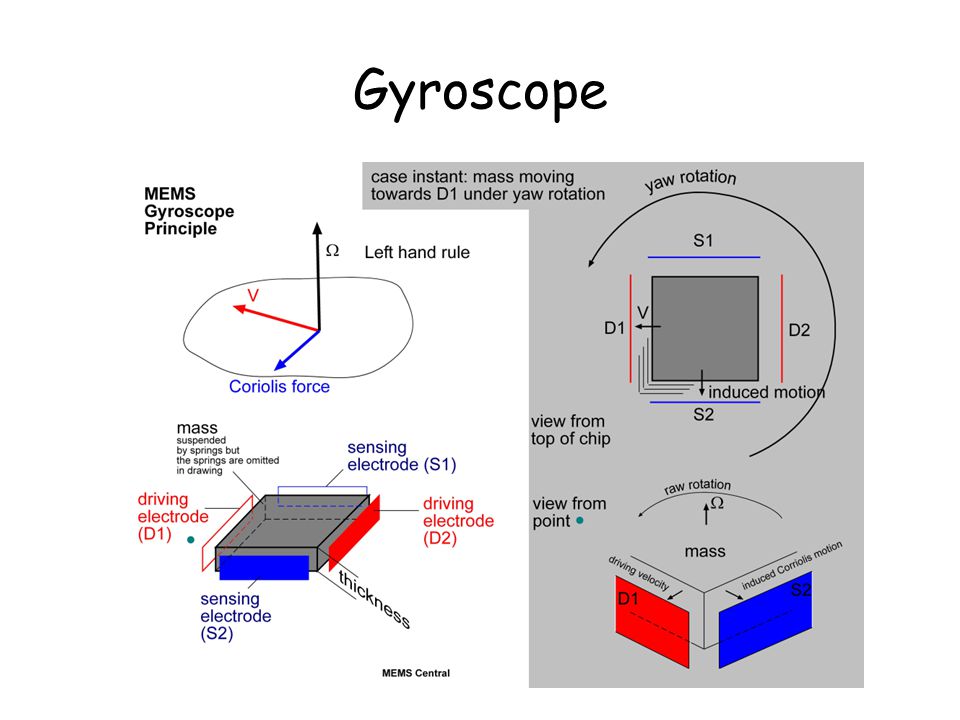 iMEMS означает акцент на полностью интегрированном решении датчика, включающего поверхностную микромеханическую структуру и схему обработки на одном кремниевом кристалле. Базовые принципы iMEMS Gyros реализованы в линейке датчиков ADXRS (рис. 6а-б).
iMEMS означает акцент на полностью интегрированном решении датчика, включающего поверхностную микромеханическую структуру и схему обработки на одном кремниевом кристалле. Базовые принципы iMEMS Gyros реализованы в линейке датчиков ADXRS (рис. 6а-б).
iSensor Gyros означает дополнительную интеллектуальную функциональность гироскопов, встроенную обработку сигнала и контроль — признаки, наиболее полно реализованные компанией в линейке датчиков ADIS Gyros, значительно пополненной в течение второго полугодия 2006 года и насчитывающей в настоящий момент 7 устройств.
Гироскопы обоих семейств ADI выполнены на одном кремниевом кристалле, который включает механическую часть датчика и ASIC. Масса привязывается к поликремниевому фрейму, что позволяет ей резонировать только в одном направлении (исключение составляет только ADIS16350 — трехосевой датчик, детектирующий угловое и линейное движение). Емкостные кремниевые сенсорные элементы с неподвижными кремниевыми консолями, прикрепленными к подложке и резонатору, детектируют наведенное силой Кориолиса смещение резонирующей массы и фрейма.
Емкостные элементы представляют собой кремниевые балки, связанные с двумя настройками кремниевых балок, прикрепленных к подложке, что формирует таким образом два конденсатора с одинаковыми номиналами. Перемещение вследствие вращения наводит в этой системе дифференциальную емкость, равную 2 ??MC/gK, что прямо пропорционально угловой скорости [2]. На практике достигается высокая точность данного соотношения, с нелинейностью менее 0,1%.
Линейка семейства ADXRS включает три датчика ADXRS150 (±150°/с, $30), ADXRS300 (±300°/с, $30) и ADXRS401 (±75°/с, $22), с применением различных вариантов их корпусирования.
Все гироскопы ADXRS — это yaw-rate-гироскопы, но они могут измерять угловую скорость в направлении любой оси за счет выбора подходящего крепления. Эти устройства предназначены для систем автомобильной безопасности, навигации, стабилизации изображений, блоков инерциальных измерений, а также стабилизации платформ, в которых реализована данная технология.
Интеграция электроники и механической части на одном кремниевом кристалле — ключевой признак устройств ADXRS. Встроенная электроника гироскопов ADXRS позволяет детектировать емкостные изменения порядка 12×10–21 Ф при отклонении балок в 0,00016 Е. Дифференциальный сигнал извлекается на частоте резонатора и может быть отделен от шумов посредством корреляции. Гироскопы ADXRS характеризуются также повышенной устойчивостью к вибрациям и ударам до 1,000 g — они используют два механически независимых резонатора: для того, чтобы обнаруживать сигналы в дифференциальном режиме и сбрасывать внешние ускорения, не связанные с угловым движением. Как результат, два резонатора измеряют то же вращение, но дают выход противоположной полярности. Для измерения угловой скорости используется разница между двумя сигналами, которые поступают на входы чувствительных предусилителей. Эта схема требует точного согласования сенсорных элементов.
Встроенная электроника гироскопов ADXRS позволяет детектировать емкостные изменения порядка 12×10–21 Ф при отклонении балок в 0,00016 Е. Дифференциальный сигнал извлекается на частоте резонатора и может быть отделен от шумов посредством корреляции. Гироскопы ADXRS характеризуются также повышенной устойчивостью к вибрациям и ударам до 1,000 g — они используют два механически независимых резонатора: для того, чтобы обнаруживать сигналы в дифференциальном режиме и сбрасывать внешние ускорения, не связанные с угловым движением. Как результат, два резонатора измеряют то же вращение, но дают выход противоположной полярности. Для измерения угловой скорости используется разница между двумя сигналами, которые поступают на входы чувствительных предусилителей. Эта схема требует точного согласования сенсорных элементов.
Портфолио гироскопов Analog Devices в последнее время значительно расширилось и включает гироскопы с более высокими рабочими характеристиками, увеличенной функциональностью, а также более эффективные в стоимостном выражении, оптимальным образом заполняющие продуктовый зазор между дорогими и прецизионными устройствами и менее дорогими датчиками. Помимо того, что непрерывно совершенствуется электроника обработки сигнала, компания ADI реализует перспективы создания мультиосевых гироскопов, интегрирующих как акселерометры, так и гироскопы на одном кристалле.
Помимо того, что непрерывно совершенствуется электроника обработки сигнала, компания ADI реализует перспективы создания мультиосевых гироскопов, интегрирующих как акселерометры, так и гироскопы на одном кристалле.
Линейка высокоинтегрированных интеллектуальных датчиков ADIS iSensor в настоящее время включает два датчика с цифровым интерфейсом SPI ADIS16100 (±300°/c, $34,95) и ADIS16080 (±80°/c, $34,95), ультрамалошумящий (0,015°/с/?Гц) аналоговый гироскоп ADIS16120 (±300°/c, $629,00), программируемые датчики с интерфейсом SPI ADIS16250 (±20…±320°/c, $41,98), ADIS16251 (±20…±80°/c, $44,95) и ADIS16255 (±80…±320°/c, $55,90) — программируемый гироскоп с температурной компенсацией. Новейшее дополнение к семейству — трехосевой гироскоп ADIS16350.
Основное назначение пополняемой линейки ADIS iSensor — повысить рабочие характеристики гироскопов ADXRS дополнительной функциональностью обработки сигнала: калибровка/тюнинг, SPI и другие ASIC-интерфейсы, цифровой ввод/вывод, встроенная интеллектуальность и программирование, управление питанием, вплоть до беспроводных связей и объединения гироскопов с акселерометрами. Гироскопы рассчитаны на различные применения, включая автомобильные — в навигации и противоугонных системах. Это однокомпонентное решение на основе технологии Analog Devices iMEMS Motion Signal Processing требует вдвое меньше пространства, чем существующие многокомпонентные дискретные решения, что также снижает системную цену и сроки подготовки производства.
Гироскопы рассчитаны на различные применения, включая автомобильные — в навигации и противоугонных системах. Это однокомпонентное решение на основе технологии Analog Devices iMEMS Motion Signal Processing требует вдвое меньше пространства, чем существующие многокомпонентные дискретные решения, что также снижает системную цену и сроки подготовки производства.
Например, в ADIS16080 (рис. 6в) сигнал с механической части гироскопа подается на последовательность ступеней усиления и демодуляции. Сигнал затем преобразуется в интерфейс SPI, цифровые выходные данные которого пропорциональны входной угловой скорости. Применение внешнего резистора позволяет увеличивать измерительный диапазон. Дуальный сенсорный дизайн сбрасывает внешние g—усилия и вибрацию. Производство датчика вместе с электроникой обработки сигнала повышает устойчивость работы датчика в шумовом окружении. После стадии демодуляции интегрированный ФНЧ первого порядка ограничивает высокочастотные помехи прежде конечного усиления. Частотная полоса регулируется вторым ФНЧ, настроенным на 40 Гц. Применение внешнего конденсатора допускает снижение частотной полосы.
Частотная полоса регулируется вторым ФНЧ, настроенным на 40 Гц. Применение внешнего конденсатора допускает снижение частотной полосы.
Посредством SPI-интерфейса обеспечивается также доступ к измерениям внешней температуры. Пользователю предоставляется возможность ввода двух аналоговых сигналов. Гироскоп снабжается двумя цифровыми входами самотестирования, позволяющими производить электромеханическое возбуждение датчика и схемы обработки. ADIS16080 выпускается в 16-терминальном корпусе LGA — 8,2×8,2×5,2 мм.
Новое дополнение к семейству датчиков iSensor, например, программируемый гироскоп ADIS16250 в корпусе с размерами LGA (11×11×5,8 мм) характеризуется малым энергопотреблением и увеличенной функциональностью.
ADIS16120 — это малошумящий датчик угловой скорости, который включает всю необходимую обработку сигнала и обеспечивает аналоговый выход, пропорциональный угловой скорости в динамическом диапазоне ±300°/с. Малого смещения и высокой точности позволяет добиться калибровка в условиях производства. Дизайн датчика обеспечивает значительную устойчивость к вариациям температуры, напряжения, линейного ускорения, вибрации и допускам при включении устройства в модуль верхнего уровня.
Дизайн датчика обеспечивает значительную устойчивость к вариациям температуры, напряжения, линейного ускорения, вибрации и допускам при включении устройства в модуль верхнего уровня.
ADIS16250 (рис. 6г) заполняет продуктовый зазор между дорогими гироскопами ADIS16120 (±300°/с) — порядка $600 — с ультравысокими рабочими характеристиками (например, шумовая плотность 0,015°/с/√Гц) и датчиками среднего уровня ADIS16100 и ADIS16080.
Гироскоп ADIS16250 построен на семействе ADIS1620 акселерометров iSensor и представляет собой первый MEMS-гироскоп, который обеспечивает цифровое масштабирование и программируемость и предоставляет разработчику возможность одновременного контроля чувствительности, скорости дискретизации, настройки выходной фильтрации, самотестирования, цифровой функции alarm и режимов управления питанием для достижения малого энергопотребления. Выходной интерфейс датчика — SPI, обеспечивающий доступ к 14-битным данным гироскопа, 12-битным — температуры, измерениям напряжения питания, а также вспомогательный аналоговый выход.
Программирование выполняется через стандартный интерфейс. Для программирования датчика выпускается сопрягаемый с ПК оценочный комплект ADISEVAL, обеспечивающий легкий доступ разработчиков к калиброванным цифровым данным ADIS16250 и других датчиков.
В зависимости от требований к применению, чувствительность ADIS16250 может варьироваться в цифровой форме с масштабированием динамического диапазона от ±80°/с до ±320°/с. Выходы устройств калибруются при производстве датчиков. ADIS16250 также характеризуется механизмом автообнуления, применяемым для внутрисистемной калибровки и минимизации системных допусков и дрейфов.
ADIS16350 — первый интегрированный датчик ADI на основе технологии iSensorTM, обеспечивающий законченное трехосевое сканирование угловой скорости (в диапазоне ±320°/с) и линейного движения — ускорения до ±10 g в частотной полосе до 350 Гц посредством одного ультракомпактного модуля в корпусе с размерами 22,7×23,2×22,9 мм, включающего встроенную обработку сигнала для калибровки и настройки датчика. SPI-порт, рассчитанный на передачу цифровых данных и программирование, обеспечивает доступ ко всем встроенным датчикам: гироскопам в оси X, Y, и Z; датчикам линейного ускорения в оси X, Y и Z, датчику температуры, мощности, SPI-порт также имеет вспомогательный аналоговый вход. Датчики инерции представляют собой прецизионно выровненные и откалиброванные по смещению и чувствительности устройства.
SPI-порт, рассчитанный на передачу цифровых данных и программирование, обеспечивает доступ ко всем встроенным датчикам: гироскопам в оси X, Y, и Z; датчикам линейного ускорения в оси X, Y и Z, датчику температуры, мощности, SPI-порт также имеет вспомогательный аналоговый вход. Датчики инерции представляют собой прецизионно выровненные и откалиброванные по смещению и чувствительности устройства.
Системные интерфейсы упрощаются за счет дополнительных программируемых признаков: это встроенная автокалибровка смещения, цифровая фильтрация и контролируемая скорость дискретизации, самотестирование, управление питанием, программируемый мониторинг условий с функцией alarm и вспомогательный цифровой ввод/вывод.
Гироскопы Robert Bosch
Компания Robert Bosch выпускает интегральные кремниевые вибрационные гироскопы, разработанные как для детектирования оси Z (tuning fork) — с вибрацией и направлением чувствительности в плане ИС, так и оси X или Y (vibrating wheel). Концепции Bosch показаны на рис. 7 [13–14].
Концепции Bosch показаны на рис. 7 [13–14].
Для обнаружения крена и систем навигации Bosch разработала две базовые модели датчиков с аналоговым выходом — SMG040 и SMG045. Для этих ИС необходима внешняя схема, выполняющая управление возбуждением гироскопа, усиление сигнала и некоторые другие функции. Линейка специализированных интегральных компонентов 2-го поколения, которые производит Bosch, включает аналоговый датчик для обнаружения крена SMG061 и цифровой датчик SMG060, а также датчики для навигационных систем SMG066 с аналоговым выходом и цифровой датчик SMG065. Измерительные диапазоны датчиков варьируются в зависимости от применения: ±240°/с и ±250°/с (крен) и ±75°/с и ±80°/с (навигационные системы).
Все ИС гироскопов Bosch построены на основе двухкристальной модели — микромеханического сенсорного элемента и ASIC, осуществляющей функции управления гироскопом, которые объединены в корпусе PLCC44. Сенсорный элемент представляет собой колеблющуюся массу с чувствительной осью в плоскости чипа. Микромеханическая структура уплотняется под вакуумом на уровне подложки.
Микромеханическая структура уплотняется под вакуумом на уровне подложки.
Сенсорный элемент SMG040 имеет симметричный слой только с одним подвесом в точке крепления. За счет приложения электростатических сил к пальцеобразным структурам масса осуществляет угловые колебания в точке крепления в центре массы. Управляющее колебание стабилизируется электронным циклом контроля в оценочной ASIC.
Вследствие преобразования углового момента угловая скорость вокруг оси в плане чипа будет вызывать колебания массы в направлении из плоскости.
Электроды, размещаемые на подложке (detection counterelectrodes) под массой, предназначены для емкостного измерения отклонения массы. Сигналы этих электродов модулируются на частоте управляющих колебаний. После усиления и вычитания сигнал, пропорциональный угловой скорости, выделяется при помощи синхронной демодуляции. Корректную фазу демодуляции обеспечивает блок PLL.
Датчик формирует ратиометричный аналоговый сигнал, пропорциональный половине напряжения питания номиналом в 4,8 В. Чувствительность и смещение калибруются к их номинальным значениям при производстве. Тестирование механики и электроники датчика осуществляется приложением логического уровня напряжения к специальному тестовому выводу датчика BITE (Build In Test Equipment).
Чувствительность и смещение калибруются к их номинальным значениям при производстве. Тестирование механики и электроники датчика осуществляется приложением логического уровня напряжения к специальному тестовому выводу датчика BITE (Build In Test Equipment).
Сравнительные технические данные датчиков представлены в таблице.
Гироскопы BEI Systron Donner
BEI Systron Donner Automotive Division (SDAD) разрабатывает и поставляет инерциальные датчики для систем обнаружения крена и контроля динамики, а также АБС. Микромеханические кварцевые инерциальные элементы GyroChip датчиков измеряют угловую скорость вращения и линейное ускорение, используя камертонный принцип tuning fork (рис. 8). Датчики формируют сигнал, пропорциональный скорости вращения, используя пьезоэлектрические методы возбуждения и детектирования.
Кварцевые датчики инерции GyroChip производятся с использованием фотолитографических процессов и технологий MEMS, сходных с теми, что применяются при производстве кварцевых часов. Инновационные твердотельные гироскопы SDAD используют сенсорный элемент, который производится методами поверхностной микромеханики из чистого кристаллического кварца. Применение пьезоэлектрического кварцевого материала упрощает сенсорный элемент, а также обеспечивает чрезвычайно высокую температурную и долговременную стабильность, равно как и увеличенную надежность и долговечность.
Инновационные твердотельные гироскопы SDAD используют сенсорный элемент, который производится методами поверхностной микромеханики из чистого кристаллического кварца. Применение пьезоэлектрического кварцевого материала упрощает сенсорный элемент, а также обеспечивает чрезвычайно высокую температурную и долговременную стабильность, равно как и увеличенную надежность и долговечность.
В отличие от традиционных сложных механических гироскопов с сотнями индивидуальных прецизионных частей и ограниченным сроком службы, кварцевые датчики SDAD включают монолитный сенсорный элемент, работающий без режимов работы, вызывающих износ.
По сравнению с другими твердотельными технологиями, Fiber Optic Gyroscopes (FOG) и Ring Laser Gyroscopes (RLG), которые характеризуются значительными временными и денежными затратами, технология SDAD отличается простотой сенсорных элементов и удовлетворительным соотношением высокие объемы/низкая цена.
Каждый сенсорный элемент закорпусирован в герметичные металлические головные части, которые в комбинации с дискретной электроникой устанавливаются в сенсорные блоки.
Systron Donner Automotive производит различные датчики угловой скорости GyroChip — как для одноосевых измерений, так и в сочетании GyroChip с акселерометрами для мультиосевых измерений.
Одноосевые датчики GyroChip rate sensor также различным образом конфигурируются для OEM-требований. Модели, размещенные в производстве, предполагают включение встроенной непрерывной тестовой функции и адаптированные к клиентским требованиям корпус, коннектор, опции монтажа. Малые размеры сенсорного элемента позволяют добиваться малых размеров корпусов, но это зависит от OEM-требований инсталляции.
В производстве находятся и многоосевые устройства, сочетающие датчики угловой скорости и акселерометры в одном корпусе, — сенсорные кластеры, которые обеспечивают входы (например, CAN) ко многим бортовым системам, в различных стандартных конфигурациях, а также в специальных клиентских версиях.
В компании Systron Donner Automotive Division считают, что в будущих автомобилях будут использоваться автомобильные IMU (Inertial Measurement Unit) — одноточечные блоки с 6 степенями свободы, предназначенные для систем VDC, обнаружения rollover, систем навигации и других.
Гироскоп SAR10 компании Infineon
Компания Infineon Technologies SensoNor AS выпускает гироскоп типа vibrating gyro SAR10 с цифровым интерфейсом SPI для автомобильных систем обнаружения крена (±250°/с). SAR10 (рис. 9) включает два кристалла — микромеханическую ячейку и ASIC со смешиванием сигнала, размещенные в стандартном корпусе SOIC.
Для производства микромеханического датчика использована технологическая платформа SensoNor на основе однокристального кремния. SAR10 включает структуру в форме бабочки с двумя массами double mass butterfly с односторонним электростатическим возбуждением и схемой емкостного детектирования.
Принцип работы датчика, основанный на получении силы Кориолиса, состоит в следующем. Масса сенсорного элемента возбуждается, осуществляя угловую вибрацию вокруг своей оси. Входное вращение образует вибрацию, детектируемую вокруг оси, нормальной к оси возбуждения и входной оси.
Для того чтобы гарантировать высококачественную механическую поддержку для MEMS-элемента, используется анодное соединение, с применением специальных разработанных и патентованных технологий, позволяющих точно контролировать давление внутри уплотненной полости.
Для работы гироскопа SAR10 являются важными частоты и формы четырех режимов. При работе датчика активны второй и третий режимы. Второй режим структуры butterfly представляет собой горизонтальный изгиб балок, в котором массы колеблются со смещением фазы в 180° вокруг вертикальной оси. Третий режим— это кручение балок, колеблющихся в противофазе со смещением в 180°. Второй режим является режимом возбуждения и управляет постоянной амплитудой вибрации, тогда как третий режим (детектирования) измеряет угловую скорость. Другие два режима, к которым относится первый, представляющий собой кручение балок при двух синфазно колеблющихся вокруг горизонтальной оси массах, и четвертый режим — вертикальный изгиб балок при колебаниях масс со смещением в 180° вокруг горизонтальной оси, являются нежелательными и представляют собой возможное следствие внешних вибраций. Высокие частоты порядка 30 кГц делают датчик менее подверженным влиянию внешних вибраций.
Интерфейсная ASIC датчика характеризуется работой в режиме замкнутого цикла как при управлении, так и в цикле обратной связи force feedback при детектировании. Принцип работы датчика — емкостной, ASIC измеряет дифференциальные емкости в диапазоне 10–18 Ф. Этот уровень точности соответствует перемещению мембраны порядка нескольких десятков Е.
Принцип работы датчика — емкостной, ASIC измеряет дифференциальные емкости в диапазоне 10–18 Ф. Этот уровень точности соответствует перемещению мембраны порядка нескольких десятков Е.
Выходной интерфейс датчика — SPI. Схема обработки включает также функции управления возбуждением, демодуляцию, фильтрацию сигнала и температурную компенсацию. SAR10 характеризуется меньшим размером, ценой и энергопотреблением. Устойчивость к ударам достигает 10 000 g. Компания SensoNor также предлагает разработчикам оценочный комплект SAR10.
Гироскопы Silicon Sensing Systems
Компания Silicon Sensing Systems использует технологию Silicon Vibrating Structure Gyroscope (SiVSG) — для создания вибрации кольца vibrating ring resonator, вибрационный режим которого изменяется при вращении вследствие действия силы Кориолиса (рис. 10).
Применение керамического колпачка, металлического кольца и использование кристаллических кремниевых и микромеханических методов позволили уменьшить кольцевой резонатор до 6 мм в диаметре.
Кольцевой резонатор дополняется центральным миниатюрным магнитом для создания электромагнитного резонанса. Передача тока осуществляется через металлические дорожки, депонированные на опоры кольца, что создает силу, которая вводит кольцо в резонанс. Движение кольца под действием силы Кориолиса определяется по напряжениям, наводимым в опорах. Таким образом, методы возбуждения и детектирования — электромагнитные.
Кольцевой резонатор устойчив к ударам (99 g). Закорпусированный сенсорный блок позволяет добиваться единичного соотношения высокие объемы производства/низкая цена, что, в свою очередь, дает возможность использовать это устройство вместе с клиентской ASIC.
Будущие разработки компании предполагают использование кремниевых емкостных технологий MEMS (рис. 10ж).
Гироскоп MLX90609 Melexis
В июне 2006 года компания Melexis представила свой первый гироскоп MLX90609 в SMD-корпусе — CLCC32, который включает кремниевую микромеханическую ячейку и схему обработки сигнала с функциями калибровки в EEPROM. Датчик MLX90609 (рис. 11) разработан с целью удовлетворения растущего спроса на автомобильные гироскопы для навигационных систем (dead reckoning GPS). Полный диапазон ±75°/с (MLX90609-N2) программируется при производстве. По специальному заказу доступны диапазоны ±150°/с (MLX90609-E2) или ±300°/с (MLX90609-R2).
Датчик MLX90609 (рис. 11) разработан с целью удовлетворения растущего спроса на автомобильные гироскопы для навигационных систем (dead reckoning GPS). Полный диапазон ±75°/с (MLX90609-N2) программируется при производстве. По специальному заказу доступны диапазоны ±150°/с (MLX90609-E2) или ±300°/с (MLX90609-R2).
MLX90609 выполнен с применением процесса thick SOI (Silicon on Insulator) и включает дифференциальную MEMS-структуру, чувствительную к силе Кориолиса при движении. Каждая часть дифференциальной структуры включает двухфреймовый гироскоп на монокремниевой основе.
MLX90609 формирует два выходных сигнала, пропорциональных с линейностью ±0,5% угловой скорости, действующей перпендикулярно плану ИС, — аналоговое напряжение с выходом в 2,5 В на нулевой угловой скорости и полным диапазоном до 4,5 или 0,5 В, в зависимости от направления вращения, а также SPI-интерфейс.
Пользователю предоставлена возможность калибровки и программирования следующих параметров: температурного дрейфа смещения и усиления, частотной полосы, даты и серийного номера.
Заключение
Гироскопы — третье из самых востребованных применений в MEMS-индустрии интегральных датчиков по объемам продаж (после акселерометров и датчиков давления) и одно из наиболее быстрорастущих в автомобильной сенсорной индустрии. Помимо автоэлектроники, востребованность гироскопов поддерживается и многими другими рынками — клиентским, медицинским, промышленным и военным, что неминуемо означает дальнейшее снижение цены и повышение уровней исполнений этих устройств.
Рассмотренные в статье гироскопы представляют собой базовые типы устройств, на основе которых разрабатываются все новые модификации MEMS. Среди них вибрационные кориолисовы гироскопы с емкостным типом детектирования представляют собой наиболее актуальные сегодня устройства, рекомендуемые для новых проектов. В дальнейшем ожидается повышение спроса как на традиционные резонансные гироскопы с улучшенными рабочими характеристиками — такими как надежность, размер и цена, так и массовая волна коммерциализации новых разработок на основе оптических технологий MEMS.
Независимо от типа применяемой технологии для гироскопов ожидается также дальнейшее повышение уровня интеграции и появление других мультисенсорных многоосевых устройств.
Литература
- Nasiri S. A Critical Review of MEMS Gyroscopes Technology and Commercialization Status. www.invensense.com/shared/pdf/MEMSGyroComp.pdf
- Geen J., Krakauer D. New iMEMS® Angular-RateSensing Gyroscope., ADI Micromachined Products Division. www.analog.com/library/analogDialogue/archives/37-03/gyro.html
- Burg A., Meruani A., Sandheinrich B., Wickmann M. MEMS Gyroscopes and their Applications. clifton.mech.northwestern.edu/~me381/project/done/Gyroscope.pdf
- Watson W. S. Improved Vibratory Gyro Pick-off and Driver Geometry. Watson Industries, Inc. Symposium Gyro Technology. Stuttgart, Germany. Sept. 19, 2006. www.watson-gyro.com/files/gyro_technology_report.pdf
- Shkel A. M. Type I and Type II Micromachined Vibratory Gyroscopes.
 — Mechanical & Aerospace Engineering, University of California, Irvine. www.oxide.eng.uci.edu/publications/IEEE_PLANS_2006_Andrei_Shkel.pdf
— Mechanical & Aerospace Engineering, University of California, Irvine. www.oxide.eng.uci.edu/publications/IEEE_PLANS_2006_Andrei_Shkel.pdf - Xie Y., Li S.-S., Lin Y.-W., Ren Z., Nguyen C. T.-C. UHF Micromechanical Extensional Wine-Glass Mode Ring Resonators. Technical Digest, 2003 IEEE International Electron Devices Meeting, Washington, DC, Dec. 8–10, 2003. eecs.umich.edu/~ctnguyen/Research/…/extWG.iedm03.yxie.ctnguyen.pdf
- Ayazi F., Najafi K. Design and Fabrication of a High-Performance Polysilicon Vibrating Ring Gyroscope., Center for Integrated Sensors and Circuits University of Michigan. Eleventh IEEE/ASME International Workshop on Micro Electro Mechanical Systems. Heidelberg, Germany, Jan. 25–29, 1998. www.eecs.umich.edu/najafi/pdf/Paper_84.pdf
- Micromachined gyros. US Patent 6,122,961. Опубл. Sept. 26, 2000. (Geen, Analog Devices, Inc.)
- Micromachined gyros. US Patent 6,505,511. Опубл. Jan. 14, 2003 (Geen, Analog Devices, Inc.)
- Micromachined gyroscope.
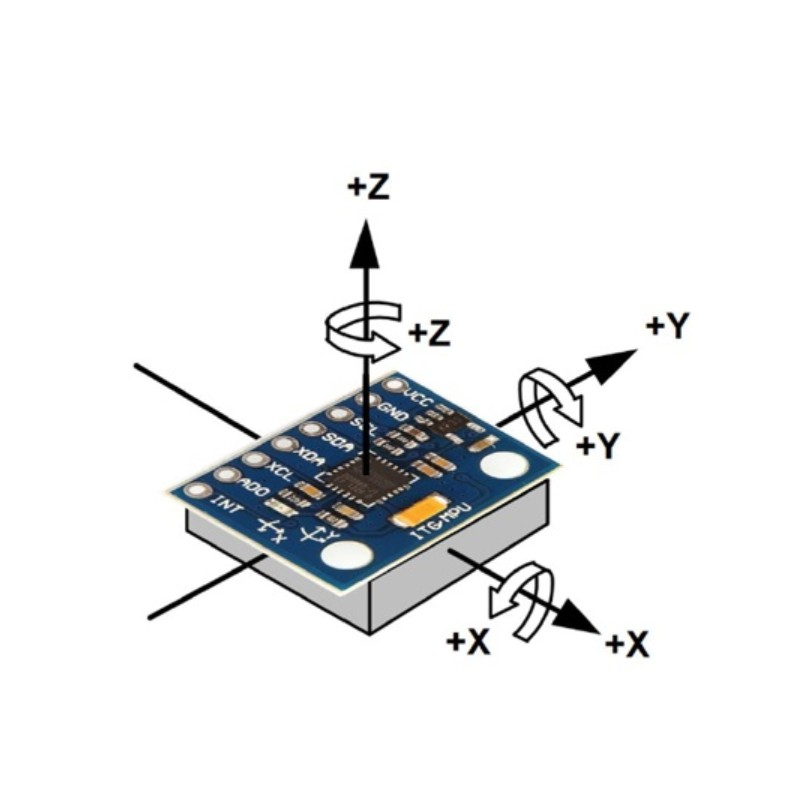 US Patent 6,877,374. Опубл. April 12, 2005. (Geen, Analog Devices, Inc.)
US Patent 6,877,374. Опубл. April 12, 2005. (Geen, Analog Devices, Inc.) - Six degree-of-freedom micro-machined multisensor. US Patent 6,848,304. Опубл. Feb. 1, 2005 (Geen, Analog Devices, Inc.)
- www.analog.com
- Bosch Micromachined Sensorsystems in Series Production. Техническая информация Robert Bosch Corporation, Research and Technology Center.
- www.semiconductors.bosch.de
- www.systronauto.com
- www.infineon.com
- www.spp.co.jp/sssj/
- www.melexis.com
Как работает гироскоп – Телеканал “Наука”
Для успокоения морской качки, передвижении на гироскутере и ориентации картинки в телефоне служат совершенно разные устройства с общим названием
Для успокоения морской качки, передвижении на гироскутере и ориентации картинки в телефоне служат совершенно разные устройства с общим названием — гироскопы. Подборка видеороликов поможет вам разобраться в принципах работы современных систем стабилизации.
Механические гироскопы
Вращение придает объекту стабильность в пространстве, этот принцип используют детский волчок, тарелочка-фрисби и пуля нарезного оружия. Любой из этих предметов можно назвать гироскопом, противодействующим отклонению от оси вращения.
Если вращающийся объект будет закреплен на оси с несколькими степенями свободы, то получится роторный гироскоп. Как только ротор будет раскручен, его ось приобретает устойчивость в пространстве и старается сохранить ориентацию, заданную в начальный момент.
Чем больше масса ротора и скорость его вращения, тем выше способность такого гироскопа сохранять заданное положение главной оси. Так, установка успокоения качки для 10-метровой лодки в сборе весит около 350 кг и имеет ротор, вращающийся со скоростью от 6000 до 10 000 об/мин.
Такие стабилизаторы требуют очень высокой точности изготовления, потребляют значительное количество энергии и издают шум при работе. Все это сказывается на цене и ограничивает их применение в быту. Зато они незаменимы в случаях, когда стабилизируемый объект не имеет возможности опираться на какую-либо поверхность — в воде, воздухе и космическом пространстве.
Электромеханические гироскопы
Моноколеса, стабилизаторы для камер и даже смартфоны также оснащены гироскопами, но их системы работают по совершенно иному принципу. В их основе лежат микроэлектромеханические системы — это микросхемы со встроенным датчиком инерции, которые способны переводить его механические перемещения в электрические импульсы. Общий принцип действия можно понять из следующего ролика.
Управляющие системы по показаниям таких датчиков вычисляют текущее положение объекта и стабилизируют его при помощи электромоторов.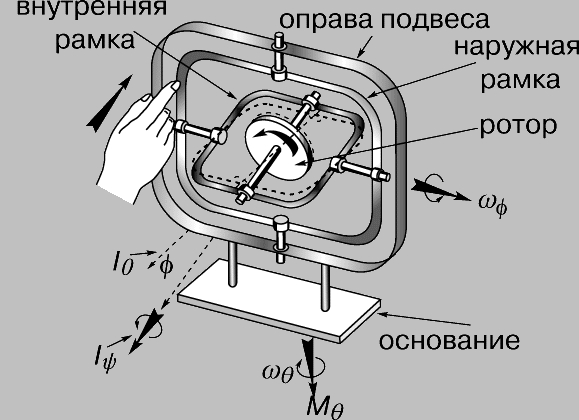 Принцип работы хорошо виден на примере стабилизатора для видеосъемки. При просмотре ролика можно включить субтитры с переводом на русский.
Принцип работы хорошо виден на примере стабилизатора для видеосъемки. При просмотре ролика можно включить субтитры с переводом на русский.
На сайте могут быть использованы материалы интернет-ресурсов Facebook и Instagram, владельцем которых является компания Meta Platforms Inc., запрещённая на территории Российской Федерации
Расскажите друзьям
- Околонаука
Алгоритм сплетников и запор у скорпионов: объявлены победители Шнобелевской премии
- Внеземное
Похоже, ученые наконец разгадали тайну колец Сатурна
- Физика всего
Обнаружены новые фазовые состояния воды
На фестивале «Мир знаний» покажут фильмы телеканалов «Моя Планета» и «Наука»
Исследование: первая летающая рептилия появилась на Земле 260 млн лет назад
Челябинский метеорит, кристаллы
Sergey Taskaev et al./European Physical Journal Plus, 2022
В пыли Челябинского метеорита нашли невиданные ранее кристаллы
Shutterstock
Тайны Черного моря
Shutterstock
Ученые рассказали, какое поведение родителей лучше всего влияет на развитие мозга ребенка
Solar Dynamics Observatory
Орбитальная обсерватория сняла эпическое видео транзита Луны по диску Солнца
Shutterstock
Ученые выяснили, почему «королевы» муравьев живут в 5 раз дольше обычных рабочих
Хотите быть в курсе последних событий в науке?
Оставьте ваш email и подпишитесь на нашу рассылку
Ваш e-mail
Нажимая на кнопку «Подписаться», вы соглашаетесь на обработку персональных данных
Решения | Специальные Системы.
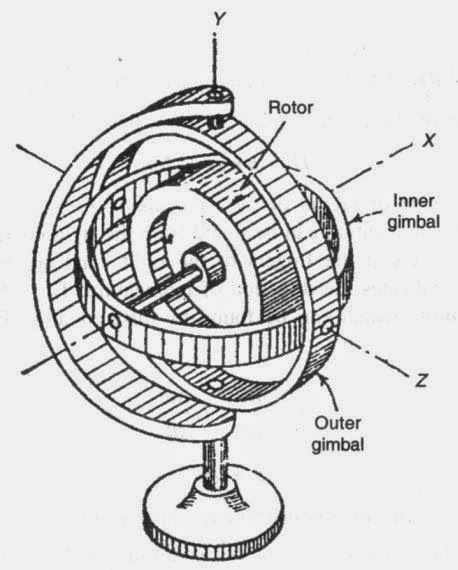 Фотоника
ФотоникаКомпания «Специальные Системы. Фотоника» является специализированным поставщиком и интегратором компонентов волоконно-оптических гироскопов (ВОГ) и оборудования .
Мы всегда рады проконсультировать наших заказчиков и предоставить техническую поддержку. Обращаем Ваше внимание на то, что на базе нашей компании открыт сервисный центр по обслуживанию оборудования, проводятся тренинги и семинары.
Волоконно-оптический гироскоп. Эффект Саньяка
Волоконно-оптический гироскоп – оптико-электронный прибор, служащий для измерения абсолютной относительно инерциального пространства угловой скорости. Принцип действия основан на эффекта Саньяка.
Сущность эффекта: если в замкнутом оптическом контуре в противоположных направлениях распространяются два световых луча, то в неподвижном контуре, изменения фазы обоих лучей, прошедших весь контур, будут одинаковыми; при вращении этого контура вокруг оси, нормальной к его плоскости, изменения фазы отличаются. При этом разность фаз лучей пропорциональна угловой скорости вращения контура.
При этом разность фаз лучей пропорциональна угловой скорости вращения контура.
Следующие преимущества обусловливают популярность и разработку ВОГ:
- Высокая точность;
- Широкий динамический диапазон;
- Малые габариты и масса;
- Малое потребление энергии;
- Отсутствие подвижных механических элементов;
- Малое время перехода в рабочий режим.
Ниже приведена упрощённая оптическая схема волоконно-оптического гироскопа:
Оптическая часть схемы ВОГ
Основными элементами ВОГ являются:
- чувствительный элемент – контур;
- источник излучения;
- фотоприёмник;
- блок обработки сигналов.
Оптические волокна. Катушки волоконно-оптических гироскопов
Существует большое количество различных конструкций ВОГ.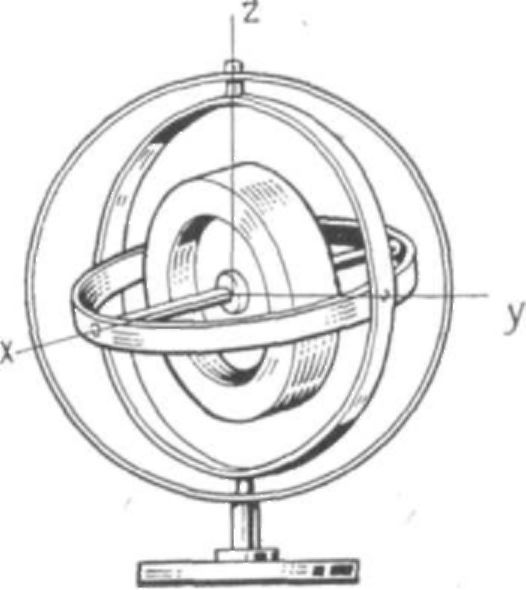 В большинстве из них при производстве контура – катушки, используются двулучепреломляющие (PM) оптические волокна. Основные типы PM волокон приведены ниже:
В большинстве из них при производстве контура – катушки, используются двулучепреломляющие (PM) оптические волокна. Основные типы PM волокон приведены ниже:
Принципиальная схема ОВ с двулучепреломлением, вызванным наведёнными механическими напряжениями,
где а-ОВ типа PANDA; б-ОВ с эллиптичной оболочкой; в-ОВ с напрягающей эллиптичной оболочкой; г-ОВ «галстук-бабочка»
Выбор типа двулучепреломляющего волокна, его геометрических параметров, рабочей длины волны, типа защитного покрытия обусловлено рядом факторов, включающих условия эксплуатации, конструкции ВОГ. Например, стандартное акрилатное покрытие при низких температурах становится более жёстким, что приводит к появлению механических напряжений, ведущих к поляризационным преобразованиям в контуре по причине влияния эффекта фотоупругости. При эксплуатации космических навигационных систем на передний план выходит устойчивость ОВ к ионизирующему излучению.
Наша компания предлагает волокна от ведущих мировых производителей, зарекомендовавших себя в исследованиях, оптимизации параметров и производстве широкой линейки оптических волокон для ВОГ: Fibercore и iXblue Photonics. Минимальный диаметр кварцевой оболочки предлагаемых волокон: 40 мкм, рабочие длины волн: от 850 нм. Доступные конструкции волокон: галстук бабочка, PANDA, эллиптическая напрягающая оболочка, эллиптическая сердцевина. Также в линейке представлены как PM волокна для космических применений, так и в специальных защитных покрытиях.
Катушки PM волокна Fibercore и iXblue Photonics
Поляризующие оптические волокна
Многие производители предпочитают использовать поляризующее оптического волокно при производстве волоконных гироскопов. Компания Fibercore является лидером на рынке волокон такого типа, позволяющие добиться линейной поляризованности излучения более 40 дБ.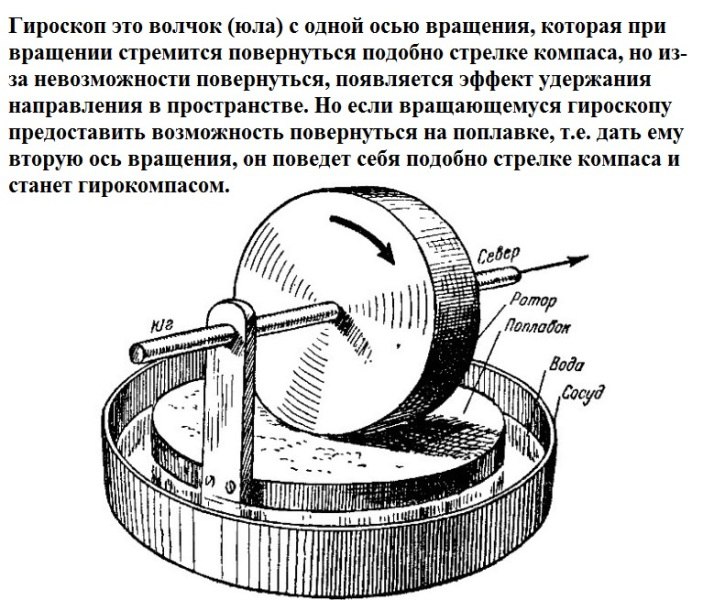
Принцип “отсечения” одной моды в поляризующих волокнах
Активные оптические волокна
При производстве ВОГ разработчики уделяют особое внимание широкополосным источникам излучения. Мы предлагаем широкую линейку Fibercore и iXblue Photonics стандартных и радстойких волокон с различной степенью легирования.
Схема тестирования устойчивости активного волокна к ионизирующему излучению
Намотка катушек волоконно-оптических гироскопов
Нежелательные эффекты, возникающие при температурном воздействии на катушку волоконно-оптического гироскопа частично нивелируются использованием одного из особых методов намотки, например, квадрупольной, октопольной. Правильно выполненная намотка обеспечивает более высокую чувствительность интерферометрической системы. Большое внимание также уделяется нанесению специального адгезива, в случае его использования.
По этой причине намотку катушек ВОГ осуществляют с помощью прецизионных систем, позволяющих с высокой точностью контролировать процесс производства: шаг, натяжение, покрытие затвердевающим составом.
Мы предлагаем популярные и зарекомендовавшие себя с положительной стороны как на отечественном, так и зарубежном рынках автоматические системы намотки. Также производителем оказываются услуги по конструированию и производству каркасов катушек.
Автоматизированная станция для намотки катушек ВОГ KRCAM(F)-230D
Многофункциональные интегрально-оптические схемы (МИОС)
Многофункциональные интегрально-оптические схемы ВОГ выполняют следующие задачи: линейно поляризуют излучение, разветвляют излучение, направляя его во встречных направлениях волоконного контура, модулируют фазу сигнала с заданной частотой. По методу поляризации различают МИОС с поляризатором, сформированным на чипе (обычно в качестве основы используют кристалл ниобата лития), либо с волноводами, изготовленными по технологии протонного обмена.
Мы предлагаем оба варианта от ряда производителей. Обращаем Ваше внимание на то, что доступны как корпусированный, так и некорпусированный варианты исполнения.
Многофункциональная интегрально-оптическая схема
Стыковка МИОС с волокном
Стыковка PM оптических волокон с МИОС, как и с волноводом другого чипа – технологический процесс, требующий точной юстировки положения ОВ, осей двулучепреломления с последующей фиксацией волоконных выводов адгезивом.
Мы также предлагаем системы автоматизированной стыковки от корейской компании FIBERPRO. Эти системы используются рядом ведущих исследовательских учреждений и производителей электрооптических модуляторов.
Автоматизированная станция стыковки волоконных выводов IFA-600
В качестве измерительных приборов, использующихся для выставления положения волокон и определения параметров их сварки, мы предлагаем продукцию компании, всемирно известной своими решениями, в области поляризационных измерений – General Photonics. Это экстинкциометры и измерители распределённых поляризационных преобразования. В случае их использования, сварка должна выполняться оператором в полуавтоматическом или автоматическом режимах.
ERM-202 (General Photonics) и PXA-1000(General Photonics)
PXA-1000 является уникальной, коммерчески доступной системой, функционирование которой основано на интерферометрии белого света. Следует отметить, что это устройство является крайне востребованным со стороны производителей ВОГ и волоконно-оптических датчиков тока, так как позволяет точно измерить преобразование поляризации в каждой точке: в местах сварок, внутри элементов (PM разветвителей, поляризаторов, МИОС), и, что крайне важно, катушек PM волокна.
Принцип проведения измерений PXA-1000
Для определения величины поляризационных преобразований используются приборы, упомянутые выше. Для определения величины оптических потерь мы рекомендуем использовать рефлектометры высокого разрешения LUNA. Разрешение этих систем достигает 10 мкм, что является лучшим показателем на мировом рынке. В случае сборки прецизионных систем его технические возможности незаменимы. Чувствительность рефлектометра составляет -70 дБ, динамический диапазон -130 дБ. Эти параметры обусловливают возможность проанализировать чипы МИОС и катушки ВОГ, даже при наличии сильного отражения Френеля на стыке чип-волокно.
Оптический рефлектометр LUNA OBR4600
Сварка оптических волокон
При производстве ВОГ используется волокно с сохранением поляризации. Мы являемся единственной компанией на российском рынке, предлагающей портативные аппараты для сварки PM волокон, работающие от батареи, что позволяет осуществлять стыковку двулучепреломляющих волокон “в поле”. Сварочные аппараты японского производителя FITEL (Furukawa Electric) являются наиболее экономичным решением на рынке и идеально подходят как для массового производства, так и для проведения опытно-конструкторских работ.
Подробно процесс сварки оптического волокна на примере специальных оптических волокон с сохранением поляризации приведён в описании решения на нашем сайте.
Сварочный аппарат FItel S185PM
Современные сварочные аппараты позволяют работать в автоматическом, полуавтоматическом и ручном режимах. Аппараты по умолчанию поставляются с набором алгоритмов сварки наиболее часто применяемых в мире волокон. В случае, если заказчик использует другие волокна, японская компания FITEL (Furukawa Electric) бесплатно разрабатывает оптимальные алгоритмы для необходимых комбинаций.
Точное фиксирование изменений парарметров интерференционной картины также является одним из факторов сборки ВОГ. Мы предлагаем широкий ряд точных фотоприёмных устройств от ведущих мировых производителей. Среди них стоит выделить EMCORE – компанию, специализирующуюся на решениях в области навигации и передачи сигналов по волоконно-оптическим линиям связи.
Приёмо-передающий модуль EMCORE
Волоконно-оптические компоненты
Пассивные оптические компоненты являются неотъемлемой частью системы ВОГ. Превосходные характеристики и надежность здесь также стоят на первом месте при выборе компонент. Компания DK Photonics предлагает все пассивные компоненты для использования в области производства интерферометрических датчиков:
.
Оптический делитель/ объединитель от DK Photonics
- Оптические делители/объединители поляризации – волоконно-оптический компонент, которая может объединять два поляризованных световых сигнала в одно выходное волокно или делить световой поток на два поляризованных потока, ортогональных друг другу.
- Оптические разветвители – волоконно-оптический компонент для разделения оптического сигнала на два с разным коэффициентом деления.
Разница между акселерометром и гироскопом — производство печатных плат и сборка печатных плат
Производство бытовой электроники с каждым годом растет все быстрее. В результате люди стали лучше понимать, как технологии могут им помочь. Одним из популярных устройств, которые находятся на подъеме, являются акселерометр и гироскоп. Важнейшим элементом этих устройств становятся микроэлектромеханические системы (МЭМС). Они дают пользователю новый способ взаимодействия со своим устройством. Они также обнаруживают движение устройства и взаимодействуют с ним по-новому.
Эти устройства полезны для потребительского и промышленного рынков. Среди них автомобильная и аэрокосмическая промышленность. Здесь МЭМС может обнаруживать движение в автомобилях, кораблях и самолетах. Мы также можем использовать эти датчики для определения скорости и направления. Это повысит общую эффективность этих продуктов. МЭМС полезны в блоках управления подушками безопасности, боковых подушках безопасности и датчиках занятости сидений. Мы также используем их в интеллектуальных круиз-контроллерах в автомобильной промышленности. Акселерометр и гироскоп также полезны в игровых консолях. Это пример бытовой электроники. Микрочип обрабатывает информацию, предоставленную этим устройством, прежде чем отправить ее на консоль или игровую платформу.
Акселерометр — это устройство, используемое для определения ускорения свободно падающего объекта. Он состоит из массы, пружины и рычага. Они подвешивали массу к рычажному механизму, который можно заменить из исходного положения. Если объект ускоряется вертикально, подвешенная масса будет двигаться в противоположном направлении. Смещение этой массы измеряет, какое ускорение испытывает объект.
Акселерометр определяет ускорение объекта. Мы можем использовать акселерометр во многих различных приложениях. Обычно он используется природой, потому что некоторые организмы используют его для обнаружения гравитации или земного притяжения. Некоторые научные учреждения используют их для измерения скорости вращения и космического ускорения. Некоторые силы заставляют эти устройства работать. К ним относятся гироскопы, инерциальные векторные индикаторы (IVI), MEMS и магнитометры.
Запросить стоимость изготовления и сборки печатных плат
Как это работает Акселерометр и гироскоп Arduino Объект свободно падает и опускается под действием силы тяжести. Через определенное время объект достигнет определенной скорости (это зависит от веса объекта). Ускорение свободного падения будет равно g. Затем на массу действует физическая сила, заставляющая ее замедляться. Акселерометр следит за замедлением. Он измеряет изменение количества движения, вызванное этой силой — эта сила изменяется, когда на нее действует ускоряющая сила.
Акселерометр также работает с эффектом пьезоэлектрического эффекта. Кристалл со связанными атомами будет создавать электрический заряд, когда вы его сжимаете. Если вы сожмете его, он будет генерировать напряжение. Подключение этого устройства заставит его работать как акселерометр.
Магниторезистивный эффект:Акселерометр также состоит из магниторезистивного эффекта. Он чувствует небольшое магнитное поле. Таким образом, он обнаруживает ускорение, вызванное магнитными силами.
Изменение емкости:
В определенных приложениях акселерометр измеряет изменения емкости. Таким образом, происходит изменение емкости при свободном падении. 2 емкостные пластины присутствуют. Катушка и конденсатор соединяют их. Прибор наблюдает за изменением емкости. Мы можем использовать его, чтобы определить, что объект падает.
Акселерометры зависят от других принципов работы. Мы используем их в бытовой электронике, автомобилестроении и аэрокосмической промышленности.
Акселерометр — одно из самых популярных устройств MEMS. Мы можем использовать его для обнаружения вибрации, ударов и небольших изменений направления движения объекта. Кроме того, это очень эффективное устройство, так как при его использовании требуется мало энергии. Поэтому вы можете оставить его включенным надолго, не разряжая аккумуляторы устройства.
Микроэлектромеханические системы (МЭМС) являются ключевым элементом акселерометров. Они измеряют ускорение, вращение и вибрацию. Измеряем ускорение по изменению положения пробной массы. Пробная масса находится вместе с резонансной структурой.
Наиболее широко используемым типом акселерометра является емкостной электромеханический датчик. Поэтому мы также называем его акселерометром.
Акселерометры обычно состоят из сенсорного чипа и интегральной схемы. В нем есть конденсаторы, катушки индуктивности и резонаторы (настроенные цепи с резонансными частотами).
Микросхема датчика может быть традиционной КМОП, кремниевой КМОП или другой технологией.
Прибор использует эффект пьезоэлектрического эффекта для измерения ускорения. Прибор наблюдает за изменением емкости.
Применение AccelerometersМы используем акселерометры в различных приложениях, включая:
1. Приложения Compass/Map: в GPS Navigation System если устройство находится в движении. Он также определит, в каком направлении он движется. С помощью датчиков на основе осей телефоны и планшеты могут определять свою ориентацию и направление.
Используя гироскоп, мы можем использовать акселерометр для определения ориентации устройства. Например, в iPhone используются акселерометр и гироскоп. Во-первых, он определяет, когда пользователь поворачивает телефон из портретного режима в ландшафтный. Затем он соответствующим образом меняет приложения.
3. Обнаружение землетрясений:Мы используем акселерометры для обнаружения землетрясений. Он также определяет величину его движения.
4. Датчик падения:Мы используем акселерометры в передовых системах индивидуальной защиты. Они обнаруживают падение и активируют спасательные технологии, например, подушки безопасности и ремни безопасности.
5. Медицинские приборы: Мы используем акселерометры для определения мгновенной скорости кровообращения. Он также предоставляет важную информацию о состоянии пациента. Искусственные части тела, такие как сердечные клапаны и бедра, также имеют акселерометры. Они помогают обнаружить движение вокруг протеза.
Акселерометры определяют физическую активность. Это может определить, идет ли пользователь, бежит или едет на велосипеде.
7. Игры и приложения:Мы используем акселерометры для обнаружения незначительных движений во время игры — например, время отклика джойстика.
8. Автомобильные приложения:Акселерометры определяют, теряет ли водитель контроль над автомобилем. Затем он запускает соответствующую реакцию безопасности.
Что такое гироскоп? Гироскоп — это устройство, которое использует свою естественную инерцию для измерения скорости вращения объекта. Мы считаем это механическим воздействием. Мы используем гироскопы в геофизических космических исследованиях и различных приложениях электроники.
Гироскоп состоит из двух основных частей:
Пара утяжеленных колец, называемых гироскопами
Датчик угловой скорости (обычно называемый магнитометром), который мы не используем.
Работает за счет эффекта прецессии, когда гироскоп вращается вокруг одной из своих осей. Он не может определить угол поворота, когда он находится в положении равновесия. Но после своего вращения он будет указывать на ось, на которой вы его разместили.
В этом случае на гироскоп действует сила инерции. Поскольку угловой момент остается постоянным, с этим движением будет уходить дополнительная кинетическая энергия. Эта сила заставит гироскоп двигаться назад. Однако, поскольку с гироскопом ничего не происходит, мы называем это прецессией. Другой эффект прецессии заключается в том, что гироскоп будет сопротивляться любому изменению его углового момента, пока вы не примените крутящий момент.
Скорость вращения инерциальной системы отсчета может измерять скорость вращения объекта в ускоряющей системе отсчета. Это достигается с помощью принципа эквивалентности Эйнштейна или первого закона движения Ньютона.
В основном мы используем гироскопы для навигации, управления полетом и навигации при исследовании космоса. Тем не менее, они также полезны для медицинских устройств. Примером могут служить кардиомониторы и другое медицинское оборудование. Спектрометры ядерного магнитного резонанса (ЯМР) также используют гироскопы для обнаружения движения.
Гироскоп MEMSГироскоп MEMS также известен как гироскоп микроэлектронно-механической системы (MEMS). Мы используем двигатель MEMS в смартфонах и камерах.
Мы используем гироскопы в смартфонах для стабилизации изображения. Это помогает захватывать четкие изображения во время записи видео.
Мы также используем его в дронах, использующих технологию MEMS. Даже когда дрон не находится под непосредственным контролем человека, они позволяют управлять полетом.
МЭМС-гироскопы представляют собой небольшие миниатюрные датчики. Они используют кремниевые чипы, МЭМС и передовые технологии обработки для достижения высокой точности. Мы используем их в различных приложениях, включая гироскопы, камеры и навигационные системы.
Применение гироскопа
В прошлом мы использовали гироскопы MEMS в навигационных системах миссий. Тем не менее, приложение расширяется. Некоторые из них включают:
1. Потребительская электроника с помощью МЭМС-гироскопов:Спрос на МЭМС растет в бытовой электронике, особенно в смартфонах и планшетах.
Это связано с тем, что большинство современных смартфонов и планшетов оснащены 3-осевым гироскопом.
Гироскопы могут определять, слишком ли сильно перемещается устройство. Например, при аварии сработает система подушек безопасности. Если он обнаружит резкое падение на землю, он вызовет экстренных служб с помощью GPS.
2. Инерциальные системы наведения
Инерциальные системы наведения необходимы в ракетах, ракетах, космических кораблях и БПЛА.
Инерциальная система наведения может определять положение и ориентацию в пространстве.
3. Самолеты через МЭМС-гироскопы:
3-осевой МЭМС-модуль служит важным компонентом. Он включает ось крена системы управления полетом по проводам (FBW). Эта технология позволяет пилотам летать на сверхзвуковых скоростях.
4. Устойчивость транспортных средств, мотоциклов, кораблей:
МЭМС-гироскопы позволяют определять характеристики поперечной и продольной устойчивости транспортного средства. Мы можем использовать его для оценки состояния шасси автомобиля. Мы также используем стабильность в автомобилях. Например, он определяет, теряет ли автомобиль равновесие или становится неустойчивым при движении по извилистой дороге.
5. Космические станции:
МЭМС-гироскопы и акселерометры помогают определить ориентацию, скорость и направление космической станции.
Запросить производство и сборку печатных плат
Как выбрать акселерометр Комбинация гироскопа и акселерометра Акселерометры помогают в системах захвата движения, игровых контроллерах и Kinect. Все они могут измерять изменения в движении. Мы делаем это с помощью акселерометра, измеряющего изменения ускорения, вызванные силами, приложенными к устройству.
Акселерометры могут измерять ускорение, вызванное гравитацией, которое мы также можем использовать для обнаружения гравитации. Акселерометр также может измерять статические силы, такие как направленная вниз или направленная вверх сила. Но он не может обнаруживать динамические силы, такие как движение и движение во времени. Итак, чтобы найти хороший, вам нужно учитывать следующее:
1. Диапазон:Акселерометры могут измерять ускорение до 5000 g. Поэтому, если вы хотите измерить ускорение с высокой точностью, лучше использовать акселерометр с большим диапазоном. Они включают акселерометр с диапазоном 2G или выше.
2. Интерфейс: Мы можем подключить акселерометры через цифровой или аналоговый. Но чтобы получить максимальную производительность, лучше использовать акселерометр с цифровым интерфейсом.
Чувствительность акселерометра — это величина вертикальной силы, которую он может измерить при изменении ускорения. К сожалению, это также связано с низкой чувствительностью. Таким образом, вы не сможете измерить его точно, если будете ускоряться с постоянной скоростью.
4. Оси:Существует два типа акселерометров, а именно двух- или трехосевые.
Самый распространенный тип акселерометра, который используется сегодня, это тот, который имеет только одну ось. Он выглядит как мини-3-осевой акселерометр. Если вы хотите измерить ускорение с высокой точностью, вам следует выбрать миниатюрный 3-осевой акселерометр. Однако этот тип акселерометра может быть доступен только на нескольких устройствах. Они сложны в изготовлении.
5. Мощность: Масса устройства и размер печатной платы влияют на его чувствительность и энергопотребление. Поэтому, прежде чем выбрать какой-либо акселерометр, вы должны учитывать эти факторы.
Также важно понимать, как использовать акселерометр в устройстве.
7. Стоимость:Прежде чем принять решение об использовании акселерометра в вашем проекте, вы также должны учитывать стоимость. Вы должны знать, что вместо акселерометров можно использовать переключатели Рихтера или наклона. Это когда вы хотите измерить ускорение при небольшом бюджете.
Типы акселерометрова. Grove – 3-осевой цифровой акселерометр со сверхнизким энергопотреблением ±16g (BMA400)
Это продукт датчика BMA400 от Analog Devices. 3-осевой акселерометр Grove BMA400 — это цифровой акселерометр со сверхнизким энергопотреблением. Мы используем его в робототехнике и медицинских устройствах.
б. Трехосевые акселерометры ADXL серии
Существует три различных серии акселерометров на базе BMA200.
ADXL3-03 — маломощный высокопроизводительный 3-осевой аналоговый акселерометр. Он доступен в вариантах 1G и 4G.
Большинство людей считают, что ADXL3-05 является наиболее точным классом с точностью ±5 мкг. Кроме того, он обеспечивает обнаружение увеличения и уменьшения. Он имеет разрешение ±2 мкг на шаг во всем рабочем диапазоне.
Как выбрать гироскопГироскопы помогают в таких устройствах, как автомобили, камеры и дроны. Мы используем их, чтобы улучшить стабильность устройства и измерить скорость.
Гироскопы помогают снизить количество несчастных случаев при опрокидывании и обеспечивают более точные показания скорости.
Вы должны выбирать гироскоп с умом, потому что не у всех одинаковые требования. Так что универсального гироскопа не существует. Это еще больше усложняет вам задачу, если у вас нет предварительных знаний о них.
Вот факторы, которые следует учитывать при выборе подходящего гироскопа:
Диапазон:
Гироскопы могут измерять угловую скорость до 2000 градусов в секунду. Поэтому вам нужно выбрать один с большим диапазоном, например, гироскоп с диапазоном 2000 градусов в секунду или выше.
Диапазон влияет на количество информации, которую вы можете получить от гироскопа. Таким образом, вы должны выбрать тот, который имеет максимально возможный диапазон для вашего проекта.
Цифровые и аналоговые:
Цифровые гироскопы дороже аналоговых. Но с ними проще взаимодействовать и они дают более точные результаты. Таким образом, чтобы получить хорошую производительность, вы должны выбрать аналоговый гироскоп, а не цифровой.
Коэффициент преобразования:
Коэффициент преобразования аналогового гироскопа относится к точности скорости, измеренной в градусах в секунду. Точное измерение скорости гораздо предпочтительнее неточного. Поэтому выбирайте гироскоп с максимально возможным коэффициентом преобразования. Параметрами, определяющими точность гироскопа, являются диапазон, скорость преобразования и температурный коэффициент. Так что вам придется учитывать их при выборе для вашего проекта.
Количество осей:
Два гироскопа одно- и двухосные. Одноосный гироскоп подходит для измерения угловой скорости вокруг одной оси. Мы можем использовать его для таких приложений, как стабилизация. С другой стороны, двухосевой гироскоп необходим для навигации или управления полетом. Поэтому лучше выбрать двухосный, а не одноосный.
Мощность:
Гироскопы потребляют много энергии. Поэтому вам следует выбрать гироскоп с минимально возможным энергопотреблением, если вы хотите измерить угловую скорость, но у вас нет денег на гироскоп высокого класса. Десять мВт намного лучше, чем 0,5 мВт.
Использование:
Мы используем гироскопы во многих устройствах. К ним относятся дроны, спутники и системы управления полетом. Прежде чем выбрать гироскоп для своего проекта, вы должны проверить требования к устройству.
Стоимость:
Вы можете сэкономить много денег, выбрав недорогой гироскоп. Это не так важно, как другие факторы при выборе хорошего.
a. Grove — 6-осевой акселерометр и гироскоп:
BMG160 — это 6-осевой гироскоп и акселерометр в одном корпусе. LIS2MDL3-16000 — маломощный 6-осевой акселерометр и гироскоп с разрешением 16-битного АЦП. Он может измерять угловые скорости с верхним пределом ±2000°/сек
b. Трехосевые гироскопы ADXL
Существует три различных серии аналоговых гироскопов ADXL на основе LS5016AL.
ADXL3-12 — это маломощный высокопроизводительный 3-осевой аналоговый гироскоп общего назначения. Он имеет полную шкалу ± 200 dps.
ADXL3-15 является наиболее точным в своем классе с точностью ±5 мкг/DPS (крен) и ±2,5 µg/DPS (тангаж и рыскание). Кроме того, разрешение остается постоянным во всем рабочем диапазоне.
Коэффициент преобразования ADXL3-15 намного выше, чем у других моделей этой серии. Вот почему мы упомянули об этом.
в. DRV2605L 3-осевой цифровой гироскоп
DRV2605L от Texas Instruments представляет собой цифровой гироскоп. Он использует сенсорную технологию MEMS со встроенным контроллером MSP430.
Приложения, совместимые с этим гироскопом, включают автомобили, робототехнику, системы технического зрения и носимые компьютеры.
Датчик имеет 3 оси, диапазон ±2g/±2g, разрешение 0,01° и полосу пропускания +/-0,1°/с. Потребляет чуть меньше одного мА на ось, при напряжении питания 0,5В.
Запросить предложение по изготовлению и сборке печатных плат
Разница между акселерометром и гироскопомПри анализе этих двух датчиков обнаруживается много общего. Вы обнаружите, что они имеют схожие возможности и приложения. Поэтому довольно сложно определить, какой из них работает лучше.
Этот раздел поможет вам понять разницу между акселерометрами и гироскопами. Затем он поможет вам выбрать правильный датчик для вашего проекта.
Функция:
Мы используем акселерометры для измерения ускорения. С другой стороны, гироскоп может измерять угловую скорость и угловую скорость. Короче говоря, акселерометры чувствуют изменения скорости и направления. Гироскопы определяют скорость вращения.
Гироскопы также известны как гироскопы скорости или датчики вращения. Однако это зависит от их функции.
Он известен тем, что измеряет линейное ускорение, угол и угловое ускорение или вращение. Кроме того, мы можем измерять, комбинируя акселерометр и гироскоп.
Мы называем измерение угла поворота тела с помощью акселерометра измерением угловой скорости. Датчик измеряет изменения наклона вращающегося тела. Это то, что мы называем угловой скоростью, когда он ощущает движение. Эти движения обусловлены гравитацией, ускорением и вращением. Трехосевой акселерометр измеряет изменение наклона.
Линейная скорость измерения является мерой скорости вращения вращающегося тела. Гироскоп определяет угловую скорость, измеряя движение по оси рыскания (тангаж и крен).
Гироскопы для измерения скорости вращения в инерциальных системах навигации и управления полетом.
Роботы также используют гироскопы в качестве датчиков для определения их ориентации и поддержания баланса.
Акселерометры можно рассматривать как мини-гироскопы. Это потому, что они выполняют аналогичные измерения угловой скорости.
Отношение сигнал/шум:
Отношение сигнал/шум – это отношение между уровнем сигнала и уровнем шума, наблюдаемым детекторным устройством.
Чем выше отношение сигнал/шум, тем более чувствителен он к изменениям входного сигнала.
Соотношение сигнал/шум имеет важное значение при выборе датчика. Это потому, что это влияет на его точность и точность. Например, работа с датчиком с низким SNR не будет реагировать на небольшие изменения выходного сигнала.
Гироскоп — очень чувствительный датчик с высоким отношением сигнал-шум для измерения мельчайших изменений. В результате измерения акселерометра ниже, что противоречит цели акселерометра.
Мы создаем инерциальные навигационные системы с использованием гироскопов. Это связано с их чувствительностью к изменению угловой скорости, а не с акселерометрами.
Гироскоп имеет преимущество перед акселерометром при сносе. Это связано с его постоянной погрешностью измерения.
Измерение угловой скорости:
Гироскопы измеряют или воспринимают вращение вращающегося тела. Чтобы получить точное измерение, вы должны установить гироскоп в фиксированной точке, чтобы контролировать направление вращения.
Гироскоп представляет собой электронное устройство. Мы используем его для измерения угловой скорости и применяем к 3D-сканированию, датчикам, навигации и системам управления положением.
Измерение линейной скорости недостаточно для инерциальных систем наведения. Это связано с тем, что космический аппарат может двигаться с высокой скоростью и сохранять ориентацию. Однако мы можем использовать его в системах управления положением, когда транспортное средство неподвижно, для получения информации об ориентации.
Гироскоп имеет несколько режимов, таких как горизонтальный, угловая скорость и дрейф угловой скорости. Каждый тип режима необходим для различных приложений и условий.
Горизонтальный режим:
Основной режим измеряет вращательное движение в восточном или западном направлении, также называемое рысканием. Рыскание может также называться тангажом или креном, в зависимости от того, по какой оси гироскоп определяет вращение.
Заключение
Наконец, правильный выбор датчика зависит от области применения и условий окружающей среды.
Во-первых, нам нужно определить, какой вывод важнее в данном приложении.
Если есть возможность получить необработанные данные с датчика, вам следует приобрести акселерометр поверх гироскопа.
Вы должны выбрать гироскоп вместо акселерометра, если вам нужна высокая точность и точность.
MVP Disc Sports and Circuit Events представляет GYROscope #4: The Matador
Свернуть все разделы
MPO · Open (7)
Cody Bradshaw #58007
Professional
Фредериксбрг, Вирджиния, США
Трэвис Форман #32888
Профессиональный
Мартинсбург, Западная Вирджиния, США
Konrad Pawlosky #29571
Professional
Александрия, Вирджиния, США
Tommy Donelson II #18414
Professional
Берк, Вирджиния, США
Nathan Hughes #78987
Professional
Stephens City, Virginia, United States
Райан Джонс #26497
Профессионал
Уоррентон, Вирджиния, США
Джесси Стоукс #114842
Профессиональный
Манассас, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MP60 · Pro Masters 60+ (2)
Rick Honn #25403
Professional
Silver Spring, Мэриленд, США
Mark Sherwood #14279
Professional
Hyattsville, Мэриленд, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MA1 · Advanced (5)
Austin Kelleher #100733
Professional
Mechanicsvlle, Вирджиния, США
Райан Хаттон #96254
Любитель
Берк, Вирджиния, США
Адам Салливан #85442
Профессиональный
Пасадена, Мэриленд, США
Коннор Галли #73157
Professional
Станция Fairfax, Вирджиния, США
Эван Фрейди #97524
Любитель
Северна Парк, Мэриленд, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
FA1 · Продвинутые женщины (1)
Ingrid Parada #75878
Любители
Аннандейл, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4,939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MA40 · Мастера-любители 40+ (4)
Fernando Melendez #79601
Любители
Сентервилль, Вирджиния, США
Кевин Сильвер Вулф Джонсон #7417
Любитель
Лэнхэм, Мэриленд, США
Майк МакКиттрик #27268
Любитель
Фэрфакс, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4,939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
FA40 · Мастера-любители, женщины 40+ (1)
Линдси Салливан #73389
Любители
Спрингфилд, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MA50 · Мастера-любители 50+ (4)
David Wellborn #46265
Любители
Вудбридж, Вирджиния, США
Крис Капелл #79102
Любитель
Фэрфакс, Вирджиния, США
John Iliff #73985
Любитель
Weirsdale, Флорида, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MA2 · Средний уровень (20)
Энди Эндикотт #100390
Любитель
Хеймаркет, Вирджиния, США
Brian Drop Zone Davidson #93683
Любитель
Маршалл, Вирджиния, США
Рид Мартинко #100671
Любитель
Спрингфилд, Вирджиния, США
Крис Уоткинс #88354
Любитель
Гейнсвилл, Вирджиния, США
Кевин Кит #87984
Любитель
Чарлстон, Южная Каролина, США
Трей Такер #114095
Любитель
Ричмонд, Вирджиния, США
Джерри Манн #
Любительское
Смитфилд, Вирджиния, США
Ян Сервера #
Любитель
Эстеро, Флорида, США
James McLaughlin #95088
Любитель
Charlottesvle, Virginia, United States
Джеймс Аллен #99559
Любитель
Сентервилль, Вирджиния, США
Джошуа Салливан #85443
Любитель
Пасадена, Мэриленд, США
Тайлер Эби #112568
Любитель
Покуосон, Вирджиния, США
J Keagy #112468
Professional
Ричмонд, Вирджиния, США
Крис Ханклер #102497
Любитель
Манассас, Вирджиния, США
Mark Metz #31220
Любитель
Fredericksbrg, Virginia, United States
Аарон Харт #101447
Любитель
Честер, Вирджиния, США
Стивен Труонг #96294
Любитель
Порт-Орчард, Вашингтон, США
Роберт Мишо #45953
Любитель
Александрия, Вирджиния, США
Ричард Флориан #100462
Любитель
Манассас Парк, Вирджиния, США
Джош Уилкинсон #109343
Любитель
Манассас Парк, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MA3 · Отдых (15)
Кевин Карр #103426
Любитель
Берк, Вирджиния, США
William Landay #105191
Любитель
Бристоу, Вирджиния, США
Кен Темплин #50159
Любитель
Спенсервилл, Мэриленд, США
Мэтт Нолан #39914
Любитель
Катлетт, Вирджиния, США
Бретт Олинджер #99638
Любитель
Хеймаркет, Вирджиния, США
Уилл Дебесис #30349
Любитель
Аннандейл, Вирджиния, США
Грегори Гарднер #6524
Любительское
Сентервилль, Вирджиния, США
Nikolas Huist #62989
Любитель
Уэйк Форест, Северная Каролина, США
Noel Duke #80617
Любитель
Уолдорф, Мэриленд, США
Вэнс Уокер #112532
Любитель
Голдвейн, Вирджиния, США
Riki Cusic #113362
Любитель
Уолдорф, Мэриленд, США
Дэвид Сигафу #107207
Любитель
Сентервилль, Вирджиния, США
Тони Родригес #113026
Любитель
Банкер Хилл, Западная Вирджиния, США
Роб Вейк #
Любитель
Александрия, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
MA4 · Новичок (4)
Роберт Старк #98770
Любитель
Перселвилл, Вирджиния, США
Джесси Дьюк #101440
Любительское
Уолдорф, Мэриленд, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
FA4 · Женщины-новички (1)
Габи Сигафу #107188
Любитель
Сентервилль, Вирджиния, США
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4939 футов
Региональный парк Булл-Ран — схема Матадор; 16 отверстий; пар 50; 4,939 футов
Категория продуктовДатчики, акселерометры, гироскопы и магнитометры на Adafruit Industries
Код продукта: 2472
Если вы когда-либо заказывали и подключали датчик с 9 степенями свободы, скорее всего, вы также осознали проблему преобразования данных датчика с акселерометра, гироскопа и магнитометра в реальную «ориентацию в трехмерном пространстве». ! Ориентация — сложная задача. Алгоритмы слияния датчиков (секретный соус, который объединяет данные акселерометра, магнитометра и гироскопа в стабильную…
Product ID: 2019
Так много акселерометров и так мало времени! Мы еще больше расширили наш выбор акселерометров, выпустив этот высокоточный и недорогой трехосевой акселерометр MMA8451 с 14-разрядным АЦП. Вы можете определять движение, наклон и базовую ориентацию с помощью цифрового акселерометра, и MMA8451 — отличный акселерометр для начала. Имеет широкий диапазон использования, от +-2 г до…
Код продукта: 4646
Если вы когда-либо заказывали и подключали 9-Датчик глубины резкости, скорее всего, вы также осознали проблему превращения данных датчика с акселерометра, гироскопа и магнитометра в настоящую «ориентацию в трехмерном пространстве»! Ориентация — сложная задача. Алгоритмы слияния датчиков (секретный соус, который смешивает данные акселерометра, магнитометра и гироскопа в…
Код продукта: 2809
LIS3DH — очень популярный маломощный трехосевой акселерометр. Он недорогой, но имеет почти все «дополнительные» функции, которые вы хотели бы получить от акселерометра: измерение по трем осям, 10-битная точность. ±2g/±4g/±8g/±16g выбираемое масштабирование. И I2C (2 возможных адреса), и варианты интерфейса SPI. Выход прерывания. Несколько вариантов скорости передачи данных от 1 Гц до 5 кГц. Как…
Код продукта: 5579
Ощутите окружающие нас магнитные поля с помощью этого удобного трехосевого магнитометра (компаса). Магнитометры могут определять, откуда исходит самая сильная магнитная сила, обычно используемая для обнаружения магнитного севера, но также могут использоваться для измерения магнитных полей. Этот датчик, как правило, работает в паре с акселерометром/гироскопом с 6 степенями свободы, чтобы создать…
Код продукта: 3886
Я мяу, ты мяу, мы все мяу за ИДУ! MPU-6050 — это то, что мы называем «старым, но хорошим устройством» — этот популярный трехосный акселерометр и гироскоп годами был основным продуктом электронных проектов, и мы наконец-то сделали для него прорыв! Внутри два датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении находится вниз, к. ..
Код продукта: 4438
Вот, ST LSM6DSOX: последний в длинной линейке качественных акселерометр+гироскоп 6-DOF IMU от ST. Этот датчик IMU имеет 6 степеней свободы – по 3 степени линейного ускорения и угловой скорости с различными скоростями в приемлемом диапазоне. Для акселерометра: ±2/±4/±8/±16 г при частоте обновления от 1,6 Гц до 6,7 кГц. Для…
Код продукта: 3387
Добавьте датчики движения, направления и ориентации в свой проект Arduino с помощью этого многофункционального устройства 9-Датчик глубины резкости. Внутри чипа находятся три датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро доска ускоряется в трехмерном пространстве. Другой – 3-осевой магнитометр, который может определить, где…
Product ID: 1231
В дополнение к нашим предложениям акселерометров, у нас теперь есть действительно прекрасный цифровой ADXL345 от Analog Devices, трехосевой акселерометр с цифровым интерфейсом I2C и SPI. Мы добавили встроенный регулятор 3,3 В и схему смещения логического уровня, что сделало его идеальным выбором для взаимодействия с любым микроконтроллером 3 В или 5 В, таким как Arduino. Датчик имеет…
Код продукта: 5543
Добавьте в свой проект Arduino высококачественные датчики движения, направления и ориентации с помощью этого универсального датчика с 9 степенями свободы (9-DoF) и датчиками от ST. Этот небольшой прорыв содержит два чипа, которые расположены рядом друг с другом, чтобы обеспечить 9-градусные данные полного движения. Плата включает в себя ST LSM6DS3TR-C (также известный как LSM6DS3), отличный акселерометр начального уровня с 6 степенями свободы IMU +…
Код продукта: 4097
Компания Analog Devices разработала свою популярную классику ADXL345, предложив практически незаменимую замену ADXL343. Как и оригинал, это трехосевой акселерометр с цифровым интерфейсом I2C и SPI. Он имеет широкий диапазон чувствительности и высокое разрешение, работает с 10- или 13-разрядным внутренним АЦП. Встроенные функции обнаружения движения делают касание,…
Код продукта: 4366
3-осевой магнитометр TLV493D — отличный маленький датчик для обнаружения магнитов в 3D. Фактически, производитель Infineon предполагает, что из него можно сделать джойстик! Вы также можете использовать его для других интересных вещей, таких как обнаружение объектов с прикрепленными магнитами, например, крышки коробки или, может быть, статуи, которая открывает ваше тайное логово, если ее поместить на мантию? TLD493D…
Код продукта: 4517
Добавьте в свой проект Arduino высококачественные датчики движения, направления и ориентации с помощью этого многофункционального устройства 9Датчик степени свободы (9-DoF) с датчиками от ST. Этот небольшой прорыв содержит два чипа, которые расположены рядом друг с другом, чтобы обеспечить 9-градусные данные полного движения. Плата включает в себя LSM6DSOX, акселерометр IMU с 6 степенями свободы + гироскоп. 3-осевой акселерометр может сказать вам. ..
Код продукта: 163
Мы обновили наш любимый трехосевой акселерометр, и теперь он имеет встроенный стабилизатор 3,3 В, что делает его идеальным выбором для сопряжения с микроконтроллером 5 В, таким как Arduino. Этот коммутационный блок оснащен 3 аналоговыми выходами для измерений по осям X, Y и Z на коммутационной плате размером 0,75 x 0,75 дюйма. ADXL335 — новейшая и лучшая разработка компании Analog Devices, известной своими…
Код продукта: 4503
Добавьте датчик движения и ориентации в свой проект Arduino с помощью этого доступного датчика с 6 степенями свободы (6-DoF) и датчиками от ST. Плата включает в себя ST LSM6DS3TR-C, отличный акселерометр начального уровня 6-DoF IMU + гироскоп. 3-осевой акселерометр может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро ускоряется доска…
Код продукта: 4502
Вот, ST ISM330DHCX: промышленное качество Акселерометр + гироскоп 6-DOF IMU (инерциальный измерительный блок) от ST. Этот датчик IMU имеет 6 степеней свободы – по 3 степени линейного ускорения и угловой скорости с различными скоростями в приемлемом диапазоне. Для акселерометра: ±2/±4/±8/±16 г при частоте обновления от 1,6 Гц до 6,7 кГц….
Код продукта: 4634
Добавьте в свой проект датчик движения, направления и ориентации с помощью этого универсального датчика с 9 степенями свободы, готового к STEMMA QT для простого использования plug-n-play. Внутри чипа находятся три датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро доска ускоряется в трехмерном пространстве. Другой…
Код продукта: 1032
Гироскоп — это тип датчика, который может воспринимать скручивающие и вращательные движения. Часто в сочетании с акселерометром вы можете использовать их для трехмерного захвата движения и инерциальных измерений (то есть вы можете определить, как движется объект!). Поскольку эти датчики становятся все более популярными и простыми в производстве, цены на них упали до точка, где вы можете легко позволить себе…
Код продукта: 4479
Почувствуйте окружающие нас магнитные поля с помощью этого удобного трехосевого модуля магнитометра (компаса). Магнитометры могут определять, откуда исходит самая сильная магнитная сила, обычно используемая для обнаружения магнитного севера, но также могут использоваться для измерения магнитных полей. Этот датчик, как правило, работает в паре с акселерометром/гироскопом с 6 степенями свободы, чтобы создать…
Код продукта: 5309
MSA311 — сверхкомпактный и недорогой трехосевой акселерометр. Он недорогой, но имеет почти все «дополнения», которые вы хотели бы видеть в акселерометре: трехосное измерение, 14-битное разрешение. ±2g/±4g/±8g/±16g выбираемое масштабирование. Интерфейс I2C с фиксированным адресом I2C 0x62. Выход прерывания. Несколько вариантов скорости передачи данных от 1 Гц до 500 Гц. Всего лишь…
Код продукта: 4488
Почувствуйте окружающие нас магнитные поля с помощью этого удобного трехосевого модуля магнитометра (компаса). Магнитометры могут определять, откуда исходит самая сильная магнитная сила, обычно используемая для обнаружения магнитного севера, но также могут использоваться для измерения магнитных полей. Этот датчик, как правило, работает в паре с акселерометром/гироскопом с 6 степенями свободы, чтобы создать…
Код продукта: 4692
Вот, ST LSM6DSO32: последний в длинной линейке качественных акселерометров + гироскопов 6-DOF IMU от ST. Этот IMU похож на старшую сестру LSM6DSOX; у него такая же распиновка и прошивка, но компонент акселерометра может достигать 32 г вместо обычных 16 г. Этот датчик IMU имеет 6 степеней свободы – по 3 степени линейного ускорения и углового…
Код продукта: 4413
Знаете ли вы, откуда дует ветер? Теперь вы это сделаете с этим трехосевым модулем компаса акселерометра/магнитометра. Внутри находятся два датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации). Другой – магнитометр, который может определить, откуда исходит самая сильная магнитная сила, как правило…
Код продукта: 4836
Выкопайте этот старый контроллер Wii и используйте его в качестве элегантного контроллера для вашего следующего робота, если хотите. Adafruit Adafruit Wii Nunchuck Breakout Adapter плотно вставляется в разъем Wii и выполняет изменение уровня и регулирование мощности, необходимое для использования контроллера с любым микроконтроллером или микрокомпьютером. Контроллеры Wii используют стандартный интерфейс I2C и…
Код продукта: 1018
Теперь у нас есть расширенная версия любимого трехосевого акселерометра — он даже имеет встроенный регулятор 3,3 В — что делает его идеальным выбором для взаимодействия с микроконтроллером 5 В, таким как Arduino. Этот коммутационный блок оснащен 3 аналоговыми выходами для измерений по осям X, Y и Z на коммутационной плате размером 0,75 x 0,75 дюйма. ADXL326 — новейшая и лучшая модель от Analog…
Код продукта: 2738
Управляйте тем же аппаратным обеспечением, которое используется в космосе… создайте свой собственный Astro Pi с новой Raspberry Pi Sense HAT! Raspberry Pi Sense HAT прикрепляется поверх Raspberry Pi через 40 контактов GPIO для создания «Astro Pi». Sense HAT имеет несколько датчиков на основе интегральных схем, которые можно использовать для различных типов экспериментов, приложений и…
Product ID: 5374
Эй, человек-ракетчик (в одиночестве выжигаешь свой предохранитель), когда-нибудь задумывался, как быстро ты летишь? Акселерометр Adafruit ADXL375 High G — это эпический 3-осевой акселерометр +-200g, который может дать ответ. Вы правильно прочитали, этот акселерометр может измерять силу до 200 г по трем осям измерения (X Y Z) и имеет контакты, которые можно использовать либо как I2C, либо как SPI. ..
Код продукта: 4565
Обновите любую доску Feather с точным датчиком движения с помощью ST 9-DoF IMU, все-в-одном датчике «Крыло». Он оснащен двумя фантастическими датчиками от ST, которые обеспечивают 9-градусные данные полного движения. Плата включает в себя LSM6DSOX, акселерометр IMU с 6 степенями свободы + гироскоп. 3-осевой акселерометр может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как…
Код продукта: 4627
Нетрудно найти акселерометр, способный измерять ускорение до 16g, но если вам нужен акселерометр, способный измерять ускорение еще большего размера, варианты ограничены (ICM20649является отличным датчиком и может измерять до ± 30 г). Войдите в семейство акселерометров LIS331 от ST, включая h4LIS331 и LIS331HH. Как их модель…
Код продукта: 4626
Нетрудно найти акселерометр, способный измерять ускорение до 16g, но если вам нужен акселерометр, способный измерять еще большее ускорение, вариантов немного. Войдите в семейство акселерометров LIS331 от ST, включая LIS331HH. Как следует из номера модели, LIS331 являются близкими родственниками почтенного акселерометра LIS3DH…
Код продукта: 3463
Прорыв NXP Precision 9DoF сочетает в себе два лучших датчика движения, которые мы тестировали здесь, в Adafruit: 3-осевой акселерометр и магнитометр FXOS8700 и 3-осевой гироскоп FXAS21002. Эти два датчика объединяются в хороший комплект с 9 степенями свободы, который можно использовать для определения движения и ориентации. В частности, мы считаем, что этот набор датчиков идеально подходит для AHRS…
Сообщите мне, Adafruit Precision NXP 9-DOF Breakout Board — FXOS8700 + FXAS21002
Код продукта: 4754
Вот он, датчик движения, который вы искали: тот, который просто дает вам непосредственно полезную информацию, не требуя предварительной консультации с доктором наук для изучения тайных искусств Sensor Fusion. BNO085 берет на себя работу многих людей, всю свою карьеру сосредоточенных на том, как получить полезную информацию от датчика прямого движения. ..
Сообщите мне, Adafruit 9-DOF Orientation IMU Fusion Breakout – BNO085 (BNO080) – STEMMA QT / Qwiic
Код продукта: 4464
Большинство акселерометров имеют аналогичный диапазон измерений, которые они могут производить: часто около 2G – 16G. Точно так же большинство гироскопов могут измерять в диапазоне от 250 до 2000 градусов/с. Этого достаточно для многих ситуаций, однако есть много ситуаций, когда этого недостаточно. При измерении таких вещей, как замах в гольфе, удар футбольного мяча или модный гоночный автомобиль…
Сообщите мне, Adafruit ICM-20649 Широкий диапазон ±30g ±4000dps 6-DoF IMU – STEMMA QT / Qwiic
Код продукта: 4554
Если вы хотите определить ориентацию с помощью инерциальных измерений, вам понадобится инерциальный измерительный блок, а когда дело доходит до IMU, чем больше степеней свободы, тем лучше! ICM20948 от Invensense объединяет 9 степеней свободы в маленьком корпусе, что делает его универсальным магазином для всех необходимых вам степеней свободы! В его тонком корпусе размером 3×3 мм находится не один кристалл МЭМС-датчика, как ваш. ..
Сообщите мне, Adafruit TDK InvenSense ICM-20948 9-DoF IMU (обновление MPU-9250) – STEMMA QT / Qwiic
Код продукта: 4569
Обновите любую доску Feather с помощью точного датчика движения с помощью ST 9-DoF IMU, универсального датчика «Wing. Он оснащен двумя фантастическими датчиками от ST, которые обеспечивают 9-градусные данные полного движения. ST ISM330DHCX — это промышленный акселерометр + гироскоп с 6-степенями свободы IMU (инерциальный измерительный блок). Этот датчик IMU имеет 6 степеней свободы – по 3 степени линейной…
Сообщите мне, Adafruit ISM330DHCX + LIS3MDL FeatherWing — высокая точность 9-DoF ИДУ
Код продукта: 5156
Дополнительная плата датчика Spresense добавляет к GPS-приемнику 3 типа датчиков, необходимых для обнаружения движения (ускорение, барометрическое давление, геомагнетизм), а также функции декодирования звука высокого разрешения, предоставляемые бортовым компьютером SPRESENSE. Кроме того, разъем Sensor Expansion Connector позволяет добавить более 7 типов датчиков, включая датчики яркости,. ..
Уведомить меня, дополнительная плата датчика для Sony Spresense EVK-701
Код продукта: 4022
Измеряйте окружающие нас невидимые магнитные поля с помощью этого широкодиапазонного магнитометра. MLX
— это широкодиапазонный датчик магнитного поля, который может измерять 16-разрядные значения в диапазоне от ±5 мТл до ±50 мТл по всем трем осям. По сравнению с большинством магнитометров, это дает огромный диапазон, что делает его превосходным для обнаружения магнитов и магнитной ориентации, скорее…
Сообщите мне, широкодиапазонный трехосевой магнитометр Adafruit — MLX
— STEMMA QT
907:35Код продукта: 1413
Снято с производства — вместо него вы можете приобрести ADXL375 — акселерометр с высоким ускорением (+-200 g) с I2C и SPI — STEMMA QT / Qwiic! Обратите внимание: срок службы ADXL377 истек, поэтому мы настоятельно рекомендуем вместо него использовать ADXL375 — ADXL375 также является трехосным +-200g, но представляет собой цифровой акселерометр с интерфейсами I2C и SPI вместо аналогового выхода. У нас есть Arduino и Python…
Дополнительная информация, ADXL377 – Трехосевой акселерометр с высоким ускорением (аналоговый выход +-200g)
907:35Код продукта: 4480
Добавьте датчик движения и ориентации в свой проект Arduino с помощью этого доступного датчика с 6 степенями свободы (6 степеней свободы) и датчиками от ST. Плата включает в себя LSM6DS33, акселерометр IMU с 6 степенями свободы + гироскоп. 3-осевой акселерометр может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро доска ускоряется в трехмерном пространстве. 3-осевой…
Дополнительная информация, Adafruit LSM6DS33 6-DoF Accel + Gyro IMU – STEMMA QT / Qwiic
Код продукта: 4485
Снято с производства — вместо этого вы можете получить Adafruit LSM6DS3 + LIS3MDL — Precision 9 DoF IMU! Добавьте датчик движения, направления и ориентации в свой проект Arduino с помощью этого универсального датчика с 9 степенями свободы (9-DoF) и датчиками от ST. Этот небольшой прорыв содержит два чипа, которые расположены рядом друг с другом, чтобы обеспечить 9 градусов полных данных о движении. Плата включает LSM6DS33,…
Дополнительная информация, Adafruit LSM6DS33 + LIS3MDL – 9 DoF IMU с Accel / Gyro / Mag – STEMMA QT Qwiic
Код продукта: 1714
Этот инерциальный измерительный блок сочетает в себе 2 датчика самого высокого качества, доступных на рынке, чтобы предоставить вам 9 осей данных: 3 оси данных акселерометра, 3 оси гироскопических и 3 оси магнитных (компас). Мы протестировали множество различных «комбинированных» датчиков и пришли к выводу, что они обеспечивают наилучшее соотношение цены и качества со стабильными и надежными показаниями. Гироскоп L3DG20H + LSM303DLHC…
Дополнительная информация, Adafruit 9-DOF IMU Breakout – L3GD20H + LSM303
Код продукта: 5158
Снято с производства — вы можете вместо него взять Adafruit 9-DOF LSM9DS1 Breakout Board — STEMMA QT / Qwiic! Мы нашли несколько LSM9DS0, оставшихся после того, как мы перестали использовать этот чип (мы перешли на LSM9DS1), и решили, что, учитывая продолжающуюся нехватку чипов, некоторые люди могли бы использовать их для прототипирования или очень малых тиражей. Как только мы распродаем, мы больше не будем его продавать, и часть…
Дополнительная информация, Чип датчика LSM9DS0 9-DoF IMU
Код продукта: 1604
Этот инерциальный измерительный блок сочетает в себе 3 датчика самого высокого качества, доступных на рынке, чтобы предоставить вам 11 осей данных: 3 оси данных акселерометра, 3 оси гироскопические, 3 оси магнитные (компас), барометрические давление/высота и температура. Мы протестировали множество различных «комбинированных» датчиков и пришли к выводу, что они обеспечивают наилучшее соотношение цены и качества со стабильными и надежными показаниями.
Дополнительная информация, Adafruit 10-DOF IMU Breakout – L3GD20H + LSM303 + BMP180
Product ID: 2020
Добавьте датчики движения, направления и ориентации в свой носимый проект FLORA с помощью этих высокоточных датчиков с 9 степенями свободы. Внутри находятся три датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро доска ускоряется в трехмерном пространстве. Другой — 3-осевой магнитометр, способный определять…
Дополнительная информация, Акселерометр/гироскоп/магнитометр FLORA 9-DOF – LSM9DS0 – v1.0
Код продукта: 345
Wii Nunchuck оказался отличным приобретением — переключатели, джойстик и акселерометр в одном удобном корпусе! Но жалко отрезать разъем, чтобы использовать его, поэтому используйте переходник для коммутационной платы Solarbotics Nunchucky! Особенности Nunchucky: Два набора интерфейсных накладок. Включает 4-контактный штыревой разъем. Заблокируйте пазы, чтобы ваш нунчак «защелкнулся» и не…
Дополнительная информация, Nunchucky (переходник Wii Nunchuck)
Product ID: 1746
Он сказал тебе: “Иди на Запад, молодой производитель!” – но вы не знаете, где Запад! Ах, если бы у вас был этот трехосный компасный модуль магнитометра. Магнитометр может определить, откуда исходит самая сильная магнитная сила, обычно используемый для обнаружения магнитного севера. Мы основывали этот прорыв на популярном и всеми любимом магнитометре HMC5883L. Этот компактный датчик использует I2C для…
Дополнительная информация, Плата трехосевого магнитометра (компаса) — HMC5883L
Код продукта: 2021
Добавьте датчик движения, направления и ориентации в свой проект Arduino с помощью этого универсального датчика с 9 степенями свободы. Внутри чипа находятся три датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро доска ускоряется в трехмерном пространстве. Другой – 3-осевой магнитометр, который может определить, где…
Дополнительная информация, Adafruit 9-DOF Accel/Mag/Gyro+Temp Breakout Board — LSM9ДС0
Код продукта: 4344
Снято с производства — вместо него вы можете приобрести трехосевой акселерометр Adafruit MSA311 — STEMMA QT / Qwiic! MSA301 — сверхкомпактный и недорогой трехосевой акселерометр. Он недорогой, но имеет почти все «дополнения», которые вы хотели бы видеть в акселерометре: трехосное измерение, 14-битное разрешение. ±2g/±4g/±8g/±16g выбираемое масштабирование. Интерфейс I2C…
Дополнительная информация, Трехосевой акселерометр Adafruit MSA301 – STEMMA QT / Qwiic
Код продукта: 1120
Снято с производства — вместо него вы можете приобрести Adafruit LSM303AGR Акселерометр-Магнитометр — STEMMA QT Qwiic! Он сказал тебе: “Иди на Запад, молодой производитель!” – но вы не знаете, где Запад! Ах, если бы у вас был этот трехосевой модуль компаса акселерометра/магнитометра. Внутри два датчика, один из которых представляет собой классический 3-осевой акселерометр, который может подсказать, в каком направлении вниз…
Дополнительная информация, Плата трехосевого акселерометра + магнитометра (компаса) — LSM303
Код продукта: 3085
Экран для реквизита с датчиками движения для Teensy 3.2 и Teensy-LC предназначен для создания интерактивных световых и звуковых эффектов на небольшом переносном реквизите и костюмах! Подходит для всех видов проектов и разработан создателем Teensy, поэтому вы знаете, что он будет хорошо поддерживаться. Датчики движения — обеспечивают интерактивный свет и звук при движении. Усилитель звука — чистый…
Дополнительная информация, PJRC Prop Shield с датчиком движения для Teensy 3.2 и Teensy-LC
907:35Код продукта: 1247
Добавьте датчики движения и направления в свой носимый проект FLORA с помощью этого высокоточного 3-осевого датчика акселерометра и компаса. Внутри находятся два датчика, один из которых представляет собой классический 3-осевой акселерометр, который может сказать вам, в каком направлении вниз к Земле (путем измерения гравитации) или как быстро доска ускоряется в трехмерном пространстве. Другой магнитометр, который может чувствовать…
Дополнительная информация, датчик акселерометра/компаса FLORA – LSM303 – v1.0
Замена сенсорных плат гироскопа Hover-1 Nomad
Автор: Сэмюэл Фрейзи (и 5 других участников)
- Избранное: 0
- Завершений: 4
Сложность
Умеренная
Шаги
9
Необходимое время
10–15 минут
Секции
2
- Внешняя оболочка 4 шага
- Сенсорные платы гироскопа 5 шагов
Флаги
0
- Кочевник BackHover-1
- Полный экран
- Опции
- История
- Скачать PDF
- Редактировать
- Перевести
- Встроить это руководство
Введение
Если у вашего Hover-1 Nomad серьезные проблемы с электричеством, одна из плат датчиков гироскопа может быть повреждена. Вы можете следовать этому руководству, чтобы удалить и заменить две печатные платы в Nomad. Печатные платы управляют датчиками, двигателями, освещением и динамиком ховерборда.
В целях безопасности разрядите аккумулятор ниже 25 %, прежде чем разбирать ховерборд. Это снижает риск опасного теплового события, если батарея случайно повреждена во время ремонта.
Детали не указаны.
Сломайте две гарантийные наклейки, проткнув их отверткой или оторвав их.
Удалите следующие двадцать винтов, вращая отвертку против часовой стрелки:
org/HowToDirection”>
Восемь винтов Phillips #2 16,2 мм
Восемь 15-мм винтов с крестообразным шлицем № 2
Четыре винта Phillips #2 19,1 мм
Отверстия, содержащие большинство винтов, глубокие и узкие. Отверткой со сменными битами до них не добраться.
Не перетягивайте винты во время сборки. Чрезмерно затянутые винты могут сломать пластиковые каналы, крепящие корпус к раме ховерборда.

С помощью нейлоновой лопатки отделите металлическую ручку от внешней оболочки.
Поверните металлическую ручку к центру ховерборда, чтобы освободить пластину от удерживающих зажимов.
Снимите ховерборд с металлической ручки.
Повторите для ручки с другой стороны ховерборда.
Редактировать
Редактировать
Отсоедините следующие провода, нажав на язычки разъемов и вытащив вилки из разъемов:
Провода зарядного порта
Провода сборки динамика
org/HowToDirection”>
Провода кнопки питания
Провода фар
От другой печатной платы необходимо отсоединить только провода фары.
Убедитесь, что провода подключены к нужным портам на печатной плате во время повторной сборки.
Разрежьте кусачками две стяжки вокруг жгута проводов.
Хомут плотно прилегает к проводам. Будьте осторожны, чтобы не задеть и не перерезать провода при снятии стяжки.
Не протыкайте и не разрезайте литий-ионный аккумулятор. Особенно с такой большой батареей, батарея может загореться или взорваться при повреждении.
Редактировать
Отсоедините следующие провода, соединяющие печатные платы с датчиками и двигателями:
org/HowToDirection”>
Отсоедините белые разъемы, нажав на язычок и потянув разъемы вверх.
Отсоедините черные разъемы, потянув за две стороны.
Отсоедините зеленый, желтый и синий кабели, оттянув пластиковый экран и раздвинув концы.
Редактировать
Редактировать
Редактировать
Редактировать
Редактировать
Почти готово!
Чтобы собрать устройство, следуйте этим инструкциям в обратном порядке.
Заключение
Чтобы собрать устройство, следуйте этим инструкциям в обратном порядке.
Отменить: я не завершил это руководство.
4 других человека завершили это руководство.
Автор
с 5 другими участниками
Значки: 12
+9 еще значков
Команда
Введение в вибрационные гироскопы MEMS
Гироскоп — это датчик, который измеряет скорость вращения объекта. Работа гироскопов может быть загадкой для многих инженеров.
Имея это в виду, а также вдохновившись статьей Analog Devices, в этой статье делается попытка дать более подробное объяснение теории вибрационных гироскопов МЭМС. Поскольку тщательный анализ может потребовать больших математических вычислений, мы попытаемся рассмотреть особую ориентацию датчика, чтобы максимально упростить обсуждение.
Положение вращающегося объекта в полярной системе координат
Положение вращающегося объекта легче описать с помощью полярной системы координат. Предположим, что, как показано ниже на рисунке 1, объект всегда находится в плоскости XY.
Рис. 1. Пример объекта на плоскости XYZ.
При изменении θ точка A вращается вокруг оси z. Вы можете вспомнить из уроков математики, что единичные векторы $$\hat{r}$$ и $$\hat{\theta}$$ определены для полярной системы координат, как показано на рисунке 2, чтобы однозначно указать точку в плоскость XY.
Рис. 2. Пример полярной системы координат.
Поскольку предполагается, что объект всегда находится в плоскости XY, на приведенном выше рисунке используется 2D-представление. Положение объекта $$\overrightarrow{P_A}$$ теперь можно описать следующим образом:
$$\overrightarrow{P_A}=r\hat{r}$$
Уравнение 1.
Приведенное выше уравнение может сбивать с толку, поскольку оно не относится к углу θ. Однако обратите внимание, что единичный вектор $$\hat{r}$$ не является фиксированным вектором и его ориентация зависит от θ.
Скорость вращающегося объекта — нахождение производной по времени
Скорость объекта можно найти, взяв производную по времени от вектора положения. Применяя правило произведения к уравнению 1, мы получаем:
$$\overrightarrow{V_A}=\frac{\text{d}}{\text{d}t} \big (\overrightarrow{P_A}\big ) = \ frac {\ text {d} r} {\ text {d} t} \ hat {r} + r \ frac {\ text {d} \ hat {r}} {\ text {d} t} $ $
Уравнение 2.
Первый член учитывает очевидный момент: если мы оставляем θ постоянным, мы все еще можем изменить положение объекта, изменив его расстояние от начала координат на Δr, как показано на рисунке 3. В этом случае скорость должна иметь радиальную компонента, т.е. в направлении $$\hat{r}$$.
Рис. 3. Изменение положения объекта при изменении его расстояния.
Второй член уравнения 2 учитывает тот факт, что положение объекта может измениться из-за вращения, даже если расстояние от начала координат постоянно. Помните, что хотя $$\hat{r}$$ имеет длину 1, его ориентация зависит от θ и может меняться со временем. На рис. 4(а) показано, как изменится положение, если оставить r постоянным и увеличить угол на Δθ.
Рис. 4. Пример изменения положения при постоянном r и увеличении угла на Δθ (а) и нахождение этого изменения (б).
Чтобы найти изменение в $$\hat{r}$$, мы можем провести $$\hat{r_2}$$ из начала координат $$\hat{r_1}$$, как показано на рис. 4. (б). Угол между этими двумя векторами равен Δθ. Предполагая, что Δθ очень мало, простые геометрические формулы дают величину изменения $$\hat{r}$$ как:
$$\lvert \Delta \шляпа{r} \rvert=\шляпа{r_2}-\шляпа{r_1} \приблизительно \lvert {\шляпа{r_1}} \rvert \Delta \theta = \Delta \theta$ $
Разделив обе части на интервал времени Δt, в котором происходит изменение, и взяв предел, получим:
$$\lvert\frac{\text{d}\hat{r}}{ \text{d}t}\rvert= \lim_{\Delta t \rightarrow 0} \frac{\lvert \Delta \hat{r} \rvert}{\Delta t} = \lim_{\Delta t \rightarrow 0 } \frac{\Delta \theta}{\Delta t} = \frac{d \theta}{dt}$$
Это дает нам величину производной. Поскольку мы работаем с векторными значениями, нам также нужно найти направление вектора. Как видно из рисунка 4(b), при очень малом значении Δθ $$\frac{\text{d}\hat{r}}{\text{d}t}$$ находится в направлении $$\шляпа{\theta}$$.
Таким образом, имеем:
$$\frac{\text{d}\hat{r}}{\text{d}t}=\frac{\text{d}\theta}{\text {d}t}\hat{\theta}$$
Уравнение 3.
$$\overrightarrow{V_A}= \frac{\text{d}r}{\text{d}t}\шляпа{r}+r\frac{\text{d}\theta}{\text {d}t}\hat{\theta}$$
Уравнение 4.
Ускорение вращающегося объекта
Взяв производную уравнения 4, мы можем найти ускорение объекта как:
2
$$\overrightarrow{A_A}=\frac{d}{dt} \Big ( \frac{\text{d}r}{\text{d}t}\шляпа{r}+r\frac{\ text{d}\theta}{\text{d}t}\hat{\theta} \Big )$$
92}\шляпа{r} + \frac{dr}{dt}\frac{\text{d}\theta}{\text{d}t}\hat{\theta}$$ Уравнение 6.
Первый член в правой части этого уравнения является математическим выражением очевидного факта. В нем говорится , что для данного θ объект может иметь радиальное ускорение, если вторая производная r отлична от нуля. Однако второй член уравнения обнаруживает интересное явление: если расстояние объекта от начала координат r изменяется при его вращении вокруг оси z, объект испытывает ускорение в направлении $$\hat{\theta}$$.
Вибрационные гироскопы используют это явление для измерения угловой скорости путем включения массы, которая постоянно вибрирует. Когда датчик вращается, масса отклоняется в зависимости от скорости изменения θ. Измеряя отклонение массы, можно определить угловую скорость объекта. Мы обсудим это более подробно ниже.
А как насчет второго члена уравнения 5?
Дифференцируя этот член, мы получаем три условия ускорения:
92 \hat{r}$$ Уравнение 7.
Первый член снова приводит к явлению, которое мы обсуждали выше: если расстояние объекта от начала координат изменяется, когда он вращается вокруг оси z, объект испытывает ускорение в направлении $$\hat{\theta}$$.
Второе слагаемое также дает тангенциальную составляющую ускорения; однако этот член создается только тогда, когда вторая производная θ отлична от нуля. В практических применениях гироскопических датчиков этот член считается равным нулю, поэтому мы будем игнорировать его в оставшейся части статьи. 92 \Big ) \шляпа{r} + \Big ( 2\frac{dr}{dt}\frac{\text{d}\theta}{\text{d}t} \Big ) \hat{\theta} $$
Понимание уравнений
Касательный член в уравнении 8 является ключевым для работы вибрационного гироскопа. Давайте более подробно рассмотрим, как создается этот термин. На рис. 5 показана траектория шарика, движущегося по спице вращающегося колеса.
Рисунок 5. Пример, показывающий траекторию шарика вдоль вращающейся спицы колеса.
Бортик движется по спице с постоянной скоростью u, т. е. радиальное расстояние от начала координат |r| равно ут. Угловая скорость колеса представлена как:
$$\frac{d\theta}{dt}$$
Угловая скорость постоянна и равна ⍵. Черные векторы показывают положение шарика после последовательных интервалов времени Δt, что соответствует изменению угла Δθ. Из уравнения 4 мы знаем, что вектор скорости в данный момент времени имеет радиальную составляющую:
$$v_{r}=\frac{dr}{dt} = u $$
А также тангенциальная составляющая:
$$v_{\theta} = r\frac {d\theta}{dt} = r\omega$$
На рис. 5 показаны эти компоненты скорости для положений A5, A6 и A7. В нашем примере величина радиальной составляющей постоянна, но как насчет тангенциальной составляющей?
Поскольку ⍵ постоянна, тангенциальная составляющая скорости увеличивается с ростом r. Другими словами, по мере того, как мы удаляемся от начала координат, шарик должен пройти большее расстояние за заданный интервал времени и Δθ. Вы можете ясно увидеть это, сравнив расстояние между последовательными векторами положения.
Другой вопрос, как быстро может измениться тангенциальная скорость из-за этого явления?
Для данного ⍵ скорость изменения тангенциальной скорости, дающая тангенциальную составляющую ускорения, равна скорости изменения r. Следовательно, одна составляющая тангенциального ускорения определяется как:
$$A_{1} = \frac{dr}{dt} \times \omega = \frac{dr}{dt} \times \frac{d \theta}{dt}$$
Это дает нам первый член в правой части уравнения 7. В целом, эта составляющая ускорения создается изменениями величины тангенциальной составляющей скорости $$v_{\theta } = г\омега$$. Есть еще один механизм, приводящий к тангенциальной составляющей ускорения: изменение направления радиальной составляющей скорости:
$$v_{r} = \frac{dr}{dt} = u$$
Хотя величина этого члена в нашем примере постоянна, его направление зависит от времени. На рис. 5 видно, как направление единичного вектора $$\hat{r}$$ меняется со временем. Из уравнения 3 мы знаем, что скорость изменения $$\hat{r}$$ равна:
$$\frac{d\theta}{dt}\hat{\theta}$$
Следовательно, изменение направления радиальной скорости $$v_{r}=\frac{dr}{dt}$$ приводит ко второй тангенциальной составляющей ускорения:
$$A_{1} = V_{r}\times\frac{d}{dt}(\hat{r})=\frac{dr}{dt}\times\frac{d\theta} {dt}$$
Таким образом, полная тангенциальная составляющая ускорения объекта, вращающегося с угловой скоростью ⍵, определяется выражением:
$$A_{\theta} = 2 \times \frac{dr }{dt} \times \frac{d\theta}{dt} = 2 \times \frac{dr}{dt}\times \omega$$
Базовая структура МЭМС-гироскопа
На рис. 6 показана Основная конструкция вибрационного гироскопа.
Рис. 6. Пример конструкции вибрационного гироскопа.
Масса (м) связана с «внутренней рамой» через демпферно-пружинную конструкцию. Более того, привод, управляемый системой положительной обратной связи (не показан выше), используется для приведения массы в гармоническое колебание. Система обратной связи гарантирует, что масса находится в регулируемом непрерывном колебании вдоль оси x, как показано на рисунке. Более того, внутренняя рама соединена с «рамкой датчика» через вторую демпферно-пружинную конструкцию в точке 9.0° относительно направления колебаний массы. Эта конфигурация позволяет внутренней раме двигаться в направлении оси Y, когда в этом направлении присутствует сила.
Как мы увидим в следующем разделе, структура, показанная на рисунке 6, может определять угловую скорость, когда датчик вращается вокруг оси, перпендикулярной плоскости XY, изображенной на рисунке.
Как работает вибрационный гироскоп?
Предположим, что, как показано на рис. 7, гироскоп закреплен на платформе, которая вращается против часовой стрелки.
Рис. 7. Гироскоп на неподвижной платформе, вращающийся против часовой стрелки.
На рисунке показан датчик в два разных момента времени. Хотя расстояние пакета датчика от центра платформы фиксировано, мы знаем, что расстояние массы изменяется от r 1 до r 2 из-за его колебаний в направлении x рамки датчика. В этом примере массовое расстояние увеличивается r 2 > r 1 .
Как и в примере с буртиком, показанном на рис. 5, контрольная масса испытывает тангенциальное ускорение в положительном направлении оси Y датчика. В направлении Y контрольная масса жестко связана с внутренней рамой. Следовательно, такое же ускорение применяется и к внутренней раме. Внутренняя рама; однако изначально имеет тенденцию оставаться в состоянии покоя, что изменяет относительное положение внутренней рамки относительно рамки датчика.
Это относительное смещение, пропорциональное входной угловой скорости, может быть измерено несколькими способами, такими как метод емкостного измерения, который мы обсуждали в предыдущей статье об акселерометрах. Таким образом, гироскопы можно описать как резонатор в направлении движения и как акселерометр в направлении восприятия.
Чтобы увидеть полный список моих статей, пожалуйста, посетите эту страницу.
Все, что вы хотели знать о гироскопах
Гироскопы, на первый взгляд, довольно странные объекты. Они двигаются своеобразным образом и, кажется, бросают вызов гравитации. Особые свойства этих устройств сделали их незаменимыми в самолетах, на космических станциях и во множестве других технологий, связанных со вращением.
Типичный самолет часто имеет их полный набор, включая крайне важный компас. Космическая станция «Мир» на самом деле использовала 11 из них, чтобы сохранять ориентацию относительно Солнца, и у телескопа «Хаббл» их тоже несколько.
Что такое определение гироскопа?
Согласно Оксфордскому словарю английского языка, гироскоп — это «устройство, состоящее из колеса или диска, установленного таким образом, что оно может быстро вращаться вокруг оси, которая сама может свободно менять направление. На ориентацию оси не влияет наклон крепления».
Несмотря на то, что это отличное определение, оно не объясняет, как они работают или почему они так важны (при условии, что мы немного сократили определение). Чтобы лучше понять это, нам сначала нужно взглянуть на их «странное поведение».
Секреты мастерства
Гироскопы в своей простейшей форме представляют собой вращающееся колесо или диск на оси. Более сложные образцы также будут установлены на металлической раме или наборе подвижных или неподвижных рам (или шарниров) для повышения точности устройства.
Хотя на первый взгляд они кажутся простыми объектами, они могут проделывать очень странные трюки.
Когда колесо не вращается, гироскопы фактически представляют собой пресс-папье, сделанные с переделкой. Если вы попытаетесь встать, он просто упадет (очевидно). Ключ к ним в их вращении.
Источник : Gordon Joly/FlickrВозможно, в детстве вы играли с гироскопами? Может быть, у вас есть спиннер? Если да, то вы помните, как они могут выполнять множество интересных трюков. Например, вы можете балансировать на струне или пальце во время движения.
Еще одно заметное их свойство, если вы когда-либо держали его в руках, заключается в том, что он будет сопротивляться попыткам изменить свою позицию.
Вы даже можете наклонить его под углом, когда он подвешен на подставке, и он будет парить в воздухе, хотя и вращаясь вокруг подставки. Еще более впечатляюще то, что вы можете поднять гироскоп с помощью веревки на одном конце.
Как работают гироскопы?
Объяснение этого явления сложно понять интуитивно. Их способность, казалось бы, бросать вызов гравитации является продуктом углового момента, на который влияет крутящий момент на диске, подобно гравитации, для создания гироскопической прецессии вращающегося диска или колеса.
Это явление также известно как гироскопическое движение или гироскопическая сила, и оно оказалось очень полезным для нас, людей. Эти термины относятся к тенденции вращающегося объекта, а не только гироскопа, сохранять ориентацию своего вращения.
Таким образом, вращающийся объект обладает угловым моментом, как упоминалось ранее, и его необходимо сохранить. Из-за этого вращающийся объект будет сопротивляться любому изменению оси вращения, поскольку изменение ориентации приведет к изменению углового момента.
Другой замечательный пример прецессии происходит и с планетой Земля. Как вы знаете, ось вращения Земли на самом деле лежит под углом к вертикали, которая, благодаря своему углу, очерчивает окружность при вращении самой оси вращения.
Самые популярные
Хотя это и не совсем относится к этой статье, причина странного наклона Земли на самом деле довольно интересна.
Этот эффект тем сильнее, чем быстрее вращается диск или колесо, как предсказывает второй закон Ньютона. Это кажется довольно очевидным любому, у кого есть базовые знания физики.
Основная причина, по которой они, кажется, не поддаются гравитации, заключается в том, что эффективный крутящий момент, приложенный к вращающемуся диску, влияет на его вектор углового момента. Влияние силы тяжести на плоскость вращающегося диска приводит к «отклонению» оси вращения.
Источник : H. M. Dixon/Wikimedia CommonsЭто приводит к тому, что вся ось вращения находит «золотую середину» между влиянием гравитации и собственным вектором углового момента. Теперь помните, что устройство гироскопа удерживается от падения к центру тяжести чем-то на пути — например, вашей рукой, рамой / подвесом или столом.
Теперь, принимая во внимание тот факт, что гироскоп удерживается от падения по направлению к центру тяжести, что-то на пути приводит к удивительным свойствам, которые мы наблюдаем в этих устройствах.
Изображение — ну, видео — стоит тысячи слов, поэтому мы посвятим более подробное объяснение следующему видео:
Гироскоп и акселерометр: в чем разница между ними?
Чтобы полностью ответить на этот вопрос, нам нужно оценить, как работает каждое устройство. Поскольку мы уже подробно рассмотрели гироскоп выше, давайте посмотрим, что такое акселерометр и как он работает.
Акселерометр определяется в словаре Merriam Webster как «прибор для измерения ускорения или обнаружения и измерения вибраций».
Отлично, но это не дает нам много информации. Акселерометры, в самом общем смысле, представляют собой электромеханические устройства, измеряющие силы ускорения — отсюда и название.
Эти силы могут быть статическими (например, сила тяжести) или динамическими (вызванными перемещением или вибрацией устройства). Существуют различные способы изготовления акселерометра, в большинстве из которых используется либо пьезоэлектрический эффект, либо емкостное измерение.
Первые, как правило, состоят из микроскопических кристаллических структур, на которые воздействуют ускоряющие силы и которые в свою очередь генерируют напряжение. В последнем используются две микроструктуры, расположенные рядом друг с другом.
Каждая из них имеет определенную емкость, и по мере того, как ускоряющие силы перемещают одну из структур, ее емкость будет изменяться. Добавив некоторую схему для преобразования емкости в напряжение, вы получите очень полезный маленький акселерометр.
Источник: Misko/FlickrСуществует еще больше методов, включая использование пьезорезистивного эффекта, пузырей горячего воздуха и света, и это лишь некоторые из них. Итак, как видите, акселерометры и гироскопы — это действительно очень разные звери.
По сути, основное различие между ними заключается в том, что один может ощущать вращение, а другой нет. Поскольку гироскопы работают по принципу углового момента, они идеально подходят для определения ориентации объекта в пространстве.
Акселерометры, с другой стороны, могут измерять только линейное ускорение на основе вибрации.
Тем не менее, есть некоторые варианты акселерометра, которые также включают гироскоп. Эти устройства состоят из гироскопа с грузом на одной из его осей.
Устройство будет реагировать на силу, создаваемую грузом, когда он ускоряется, путем интегрирования этой силы для получения скорости.
Что такое оптические гироскопы?
Другой формой гироскопа является оптический гироскоп. Это устройство не имеет движущихся частей и обычно используется в современных коммерческих реактивных лайнерах, ракетах-носителях и орбитальных спутниках.
Кольцевой лазерный гироскоп, Источник: Encyclopedia BritannicaИспользуя преимущество так называемого эффекта Саньяка, эти устройства используют лучи света для обеспечения функции, аналогичной механическим гироскопам. Эффект был впервые продемонстрирован в 1911 году Францем Харрисом, но правильно определил причину французский ученый Жорж Саньяк.
Если пучок света разделить и направить в двух противоположных направлениях по замкнутому пути на вращающейся платформе с зеркалами по периметру, а затем эти лучи рекомбинировать, они будут проявлять интерференционные эффекты. В 1913 Саньяк пришел к выводу, что свет распространяется со скоростью, не зависящей от скорости источника.
Он также обнаружил, что, несмотря на то, что оба луча находятся в замкнутом контуре, луч, движущийся в одном направлении вращения, достигает своей начальной точки немного позже, чем другой.
Согласно Encyclopedia Britannica, «в результате была обнаружена картина «краевой интерференции» (чередование светлых и темных полос), которая зависела от точной скорости вращения поворотного стола».
Правило правой руки
Ученые обычно используют так называемое «правило правой руки», чтобы визуализировать это.
Для этого возьмите правую руку и сделайте прямой угол. Затем можно растянуть пальцы по радиусу колеса.
Если вы согните кончики пальцев в направлении вращения, ваш большой палец будет указывать в направлении углового момента. По сути, ось колеса будет направлением, в котором «хочет» двигаться все вращающееся колесо.
Источник: останови голубя!/Flickr Это видео дает нам довольно простое объяснение с использованием велосипедного колеса с подвеской.
Применение гироскопов
Интересные свойства гироскопов предоставили ученым и инженерам несколько интересных приложений. Их способность сохранять определенную ориентацию в пространстве является фантастической для некоторых приложений.
Добавьте несколько датчиков, и вы получите рецепт полезности. Имея это в виду, вот несколько замечательных примеров использования гироскопов в нашем современном мире.
1. Вы найдете множество гироскопов в самолетах
Источник: Алекс Бельтюков/Wikimedia CommonsВ современных самолетах инерциальные системы наведения хорошо используют эти относительно простые устройства. У них есть набор вращающихся гироскопов для контроля и управления ориентацией самолета в полете. Вращающиеся гироскопы хранятся в специальных клетках, что позволяет им сохранять свою ориентацию независимо от ориентации самолета.
Клетки гироскопа имеют электрические контакты и датчики, которые могут передавать информацию пилоту всякий раз, когда самолет кренится или качается. Это позволяет пилоту и системам наведения «знать» текущую относительную ориентацию самолета в пространстве.
2. Марсоход также имеет пару гироскопов
Марсоход также имеет набор гироскопов. Они обеспечивают устойчивость вездехода, а также помогают в навигации. Они также применяются в беспилотных самолетах и вертолетах для обеспечения стабильности и помощи в навигации.
3. Крылатые и баллистические ракеты также используют гироскопы. Используемые для автоматического управления и корректировки крена, тангажа и рыскания датчики-гироскопы использовались для этой цели со времен немецких ракет Фау-1 и Фау-2 во время Второй мировой войны.
Как правило, для этой цели ракеты несут как минимум два гироскопа, каждый из которых обеспечивает фиксированную опорную линию, от которой можно рассчитать любые отклонения. Одна ссылка имеет тенденцию включать ось вращения вертикального гироскопа.
От этой оси можно легко измерить отклонения по тангажу, крену и рысканию. Гироскопы также нашли свое применение в стабилизаторах прицелов, бомбовых прицелах и платформах для размещения орудий и радиолокационных систем на борту военных кораблей.
4. Гироскопы также можно найти на орбитальных кораблях
Еще одним интересным применением гироскопов являются инерциальные системы наведения орбитальных космических аппаратов. Такое маленькое судно требует высокой степени точности, когда дело доходит до стабилизации, и гироскопы идеально подходят для этой работы.
Существуют более крупные и тяжелые устройства, называемые импульсными колесами или реактивными колесами, которые также используются для контроля высоты некоторых более крупных спутников.
5. Часть «Звездных войн: Возвращение джедая» снимали с помощью гироскопов
Источник: VidGames/YouTube Устройство под названием «Стедикам» использовалось для съемки определенных сцен в фильме «Звездные войны: Возвращение джедая » (а также во многих других фильмах). Это устройство, используемое в сочетании с несколькими гироскопами, стабилизировало камеру при съемке фоновых кадров знаменитой погони на спидербайках на Эндоре.
Изобретенный Гарретом Брауном, он управлял буровой установкой, чтобы пройти через секвойный лес, управляя камерой со скоростью один кадр в секунду . Когда отснятый материал был ускорен до 24 кадра в секунду , это создавало впечатление высокоскоростного путешествия по деревьям.
Сегодня потомки стедикама являются обычным явлением во многих кинопроизводствах.
6. Возможно, в вашем телефоне тоже есть один
В последние несколько лет гироскопы также используются в различных потребительских товарах. Включение их в портативные устройства, такие как смартфоны, позволяет очень точно определять движение в трехмерном пространстве.
Гироскопы обычно сочетаются с акселерометрами в современных смартфонах, чтобы обеспечить превосходное определение направления и движения. Известные примеры включают Samsung Galaxy Note 4, HTC Titan, iPhone 5s и т. д. От Wii Remote до различных периферийных устройств Playstation 3 и 4, гироскопы открыли совершенно новый способ играть в компьютерные игры.
7. Чтобы не забыть о дронах
Источник: PexelsЕще одно интересное применение гироскопов в нашей повседневной жизни — это дроны. Чтобы эти устройства идеально летали, им требуются гироскопы, среди прочего, чтобы они могли зависать и летать горизонтально.
В современных коммерческих дронах, как правило, используются трех- и шестиосевые гироскопические стабилизаторы для предоставления навигационной информации контроллеру полета, что делает полеты дронов проще и безопаснее.
И это все, ребята.
Несмотря на простоту конструкции, они стали неотъемлемой частью всего, от океанских кораблей до космических шаттлов и, конечно же, вертолетов.
В общем, гироскопы довольно невероятны, даже если вы не понимаете, что они существуют.