
3.2 Структурные схемы оптических гироскопов
На рис. 3.3 приведены общие схемы систем, разработанных для повышения точности измерений. Кольцевой лазерный гироскоп (рис. 3.3, а) отличается высокой частотой световой волны — до нескольких сотен терагерц. Волоконно-оптический гироскоп на (рис. 3.3, б) имеет высокую чувствительность, благодаря использованию длинного одномодового оптического волокна с низкими потерями. В оптическом гироскопе пассивного типа с кольцевым резонатором (рис. 3.3, в) используется острая резонансная характеристика резонатора.
Рис. 3.3 – Структурные схемы гироскопов на эффекте Саньяка
r и l – частота генерации света с правым и левым вращением; – время, необходимое для однократного прохождения светом кольцевого оптического пути; FSR – полный спектральный диапазон
На
рис. 3.3 приведена оптическая схема
волоконно-оптического гироскопа. По
сути это интерферометр Саньяка (см. рис.
3.1), в котором круговой оптический контур
заменен на катушку из длинного одномодового
оптического волокна. Часть схемы,
обведенная штриховой линией, необходима
для повышения стабильности нулевой
точки.
3.3 приведена оптическая схема
волоконно-оптического гироскопа. По
сути это интерферометр Саньяка (см. рис.
3.1), в котором круговой оптический контур
заменен на катушку из длинного одномодового
оптического волокна. Часть схемы,
обведенная штриховой линией, необходима
для повышения стабильности нулевой
точки.
Рис. 3.4 – Принципиальная оптическая схема волоконно-оптического гироскопа
Таким образом, разность фаз между двумя световыми волнами, обусловленная эффектом Саньяка
(3.6)
где N — число витков в катушке из волокна; L — длина волокна; а — радиус катушки.
Следует обратить внимание на то, что в основные формулы не входит коэффициент преломления света в волокне.
Благодаря
совершенствованию технологии производства
выпускается волокно с очень низкими
потерями. Чтобы не повредить волокно,
намотка производится на катушку радиусом
несколько сантиметров. При этом не
наблюдается сколько-нибудь заметного
увеличения потерь. Можно создать
сравнительно малогабаритный и
высокочувствительный интерферометр
Саньяка с катушкой небольшого радиуса
(2…5 см), намотав на нее волокно большой
длины. Сформировав оптимальную оптическую
систему, можно измерять с высокой
точностью изменения фазы (в инерциальной
навигации — порядка 10
Чтобы не повредить волокно,
намотка производится на катушку радиусом
несколько сантиметров. При этом не
наблюдается сколько-нибудь заметного
увеличения потерь. Можно создать
сравнительно малогабаритный и
высокочувствительный интерферометр
Саньяка с катушкой небольшого радиуса
(2…5 см), намотав на нее волокно большой
длины. Сформировав оптимальную оптическую
систему, можно измерять с высокой
точностью изменения фазы (в инерциальной
навигации — порядка 10
Поскольку данный волоконно-оптический гироскоп — пассивного типа, в нем отсутствуют такие проблемы, как явление синхронизма.
Пределы
обнаружения угловой скорости. В основной оптической системе на (рис.
3.3) в состоянии оптические пути для света
в обоих направлениях обхода будут
одинаковы по длине, а поскольку сигнал
на выходе светоприемника изменяется
пропорционально
,
то гироскоп нечувствителен к очень
малым поворотам.
(3.7)
Рис.3.5, а. Чувствительность волоконно-оптического гироскопа при дробовом шуме светоприемника при оптимальной длине волокна | Рис.3.5, б. Чувствительность волоконно-оптического гироскопа при дробовом шуме светоприемника при разной длине световой волны |
Результаты
расчета при типичных значениях параметров
приведены на рис. 3.5, а. Для оптического
волокна с потерями 2 дБ/км пределы
обнаружения примерно 10-8 рад/с (0,001/ч).
В реальных волоконно-оптических гироскопах возможности ограничены шумовыми факторами.
Исследование азимутального гироскопа направления (гироагрегат ГА-6)
Машиностроение \ Испытания и техническое обслуживание систем стабилизации, ориентации и навигации
УТВЕРЖДАЮ
Директор ЦНИИ «Электроприбор»
академик РАН
___________________В.Г.Пешехонов
“_____”__________________2005 г.
Исследование азимутального гироскопа направления (гироагрегат ГА-6)
Методические указания по выполнению лабораторной работы №1
Авторы: Л.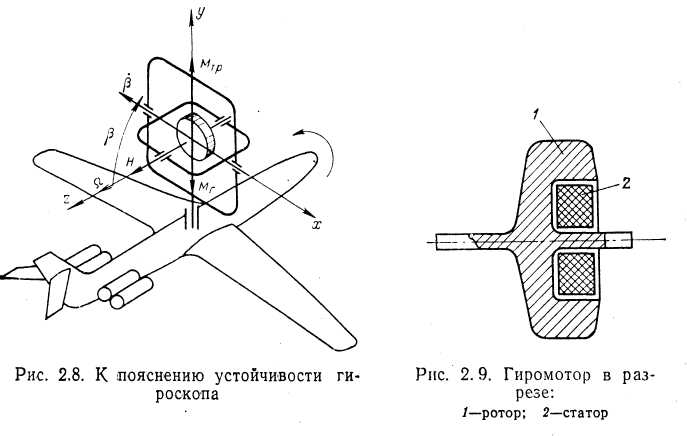 А. Северов,
В.К. Пономарев
А. Северов,
В.К. Пономарев
Санкт-Петербург
2006
Цель работы: ознакомление с принципом действия, устройством и электрической схемой азимутального гироскопа направления (гироагрегатаГА-6), а также экспе-риментальное исследование основных инструментальных погрешностей и методических ошибок прибора при работе в составе авиационной курсовой системы ГМК-1.
Азимутальные гироскопы направления относятся к группе курсовых гироскопов и используются для измерения отклонений летательного аппарата по курсу относительно опорной системы координат. В авиации гироскопы направления применяются в качестве автономного измерителя или входят в состав курсовых авиационных систем, где работают совместно с другими датчиками курса. В первом случае их называют гирополукомпасами, во втором – именуют гироагрегатами.
Принципы
действия азимутальных гироскопов направления основаны на свойствах гироскопа с
тремя степенями свободы сохранять положение оси вращения ротора неизменным в
пространстве, а так же прецессировать под воздействием управляющих моментов
относительно внутренней и наружной осей подвеса.
Основные характеристики гироскопа направления можно выявить на основе уравнений прецессии гироскопа, которые при учете введенных углов ориентации будут иметь вид [1]
, (1)
где – кинетический момент гироскопа, – проекции угловой скорости вращения корпуса прибора на оси ротора без учета его вращения (оси Резаля), и – моменты внешних сил, действующих вокруг осей карданова подвеса.
Принимая внимание расположение прибора на борту летательного аппарата угловые скорости и можно выразить через угловые скорости летательного аппарата в связанных осях
(2)
С другой стороны, вектор угловой скорости летательного аппарата является суммой вектора угловой скорости опорной системы координат (в связанных осях) и вектора вращения летательного аппарата относительно опорной системы координат
| |||||||
| |||||||
где –
матрица ориентации связанной с летательным аппаратом системы координат относительно
опорной системы.
Компоненты матрицы находятся по формулам
(3)
где , , – углы рысканья, тангажа и крена летательного аппарата.
В качестве опорной системы координат обычно выбирают нормальную ортодромическую систему, в которой ось – направлена по вертикали от центра Земли, а оси и – лежат в горизонтальной плоскости, причем – направляется вдоль линии заданного пути (ЛЗП), то есть по касательной к ортодромическому экватору.
В этом случае
;
;
(4)
где – угловая скорость вращения Земли, – широта места, – угол поворота ортодромии относительно меридиана, R – радиус Земли, – ортодромическая широта.
Если азимутальный гироскоп направления установлен неподвижно на земной поверхности, то , и
(5)
С учетом выражений (5) уравнения прецессии гироскопа направления (1) перепишутся в виде:
Отсюда
(6)
Как видно, под
воздействием внешних возмущающих моментов и вращения Земли наблюдается
непрерывное движение наружной и внутренней рамок гироскопа. При этом, если
вращение наружной рамки не отражается на функциональных способностях прибора,
то вращение внутренней рамки ведет к опасности потери его работоспособности в
результате сложения рамок (лишения одной степени свободы).
При этом, если
вращение наружной рамки не отражается на функциональных способностях прибора,
то вращение внутренней рамки ведет к опасности потери его работоспособности в
результате сложения рамок (лишения одной степени свободы).
Для исключения возможности сложения рамок в гироскопах направления используют систему горизонтальной или межрамочной коррекции. Наибольшее распространение на практике получила система горизонтальной коррекции, которая реализуется путем установки на внутренней рамке (гироузле) чувствительного к отклонению от плоскости горизонта жидкостного маятникового переключателя и датчика момента размещенного по наружной оси подвеса. При наличии отклонения главной оси гироскопа от плоскости горизонта сигнал с маятникового переключателя подается на датчик момента вызывая прецессию гироскопа относительно внутренней оси. В ходе прецессии гироузел приходит в исходное положение, при котором и . Если это условие выполняется точно, то движение наружной рамки относительно корпуса будет описываться более простым уравнением
.
Среди внешних возмущающих моментов наибольшее влияние на уход гироскопа направления по курсу оказывает остаточный момент несбалансированности и момент трения по внутренней оси подвеса . Для компенсации видимого ухода гироскопа и уходов инструментального характера в гироскопах направления применяют систему азимутальной коррекции, работа которой в одном из вариантов ее реализации основана на создании управляемой прецессии гироскопа в точности равной его уходу под воздействием возмущающих факторов. Управляемая прецессия создается с помощью датчика момента размещенного по внутренней оси подвеса гироскопа, а требуемая величина напряжения , подаваемого на датчик момента, в зависимости от широты места и суммарной величины момента несбалансированности и момента трения, вырабатывается в пульте управления гирополукомпаса или курсовой системы
ОШИБКА – 404 – НЕ НАЙДЕНА
- Главная
- ЭТО ЛОВУШКА!
Наши серверные гномы не смогли найти страницу, которую вы ищете.
Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.
Возможно, некоторые из них могут вас заинтересовать?
Датчик газа сжиженного нефтяного газа – MQ-6
В наличии SEN-09405
Избранное Любимый 20
Список желаний
Блокировочные упоры (набор из 2 шт.)
В наличии ТОЛ-18467
20,00 $
Избранное Любимый 0
Список желаний
МИКРОЭ Реле 3 Нажмите
Нет в наличии COM-19858
18,95 $
Избранное Любимый 0
Список желаний
МИКРОЭ МПУ ИМУ Click
Нет в наличии SEN-20445
39,95 $
Избранное Любимый 0
Список желаний
Могу я вас подбросить?
5 января 2021 г.
Последняя навязчивая идея маленького сына моего друга стала моим последним проектом с спасенным шаговым двигателем, парой сервоприводов и некоторой изобретательностью.
Избранное Любимый 0
Создание искусства: «Дружественные машины» в Музее Боулдера
23 ноября 2021 г.
Эта привлекательная выставка исследует преимущества и недостатки технологий.
Избранное Любимый 0
Руководство по проекту Qwiic Pro Kit
7 ноября 2019 г.
Комплект Qwiic Pro Kit позволяет пользователям начать работу с Arduino без пайки или макетной платы. Мы включили три входа (джойстик, акселерометр и датчик приближения) и один дисплей, который можно последовательно подключить к макетной плате RedBoard Turbo (SAMD21).
Избранное Любимый 2
- Электроника SparkFun®
- 6333 Dry Creek Parkway, Niwot, Colorado 80503
- Настольный сайт
- Ваш счет
- Авторизоваться
- регистр
ОШИБКА – 404 – НЕ НАЙДЕНА
- Главная
- Четыре-четыре
Наши серверные гномы не смогли найти страницу, которую вы ищете.
Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.
Возможно, некоторые из них могут вас заинтересовать?
Метка RFID (125 кГц)
Осталось всего 3! COM-14325
Избранное Любимый 7
Список желаний
МИКРОЭ 10×10 RGB Click
Осталось всего 2! COM-18922
41,95 $
Избранное Любимый 0
Список желаний
MIKROE Balancer 4 Click
Нет в наличии ТОЛ-20651
14,95 $
Избранное Любимый 0
Список желаний
BLE-модуль Nordic nRF52840 (MDBT50Q-1MV2)
В наличии WRL-21605
$12,95 7,95 долларов США
Избранное Любимый 0
Список желаний
Летний лагерь — стиль SparkFun
30 июня 2020 г.