
Решение дифференциальных уравнений второго порядка
Решение простых дифференциальных уравнений второго порядка
Дифференциальные уравнения второго порядка вида
решаются двукратным интегрированием.
Решение линейных дифференциальных уравнений второго порядка
Рассмотрим линейное однородное дифференциальное уравнение второго порядка
Здесь коэффициенты – постоянные действительные числа. Решение этого уравнения будем искать в виде
Подставим эту функцию в уравнение (1):
Поскольку , то функция (2) будет решением линейного однородного уравнения тогда и только тогда, когда будет выполняться равенство
Уравнение (3) называется характеристическим уравнением линейного однородного дифференциального уравнения с постоянными коэффициентами (1). А многочлен n-й степени называется характеристическим многочленом этого уравнения.
Утверждение 1. Если числа – различные действительные корни характеристического уравнения (3) линейного однородного дифференциального уравнения с постоянными коэффициентами (1), то функции образуют фундаментальную систему решений этого уравнения и общее решение уравнения имеет вид:
Утверждение 2. Если – действительный корень характеристического уравнения кратности два, то функции – фундаментальная система решений уравнения (1), общее решение этого уравнения имеет вид:
Утверждение 3. Если – комплексно сопряженные корни характеристического уравнения (3), которое соответствует однородному дифференциальному уравнению второго порядка (1), то функции образуют фундаментальную систему решений этого уравнение и общее решение записывается в виде:
Решение линейных неоднородных ДУ второго порядка
Рассмотрим линейное неоднородное дифференциальное уравнение второго порядка
Коэффициенты – некоторые действительные числа, – непрерывная на отрезке функция, называемая правой частью неоднородного дифференциального уравнения (4).
Общее решение этого уравнения имеет вид
где – произвольные постоянные, – фундаментальная система решений соответствующего однородного уравнения (1), – частное решение неоднородного уравнения (4).
Частное решение можно найти методом подбора (или методом неопределенных коэффициентов) в случае, если правая часть уравнения есть одной из функций вида
или
Здесь – заданные многочлены степени n, – известный многочлен степени m, – некоторые действительные числа.
Метод подбора нахождения частного решения линейного неоднородного уравнения (4) с функцией вида (5), (6) в правой части состоит в том, что частное решение уравнения ищут в виде
– многочлен степени n с неопределенными коэффициентами, s=0 при , которое не является корнем характеристического многочлена, или s кратности , где — корень характеристического многочлена.
или
– многочлены степени k с неопределенными коэффициентами, s=0 ( не является корнем характеристического многочлена), или s кратности — корень характеристического многочлена.
соответственно.
Принцип суперпозиции. Если функция – решение линейного дифференциального уравнения
то тогда функция
есть решением уравнения
или
Решение дифференциальных уравнений на аналоговой машине
Математическая модель объекта, характеризуемого не очень сложными дифференциальными уравнениями, часто может быть реализована на аналоговой вычислительной машине. Однако самым универсальным средством решения задач математического моделирования являются цифровые вычислительные машины. При этом для решения системы уравнений математического описания необходимо иметь численный алгоритм. [c.129]Решение дифференциальных уравнений иа аналоговой машине
В 1945 г. Лебедев создал первую в стране электронную аналоговую вычислительную машину для решения систем обыкновенных дифференциальных уравнений. Сергей Алексеевич Лебедев родился 2 ноября 1902 г. в Нижнем Новгороде в семье учителей. [c.146]
Сергей Алексеевич Лебедев родился 2 ноября 1902 г. в Нижнем Новгороде в семье учителей. [c.146]
Аналоговые машины рассчитаны на решение обыкновенных дифференциальных уравнений цифровые машины быстрее и точнее решают алгебраические уравнения. Аналоговые машины практически не выполняют логических операций, поэтому сложные логические операции производятся только на цифровых машинах. Можно полагать, что совместное использование обоих типов машин для решения важных технологических задач, которые требуют проведения всех трех видов математических операций, окажется весьма эффективным. Устройства, связывающие оба типа вычислительных машин в ходе их работы, используются в системах, предназначенных для оборонных целей модели, применимые для решения технологических проблем, находятся еще в стадии разработки.
Ниже в качестве примера более подробно рассмотрена работа некоторых элементов аналоговой машины типа МН-7. Эта машина предназначена для решения дифференциального уравнения шестого порядка или системы из шести дифференциальных уравнений.
Метод проб и ошибок наиболее распространен при решении краевых задач для систем обыкновенных дифференциальных уравнений. Однако во многих случаях этот метод поиска начальных условий приводит к задаче с неустойчивым решением. Тогда единственно возможным методом решения краевых задач на АВМ становится метод конечных разностей, приводящий к алгебраическим уравнениям. Моделирование же последних связано с большими трудностями и значительными погрешностями. Поэтому, несмотря на ряд очевидных достоинств, применение аналоговых машин для целей математического моделирования химических процессов из-за указанных причин является весьма незначительным по сравнению с цифровыми вычислительными машинами.
Известно несколько способов воспроизведения ядра F (р Р) при решении уравнения (5. 1) на аналоговых вычислительных машинах [129—131] решение дифференциального уравнения для сомножителей ядра или моделирование ядра по асимптотическим свойствам его сомножителей. [c.128]
1) на аналоговых вычислительных машинах [129—131] решение дифференциального уравнения для сомножителей ядра или моделирование ядра по асимптотическим свойствам его сомножителей. [c.128]
Аналоговые машины большей частью используются для решения дифференциальных уравнений. Однако их можно применить и для решения алгебраических уравнений. В действительности они будут решать дифференциальные уравнения, но интерес будет представлять только решение для установившегося состояния, что соответствует решению алгебраических уравнений. Пример итеративного расчета от тарелки к тарелке для многокомпонентной дистилляции описан в работе [5].
Математические машины можно эффективно применять в тех случаях, когда необходимые для вывода расчетных зависимостей решения дифференциальных уравнений осуществить другими способами очень сложно или практически невозможно. На машинах такие решения получают либо в виде непрерывных зависимостей (аналоговые машины ), либо в цифровом виде (дискретные, или цифровые, машины).
Для решения относительно простых задач по обработке эксперимента используют аналоговые вычислительные машины (АВМ). В них результаты химического процесса исследуют с помощью его математической (электрической) модели, набираемой из различных блоков, имеющихся на АВМ. Главное назначение аналоговых машин состоит в решении дифференциальных уравнений скорости и подборе их параметров. Несколько таких вариантов, выведенных на основе вероятных предположений о механизме реакции, программируют на электрической модели машины и подбирают вручную параметры уравнений так, чтобы кривые, получаемые на осциллографе, или данные, наблюдаемые по стрелкам приборов, наилучшим образом совпадали с экспериментом. Недостаточная точность получаемых величин и ограниченность возможностей АВМ делают целесообразным их применение лишь для предварительной отбраковки неадекватных моделей и приблизительной оценки параметров уравнений, удовлетворительно описывающих эксперимент.  297]
297]
В итоге можно сказать, что дифференциальные уравнения можно решать как на аналоговых, так и на цифровых вычислительных машинах. Выбор типа машины диктуется видом и объемом решаемой задачи, возможностями машины, требованиями к точности решения, а иногда такими факторами, как наличие той или иной машины или квалификацией программистов. Наибольшая информационная производительность будет достигнута, несомненно, при соответствии решаемой задачи возможностям применяемой машины. Вообще вопрос о преимуществах аналоговых вычислительных машин по сравнению с цифровыми не относится к компетенции исследователя.
Выше показана в общем виде и на конкретных примерах равноценность (с точки зрения результатов расчета). математического описания процесса в форме дифференциальных уравнений массопередачи и в форме алгебраических уравнений теоретической тарелки. Таким образом, при решении задачи механизации расчетов с помощью вычислительных машин могут быть применены оба метода. Очевидно, при использовании аналоговых машин целесообразно применять метод расчета по уравнениям массопередачи. [c.117]
Очевидно, при использовании аналоговых машин целесообразно применять метод расчета по уравнениям массопередачи. [c.117]
Непрерывный характер решения дифференциального уравнения возможен при непрерывном формировании старшей производной, что обеспечивается решающими блоками аналоговой машины, работающими в замкнутом контуре. [c.44]
В простейших случаях, когда возможно аналитическое решение системы уравнений математического описания, необходимость специальной разработки моделирующего алгоритма, естественно, отпадает, так как вся информация получается из соответствующих аналитических решений. Когда математическое описание представляет собой сложную систему конечных и дифференциальных уравнений, от возможности построения достаточно эффектив–ного моделирующего алгоритма может существенно зависеть практическая применимость математической модели. В особенности это важно при использовании модели для решения задач, в которые она входит составной частью более общего алгоритма, например алгоритма оптимизации. Как правило, в таких случаях для реализации математической модели приходится применять средства вычислительной техники — аналоговые и цифровые вычислительные машины, без которых фактически нельзя ставить и решать сколько-нибудь сложные задачи математического моделирования и, тем более, задачи оптимизации, где расчеты по уравнениям математического описания обычно повторяются многократно. [c.53]
Как правило, в таких случаях для реализации математической модели приходится применять средства вычислительной техники — аналоговые и цифровые вычислительные машины, без которых фактически нельзя ставить и решать сколько-нибудь сложные задачи математического моделирования и, тем более, задачи оптимизации, где расчеты по уравнениям математического описания обычно повторяются многократно. [c.53]
Пропорционально увеличивая или уменьшая коэффициенты передачи интеграторов, можно соответственно ускорить или замедлить процесс интегрирования, что дает возможность проводить решение дифференциального уравнения на аналоговой машине в различных временных режимах [c.73]
Цель работы — показать характерные приемы получения на элементах аналоговой машины функций внешних воздействий, заданных аналитически и в графической форме, а также методы решения дифференциальных уравнений с переменными коэффициентами. [c.115]
Принцип работы современных аналоговых машин основан на использовании аналогии между электрическими явлениями и математическим действиями.
 Таким образом, применение принципа аналогии превращает-в данном случае модель в счетно-решающее устройство. Это в значительной степени устраняет различие между теоретическим исследованием (решение дифференциальных уравнений) и экспериментальным исследованием (постановка опытов на моделях и последующее обобщение их результатов). [c.78]
Таким образом, применение принципа аналогии превращает-в данном случае модель в счетно-решающее устройство. Это в значительной степени устраняет различие между теоретическим исследованием (решение дифференциальных уравнений) и экспериментальным исследованием (постановка опытов на моделях и последующее обобщение их результатов). [c.78] Кинетические уравнения можно проинтегрировать для целого ряда реакционных механизмов, включающих параллельные, последовательные и обратимые стадии первого и второго порядков. Однако для более сложных механизмов решения дифференциальных уравнений нельзя получить в явном виде, так что необходимо или использовать цифровые и аналоговые счетные машины, или вводить физически обоснованные допущения, чтобы упростить математические выражения. Ценные сведения можно получить уже при написании кинетических уравнений сложных реакций, даже если эти уравнения и нельзя точно решить. С их помощью часто оказывается возможным показать почему иногда обнаруживается индукционный период, во время которого реакция идет очень медленно почему сложные реакции могут идти по первому, второму или дробному порядку как эти кажущиеся порядки могут изменяться в ходе реакции и т. н. [c.336]
н. [c.336]
Другой задачей, возникающей при проведении расчетов на аналоговых машинах, является моделирование систем с распределенными параметрами. Эти системы представляются дифференциальными уравнениями в частных производных или большим числом обыкновенных дифференциальных уравнений. Их решение требует применения крупных аналоговых машин. Однако если предварительные результаты можно запомнить в ходе решения, то задача такого типа может быть решена на значительно меньших по размерам машинах при использовании легко программируемой методики последовательного приближения. Эти устройства разрабатываются фирмами, выпускающими вычислительные машины. [c.19]
Широко проникли в кинетические исследования числовые и аналоговые машины. С применением машин ведется обработка полученных результатов, анализ спектров ЭПР и ЯМР, решение систем дифференциальных уравнений, описывающих кинетику сложных реакций. [c.3]
В настоящее время практически ни одно кинетическое исследование не обходится без применения газо-жидкостной хроматографии, обладающей высокой чувствительностью и большой универсальностью. Определенные перспективы открываются благодаря применению в химии резонансной гамма-спектроскопии. Все шире проникают в кинетические исследования различные математические методы обработки результатов. К ним относятся и анализ полученных спектров ЭПР и ЯМР, и решение систем дифференциальных уравнений, описывающих кинетику сложных реакций с использованием числовых и аналоговых электронных вычислительных машин. [c.4]
Определенные перспективы открываются благодаря применению в химии резонансной гамма-спектроскопии. Все шире проникают в кинетические исследования различные математические методы обработки результатов. К ним относятся и анализ полученных спектров ЭПР и ЯМР, и решение систем дифференциальных уравнений, описывающих кинетику сложных реакций с использованием числовых и аналоговых электронных вычислительных машин. [c.4]
Выше было показано (см. стр. 17), что такие различные по природе явления, как трение жидкости, теплопроводность, диффузия, поток электричества и другие описываются одинаковыми дифференциальными уравнениями, т. е. выражают изоморфность математических моделей разных процессов. Таким образом, пользуясь указанной. аналогией математических описаний, уравнения физикохимических процессов можно решать как электриче( кие уравнения при помощи аналоговой вычислительной техники. В этом смысле процесс, протекающий в химическом реакторе, аналогичен решению математической модели его на АВМ. Исследуя процесс на аналоговой машине, можно получить такие же результаты, как если бы мы воспроизводили работу реактора. [c.84]
Исследуя процесс на аналоговой машине, можно получить такие же результаты, как если бы мы воспроизводили работу реактора. [c.84]
Применение АВМ не исключает возможности использования ЦВМ, и наоборот. Например, если для решения задачи требуется провести большой объем вычислений с высокой д-очностью, то можно сначала грубо прикинуть возможные варианты решения на АВМ, а затем получить окончательный ответ, вводя полученные данные в ЦВМ. Существуют также комбинированные (гибридные) аналого-цифровые вычислительные машины. Такие машины позволяют сочетать преимущества АВМ (быстрота решения дифференциальных уравнений, относительная легкость поиска переменных параметров) и ЦВМ (высокая точность, универсальность, возмоллогических операций, запоминание и хранение информации). Обычно в комбинированных машинах аналоговые блоки выполняют интегрирование, а цифровые рассчитывают нелинейные функции, запоминают промежуточные результаты, дают управляющие команды аналоговым блокам и выполняют другие логические операции. Поскольку способы ввода, обработки и выдачи информации в АВМ и ЦВМ резко различаются, в комбинированные машины необходимо вводить аналого-цифровые и цифро-аналоговые преобразователи. [c.326]
Поскольку способы ввода, обработки и выдачи информации в АВМ и ЦВМ резко различаются, в комбинированные машины необходимо вводить аналого-цифровые и цифро-аналоговые преобразователи. [c.326]
В аналоговых машинах использовались электрические, магнитные, оптические и другие сигналы, называвшиеся машинными переменными. Причем помимо простых счетнорешающих приборов в рассматриваемый исторический период существовало производство мощных и дорогсетоящих аналоговых вычислительных мапгин, обеспечивающих значительно лучшие харакгеристики при решении дифференциальных уравнений, чем цифровые вычислительные машины. [c.148]
Рассмотрено решение дифференциальных уравнений неизотермической абсорбции на аналоговой электронно-вычислительной машине. Результаты решения представлены в виде графика, на котором изображена заии-симость между концен-ррацией жидкости, ее температурой и числом единиц переноса. Значения с графика снимаются посредством специального транспаранта. [c.125]
[c.125]
Важный вопрос о соответствии значений констант скоростп реакций эксперпментальным данным вынесен в этой главе в упражнения. Сделано так потому, что, с одной стороны, этот вопрос относится скорее к области чистой, чем прикладной кинетики, и, с другой стороны, его решаюш,ее значение для всей проблемы расчета химических реакторов не вызывает сомнений. Если кинетические зависимости изображаются прямыми линиями, как на логарифмическом графике для реакции первого порядка в упражнении У.2, то оценка точности найденных значений констант скорости реакций может быть получена из отклонения экспериментальных данных от прямой линии, наилучшим образом оиисываюш ей ход процесса. Если дифференциальные уравнения, описывающие систему реакций, должны с самого начала интегрироваться численно, то провести оценку значений констант скорости и их точности значительно труднее. В простейших случаях уравнения можно решать с помощью аналоговой вычислительной машины, где константы скорости представляются переменными сопротивлениями. Эти сопротивления можно изменять вручную, пока не будет достигнуто наилучшее возможное соответствие между расчетными и экспериментальными данными. Если решение проводится на цифровой вычислительной машине, следует использовать метод проб и ошибок. Предположим, [c.116]
Эти сопротивления можно изменять вручную, пока не будет достигнуто наилучшее возможное соответствие между расчетными и экспериментальными данными. Если решение проводится на цифровой вычислительной машине, следует использовать метод проб и ошибок. Предположим, [c.116]
Системы (7.29) н (7.30) состоят из нелинейных дифференциальных уравнений, не имеющих общего решения. Поэтому интегрирование этих систем может быть выполнено численными методами на ЭВМ (либо моделированием на аналоговых вычислительных машинах). Для их интегрирования необходимо задать начальные условия. В начале открытия клапана (угол Фоткр) перемещение и скорость тарелки равны нулю. Равно нулю также ускорение тарелки, так как ее движение начинается в момент, когда равнодействующая всех действующих на нее сил равна нулю. Тогда начальные условия для систем (7.29) и (7.30) Ф = Фоткр X = 0 (1х/[c.209]
Хотя цифровые машины решают дифференциальные уравнения в основном методом последовательных приближений, для сложных систем уравнений существуют более тонкие методы численного интегрирования. Ошибка вычисления существует и при решении на аналоговых вычислительных машинах, и исследователь должен уметь оценивать точность получаемого решения, особенно при Ентегрпрова-нип, где ошибки также интегрируются. [c.39]
Ошибка вычисления существует и при решении на аналоговых вычислительных машинах, и исследователь должен уметь оценивать точность получаемого решения, особенно при Ентегрпрова-нип, где ошибки также интегрируются. [c.39]
Чтобы решить на аналоговой машине дифференциальное уравнение для описанной ранее задачи с емкостью, в которой изменение-уровня во времени определяется уравнением dhldt = Q i) — Kh /г, нужно соединить необходимые для решения элементы так, как показано на рис. П-15. Интегрирование осуществляется с помощью операционного усилителя, выход которого является интегралом от суммы входов, т. е. /г = —j2nx dt, а функции (t) я h воспроизводятся с помощью блоков, вырабатывающих нелинейные функции. [c.39]
Таким образом, здесь, как и в предыдущих примерах, учитываются причинно-следственные связи изучаемого явления, что значительно облегчает построение математической модели и способствует ее вычислительной устойчивости. При решении на аналоговой вычислительной машине уравнение Г = К (Р — 2 PqYi) преобразовывается в дифференциальное уравнение dTidt = K Pq PqY )-На рпс. V-3 показана блок-схема решения модели на аналоговой вычислительной машине. В качестве интегратора здесь применен операционный усилитель с большим коэффициентом усиления и с конденсатором малой емкости (0,001 мкф), включенным в цепь обратной связи. Выбрав величину К = -j-lO (что определяется допустимой ошибкой интегрирования), получим время интегрирования порядка 10″ 3 сек, а разность между Р и 2 Ро Y сводится практически к нулю. [c.92]
V-3 показана блок-схема решения модели на аналоговой вычислительной машине. В качестве интегратора здесь применен операционный усилитель с большим коэффициентом усиления и с конденсатором малой емкости (0,001 мкф), включенным в цепь обратной связи. Выбрав величину К = -j-lO (что определяется допустимой ошибкой интегрирования), получим время интегрирования порядка 10″ 3 сек, а разность между Р и 2 Ро Y сводится практически к нулю. [c.92]
Микрокинетические исследования позволяют определить маршруты реакций и выбрать наиболее достоверный и.з них, а также рассчитать порядок и константы скоростей реакций. Эти исследования проводят в лаборатории таким образом, чтобы изучить кинетику химической реакции в чистом виде , без влияния условий перемешивания реагентов, тепловых и диффузионных эффектов и дифференциальных, проточно-интегральных или циркуляционных реакторах. При постановке лабораторных микрокинетических исследований опыты осуществляют с использованием современных научных методов экспериментирования — направленного многофакторного эксперимента, при котором одновременно изменяют несколько наиболее существенных параметров и целенаправленно обеспечивают выход процесса в оптимальны11 режим . При проведении микрокинетических исследований обязательно применяют ЭВМ, на которой быстро просматривают все возможные решения кинетических уравнений и выбирают наиболее достоверный маршрут химической реакции при разных температурных условиях. Использование научного метода направленного многофакторного эксперимента ЭВМ резко сокращает число необходимых опытов и позволяет определить оптимальные условия течения химической реакции. В связи с этим обязательной составной частью оборудования химической лаборатории должна быть ЭВ1 [ (на рис. УН-18 аналоговая машина). - [c.483]
При проведении микрокинетических исследований обязательно применяют ЭВМ, на которой быстро просматривают все возможные решения кинетических уравнений и выбирают наиболее достоверный маршрут химической реакции при разных температурных условиях. Использование научного метода направленного многофакторного эксперимента ЭВМ резко сокращает число необходимых опытов и позволяет определить оптимальные условия течения химической реакции. В связи с этим обязательной составной частью оборудования химической лаборатории должна быть ЭВ1 [ (на рис. УН-18 аналоговая машина). - [c.483]
На сложность решения еще существеннее влияет линейность или нелинейность уравнений. Линейные обьжновенные дифференциальные уравнения решаются гораздо проще для них разработан ряд специальных методов, например операционное исчисление. Линейные дифференциальные уравнения с постоянными коэффициентами имеют простое аналитическое решение. Решение систем линейных дифференциапьных уравнений – задача, к решению которой хорошо приспособлены аналоговые вычислительные машины. [c.17]
[c.17]
Дифференциальные уравнения – ИСТОРИЯ
Дифференциальные уравнения – раздел математики, изучающий теорию и способы решения уравнений, содержащих искомую функцию и ее производные различных порядков одного аргумента (обыкновенные дифференциальные) или нескольких аргументов (дифференциальные уравнения в частных производных). Дифференциальные уравнения широко используются на практике, в частности для описания переходных процессов.
Теория дифференциальных уравнений – раздел математики, занимающийся изучением дифференциальных уравнений и связанных с ними задач. Их результаты применяются во многих естественных науках, особенно широко – в физике.
Проще говоря, дифференциальное уравнение – это уравнение, в котором неизвестной величиной является некоторая функция.При этом, в самом уравнении участвует не только неизвестная функция, но и различные ее производные. Дифференциальным уравнением описывается связь между неизвестной функцией и ее производными. Такие связи отыскиваются в различных областях знаний: в механике, физике, химии, биологии, экономике и др.
Такие связи отыскиваются в различных областях знаний: в механике, физике, химии, биологии, экономике и др.
Различают обыкновенные дифференциальные уравнения и дифференциальные уравнения в частных производных. Более сложными являются интегро-дифференциальные уравнения.
Сначала дифференциальные уравнения возникли из задач механики, в которых участвовали координаты тел, их скорости и ускорения, рассматриваемые как функции от времени.
Дифференциальное уравнение называется интегрируемых в квадратурах, если задачу нахождения всех развязок связей можно свести к вычислению конечного числа интегралов от известных функций и простых алгебраических операций.
История
Леонард Эйлер Жозеф-Луи Лагранж
Дифференциальные уравнения изобретены Ньютоном (1642-1727). Ньютон считал это свое изобретение настолько важным, что зашифровал его в виде анаграммы, смысл которой в современных терминах можно свободно передать так: «законы природы выражаются дифференциальными уравнениями».
Основным аналитическим достижением Ньютона было разложение всевозможных функций в степенные ряды (смысл второй, длинной анаграммы Ньютона в том, что для решения любого уравнения нужно подставить в уравнение ряд и приравнять члены одинакового степени). Особое значение имела здесь открытая им формула бинома Ньютона (разумеется, не только с целыми показателями, для которых формулу знал, например, Виет (1540-1603), но и, что особенно важно, с дробными и отрицательными показателями). Ньютон разложил в «ряды Тейлора» все основные элементарные функции Это, вместе с составленной им таблице первобытных (которая перешла в почти неизменном виде в современные учебники анализа ), позволяло ему, по его словам, сравнивать площади любых фигур «за половину четверти часа».
Ньютон указывал, что коэффициенты его рядов пропорциональны последовательным производным функции, но не останавливался на этом подробно, поскольку он справедливо считал, что все вычисления в анализе удобнее проводить не с помощью кратных дифференцировок, а путем вычисления первых членов ряда. Для Ньютона связь между коэффициентами ряда и производными был скорее средством вычисления производных, чем средством составления ряда. Одним из важнейших достижений Ньютона является его теория солнечной системы, изложенная в «Математических принципах натуральной философии» («Principia») без помощи математического анализа. Обычно считают, что Ньютон открыл с помощью своего анализа закон всемирного тяготения. На самом деле Ньютону (1680) принадлежит лишь доказательство эллиптичности орбит в поле притяжения по закону обратных квадратов: сам этот закон был указан Ньютону Гуком (1635-1703) и, пожалуй, угадывался еще несколькими учеными.
Для Ньютона связь между коэффициентами ряда и производными был скорее средством вычисления производных, чем средством составления ряда. Одним из важнейших достижений Ньютона является его теория солнечной системы, изложенная в «Математических принципах натуральной философии» («Principia») без помощи математического анализа. Обычно считают, что Ньютон открыл с помощью своего анализа закон всемирного тяготения. На самом деле Ньютону (1680) принадлежит лишь доказательство эллиптичности орбит в поле притяжения по закону обратных квадратов: сам этот закон был указан Ньютону Гуком (1635-1703) и, пожалуй, угадывался еще несколькими учеными.
Пьер-Симон Лаплас
Из огромного числа работ XVIII века по дифференциальным уравнениям выделяются работы Эйлера (1707-1783) и Лагранжа(1736-1813). В этих работах была прежде развита теория малых колебаний, а следовательно – теория линейных систем дифференциальных уравнений; попутно возникли основные понятия линейной алгебры (собственные числа и векторы в n-мерном случае). Характеристическое уравнение линейного оператора долго называли секулярным, поскольку именно из такого уравнения определяются секулярные (возрастные, т.е. медленные по сравнению с годовым движением) возмущения планетных орбит согласно теории малых колебаний Лагранжа. Вслед за Ньютоном Лаплас и Лагранж, а позже Гаусс (1777-1855) развивают также методы теории возмущений.
Характеристическое уравнение линейного оператора долго называли секулярным, поскольку именно из такого уравнения определяются секулярные (возрастные, т.е. медленные по сравнению с годовым движением) возмущения планетных орбит согласно теории малых колебаний Лагранжа. Вслед за Ньютоном Лаплас и Лагранж, а позже Гаусс (1777-1855) развивают также методы теории возмущений.
Жозеф Лиувилль
Когда была доказана неразрешимость алгебраических уравнений в радикалах, Жозеф Лиувилль (1809-1882) построил аналогичную теорию для дифференциальных уравнений, установив невозможность решения ряда уравнений (в частности таких классических, как линейные уравнения второго порядка) в элементарных функциях и квадратурах. Позже Софус Ли (1842-1899), анализируя вопрос об интегрировании уравнений в квадратурах, пришел к необходимости детально исследовать группы дифеоморфизмив (получившие впоследствии имя групп Ли ) – так по теории дифференциальных уравнений возникла одна из самых плодотворных областей современной математики, дальнейшее развитие которой было тесно связано совсем с другими вопросами ( алгебры Ли еще раньше рассматривали Симеон-Дени Пуассон (1781-1840) и, особенно, Карл Густав Якоб Якоби (1804-1851)).
Анри Пуанкаре
Новый этап развития теории дифференциальных уравнений начинается с работ Анри Пуанкаре (1854-1912), созданная им «качественная теория дифференциальных уравнений» вместе с теорией функций комплексных переменных привела к основанию современной топологии. Качественная теория дифференциальных уравнений, или, как теперь ее чаще называют, теория динамических систем, сейчас развивается наиболее активно и имеет наиболее важные применения теории дифференциальных уравнений в естествознании.
Решить ⚠️ дифференциальное уравнение: примеры решения
Уравнения встречаются повсеместно. С помощью формул и их систем рассчитывают разные величины и описывают физические процессы. С древних времен сферы применения уравнений только увеличиваются. К примеру, дифференциальные уравнения необходимы для освоения информатики, компьютерных технологий, физики.
Решение дифференциальных уравнений
Дифференциальные уравнения решают с помощью производных, которые являются пределами отношений приращения функций к приращению аргумента, при том, что приращение аргумента приближается к нулевому значению. Порядок таких уравнений соответствует наивысшему порядку производной, которая включена в уравнения. Степень определяется максимальной степенью, возведенной производной наивысшего порядка.
Порядок таких уравнений соответствует наивысшему порядку производной, которая включена в уравнения. Степень определяется максимальной степенью, возведенной производной наивысшего порядка.
Решить дифференциальное уравнение — значит, найти множество всех функций, удовлетворяющих данному уравнению.
Такие множества записывают в следующем виде:
\(y = f(x;C)\)
где С представляет собой произвольную постоянную.
Общее решение дифференциального уравнения n-го порядка является некой функцией, которая зависит от аргумента x и n-го числа независимых произвольных постоянных.
Основные способы решения системы
При наличии навыков решения однородных уравнений второго порядка и неоднородных уравнений второго порядка, в состав которых включены постоянные коэффициенты, справиться с системами дифференциальных уравнений достаточно просто. Выделяют ключевые типы СДУ:
- линейные однородные;
- линейные неоднородные.

Решают системы дифференциальных уравнений несколькими методами:
- метод исключения, с помощью преобразования системы к одному дифференциальному уравнению;
- по средствам характеристического уравнения или способом Эйлера.
Линейные однородные системы дифференциальных уравнений
В качестве максимально простой однородной системы дифференциальных уравнений можно рассмотреть такую:
Источник: mathprofi.ruk, l, m, n являются числовыми коэффициентами, которые в большинстве случаев обладают ненулевыми значениями;
x(t), y(t) — функциональные значения, которые нужно найти;
t — самостоятельная переменная;
\(x’,\;y’\) — первичные производные находимых значений вышеупомянутых функций.
В качестве примера можно решить систему дифференциальных уравнений, называемую задачей Коши:
Источник: mathprofi.ruНачальные условия будут следующими:
х (0) = 3
у (0) = 0
Источник: avatars. {-2t}\left(\left(\frac{4C_1-3C_2}5\right)\cos\left(3t\right)+\left(\frac{3C_1+4C_2}5\right)\sin\left(3t\right)\right)+1\)
{-2t}\left(\left(\frac{4C_1-3C_2}5\right)\cos\left(3t\right)+\left(\frac{3C_1+4C_2}5\right)\sin\left(3t\right)\right)+1\)Общее решение системы будет иметь вид:
Источник: mathprofi.ruПриступаем к поиску частного решения, исходя из условий задачи:
Источник: mathprofi.ruМожно записать окончательный ответ:
Источник: mathprofi.ru Источник: mathprofi.ruМетод характеристического уравнения (метод Эйлера)
Данный способ применяется крайне редко. Целесообразно рассмотреть алгоритм метода Эйлера или характеристического уравнения на конкретном примере. Пусть дана линейная однородная система дифференциальных уравнений:
Источник: mathprofi.ru Источник: rusvesna.suСледует записать матрицу, которая будет включать коэффициенты при неизвестных функциях в правых частях уравнений системы:
\(\ A=\left(\begin{array}{ll}{-1} & {-5} \\ {-7} & {-3}\end{array}\right)\)
Далее необходимо рассчитать собственные значения записанной матрицы с помощью характеристического уравнения и его корней:
\(\ |A-\lambda E|=0 \Rightarrow\left|\left(\begin{array}{cc}{-1} & {-5} \\ {-7} & {-3}\end{array}\right)-\lambda \cdot\left(\begin{array}{cc}{1} & {0} \\ {0} & {1}\end{array}\right)\right|\)
\(\left|\begin{array}{cc}{-1-\lambda} & {-5} \\ {-7} & {-3-\lambda}\end{array}\right|\)
\((-1-\lambda)(-3-\lambda)-(-7) \cdot(-5)\)
\(\lambda^{2}+4 \lambda-32=0\)
\({\lambda_{1}=-8}\)
\({\lambda_{2}=4}\)
Далее нужно определить собственные векторы, соответствующие полученным собственным значениям. {4 t}}\end{array}\right) \)
{4 t}}\end{array}\right) \)
Можно записать окончательный ответ:
Источник: mathprofi.ru Источник: ykt2.ruС системами дифференциальных уравнений работать гораздо проще, если освоить основные приемы решений. В том случае, когда по данной теме или любой другой возникают какие-либо сложности, всегда можно обратиться за помощью к сервису Феникс.Хелп.
Однородные дифференциальные уравнения
Здесь мы рассмотрим специальный метод решения “Однородных дифференциальных уравнений”
Однородные дифференциальные уравнения
Дифференциальное уравнение первого порядка Однородно , когда оно может быть представлено в такой форме:
dy dx = F( y x )
Мы можем решить это с помощью разделения переменных, но сначала мы создадим новую переменную v = y x
v = y x , что также равно y = vx
И dy dx = d (vx) dx = v dx dx + x dv dx 4, который можно упростить до dy dx = v + x dv dx
Используя y = vx и dy dx = v + x dv dx , мы можем решить дифференциальное уравнение.
Пример покажет, как это все делается:
Пример: решить
dy dx = x 2 + y 2 xyМожем ли мы получить его в стиле F( y x )?
Начните с: x 2 + y 2 xy
Отдельные термины: x 2 xy + y 2 xy
Упростить: x y + y x
Обратная величина первого члена:( y x ) -1 + y x
Да, у нас есть функция y x .
Итак, вперед:
Начните с: dy dx = ( y x ) -1 + y x
y = vx и dy dx = v + x dv dx : v + x dv dx = v -1 + v
Вычесть v с обеих сторон: x dv dx = v -1
Теперь используйте разделение переменных:
Разделите переменные: v dv = 1 x dx
Поставьте знак интеграла впереди: ∫v dv = ∫ 1 x dx
Интегрировать: v 2 2 = ln(x) + C
Тогда мы получаем C = ln(k) : v 2 2 = ln(x) + ln(k)
Комбайн ln: v 2 2 = ln(kx)
Упростить:v = ±√(2 ln(kx))
Теперь подставьте назад v = y x
Замена v = y x : y x = ±√(2 ln(kx))
Упростить:y = ±x √(2 ln(kx))
И у нас есть решение.
Положительная часть выглядит так:
Другой пример:
Пример: решить
dy dx = y(x−y) x 2Можем ли мы получить его в стиле F( y x )?
Начните с: y(x−y) x 2
Отдельные термины: xy x 2 − y 2 x 2
Упростить: y x − ( y x ) 2
Да! Итак, поехали:
Начните с: dy dx = y x − ( y x ) 2
y = vx и dy 3 dx
= v + x dv dx v + x dv dx = V – V 2Вычесть v с обеих сторон: x dv dx = −v 2
Теперь используйте разделение переменных:
Разделите переменные: − 1 v 2 dv = 1 x dx
Поставьте знак интеграла впереди:∫− 1 v 2 dv = ∫ 1 x dx
Интегрировать: 1 v = ln(x) + C
Тогда мы получаем C = ln(k) : 1 v = ln(x) + ln(k)
Комбайн ln: 1 v = ln(kx)
Упростить:v = 1 ln(kx)
Теперь подставьте назад v = y x
Замена v = y x : y x = 1 ln(kx)
Упростить:y = x ln(kx)
И у нас есть решение.
Вот некоторые примеры значений k:
И последний пример:
Пример: решить
dy dx = x−y x+yМожем ли мы получить его в стиле F( y x )?
Начните с: x−y x+y
Разделить на x: x/x−y/x x/x+y/x
Упрощение: 1−y/x 1+y/x
Да! Итак, поехали:
Начните с: dy dx = 1−y/x 1+y/x
y = vx и dy 3 dx = v + x dv dx v + x dv dx = 1-V 1 + V
Вычесть v с обеих сторон: x dv dx = 1−v 1+v − v
Тогда: x dv dx = 1−v 1+v − v+v 2 1+v
Упростить:x dv dx = 1−2v−v 2 1+v
Теперь используйте разделение переменных:
Разделите переменные: 1+v 1−2v−v 2 dv = 1 x dx
Поставьте знак интеграла впереди:∫ 1+v 1−2v−v 2 dv = ∫ 1 x dx
Интегрируем: − 1 2 ln(1−2v−v 2 ) = ln(x) + C
Тогда мы получаем C = ln(k) :− 1 2 ln(1−2v−v 2 ) = ln(x) + ln(k)
Объединить ln:(1−2v−v 2 ) -½ = kx
Квадрат и обратный: 1-2v-v 2 = 1 k 2 x 2
Теперь подставьте назад v = y x
Замена V = Y x : 1-2 ( y x ) – ( y x ) 2 = 1 K 2 x 2 x 2
Умножить на x 2 😡 2 −2xy−y 2 = 1 k 2
Мы почти у цели. .. хорошо отделить y хотя!
.. хорошо отделить y хотя!
Мы можем попытаться разложить на множители x 2 −2xy−y 2 , но сначала мы должны сделать некоторую перестановку:
Изменить знаки:y 2 +2xy−x 2 = − 1 k 2
Заменить − 1 k 2 на c:y 2 +2xy−x 2 = c
Добавьте 2x 2 к обеим сторонам:y 2 +2xy+x 2 = 2x 2 +c
Коэффициент:(y+x) 2 = 2x 2 +c
Квадратный корень:y+x = ±√(2x 2 +c)
Вычесть x с обеих сторон: y = ±√(2x 2 +c) − x
И у нас есть решение.
Положительная часть выглядит так:
Все основы, которые должен знать каждый
Уровень 3 (для продвинутых учащихся) Уровень 3 требует освоения основ векторного, дифференциального и интегрального исчисления. Подходит для студентов и старшеклассников.
Подходит для студентов и старшеклассников.
- Что такое дифференциальное уравнение? Здесь вы узнаете, как идентифицировать дифференциальное уравнение и какие задачи связаны с DEQ.
- Различные обозначения дифференциального уравнения Здесь вы познакомитесь с обозначениями Лейбница, Ньютона и Лагранжа для дифференциального уравнения.
- Что делать с дифференциальным уравнением? Здесь вы узнаете, что значит решить DEQ и всегда ли это возможно.
- Как определить дифференциальное уравнение? Что характеризует DEQ и как узнать, есть ли передо мной DEQ? Это первый вопрос, на который вы должны ответить, прежде чем решать DEQ!
- Классификация: Какие существуют типы DEQ? Здесь вы узнаете, как распознать, когда DEQ является обычным, частичным, линейным, однородным, неоднородным и какого он порядка.
- Ограничения: граничные и начальные условия Здесь вы узнаете, почему важны ограничения для DEQ и в чем разница между граничными и начальными условиями.
Например, если вы планируете справиться с …
атомный мир,
Движение планет,
Химические процессы,
Электрические цепи,
прогнозов погоды
или с распространением вируса
то вы в итоге столкнетесь с так называемыми дифференциальными уравнениями .
Как только вы поймете, как работают дифференциальные уравнения и как их решать, вы сможете заглянуть в прошлое и в будущее. В этом уроке вы изучите основы для этого.
Что такое дифференциальное уравнение?
Иллюстрация : Масса на пружине испытывает восстанавливающую силу, когда пружина смещается.Рассмотрим на простом примере закон Гука:
Этот закон описывает восстанавливающую силу \(F\), действующую на массу, прикрепленную к пружине. Масса испытывает эту силу, когда вы смещаете ее на расстояние \(y\) от положения равновесия.\(D\) — постоянный коэффициент, характеризующий, насколько тяжело растянуть или сжать пружину.
Масса испытывает эту силу, когда вы смещаете ее на расстояние \(y\) от положения равновесия.\(D\) — постоянный коэффициент, характеризующий, насколько тяжело растянуть или сжать пружину.
Масса \(m\) скрыта в силе. Запишем силу по второму закону Ньютона в виде \(m\, a\):
Аксиома Ньютона равна закону ГукаЗдесь \(a\) – ускорение, которое испытывает масса при ее смещении на расстояние \(y\) из положения покоя. Как только вы потянете массу и отпустите ее, пружина начнет раскачиваться вперед и назад.Без трения, как в этом случае, он никогда не перестанет раскачиваться.
Пока масса колеблется, перемещение \(y\) изменяется. Следовательно, смещение зависит от времени \(t\). Таким образом, и ускорение \(а\) зависит от времени \(t\). Масса, конечно, остается неизменной в любое время, независимо от того, насколько смещена пружина. Это верно и в хорошем приближении для жесткости пружины \(D\):
Аксиома Ньютона, равная закону Гука с зависимостью от времениЕсли теперь перевести \(m\) в другую сторону, мы можем использовать это уравнение для рассчитать ускорение, испытываемое массой при каждом перемещении \(y\):
Ускорение с использованием аксиомы Ньютона и закона Гука Якорь формулы $$ \begin{align} a(t) ~=~ -\frac{D}{m }\,y(t) \end{align} $$Но что, если нас интересует вопрос:
При каком смещении \(y\) будет пружина через 24 секунды?
Чтобы иметь возможность ответить на такой вопрос будущего, мы должны знать, как именно \(y\) зависит от времени \(t\). 2} ~=~ -\frac{D}{m}\,y(t) \end{align} $$
2} ~=~ -\frac{D}{m}\,y(t) \end{align} $$
Это обозначение часто встречается в физике.2} ~=~ -\frac{D}{m}\,y \end{align} $$
Если функция \(y\) зависит только от времени \(t\), то мы можем записать производная по времени еще более компактно с так называемой нотацией Ньютона. Одна производная по времени от \(y\) соответствует одной точке выше \(y\). Таким образом, если есть вторая производная по времени, как в нашем случае, будет две точки:
Нотация Ньютона Якорь формулы $$ \begin{align} \ddot{y} ~=~ -\frac{D}{m} \,y \end{align} $$Очевидно, что эта запись довольно неудобна, если вы хотите рассмотреть десятую производную…
Еще одно обозначение, с которым вы, скорее всего, столкнетесь в математике, — это обозначение Лагранжа. Здесь мы используем штрихи для производных. Итак, для второй производной два простых числа:
Обозначение Лагранжа Якорь формулы $$ \begin{align} y” ~=~ -\frac{D}{m}\,y \end{align} $$ In Лагранжа, из контекста должно быть ясно, по какой переменной дифференцируется функция.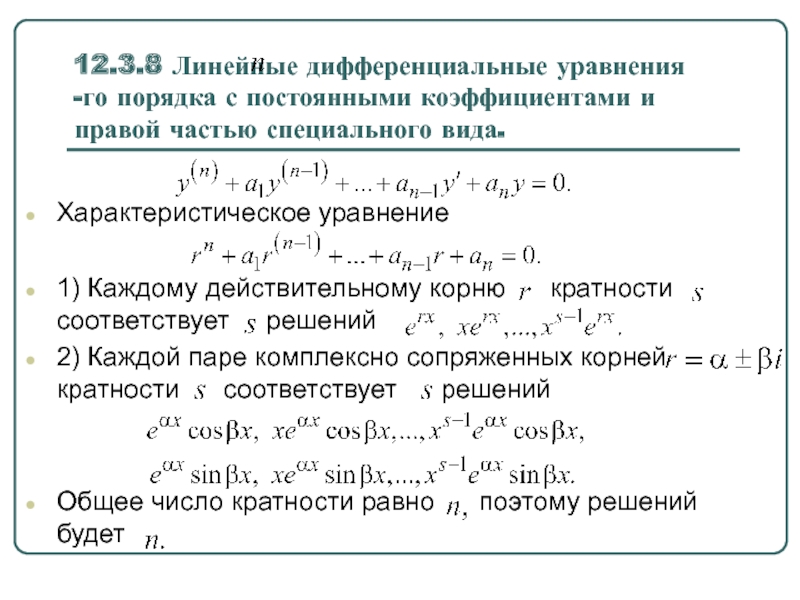 Если непонятно, то следует явно указать, от каких переменных \(y\) зависит:
Если непонятно, то следует явно указать, от каких переменных \(y\) зависит:
Каждая нотация имеет свои преимущества и недостатки.2} ~+~ \frac{D}{m}\,x ~=~ 0 \end{align} $$
Что делать с дифференциальным уравнением?
Чтобы ответить на наш предыдущий вопрос:
При каком смещении \(y\) будет пружина через 24 секунды?
надо решить поставленное дифференциальное уравнение . Решение дифференциального уравнения означает, что вы должны выяснить , как искомая функция \(y\) точно зависит от переменной \(t\):
Искомая функция в DGL Для простых дифференциальных уравнений, как и в случае с колеблющейся массой, существуют методы решения, которые можно использовать для нахождения функции \(y(t)\). Имейте в виду, однако, что не существует общего рецепта решения произвольного дифференциального уравнения. Для некоторых дифференциальных уравнений не существует даже аналитического решения ! Здесь выражение « не аналитическое » означает, что нельзя записать конкретное уравнение для функции \(y(t)\):
Имейте в виду, однако, что не существует общего рецепта решения произвольного дифференциального уравнения. Для некоторых дифференциальных уравнений не существует даже аналитического решения ! Здесь выражение « не аналитическое » означает, что нельзя записать конкретное уравнение для функции \(y(t)\):
Единственная возможность в этом случае — решить дифференциальное уравнение на компьютере численно . Тогда компьютер выдает не конкретную формулу, а точки данных, которые вы можете изобразить на диаграмме, а затем проанализировать поведение дифференциального уравнения.
Как определить дифференциальное уравнение?
Как только вы столкнетесь с дифференциальным уравнением, первое, что вам нужно выяснить, это
какое из них функция, которую вы ищете
и от каких переменных она зависит .
В нашем дифференциальном уравнении 5
колеблющейся массы функция, которую мы ищем, называется \(y\) и зависит от переменной \(t\):
В качестве другого примера рассмотрим волновое уравнение, описывающее электрическое поле электромагнитной волны, распространяющейся со скоростью света \(c\ ):
Волновое уравнение-DEQ для E-поля Якорь формулы $$ \begin{align} \frac{\partial^2 \class{red}{E}}{\partial \class{grey}{x} ^ 2} ~+~ \ frac {\ partial ^ 2 \ class {red} {E}} {\ partial \ class {grey} {y} ^ 2} ~+~ \ frac {\ partial ^ 2 \ class {red {E}}{\ partial \ class {grey} {z} ^ 2} ~=~ \ frac {1} {c ^ 2} \, \ frac {\ partial ^ 2 \ class {red} {E}} {\partial \class{gray}{t}^2} \end{align} $$ Какую функцию вы ищете в этом дифференциальном уравнении? Это функция \(E\), потому что здесь встречаются ее производные. 2}} \end{align} $$
2}} \end{align} $$
Здесь у вас есть так называемая система связанных дифференциальных уравнений .В этом случае одного дифференциального уравнения недостаточно для описания движения массы в гравитационном поле. Фактически здесь ищутся три функции, а именно траектории \(x(t)\), \(y(t)\) и \(z(t)\), определяющие положение массы в трехмерном пространстве. космос. Каждая функция описывает движение в одном из трех пространственных направлений. И все три траектории зависят только от времени \(t\).
Что вообще это значит, если у нас есть связанных дифференциальных уравнений? Слово «связанный» означает, что, например, в первом дифференциальном уравнении для функции \(х\) есть еще и функция \(у\).Таким образом, мы не можем просто решить первое дифференциальное уравнение независимо от второго, потому что второе уравнение говорит нам, как \(y\) ведет себя в первом уравнении. Во всех трех дифференциальных уравнениях встречаются все искомые функции \(x\), \(y\) и \(z\), а это значит, что мы должны решать все три дифференциальных уравнения одновременно.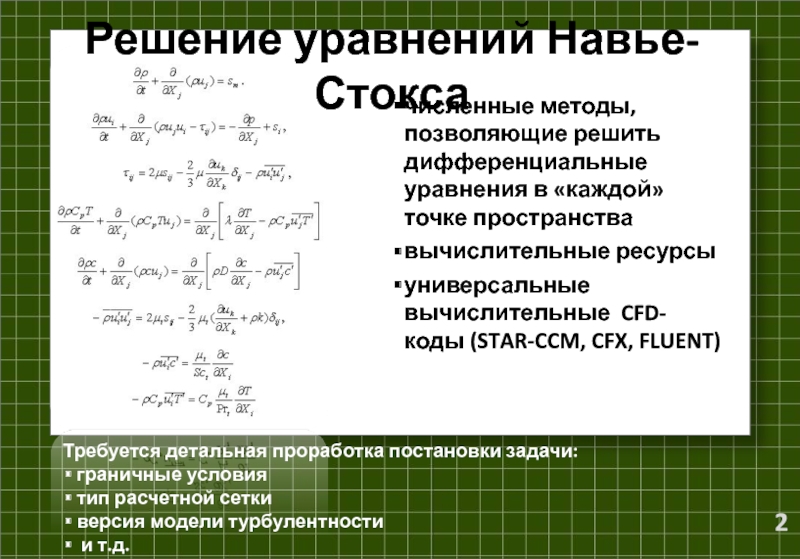
Классификация: Какие существуют типы DEQ?
Существуют различные типы дифференциальных уравнений. Однако, если вы внимательно посмотрите, вы заметите, что некоторые дифференциальные уравнения имеют сходство между собой.
Иллюстрация : Различные типы дифференциальных уравнений.После того, как вы узнали, какую функцию ищете и от каких переменных она зависит, вам следует ответить на несколько основных вопросов, чтобы лучше узнать дифференциальное уравнение:
Дифференциальное уравнение обыкновенное или в частных производных?
Уравнения в частных производных описывают многомерные задачи и значительно сложнее.Какого порядка дифференциальное уравнение?
Дифференциальные уравнения 1-го порядка обычно легко решаются и описывают, например, экспоненциальное поведение, такое как радиоактивный распад или охлаждение жидкости. Дифференциальные уравнения 2-го порядка, напротив, несколько сложнее и также часто встречаются в природе. Уравнения электродинамики Максвелла, уравнение квантовой механики Шредингера — это все дифференциальные уравнения 2-го порядка. Только начиная со 2-го порядка дифференциальное уравнение может описывать колебание. И только начиная с третьего порядка дифференциальное уравнение может описывать хаос.
Дифференциальные уравнения 2-го порядка, напротив, несколько сложнее и также часто встречаются в природе. Уравнения электродинамики Максвелла, уравнение квантовой механики Шредингера — это все дифференциальные уравнения 2-го порядка. Только начиная со 2-го порядка дифференциальное уравнение может описывать колебание. И только начиная с третьего порядка дифференциальное уравнение может описывать хаос.Является ли дифференциальное уравнение линейным или нелинейным?
Принцип суперпозиции применяется к линейным дифференциальным уравнениям, что невероятно полезно, например, при описании электромагнитных явлений.Нелинейные дифференциальные уравнения гораздо сложнее и встречаются, например, в нелинейной электронике при описании сверхпроводящих токов. Более того, хаос может возникнуть только в нелинейных дифференциальных уравнениях третьего порядка и выше. Когда вы сталкиваетесь с таким уравнением, иногда единственное, что вы можете сделать, это выбросить ручку и бумагу и решить уравнение численно на компьютере. 2} \end{align} $$
2} \end{align} $$— это уравнение в частных производных .«Частичное» означает, что искомая функция \(E\) зависит как минимум от двух переменных и в уравнение входят производные по этим переменным. В этом случае \(E\) зависит от четырех переменных: \(t\), \(x\), \(y\) и \(z\). А в дифференциальном уравнении появляются еще и производные по этим переменным.
Что такое уравнение в частных производных?В этом типе дифференциального уравнения искомая функция зависит как минимум от двух переменных, и встречаются производные функции по крайней мере по двум из этих переменных.2}} ~+~ \frac{D}{m}\,y ~=~ 0 \end{align} $$
Поскольку в нашем уравнении вторая производная \(y\) равна наибольшей , это поэтому является дифференциальным уравнением 2-го порядка.
Преобразование DEQ более высокого порядка в DEQ 1-го порядка
Скорость как производная по времени от смещения является первым порядком DEQ Формула anchor $$ \begin{align} v ~=~ \frac{\text{d}y}{\text{d}t} \end{align} $$
Всегда можно преобразовать дифференциальное уравнение более высокого порядка в систему дифференциальных уравнений 1-го порядка. Иногда эта процедура помогает при решении дифференциальных уравнений. Например, мы можем преобразовать это дифференциальное уравнение 2-го порядка в два связанных дифференциальных уравнения 1-го порядка.Для этого нам просто нужно ввести новую функцию, назовем ее \(v\) и определим ее как первую производную по времени от \(y\):
Иногда эта процедура помогает при решении дифференциальных уравнений. Например, мы можем преобразовать это дифференциальное уравнение 2-го порядка в два связанных дифференциальных уравнения 1-го порядка.Для этого нам просто нужно ввести новую функцию, назовем ее \(v\) и определим ее как первую производную по времени от \(y\):Это уже один из двух DEQ 1-го порядка. Теперь нам нужно только выразить вторую производную в исходном DEQ с производной от \(v\). Тогда получаем второй DEQ 1-го порядка:
DEQ первого порядка по закону Гука Якорь формулы $$ \begin{align} \frac{\text{d}v}{\text{d}t} ~+~ \ frac{D}{m}\,y ~=~ 0 \end{align} $$Эти два уравнения представляют собой связанных дифференциальных уравнений, которые мы должны решить одновременно.
 Они связаны, потому что и \(y\), и \(v\) встречаются как в первом DEQ, так и во втором DEQ. Вы можете использовать эту процедуру всякий раз, когда хотите понизить порядок дифференциального уравнения. Цена, которую вы должны заплатить, — это дополнительные связанные дифференциальные уравнения.
Они связаны, потому что и \(y\), и \(v\) встречаются как в первом DEQ, так и во втором DEQ. Вы можете использовать эту процедуру всякий раз, когда хотите понизить порядок дифференциального уравнения. Цена, которую вы должны заплатить, — это дополнительные связанные дифференциальные уравнения.Дифференциальное уравнение для закона радиоактивного распада,
Якорь формулы $$ \begin{align} – \lambda \, N ~=~ \class{red}{\frac{\text{d}N}{\text{ d}t}} \end{align} $$, с другой стороны, является дифференциальным уравнением первого порядка , поскольку наибольшая производная искомой функции \(N(t)\) является первой производной.{\class{blue}{1}} \end{align} $$ Что такое линейное дифференциальное уравнение?
Дифференциальное уравнение называется линейным, если искомая функция и ее производные входят только в степени 1 и нет произведений искомой функции на ее производные, а также нет композиций с искомой функцией.
Система связанных дифференциальных уравнений для движения массы в гравитационном поле, с другой стороны, является нелинейной :
Пример нелинейной DEQ – масса в гравитационном поле Формула якоря $$ \begin{align} \frac{\text{d}^2x}{\text{d}t^2} &~=~ G \, \frac{m}{\sqrt{x^{\class{blue}} {2}} ~+~ y ^ {\ class {синий} {2}} ~+~ z ^ {\ class {синий} {2}}}} \\\\
\ frac {\ text {d}^ 2y}{\text{d}t^2} &~=~ G \, \frac{m}{\sqrt{x^{\class{blue}{2}} ~+~ y^{\class{blue {2}} ~+~ z ^ {\ class {синий} {2}}}} \\\\
\ frac {\ text {d} ^ 2z} {\ text {d} t ^ 2} &~ =~ G \, \ frac {m} {\ sqrt {x ^ {\ class {blue} {2}} ~+~ y ^ {\ class {blue} {2}} ~+~ z ^ {\ class { blue}{2}}}} \end{align} $$Здесь искомые функции \(x(t)\), \(y(t)\) и \(z(t)\) встречаются в квадратичной форме .
 Но даже если бы не было квадратов, все равно были бы квадратный корень и дробь, которые делают систему дифференциальных уравнений нелинейной!
Но даже если бы не было квадратов, все равно были бы квадратный корень и дробь, которые делают систему дифференциальных уравнений нелинейной!Является ли линейное дифференциальное уравнение однородным или неоднородным?
В следующих типах дифференциальных уравнений важны коэффициенты , умноженные на искомую функцию и ее производные. В некоторых методах решения важно различать…
постоянные коэффициенты – НЕ зависят от переменных, от которых также зависит искомая функция.
непостоянные коэффициенты – НЕ ЗАВИСИМ от переменных, от которых зависит искомая функция.
Коэффициент не обязательно должен быть умножен на искомую функцию или ее производную. Он также может стоять только ! В этом случае мы называем единственный коэффициент функцией возмущения .
В нашем дифференциальном уравнении для колеблющейся массы есть интересный коэффициент, который умножается на искомую функцию \(y\), а именно \(D/m\).
 2} ~+~ \class{red}{\mu}\,\frac{\text{d}y}{\text{d}t} ~+~ \class{red}{\frac{D}{m }}\,y ~=~ \class{red}{F(t)} \end{align} $$
2} ~+~ \class{red}{\mu}\,\frac{\text{d}y}{\text{d}t} ~+~ \class{red}{\frac{D}{m }}\,y ~=~ \class{red}{F(t)} \end{align} $$Здесь внешняя сила \(F(t)\) соответствует функции возмущения. Как видите, он стоит один, без умножения на функцию \(y(t)\) или ее производные. Более того, функция возмущения \(F(t)\) зависит от времени, поэтому она является непостоянным коэффициентом.
Ограничения: Граничные и начальные условия
Одного дифференциального уравнения недостаточно для однозначного описания физической системы .Решение дифференциального уравнения описывает довольно много возможных систем, имеющих определенное поведение. Например, решение закона радиоактивного распада описывает экспоненциальное поведение. Однако знаний об экспоненциальном поведении недостаточно, чтобы точно сказать, сколько атомных ядер распалось за 10 секунд.
Именно поэтому на каждое дифференциальное уравнение обычно задается ограничений .
 Это дополнительная информация, которую необходимо сообщить дифференциальному уравнению, чтобы уточнить решение уравнения. число необходимых ограничений зависит от \textit{порядка} дифференциального уравнения.
Это дополнительная информация, которую необходимо сообщить дифференциальному уравнению, чтобы уточнить решение уравнения. число необходимых ограничений зависит от \textit{порядка} дифференциального уравнения.Для дифференциального уравнения 1-го порядка необходимо одно ограничение , а именно
значение функции искомой функции \(y(t)\).
Например, для закона радиоактивного распада следует указать, сколько еще не распавшихся атомных ядер \(N\) имелось в момент \(t = 0 \). Например, одна 1000 атомных ядер: \(N(0) = 1000 \).
Для дифференциального уравнения 2-го порядка необходимы два ограничения :
значение функции искомой функции \(y(t)\) и
например значение функции первой производной \( y'(t)\)
Для колеблющейся массы значение функции может быть \( y(0) = 1\), которое задает начальное перемещение, а значение функции первой производной может быть \( y'(0) = 0\), задающее начальную скорость массы.
Для дифференциального уравнения 3-го порядка тогда необходимы три ограничения для однозначного описания системы:
значение функции искомой функции \(y(t)\)
значение функции, например его первой производной \(y'(t)\) и
значение функции, например, ее второй производной \(y”(t)\)
Для дифференциального уравнения 4-го порядка тогда четыре ограничения были бы необходимы и так далее…
Как однозначно определить «типичный» DEQ?Чтобы однозначно определить решение дифференциального уравнения \(n\)-го порядка, необходимо как минимум \(n\) ограничений.
В большинстве случаев вы будете сталкиваться с так называемыми начальными и граничными условиями. Это также просто имена для ограничений, которые сообщают вам, какую информацию вы имеете о системе.
Иллюстрация : Разница между граничными условиями и начальными условиями.
Иногда, например, вы знаете, в каком состоянии находилась система в определенное время.Это может быть начальный момент, когда вы сместили и отпустили массу на пружине. В таком случае мы говорим о начальных условиях . Вы указываете в один определенный момент времени , например, в момент времени \(t=0\), значение которого имело смещение \(y(0)\). А поскольку нам нужны два ограничения, вы также указываете, какое значение производная \(y'(0)\) (то есть скорость) имела в тот же момент времени \(t = 0\).
Что такое задача с начальным значением?Мы называем дифференциальное уравнение вместе с начальными условиями начальной задачей .Если мы решим задачу о начальных значениях, мы сможем использовать это решение для предсказания будущего поведения системы.
Иногда вам не повезло, и вы не знаете скорость колеблющейся массы в некоторый начальный момент времени \(t = 0\). Таким образом, вы не знаете производную \(y'(0)\) в момент времени \(t = 0\), в котором вы также знаете смещение \(y(0\).
 Но вам действительно нужны два ограничения , иначе не подсчитаешь конкретных цифр… Но может быть ты знаешь, что например после \( t = 6\, \text{s}\) колеблющаяся масса находилась в максимально смещенном состоянии.Итак, вы знаете смещение \(y(6)\).
Но вам действительно нужны два ограничения , иначе не подсчитаешь конкретных цифр… Но может быть ты знаешь, что например после \( t = 6\, \text{s}\) колеблющаяся масса находилась в максимально смещенном состоянии.Итак, вы знаете смещение \(y(6)\).Если у вас есть ограничения, такие как \(y(t_1)\) и \(y(t_2)\), заданные для описания системы в два \textit{разных} момента времени \(t_1\) и \( t_2\), то мы называем их граничными условиями .
Что такое краевая задача?Мы называем дифференциальное уравнение вместе с двумя или более граничными условиями граничными условиями . Если мы решим краевую задачу, мы можем использовать это решение, чтобы предсказать, как система ведет себя в этих границах.
‘Значения функции в два разных момента времени’ были, конечно, просто примером. Вместо времени это может быть любая переменная, фиксирующая систему на границах. В разное время, в разных позициях, под разными углами и так далее.
Итак, теперь вы узнали все необходимые основы дифференциальных уравнений. На следующем уроке мы рассмотрим, как мы можем решать дифференциальные уравнения, используя различные методы.
Решение многомерных уравнений в частных производных с использованием глубокого обучения
Значение
Уравнения в частных производных (УЧП) являются одними из самых распространенных инструментов, используемых при моделировании задач в природе.Однако решение многомерных УЧП было общеизвестно сложным из-за «проклятия размерности». В этой статье представлен практический алгоритм решения нелинейных уравнений в частных производных в очень больших (сотнях и, возможно, тысячах) измерениях. Численные результаты показывают, что предложенный алгоритм достаточно эффективен для широкого круга задач как с точки зрения точности, так и скорости. Мы считаем, что это открывает множество возможностей в экономике, финансах, операционных исследованиях и физике, рассматривая всех участвующих агентов, активы, ресурсы или частицы одновременно, вместо того, чтобы делать специальные предположения об их взаимосвязях.

Abstract
Разработка алгоритмов решения многомерных дифференциальных уравнений в частных производных (УЧП) долгое время была чрезвычайно сложной задачей из-за печально известной сложной проблемы, известной как «проклятие размерности». В этой статье представлен подход, основанный на глубоком обучении, который может обрабатывать общие многомерные параболические уравнения в частных производных. С этой целью УЧП переформулируются с использованием обратных стохастических дифференциальных уравнений, а градиент неизвестного решения аппроксимируется нейронными сетями, что очень похоже на глубокое обучение с подкреплением, при этом градиент действует как функция политики.Численные результаты на примерах, включающих нелинейное уравнение Блэка-Шоулза, уравнение Гамильтона-Якоби-Беллмана и уравнение Аллена-Кана, показывают, что предложенный алгоритм достаточно эффективен в больших размерностях с точки зрения как точности, так и стоимости. Это открывает возможности в экономике, финансах, операционных исследованиях и физике, рассматривая всех участвующих агентов, активы, ресурсы или частицы одновременно, вместо того, чтобы делать специальные предположения об их взаимосвязях.
Дифференциальные уравнения в частных производных (УЧП) являются одними из самых распространенных инструментов, используемых при моделировании задач в природе. Некоторые из наиболее важных из них естественным образом формулируются как УЧП больших размерностей. Хорошо известны следующие примеры:
i ) Уравнение Шредингера в квантовой задаче многих тел. В этом случае размерность УЧП примерно в три раза превышает количество электронов или квантовых частиц в системе.
ii ) Нелинейное уравнение Блэка-Шоулза для оценки производных финансовых инструментов, в котором размерность PDE представляет собой количество рассматриваемых базовых финансовых активов.
iii ) Уравнение Гамильтона–Якоби–Беллмана в динамическом программировании. В сеттинге теории игр с несколькими агентами размерность возрастает линейно с количеством агентов. Точно так же в задаче распределения ресурсов размерность возрастает линейно с количеством устройств и ресурсов.

Какими бы изящными ни были эти модели УЧП, их практическое применение оказалось очень ограниченным из-за проклятия размерности (1): вычислительные затраты на их решение растут экспоненциально с ростом размерности.
Еще одной областью, где проклятие размерности было существенным препятствием, является машинное обучение и анализ данных, где сложность моделей нелинейной регрессии, например, возрастает экспоненциально с ростом размерности. В обоих случаях основная проблема, с которой мы сталкиваемся, состоит в том, как представить или аппроксимировать нелинейную функцию в больших размерностях. Традиционный подход, заключающийся в построении функций с использованием полиномов, кусочных полиномов, вейвлетов или других базисных функций, обязательно столкнется с проблемой проклятия размерности.
В последние годы новый класс методов, модель глубокой нейронной сети, продемонстрировал значительный успех в области искусственного интеллекта (например, ссылки 2⇓⇓⇓–6).
 Нейронная сеть — старая идея, но недавний опыт показал, что глубокие сети со многими слоями на удивление хорошо справляются с моделированием сложных наборов данных. С точки зрения представления функций модель нейронной сети является композиционной: она использует композиции простых функций для аппроксимации сложных. Напротив, подход классической теории приближения обычно является аддитивным.С математической точки зрения существуют универсальные теоремы аппроксимации, утверждающие, что одна нейронная сеть со скрытым слоем может аппроксимировать широкий класс функций на компактных подмножествах (см., например, обзор в ссылке 7 и ссылки в нем), хотя нам все еще не хватает теоретической основы. за объяснение кажущейся необоснованной эффективности широко используемых в настоящее время многослойных нейронных сетей. Несмотря на это, практический успех глубоких нейронных сетей в искусственном интеллекте был очень удивительным и поощрял применение к другим проблемам, где проклятие размерности было мучительной проблемой.
Нейронная сеть — старая идея, но недавний опыт показал, что глубокие сети со многими слоями на удивление хорошо справляются с моделированием сложных наборов данных. С точки зрения представления функций модель нейронной сети является композиционной: она использует композиции простых функций для аппроксимации сложных. Напротив, подход классической теории приближения обычно является аддитивным.С математической точки зрения существуют универсальные теоремы аппроксимации, утверждающие, что одна нейронная сеть со скрытым слоем может аппроксимировать широкий класс функций на компактных подмножествах (см., например, обзор в ссылке 7 и ссылки в нем), хотя нам все еще не хватает теоретической основы. за объяснение кажущейся необоснованной эффективности широко используемых в настоящее время многослойных нейронных сетей. Несмотря на это, практический успех глубоких нейронных сетей в искусственном интеллекте был очень удивительным и поощрял применение к другим проблемам, где проклятие размерности было мучительной проблемой.
В этой статье мы расширяем возможности глубоких нейронных сетей до другого измерения, разрабатывая стратегию решения большого класса многомерных нелинейных уравнений в частных производных с использованием глубокого обучения. Класс УЧП, с которыми мы имеем дело, — это (нелинейные) параболические УЧП. Особые случаи включают уравнение Блэка – Шоулза и уравнение Гамильтона – Якоби – Беллмана. Для этого мы используем переформулировку этих УЧП в виде обратных стохастических дифференциальных уравнений (ОСДУ) (например, ссылки 8 и 9) и аппроксимируем градиент решения с помощью глубоких нейронных сетей.Методология имеет некоторое сходство с глубоким обучением с подкреплением, где BSDE играет роль обучения с подкреплением на основе моделей (или моделей теории управления), а градиент решения играет роль функции политики. Численные примеры показывают, что предложенный алгоритм вполне удовлетворителен как по точности, так и по вычислительной стоимости.
Из-за проклятия размерности в литературе имеется очень ограниченное число случаев, когда практические алгоритмы большой размерности были разработаны.
 Для линейных параболических УЧП можно использовать формулу Фейнмана – Каца и методы Монте-Карло для разработки эффективных алгоритмов для оценки решений в любых заданных точках пространства-времени. Для класса невязких уравнений Гамильтона-Якоби Дарбон и Ошер (10) недавно разработали эффективный алгоритм в многомерном случае, основанный на формуле Хопфа для уравнений Гамильтона-Якоби. Общий алгоритм для нелинейных параболических УЧП, основанный на многоуровневой декомпозиции итерации Пикара, разработан в ссылке.11 и доказал свою эффективность на ряде примеров из области финансов и физики. Метод ветвящейся диффузии предложен в работах. 12 и 13, в котором используется тот факт, что решения полулинейных УЧП с полиномиальной нелинейностью могут быть представлены как математическое ожидание функционала ветвящихся диффузионных процессов. Этот метод не страдает от проклятия размерности, но все же имеет ограниченную применимость из-за разрушения приближенных решений за конечное время.
Для линейных параболических УЧП можно использовать формулу Фейнмана – Каца и методы Монте-Карло для разработки эффективных алгоритмов для оценки решений в любых заданных точках пространства-времени. Для класса невязких уравнений Гамильтона-Якоби Дарбон и Ошер (10) недавно разработали эффективный алгоритм в многомерном случае, основанный на формуле Хопфа для уравнений Гамильтона-Якоби. Общий алгоритм для нелинейных параболических УЧП, основанный на многоуровневой декомпозиции итерации Пикара, разработан в ссылке.11 и доказал свою эффективность на ряде примеров из области финансов и физики. Метод ветвящейся диффузии предложен в работах. 12 и 13, в котором используется тот факт, что решения полулинейных УЧП с полиномиальной нелинейностью могут быть представлены как математическое ожидание функционала ветвящихся диффузионных процессов. Этот метод не страдает от проклятия размерности, но все же имеет ограниченную применимость из-за разрушения приближенных решений за конечное время.Отправной точкой настоящей статьи является глубокое обучение.
 Следует подчеркнуть, что, несмотря на то, что глубокое обучение было очень успешным инструментом для ряда приложений, его практическая успешная адаптация к текущим условиям по-прежнему остается весьма нетривиальной задачей. Здесь, используя переформулировку BSDE, мы можем представить проблему решения PDE как проблему обучения и разработать структуру глубокого обучения, которая естественным образом подходит для этой ситуации. Это оказалось весьма успешным на практике.
Следует подчеркнуть, что, несмотря на то, что глубокое обучение было очень успешным инструментом для ряда приложений, его практическая успешная адаптация к текущим условиям по-прежнему остается весьма нетривиальной задачей. Здесь, используя переформулировку BSDE, мы можем представить проблему решения PDE как проблему обучения и разработать структуру глубокого обучения, которая естественным образом подходит для этой ситуации. Это оказалось весьма успешным на практике.Методология
Мы рассматриваем общий класс УЧП, известный как полулинейные параболические УЧП.Эти УЧП могут быть представлены как ∂u∂t(t,x)+12TrσσT(t,x)(Hessxu)(t,x)+∇u(t,x)⋅µ(t,x)+ft,x, u(t,x),σT(t,x)∇u(t,x)=0[1]с некоторым заданным терминальным условием u(T,x)=g(x). Здесь t и x представляют переменную времени и d-мерного пространства, соответственно, μ — известная вектор-функция, σ — известная матрица-функция размера d × d, σT обозначает транспонирование, связанное с σ, ∇u и Hessxu обозначают градиент и гессиан функции u по x, Tr обозначает след матрицы, f — известная нелинейная функция.
 Для закрепления идей нас интересует решение при t=0, x=ξ для некоторого вектора ξ∈Rd.
Для закрепления идей нас интересует решение при t=0, x=ξ для некоторого вектора ξ∈Rd.Пусть {Wt}t∈[0,T] — d-мерное броуновское движение и {Xt}t∈[0,T] — d-мерный случайный процесс, удовлетворяющий условию Xt=ξ+∫0tµ(s,Xs) ds+∫0tσ(s,Xs)dWs.[2] Тогда решение уравнения 1 удовлетворяет следующему BSDE (см., например, ссылки 8 и 9): u(t,Xt)−u(0,X0)=−∫0tfs,Xs,u(s,Xs),σT(s ,Xs)∇u(s,Xs)ds+∫0t[∇u(s,Xs)]Tσ(s,Xs)dWs. 3 .
Чтобы вывести численный алгоритм для вычисления u(0,X0), мы рассматриваем u(0,X0)≈θu0,∇u(0,X0)≈θ∇u0 как параметры в модели и рассматриваем уравнение. 3 как способ вычисления значений u в конечное время T, зная u(0,X0) и ∇u(t,Xt). Мы применяем временную дискретизацию к уравнениям. 2 и 3 . Для заданного разбиения временного интервала [0,T]: 0=t0
 [6] Учитывая эту временную дискретизацию, путь {Xtn}0≤n≤N можно легко выбрать с помощью уравнения 4 . Наш следующий ключевой шаг — аппроксимация функции x↦σT(t,x)∇u(t,x) на каждом временном шаге t=tn с помощью многослойной нейронной сети с прямой связьюσT(tn,Xtn)∇u(tn,Xtn)= (σT∇u)(tn,Xtn)≈(σT∇u)(tn,Xtn|θn),[7] для n=1,…,N−1, где θn – параметры нейронной сети, аппроксимирующей x↦σT (t,x)∇u(t,x) при t=tn.
[6] Учитывая эту временную дискретизацию, путь {Xtn}0≤n≤N можно легко выбрать с помощью уравнения 4 . Наш следующий ключевой шаг — аппроксимация функции x↦σT(t,x)∇u(t,x) на каждом временном шаге t=tn с помощью многослойной нейронной сети с прямой связьюσT(tn,Xtn)∇u(tn,Xtn)= (σT∇u)(tn,Xtn)≈(σT∇u)(tn,Xtn|θn),[7] для n=1,…,N−1, где θn – параметры нейронной сети, аппроксимирующей x↦σT (t,x)∇u(t,x) при t=tn.После этого мы сложим все подсети в уравнении. 7 вместе, чтобы сформировать глубокую нейронную сеть в целом, на основе суммирования уравнения. 5 более n=1,…,N−1. В частности, эта сеть принимает пути {Xtn}0≤n≤N и {Wtn}0≤n≤N в качестве входных данных и дает конечный результат, обозначаемый û({Xtn}0≤n≤N,{Wtn} 0≤n≤N), как аппроксимацию u(tN,XtN). Мы ссылаемся на Материалы и методы для получения более подробной информации об архитектуре нейронной сети. Различие в совпадении заданного терминального условия можно использовать для определения ожидаемой функции потерь l(θ)=E|g(XtN)−û{Xtn}0≤n≤N,{Wtn}0≤n≤N|2 .
 [8] Полный набор параметров равен θ={θu0,θ∇u0,θ1,…,θN−1}.
[8] Полный набор параметров равен θ={θu0,θ∇u0,θ1,…,θN−1}.Теперь мы можем использовать алгоритм стохастического градиентного спуска (SGD) для оптимизации параметра θ, как и при стандартном обучении глубоких нейронных сетей. В наших числовых примерах мы используем оптимизатор Адама (14). См. Материалы и методы для получения более подробной информации об обучении глубоких нейронных сетей. Поскольку BSDE используется как важный инструмент, мы называем методологию, представленную выше, методом глубокого BSDE.
Примеры
Нелинейное уравнение Блэка–Шоулза с риском дефолта.
Ключевым вопросом при торговле производными финансовыми инструментами является определение подходящей справедливой цены. Блэк и Шоулз (15) показали, что цена u производного финансового инструмента удовлетворяет параболическому УЧП, известному в настоящее время как уравнение Блэка-Шоулза. Модель Блэка-Шоулза может быть дополнена, чтобы учесть несколько важных факторов на реальных рынках, включая дефолтные ценные бумаги, более высокие процентные ставки по займам, чем по кредитам, транзакционные издержки, неопределенности в параметрах модели и т.
 д.(например, ссылки 16⇓⇓⇓–20). Каждый из этих эффектов приводит к нелинейному вкладу в модель ценообразования (например, ссылки 17, 21 и 22). В частности, кредитный кризис и продолжающийся европейский кризис суверенного долга выявили самый основной риск, который не учитывался в исходной модели Блэка-Шоулза, а именно риск дефолта (21).
д.(например, ссылки 16⇓⇓⇓–20). Каждый из этих эффектов приводит к нелинейному вкладу в модель ценообразования (например, ссылки 17, 21 и 22). В частности, кредитный кризис и продолжающийся европейский кризис суверенного долга выявили самый основной риск, который не учитывался в исходной модели Блэка-Шоулза, а именно риск дефолта (21).В идеале модели ценообразования должны учитывать всю корзину базовых активов, от которых зависят производные финансовые инструменты, что приводит к высокоразмерным нелинейным PDE.Однако существующие алгоритмы ценообразования не могут решить эти проблемы, как правило, из-за проклятия размерности. Чтобы продемонстрировать эффективность метода глубокого BSDE, мы изучаем частный случай модели рекурсивной оценки с риском дефолта (16, 17). Мы считаем справедливую цену европейского требования, основанного на 100 базовых активах, обусловленной отсутствием дефолта. Когда происходит дефолт эмитента требования, держатель требования получает только долю δ∈[0,1) от текущей стоимости.
 Возможный дефолт моделируется временем первого скачка пуассоновского процесса с интенсивностью Q, убывающей функцией текущего значения; то есть дефолт становится более вероятным, когда стоимость претензии низка. Затем процесс создания ценности можно смоделировать по уравнению. 1 с генератором ft,x,u(t,x),σT(t,x)∇u(t,x)=−1−δQ(u(t,x))u(t,x)−R u(t,x)[9](16), где R — процентная ставка безрискового актива. Мы предполагаем, что цена базового актива движется как геометрическое броуновское движение, и выбираем функцию интенсивности Q как кусочно-линейную функцию текущего значения с тремя областями (vh
Возможный дефолт моделируется временем первого скачка пуассоновского процесса с интенсивностью Q, убывающей функцией текущего значения; то есть дефолт становится более вероятным, когда стоимость претензии низка. Затем процесс создания ценности можно смоделировать по уравнению. 1 с генератором ft,x,u(t,x),σT(t,x)∇u(t,x)=−1−δQ(u(t,x))u(t,x)−R u(t,x)[9](16), где R — процентная ставка безрискового актива. Мы предполагаем, что цена базового актива движется как геометрическое броуновское движение, и выбираем функцию интенсивности Q как кусочно-линейную функцию текущего значения с тремя областями (vhВыбираем T=1,δ=2/3, R=0,02, µ¯=0,02, σ¯=0,2, vh=50, vl=70, γh=0,2, γl=0,02 и терминальное условие g( x)=min{x1,…,x100} для x=(x1,…,x100)∈R100.
Рис. 1. На рис. 1 показаны среднее значение и стандартное отклонение θu0 как аппроксимация u(t=0,x=(100,…,100)), при этом окончательная относительная ошибка составляет 0,46%. Неизвестное явно «точное» решение уравнения 11 при t=0, x=(100,…,100) приближенно вычислено многоуровневым методом Пикара (11): u(t=0,x=(100,…,100))≈57 .300. Для сравнения, если не учитывать риск дефолта, получаем ũ(t=0,x=(100,…,100))≈60,781. В этом случае модель становится линейной и может быть решена прямыми методами Монте-Карло. Однако пренебрежение рисками дефолта приводит к значительной ошибке в ценообразовании, как показано выше. Глубокий метод BSDE позволяет нам строго учитывать риски дефолта в моделях ценообразования. Это, в свою очередь, позволяет оценивать производные финансовые инструменты со значительно меньшими рисками для вовлеченных сторон и общества.
На рис. 1 показаны среднее значение и стандартное отклонение θu0 как аппроксимация u(t=0,x=(100,…,100)), при этом окончательная относительная ошибка составляет 0,46%. Неизвестное явно «точное» решение уравнения 11 при t=0, x=(100,…,100) приближенно вычислено многоуровневым методом Пикара (11): u(t=0,x=(100,…,100))≈57 .300. Для сравнения, если не учитывать риск дефолта, получаем ũ(t=0,x=(100,…,100))≈60,781. В этом случае модель становится линейной и может быть решена прямыми методами Монте-Карло. Однако пренебрежение рисками дефолта приводит к значительной ошибке в ценообразовании, как показано выше. Глубокий метод BSDE позволяет нам строго учитывать риски дефолта в моделях ценообразования. Это, в свою очередь, позволяет оценивать производные финансовые инструменты со значительно меньшими рисками для вовлеченных сторон и общества.График зависимости θu0 как аппроксимации u(t=0,x=(100,…,100)) от количества итераций в случае 100-мерного нелинейного уравнения Блэка–Шоулза с 40 равноудаленные временные шаги (N = 40) и скорость обучения 0,008.
 Заштрихованная область изображает среднее ± стандартное отклонение θu0 как аппроксимацию u(t=0,x=(100,…,100)) для пяти независимых прогонов. Глубокий метод BSDE обеспечивает относительную ошибку размера 0,46% за время выполнения 1607 с.
Заштрихованная область изображает среднее ± стандартное отклонение θu0 как аппроксимацию u(t=0,x=(100,…,100)) для пяти независимых прогонов. Глубокий метод BSDE обеспечивает относительную ошибку размера 0,46% за время выполнения 1607 с.Уравнение Гамильтона–Якоби–Беллмана.
Термин «проклятие размерности» был впервые явно использован Ричардом Беллманом в контексте динамического программирования (1), которое теперь стало краеугольным камнем во многих областях, таких как экономика, поведенческие науки, информатика и даже биология, где разумное решение изготовление – основная проблема.В контексте теории игр, где есть несколько игроков, каждый игрок должен решить многомерное уравнение типа Гамильтона-Якоби-Беллмана (HJB), чтобы найти свою оптимальную стратегию. В задаче динамического распределения ресурсов, включающей множество сущностей с неопределенностью, принцип динамического программирования также приводит к многомерному уравнению HJB (23) для функции ценности. До недавнего времени эти многомерные УЧП в основном оставались неразрешимыми.
 Теперь мы покажем ниже, что метод глубокого BSDE является эффективным инструментом для решения этих многомерных задач.
Теперь мы покажем ниже, что метод глубокого BSDE является эффективным инструментом для решения этих многомерных задач.Рассмотрим классическую линейно-квадратичную гауссову (ЛКГ) задачу управления в 100 измерениях, dXt=2λ mt dt+2 dWt[12] с t∈[0,T], X0=x, и с функционалом стоимости J( {mt}0≤t≤T)=E∫0T‖mt‖2 dt+g(XT). Здесь {Xt}t∈[0,T] — процесс состояния, {mt}t∈[0,T] — процесс управления, λ — положительная константа, представляющая «силу» управления, а {Wt}t ∈[0,T] — стандартное броуновское движение. Нашей целью является минимизация стоимостного функционала за счет процесса управления.
Уравнение HJB для этой задачи имеет вид ∂u∂t(t,x)+Δu(t,x)−λ‖∇u(t,x)‖2=0[13][e.г., Юн и Чжоу (ссылка 24, стр. 175–184)]. Значение решения u(t,x) уравнения 13 при t=0 представляет собой оптимальную стоимость, когда состояние начинается с x. Применяя формулу Ито, можно показать, что точное решение уравнения 13 с терминальным условием u(T,x)=g(x) допускает явную формулу u(t,x)=−1λln Eexp −λg(x+2WT−t).
 [14]Это можно использовать для проверки точность предложенного алгоритма.
[14]Это можно использовать для проверки точность предложенного алгоритма.Решаем уравнение HJB. 13 в 100-мерном случае с g(x)=ln(1+‖x‖2)/2 для x∈R100.На рис. 2, Top показано среднее значение и стандартное отклонение относительной ошибки для u(t=0,x=(0,…,0)) в случае λ=1. Глубокий метод BSDE обеспечивает относительную ошибку 0,17% при времени выполнения 330 с на Macbook Pro. Мы также используем метод BSDE для приближенного расчета оптимальной стоимости u(t=0,x=(0,…,0)) при различных значениях λ (рис. 2, Низ ). Кривая на рис. 2, Низ , ясно подтверждает интуицию о том, что оптимальная стоимость уменьшается по мере увеличения силы контроля.
Рис. 2.( Top ) Относительная погрешность метода глубокого BSDE для u(t=0,x=(0,…,0)) при λ=1 в зависимости от числа шагов итерации в случае 100-мерное уравнение HJB. 13 с 20 равноудаленными временными шагами (N = 20) и скоростью обучения 0,01. Заштрихованная область изображает среднее ± стандартное отклонение относительной ошибки для пяти различных прогонов.
 Глубокий метод BSDE обеспечивает относительную ошибку размера 0,17% за время выполнения 330 с. ( Bottom ) Оптимальная стоимость u(t=0,x=(0,…,0)) при различных значениях λ в случае 100-мерного уравнения HJB. 13 , полученный методом глубокого BSDE и классическим моделированием уравнения Монте-Карло. 14 .
Глубокий метод BSDE обеспечивает относительную ошибку размера 0,17% за время выполнения 330 с. ( Bottom ) Оптимальная стоимость u(t=0,x=(0,…,0)) при различных значениях λ в случае 100-мерного уравнения HJB. 13 , полученный методом глубокого BSDE и классическим моделированием уравнения Монте-Карло. 14 .Уравнение Аллена–Кана.
Уравнение Аллена-Кана представляет собой уравнение реакции-диффузии, возникающее в физике и служащее прототипом для моделирования фазового разделения и перехода порядок-беспорядок (например, ссылка 25). Здесь мы рассматриваем типичное уравнение Аллена–Кана с «потенциалом двойной ямы» в 100-мерном пространстве, ∂u∂t(t,x)=Δu(t,x)+u(t,x)−u(t ,x)3,[15]с начальным условием u(0,x)=g(x), где g(x)=1/(2+0.4 ‖x‖2) для x∈R100. Применив преобразование временной переменной t↦T−t (T>0), мы можем превратить уравнение 15 в виде уравнения. 1 , чтобы можно было использовать метод глубокого BSDE.
Рис. 3. На рис. 3, Top показано среднее значение и стандартное отклонение относительной ошибки u(t=0,3,x=(0,…,0)). Точное решение уравнения, не известное явно. 15 при t=0,3, x=(0,…,0) вычислено приближенно методом ветвящейся диффузии (например, ссылки 12 и 13): u(t=0,3,x=(0,… ,0))≈0.0528. Для этого 100-мерного примера PDE метод глубокого BSDE обеспечивает относительную ошибку 0,30% при времени выполнения 647 с на Macbook Pro. Мы также используем метод глубокого BSDE для аппроксимативного вычисления временной эволюции u(t,x=(0,…,0)) для t∈[0,0.3] (рис. 3, Bottom ).
На рис. 3, Top показано среднее значение и стандартное отклонение относительной ошибки u(t=0,3,x=(0,…,0)). Точное решение уравнения, не известное явно. 15 при t=0,3, x=(0,…,0) вычислено приближенно методом ветвящейся диффузии (например, ссылки 12 и 13): u(t=0,3,x=(0,… ,0))≈0.0528. Для этого 100-мерного примера PDE метод глубокого BSDE обеспечивает относительную ошибку 0,30% при времени выполнения 647 с на Macbook Pro. Мы также используем метод глубокого BSDE для аппроксимативного вычисления временной эволюции u(t,x=(0,…,0)) для t∈[0,0.3] (рис. 3, Bottom ).( Top ) Относительная погрешность глубокого метода BSDE для u(t=0.3,x=(0,…,0)) в зависимости от количества шагов итерации в случае 100-мерного алгоритма Аллена – Уравнение Кана. 15 с 20 равноудаленными временными шагами (N = 20) и скоростью обучения 0.0005. Заштрихованная область показывает среднее ± стандартное отклонение относительной ошибки для пяти различных прогонов.
 Глубокий метод BSDE обеспечивает относительную погрешность в размере 0,30 % за время выполнения 647 с. ( Bottom ) Эволюция во времени u(t,x=(0,…,0)) для t∈[0,0.3] в случае 100-мерного уравнения Аллена–Кана. 15 вычислено методом глубокого BSDE.
Глубокий метод BSDE обеспечивает относительную погрешность в размере 0,30 % за время выполнения 647 с. ( Bottom ) Эволюция во времени u(t,x=(0,…,0)) для t∈[0,0.3] в случае 100-мерного уравнения Аллена–Кана. 15 вычислено методом глубокого BSDE.Выводы
Алгоритм, предложенный в этой статье, открывает множество возможностей в нескольких различных областях. Например, в экономике можно рассматривать множество различных взаимодействующих агентов одновременно, вместо использования модели «репрезентативного агента».Точно так же в финансах можно рассматривать все участвующие инструменты одновременно, вместо того, чтобы полагаться на специальные предположения об их взаимосвязях. В операционных исследованиях можно напрямую обрабатывать случаи с сотнями и тысячами участвующих субъектов, без необходимости делать специальные приближения.
Следует отметить, что, хотя методология, представленная здесь, является довольно общей, мы пока не можем иметь дело с квантовой проблемой многих тел из-за сложности работы с принципом запрета Паули.
Материалы и методы
Переформулировка BSDE.
Связь между (нелинейными) параболическими PDE и BSDE широко исследовалась в литературе (например, ссылки 8, 9, 26 и 27). В частности, марковские BSDE дают нелинейное представление Фейнмана – Каца некоторых нелинейных параболических PDE. Пусть (Ω,F,P) — вероятностное пространство, W:[0,T]×Ω→Rd — d-мерное стандартное броуновское движение, а {Ft}t∈[0,T] — нормальная фильтрация, порожденная {Wt}t∈[0,T]. Рассмотрим следующие BSDE: Xt=ξ+∫0tµ(s,Xs) ds+∫0tσ(s,Xs) dWs,[16]Yt=g(XT)+∫tTf(s,Xs,Ys,Zs) ds−∫ tT(Zs)T dWs,[17] для которого мы ищем {Ft}t∈[0,T]-адаптированный процесс решения {(Xt,Yt,Zt)}t∈[0,T] со значениями в Rd ×Р×Рд.При подходящих предположениях о регулярности коэффициентных функций μ, σ и f можно доказать существование и с точностью до неразличимости единственность решений (см., например, ссылки 8 и 26). Кроме того, мы имеем, что нелинейное параболическое УЧП связано с ДДУ 16 и 17 в том смысле, что для всех t∈[0,T] выполняется P-п.
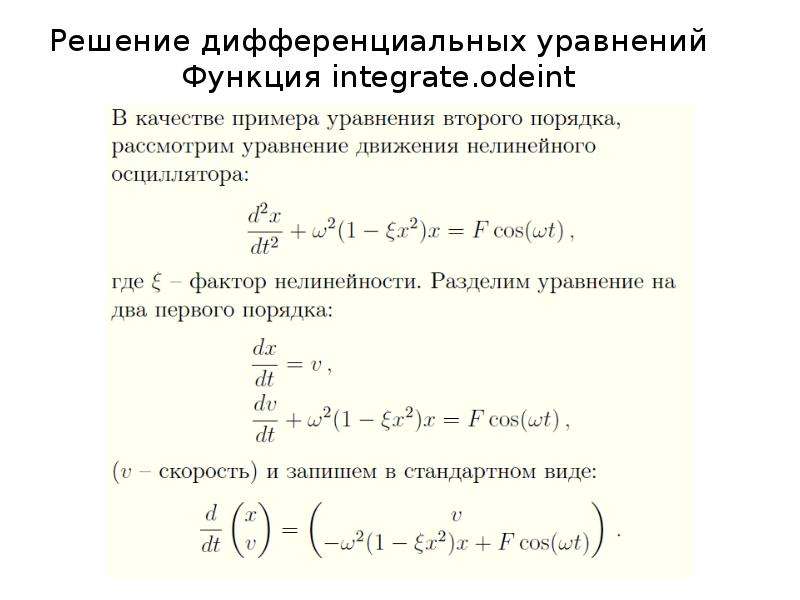 н. что Yt=u(t,Xt) и Zt=σT(t,Xt) ∇u(t,Xt)[18] (ср., например, ссылки 8 и 9). Следовательно, мы можем вычислить величину u(0,X0), связанную с уравнением. 1 до Y0 путем решения BSDE 16 и 17 .Более конкретно, мы подставляем тождества в уравнение. 18 в уравнение. 17 и переписать уравнение вперед, чтобы получить формулу в уравнении. 3 .
н. что Yt=u(t,Xt) и Zt=σT(t,Xt) ∇u(t,Xt)[18] (ср., например, ссылки 8 и 9). Следовательно, мы можем вычислить величину u(0,X0), связанную с уравнением. 1 до Y0 путем решения BSDE 16 и 17 .Более конкретно, мы подставляем тождества в уравнение. 18 в уравнение. 17 и переписать уравнение вперед, чтобы получить формулу в уравнении. 3 .Затем мы дискретизируем уравнение по времени и используем нейронные сети для аппроксимации пространственных градиентов и, наконец, неизвестной функции, как описано в методологии этой статьи.
Архитектура нейронной сети.
В этом подразделе мы кратко проиллюстрируем архитектуру метода глубокого BSDE.Для упрощения изложения мы ограничимся в этих иллюстрациях случаем, когда коэффициент диффузии σ в уравнении 1 удовлетворяет тому, что ∀ x∈Rd:σ(x)=IdRd. Рис. 4 иллюстрирует сетевую архитектуру для метода глубокого BSDE.
Рис. 4. Обратите внимание, что ∇u(tn,Xtn) обозначает переменную, которую мы аппроксимируем напрямую с помощью подсетей, а u(tn,Xtn) обозначает переменную, которую мы итеративно вычисляем в сети. В этой сети есть три типа соединений:
Обратите внимание, что ∇u(tn,Xtn) обозначает переменную, которую мы аппроксимируем напрямую с помощью подсетей, а u(tn,Xtn) обозначает переменную, которую мы итеративно вычисляем в сети. В этой сети есть три типа соединений:Иллюстрация архитектуры сети для решения полулинейных параболических уравнений в частных производных с H скрытых слоев для каждой подсети и N временных интервалов.Вся сеть имеет в общей сложности (H+1)(N−1) слоев, которые включают в себя свободные параметры, которые необходимо оптимизировать одновременно. Каждый столбец для t=t1,t2,…,tN-1 соответствует подсети в момент времени t. hn1,…,hnH — промежуточные нейроны в подсети в момент времени t=tn для n=1,2,…,N−1.
i ) Xtn→hn1→hn2→⋯→hnH→∇u(tn,Xtn) — многослойная нейронная сеть с прямой связью, аппроксимирующая пространственные градиенты в момент времени t=tn. Веса θn этой подсети — это параметры, которые мы стремимся оптимизировать.
ii ) (u(tn,Xtn),∇u(tn,Xtn),Wtn+1−Wtn)→u(tn+1,Xtn+1) — прямая итерация, дающая окончательный результат сеть как аппроксимация u(tN,XtN), полностью характеризуемая уравнениями 5 и 6 .
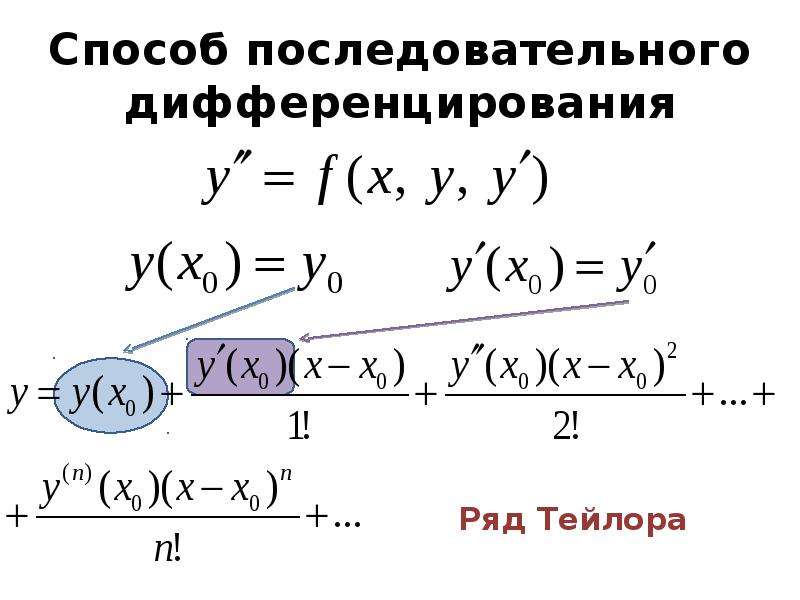 В этом типе соединения нет параметров для оптимизации.
В этом типе соединения нет параметров для оптимизации.iii ) (Xtn,Wtn+1−Wtn)→Xtn+1 — это сокращение, соединяющее блоки в разное время, которое характеризуется уравнениями 4 и 6 .В этом типе соединения также нет параметров для оптимизации.
Если мы используем H скрытых слоев в каждой подсети, как показано на рис. 4, то вся сеть имеет в общей сложности (H+1)(N−1) слоев, которые включают свободные параметры, подлежащие одновременной оптимизации.
Следует отметить, что предложенный метод глубокого РДУ можно использовать и в том случае, если нас интересуют значения решения УЧП u в области D⊂Rd в момент времени t=0, а не в одной пространственной точке ξ∈Rd . В этом случае мы выбираем X0=ξ как невырожденную D-значную случайную величину и используем две дополнительные нейронные сети, параметризованные {θu0,θ∇u0}, для аппроксимации функций D∋x↦u(0,x)∈R и D∋x↦∇u(0,x)∈Rd.Верхние и нижние границы ошибок аппроксимации алгоритмов стохастической аппроксимации для PDE и BSDE соответственно можно найти в ссылках.
 27⇓–29 и ссылки в нем.
27⇓–29 и ссылки в нем.Реализация.
Мы подробно опишем реализацию для численных примеров, представленных в этой статье. Каждая подсеть полностью связана и состоит из четырех слоев (за исключением примера в следующем подразделе), с одним входным слоем (d-мерным), двумя скрытыми слоями (оба d+10-мерными) и одним выходным слоем (d-мерным).Мы выбираем функцию выпрямителя (ReLU) в качестве нашей функции активации. Мы также приняли метод пакетной нормализации 30 в подсетях сразу после каждого линейного преобразования и перед активацией. Этот метод ускоряет обучение, позволяя увеличить размер шага и упростить инициализацию параметров. Все параметры инициализируются через нормальное или равномерное распределение без какой-либо предварительной подготовки.
Мы используем TensorFlow (31) для реализации нашего алгоритма с оптимизатором Adam (14) для оптимизации параметров.Адам — это вариант алгоритма SGD, основанный на адаптивных оценках моментов более низкого порядка. Мы устанавливаем значения по умолчанию для соответствующих гиперпараметров, как рекомендовано в ссылке.
 14 и выберите размер пакета равным 64. В каждом из представленных численных примеров средние значения и стандартные отклонения относительных ошибок L1-аппроксимации вычисляются аппроксимативно с помощью пяти независимых запусков алгоритма с различными случайными начальными значениями. Все представленные численные примеры выполняются на Macbook Pro с процессором Intel Core i5 с тактовой частотой 2,9 ГГц и 16 ГБ памяти.
14 и выберите размер пакета равным 64. В каждом из представленных численных примеров средние значения и стандартные отклонения относительных ошибок L1-аппроксимации вычисляются аппроксимативно с помощью пяти независимых запусков алгоритма с различными случайными начальными значениями. Все представленные численные примеры выполняются на Macbook Pro с процессором Intel Core i5 с тактовой частотой 2,9 ГГц и 16 ГБ памяти.Эффект количества скрытых слоев.
Точность метода глубокого BSDE, безусловно, зависит от количества скрытых слоев в аппроксимации подсети (уравнение). 7 . Чтобы проверить этот эффект, мы решаем УЧП типа реакция-диффузия с другим количеством скрытых слоев в подсети. УЧП представляет собой многомерную версию (d=100) примера, проанализированного численно в Гобете и Туркеджиеве (32) (d=2),∂u∂t(t,x)+12 Δu(t,x)+min 1,u(t,x)−u*(t,x)2=0,[19]в котором u*(t,x) — явное осциллирующее решение u*(t,x)=κ+sin λ∑i =1dxiexp λ2d(t−T)2.[20] Параметры выбираются так же, как в исх.
Таблица 1. 32: κ=1,6, λ=0,1, T=1. В каждой подсети используется остаточная структура с пропущенным соединением, при этом каждый скрытый слой имеет d нейронов. Мы увеличиваем количество скрытых слоев в каждой подсети с нуля до четырех и сообщаем об относительной ошибке в таблице 1. Очевидно, что точность аппроксимации увеличивается по мере увеличения количества скрытых слоев в подсети.
32: κ=1,6, λ=0,1, T=1. В каждой подсети используется остаточная структура с пропущенным соединением, при этом каждый скрытый слой имеет d нейронов. Мы увеличиваем количество скрытых слоев в каждой подсети с нуля до четырех и сообщаем об относительной ошибке в таблице 1. Очевидно, что точность аппроксимации увеличивается по мере увеличения количества скрытых слоев в подсети.Среднее значение и SD относительной ошибки для PDE в уравнении. 19, полученный методом глубокого BSDE с разным количеством скрытых слоев
Благодарности
Работа Дж.Х. и В.Э. частично поддерживается грантом
005 Национального фонда естественных наук Китая (NNSFC), грантом Министерства энергетики США (DOE) DE-SC0009248 и грантом Управления военно-морских исследований США (ONR) N00014-13-1-0338.
Сноски
Вклад авторов: J.H., A.J., and W.E. разработал исследование, провел исследование и написал статью.
Авторы заявляют об отсутствии конфликта интересов.

Эта статья является прямой отправкой PNAS.
Использование нейронных сетей для решения обыкновенных дифференциальных уравнений | by Caio Davi
Мы собираемся реализовать описанный метод на python с использованием библиотеки TensorFlow. Чтобы лучше понять метод, мы будем использовать низкоуровневый дизайн, избегая ряда возможных оптимизаций, предоставляемых библиотекой. На данный момент мы сосредоточены на четком понимании и реализации нейронной сети ODE-solver. По этой причине мы также выберем простое ОДУ:
Мы можем легко решить эту проблему, интегрируя обе части решения, что приводит к u + C = x ²+ C , и после подгонки C для выполнения начального условия имеем u = x ²+1.Тем не менее, вместо того, чтобы решать ее аналитически, давайте попробуем решить с помощью нейронных сетей.
Изображение автораВ этом примере мы создадим нейронную сеть MLP с двумя скрытыми слоями, сигмовидными функциями активации и алгоритмом оптимизатора градиентного спуска.
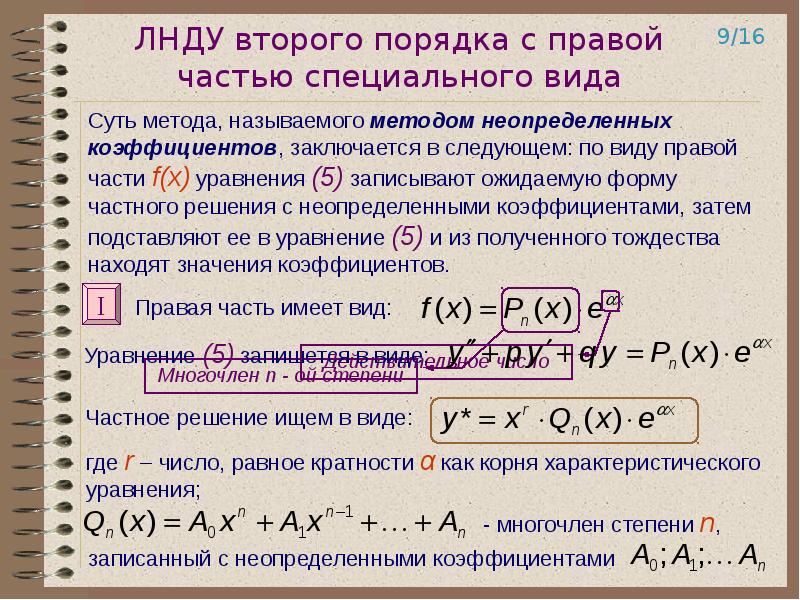 Можно использовать и другие топологии, это всего лишь пример. Мы рекомендуем вам попробовать разные подходы к этому методу.
Можно использовать и другие топологии, это всего лишь пример. Мы рекомендуем вам попробовать разные подходы к этому методу.Определение переменных
f0 = 1
inf_s = np.sqrt(np.finfo(np.float32).eps)
learning_rate = 0.01
training_steps = 5000
batch_size = 100
display_step = 500# Network Parameters
n_input = 1 # число нейронов входного слоя
n_hidden_1 = 32 # число нейронов 1-го слоя
n_hidden_hidden нейроны
n_output = 1 # выходной слой число нейронов с весами = {
'h2': tf.Variable(tf.random.normal([n_input, n_hidden_1])),
'h3': tf.Variable(tf.random.normal ([n_hidden_1, n_hidden_2])),
'выход': tf.Variable(tf.random.normal([n_hidden_2, n_output]))
}biases = {
'b1': tf.Variable(tf.random.normal([n_hidden_1])),
'b2': tf.Variable( tf.random.normal([n_hidden_2])),
'out': tf.Variable(tf.random.normal([n_output]))
}# Оптимизатор стохастического градиентного спуска.
оптимизатор = tf.optimizers.SGD(learning_rate)Определение модели и функции потерь
# Создать модель
def multilayer_perceptron(x):
x = np.array([[[x]]], dtype= 'поплавок32')
layer_1 = tf.добавить (tf.matmul (x, веса ['h2']), смещения ['b1'])
layer_1 = tf.nn.sigmoid (layer_1)
layer_2 = tf.add (tf.matmul (layer_1, веса [' h3']), смещения['b2'])
layer_2 = tf.nn.sigmoid(layer_2)
output = tf.matmul(layer_2, weights['out']) + смещения['out']
return tf. nn.sigmoid(output)# Универсальный аппроксиматор
def g(x):
return x * multilayer_perceptron(x) + f0# Учитывая EDO
def f(x):
return 2*x# Пользовательская функция потерь для аппроксимации производных
def custom_loss(): суммирование
= []
для x в np.linspace(-1,1,10):
dNN = (g(x+inf_s)-g(x))/inf_s
summation.append((dNN - f(x))**2)
return tf.sqrt (tf.reduce_mean(tf.abs(summation)))Обратите внимание, что у нашей функции потерь нет параметров.
 Обычно функция потерь сравнивает прогноз с фактическими данными. В нашем случае точки данных не нужны.
Обычно функция потерь сравнивает прогноз с фактическими данными. В нашем случае точки данных не нужны.Поскольку мы знаем функцию ОДУ, управляющую этой моделью, мы можем вычислить ожидаемое значение в каждой точке x .Вы также можете заметить, что мы всегда рассчитываем убыток, используя 10 пунктов в интервале {-1,1}. Этого может не хватить для всех возможных функций, но, учитывая простоту нашего примера, я думаю, все будет в порядке.
Производная нейронной сети выражается переменной dNN в коде. Мы просто используем определение дифференцирования:
Train Function
def train_step():
с tf.GradientTape() как лента:
loss = custom_loss()
trainable_variables=list(weights.значения())+список(предубеждения.значения())
градиенты = лента.градиент(потери, обучаемые_переменные)
оптимизатор.применить_градиенты(zip(градиенты, обучаемые_переменные))# Обучение модели:
для я в диапазоне(обучающие_шаги):
train_step()
if i % display_step == 0:
print("loss: %f " % (custom_loss()))График результатов
# Истинное решение (найдено аналитически)
def true_solution(x ):
возврат x**2 + 1X = np.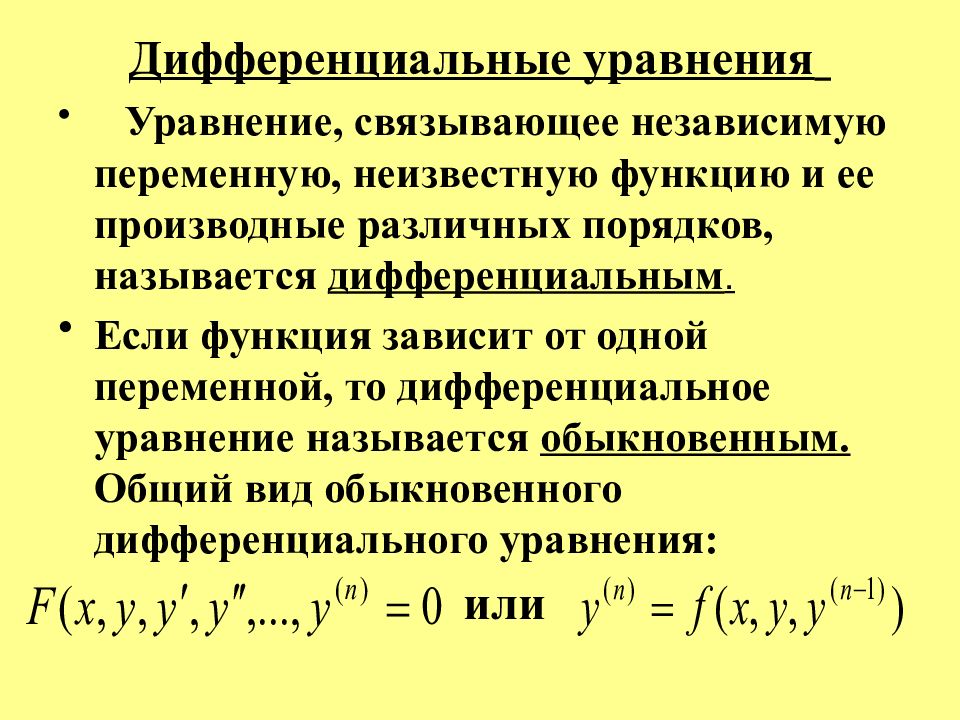 linspace(0, 1, 100)
linspace(0, 1, 100)
результат = []
для i в X: результат
.append(g(i).numpy()[0][0][0])
S = true_solution(X)plt.plot(X, результат)
plt.plot(X, S)
plt.show()Это даст нам следующий график:
Изображение автораЭто довольно приблизительно, в основном, если мы помним, что для обучения не использовался набор данных. Было бы даже лучше, если бы мы использовали больше точек коллокации для вычисления функции потерь или если бы мы продлили обучение немного дольше. Мы предлагаем читателю опробовать код и внести эти коррективы или даже попробовать другие ОДУ.Вы можете найти все содержимое этого поста в блокноте Google Collab здесь. Развлекайся! И спасибо за чтение.
Алгебра среднего уровня
Урок 19. Решение систем линейных уравнений
с двумя переменными
WTAMU > Виртуальная математическая лаборатория > Алгебра среднего уровняЦели обучения
После завершения этого руководства вы сможете: - Определите, является ли упорядоченная пара решением системы линейных уравнений
в
две переменные или нет.
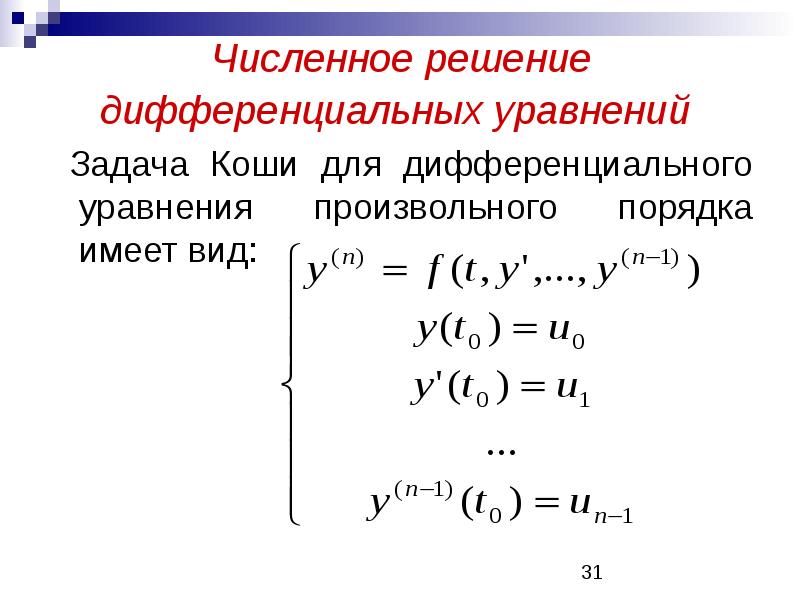
- Решите систему линейных уравнений с двумя переменными с помощью графика.
- Решите систему линейных уравнений с двумя переменными заменой метод.
- Решите систему линейных уравнений с двумя переменными методом исключения метод.
Введение
В этом уроке мы будем специально рассматривать системы, которые имеют два уравнения и два неизвестных. Урок 20. Решение систем Линейный Уравнения с тремя переменными охватывают системы с тремя уравнения и три неизвестных. Мы рассмотрим их решение в трех разных способы: график, метод замещения и метод исключения. Это приведет нас к решению текстовых задач с системами, которые быть показано в .
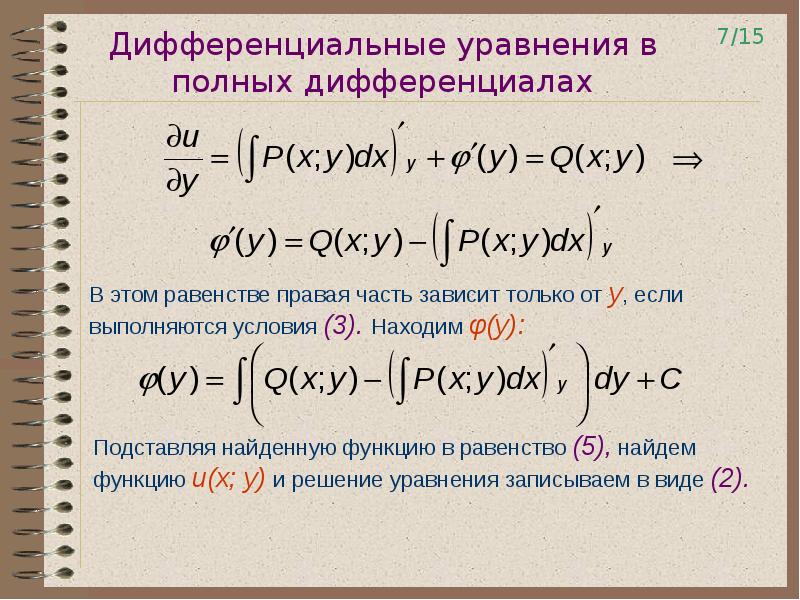 Учебник 21: Системы линейных уравнений и задача
Решение .
Вот где мы получаем ответ на печально известный вопрос, когда мы будем использовать
это? Но сначала мы должны научиться работать с системами в
Общее.
Вот почему на данном этапе мы используем общие переменные, такие как x и y . Если
вы знаете, как это сделать в целом, то, когда у вас есть конкретная
проблема
что вы решаете, где переменные приобретают значение, например, время или
Деньги
(две вещи, которых нам всегда не хватает) вы будете готовы
идти. Итак, давайте посмотрим на
системы в целом, чтобы подготовить нас к грядущим проблемам со словом
из нас.
Учебник 21: Системы линейных уравнений и задача
Решение .
Вот где мы получаем ответ на печально известный вопрос, когда мы будем использовать
это? Но сначала мы должны научиться работать с системами в
Общее.
Вот почему на данном этапе мы используем общие переменные, такие как x и y . Если
вы знаете, как это сделать в целом, то, когда у вас есть конкретная
проблема
что вы решаете, где переменные приобретают значение, например, время или
Деньги
(две вещи, которых нам всегда не хватает) вы будете готовы
идти. Итак, давайте посмотрим на
системы в целом, чтобы подготовить нас к грядущим проблемам со словом
из нас.Учебник
Система линейных уравнений Система линейных уравнений состоит из двух или более линейных уравнения, которые решаются одновременно.
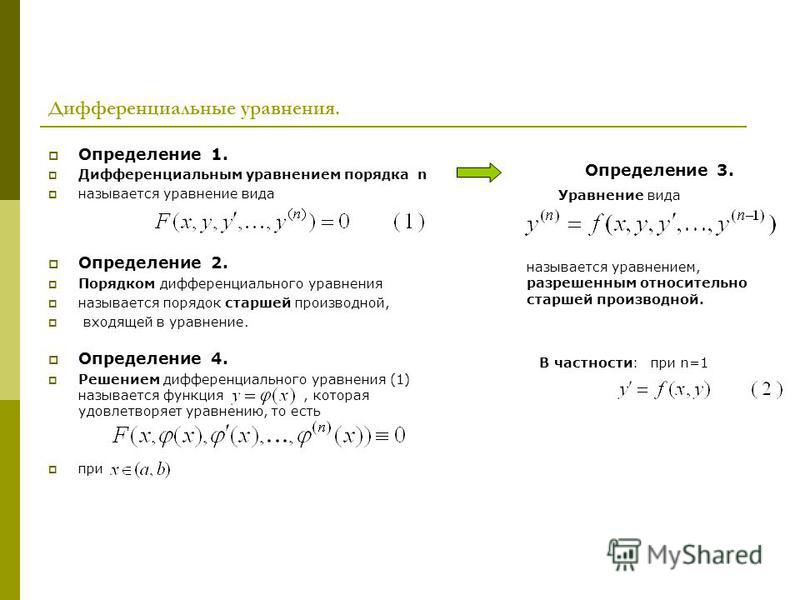
В этом руководстве мы рассмотрим системы, которые иметь только два линейных уравнения и два неизвестных.
В общем случае решение системы с двумя переменными заказанный пара, которая делает ОБА уравнения истинными.
Другими словами, это место пересечения двух графиков, что у них есть в общем. Итак, если упорядоченная пара является решением одного уравнения, но не другое, то это НЕ решение системы.
Согласованная система — это система, которая имеет в хотя бы одно решение.
Несогласованная система — это система, в которой имеет нет решения .

Уравнения системы зависимы если ВСЕ решения одного уравнения являются также решениями другого уравнения. В разное слова, они заканчиваются одной и той же строкой .
Уравнения системы независимы , если они не делятся ВСЕ решения . Они могут иметь одну общую точку, но не все их.
Одно решение
Если система с двумя переменными имеет одно решение, то она заказанный пара, являющаяся решением ОБОИХ уравнений. Другими словами, когда вы подставляете значения упорядоченной пары, это делает ОБА уравнения ИСТИННЫЙ.Если вы получите одно решение для вашего окончательного ответа, эта система последовательная или непоследовательная?
Если вы сказали «последовательный», похлопайте себя по спине!Если вы получите одно решение для окончательного ответа, уравнения зависимы или независимы?
Если вы сказали независимый, вы правы!На приведенном ниже графике показана система двух уравнений и два неизвестных имеет одно решение:
Нет решения
Если две линии параллельны друг другу, они никогда не пересекаются.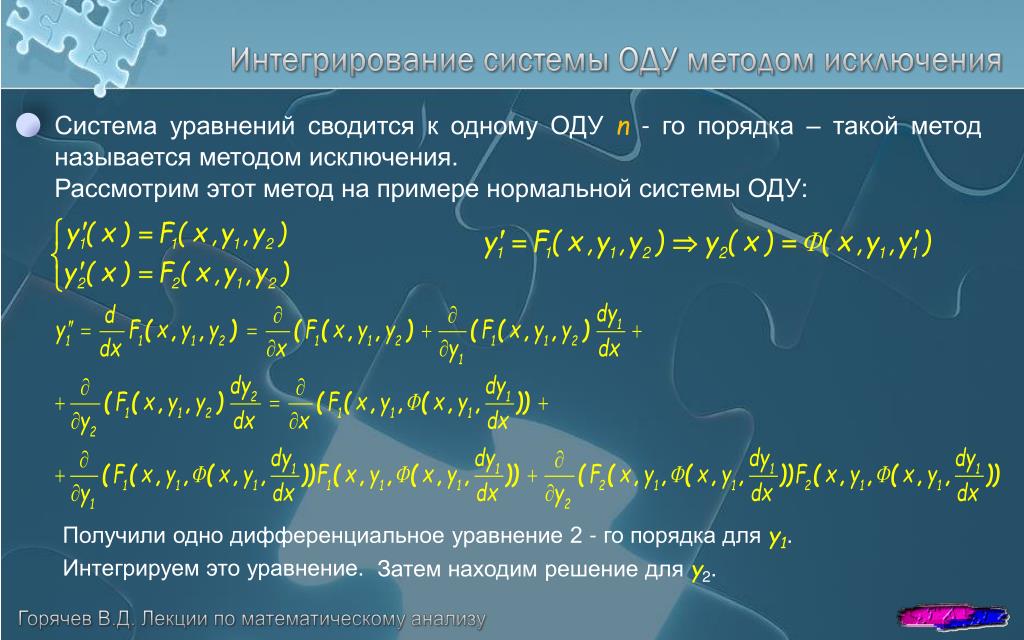 Это означает, что у них нет общих точек. В этом
ситуация,
у вас не было бы решения.
Это означает, что у них нет общих точек. В этом
ситуация,
у вас не было бы решения. Если вы не получили решения для своего окончательного ответа, эта система последовательная или непоследовательная?
Если вы сказали непоследовательный, вы правы!Если вы не получите решения для своего окончательного ответа, уравнения зависимы или независимы?
Если вы сказали независимый, вы правы!На приведенном ниже графике показана система двух уравнений и два неизвестных не имеет решения:
Бесконечно Решения
Если две линии окажутся лежащими друг над другом, то Там есть бесконечное количество решений. В этой ситуации они
было бы
в конечном итоге будет одна и та же строка, поэтому любое решение, которое будет работать в одном
уравнение
будет работать в другом.
В этой ситуации они
было бы
в конечном итоге будет одна и та же строка, поэтому любое решение, которое будет работать в одном
уравнение
будет работать в другом. Если вы получаете бесконечное количество решений для ваш окончательный ответ, я с эта система последовательная или непоследовательная?
Если вы сказали последовательно, вы правы!Если вы получаете бесконечное количество решений для ваш окончательный ответ, будет уравнения зависимы или независимы?
Если вы сказали зависимый, вы правы!На приведенном ниже графике показана система двух уравнений и два неизвестных имеющее бесконечное число решений:
Пример 1 : определить, является ли каждая упорядоченная пара решением.  из
система.
из
система.
(3, -1) и (0, 2)Проверим упорядоченную пару (3, -1) в первой уравнение:
* Вставьте 3 для x и -1 для y*Правдивое утверждение
Пока все хорошо, (3, -1) является решением задачи первое уравнение x + y = 2.
Теперь проверим (3, -1) во втором уравнении:
* Вставьте 3 для x и -1 для y*Правдивое утверждение
Эй, мы получили еще одно истинное утверждение, которое означает (3, -1) также решение второго уравнения х – у = 4.
Вот большой вопрос, является ли (3, -1) решением данная система?????
Поскольку это было решение ОБОИХ уравнений в системе, Затем это является решением общей системы.Теперь подставим (0, 2) в первое уравнение:
*Подставьте 0 для x и 2 для y
*True StatementЭто верное утверждение, поэтому (0, 2) является решением первое уравнение х + у = 2.
Наконец, подставим (0,2) во второе уравнение:
*Подставьте 0 для x и 2 для y
*Ложное утверждениеНа этот раз мы получили ложное заявление, вы знаете, что это означает.
 (0, 2) НЕ является решением второго уравнения x – y = 4.
(0, 2) НЕ является решением второго уравнения x – y = 4. Вот большой вопрос, является ли (0, 2) решением данная система?????
Так как это не было решением ОБОИХ уравнений в система, то это не решение всей системы.
Три способа Решение систем линейных уравнений
Уравнения с двумя переменнымиШаг 1: Нарисуйте первое уравнение.
Шаг 2: Нарисуйте график второго уравнения на та же координата система как первая.
Вы рисуете второе уравнение так же, как и любое другое уравнение. Обратитесь к первому шагу, если вам нужно просмотреть различные способы график линия.
Разница здесь в том, что вы поставите его на тот же система координат как первый. Это как иметь две графические задачи в одной.
Шаг 3: Найдите решение.
Если две линии пересекаются в одном месте , то точка г. пересечение является решением системы.
Если две линии параллельны , то они никогда не пересекаются, поэтому нет нет решения.
Если две строки лежат друг над другом , то они та же строка , и у вас есть бесконечное количество решений. . В этом случае вы можете записать любое уравнение как решение указывать это одна и та же линия.
Шаг 4: Проверьте предложенный заказ парное решение в ОБА уравнения.
Предлагаемое решение можно подключить к ОБОИМ уравнения. Если это делает ОБА уравнения истинными, тогда у вас есть решение для система.
Если хотя бы одно из них окажется ложным, вам нужно идти вернуться и повторить проблема.
Пример 2 : Решите систему уравнений с помощью графика.
*Подключить 0 для y для x -int
* x -interceptПересечение x равно (3, 0).
у -перехват
*Вставьте 0 для x для y -int
* y -interceptПересечение y равно (0, 3).

Найти другой решение, если x = 1.
*Вставка 1 для xДругое решение (1, 2).
Решения:
х г (х, у) 3 0 (3, 0) 0 3 (0, 3) 1 2 (1, 2) Построение упорядоченных парных решений и рисование линия:
*Подключить 0 для y для x -int
* x -interceptПересечение x равно (1, 0).

Y-пересечение
*Подключить 0 для x для y -int*Инверсия множ. на -1 это дел. по -1
* у -перехват
Пересечение y равно (0, -1).
Найти другой решение, если x = 2.
*Вставьте 2 для x
*Инверсия добавления 2 является вспомогательной. 2
2 *Инверсия множ. на -1 это деление по -1
Другое решение (2, 1).
Решения:
х г (х, у) 1 0 (1, 0) 0 -1 (0, -1) 2 1 (2, 1) Построение упорядоченных парных решений и рисование линия:
Мы должны спросить себя, есть ли место, где две линии пересекаются, и если да, то где?
Да, они пересекаются в точке (2, 1).

Вы обнаружите, что если вставить заказанную пару (2, 1) в ОБА уравнения исходной системы, что это решение ОБЕИХ из них.
Решение этой системы (2, 1).
Пример 3 : Решите систему уравнений с помощью графика.
*Подключить 0 для y для x -int
* x -interceptПересечение x равно (5, 0).
у -перехват
*Вставить 0 для x для y -int* у -перехват
Точка пересечения y равна (0, 5).
Найти другой решение, если x = 1.
*Вставка 1 для x
*Инверсия добавления 1 является вспомогательной. 1Другое решение (1, 4).
Решения:
х г (х, у) 5 0 (5, 0) 0 5 (0, 5) 1 4 (1, 4) Построение упорядоченных парных решений и рисование линия:
*Подставьте 0 для y для x -int
*Инверсия добавления 3 является вспомогательной. 3
3 *Инверсия множ. на -1 это дел. по -1
* х – перехват
Пересечение x равно (3, 0).
у -перехват
*Вставьте 0 для x для y -int
* y -interceptПересечение y равно (0, 3).
Найти другой решение, если x = 1.
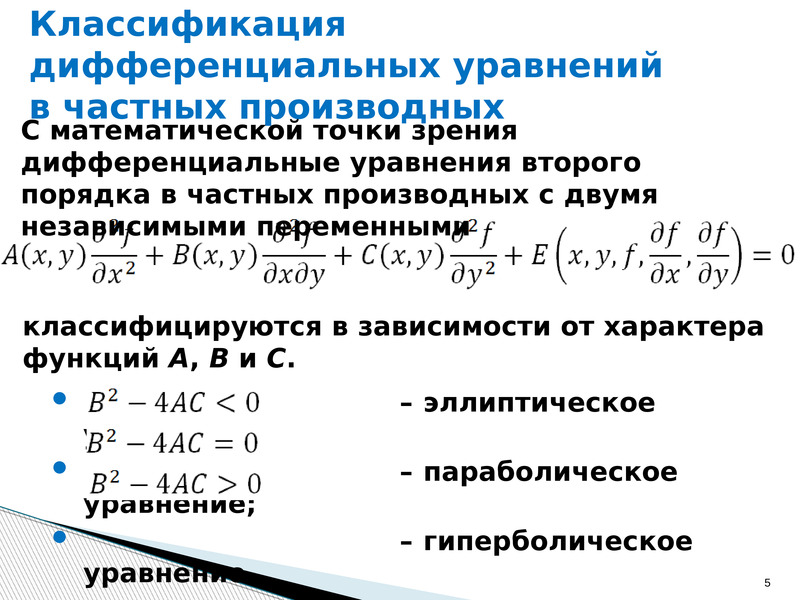
*Вставка 1 для xДругое решение (1, 2).
Решения:
х г (х, у) 3 0 (3, 0) 0 3 (0, 3) 1 2 (1, 2) Построение упорядоченных парных решений и рисование линия:
Мы должны спросить себя, есть ли место, где две линии пересекаются, и если да, то где?
Нет, они не пересекаются.
 Мы
иметь два параллельных
линии.
Мы
иметь два параллельных
линии.
Нет заказанных пар для проверки.
Ответ – нет решения.
Решить методом подстановки Шаг 1: При необходимости упростите.
Это включает удаление ( ) и удаление дробей.
Чтобы удалить ( ): просто используйте свойство дистрибутива.
Чтобы удалить дроби: так как дроби — это еще один способ написать деление, и обратным делением является умножение, вы удаляете дроби на умножение с обеих сторон ЖК-дисплеем всех ваших фракций.
Шаг 2. Решите одно уравнение для либо переменная.
Неважно, какое уравнение вы используете или какое переменная, которую вы выбираете решить для.
Вы хотите сделать это как можно проще.Если один уравнений уже решен для одной из переменных, то есть быстро и легко способ идти.
Если вам нужно найти переменную, попробуйте выбрать тот, у которого есть 1 в качестве коэффициента.
 Таким образом, когда вы идете, чтобы решить это, вы
не будет
делить на число и рисковать работать с
дробная часть
(фу!!).
Таким образом, когда вы идете, чтобы решить это, вы
не будет
делить на число и рисковать работать с
дробная часть
(фу!!).Шаг 3: Замените то, что вы получаете шаг 2 в другое уравнение.
Вот почему он называется методом подстановки. Убедись в том, что вы подставляете выражение в ДРУГОЕ уравнение, то, которое вы не использовать на шаге 2.
Это даст вам одно уравнение с одним неизвестным.
Шаг 4. Определите оставшаяся переменная.

Шаг 5. Решите для секунд Переменная.
Если вы найдете значение для переменной на шаге 4, значит два уравнения имеют одно решение. Подставьте найденное значение в шаг 4 в любое из уравнений задачи и решить для другого Переменная.
Если ваша переменная выпадает и у вас FALSE заявление, значит ваш ответ не является решением.
Если ваша переменная выпадает и у вас ИСТИНА заявление, значит ваш ответ – бесконечные решения, которые были бы уравнением линия.
Шаг 6: Проверьте предложенный заказ парное решение в ОБА исходные уравнения.

Предлагаемое решение можно подключить к ОБОИМ уравнения. Если это делает ОБА уравнения верными, тогда у вас есть решение система.
Если хотя бы одно из них окажется ложным, вам нужно идти вернуться и повторить проблема.
Пример 4 : Решить систему уравнений подстановкой метод.
Оба эти уравнения уже упрощены. Нет нужды в работе сделать здесь.
Обратите внимание, что второе уравнение уже решено для y .
 Мы можем использовать его для этого шага.
Мы можем использовать его для этого шага.Неважно, какое уравнение или какую переменную вы выбрать решение за. Но в ваших интересах, чтобы все было так просто, как возможный.
Решение второго уравнения для y :
*Решено для y
Подставьте выражение 2 x + 4 вместо y в первое уравнение и решите для x :
(когда вы подставляете такое выражение, это как если бы вы подставляли в число для вашей переменной)
*Под. 2 x + 4 дюйма
для y
2 x + 4 дюйма
для y
*Расст. от -5 до ( )
* Объединить подобные термины*Инверсия суб. 20 добавить 20
*Инверсия дел. на -7 мульт. по -7
Вставьте -5 для x в уравнение в Шаг 2, чтобы найти значение и .
*Вставка -5 для x
Вы обнаружите, что если подключить заказанную пару (-5, -6) в ОБЕИХ уравнений исходной системы, что это решение ОБЕИХ их.
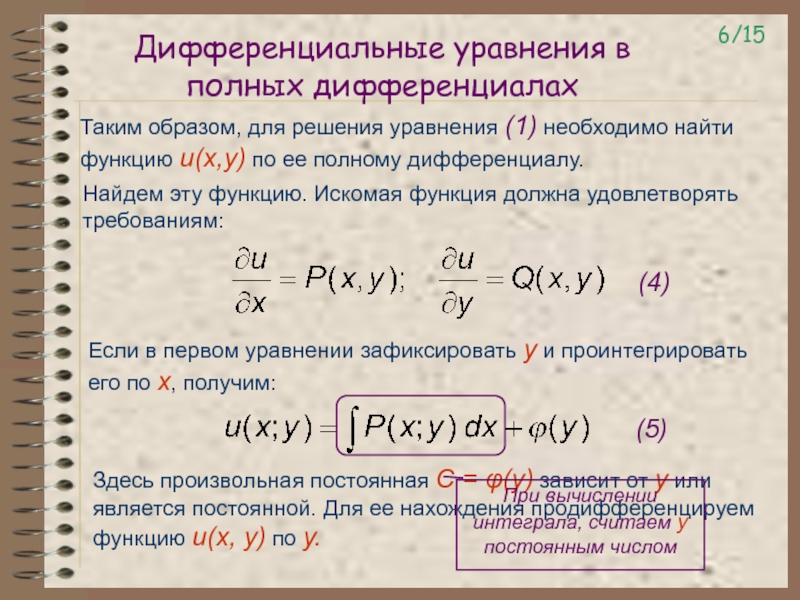
(-5, -6) — это решение для нашей системы.
Пример 5 : Решите систему уравнений подстановкой метод.
Оба эти уравнения уже упрощены. Нет нужды в работе сделать здесь.
На этот раз проблема не была нам так приятна, мы придется немного поработайте, чтобы решить одно уравнение для одной из наших переменных.
Неважно, какое уравнение или какую переменную вы выбрать решение за.
 Просто будь проще.
Просто будь проще.Начиная с x в первом уравнение имеет коэффициент 1, это означало бы, что нам не пришлось бы делить на номер решить для него и рискнуть работать с дробями (ФУТ!!) Самый простой путь здесь — решить первое уравнение для x , и мы определенно хотим пойти по легкому пути. Вы бы не были неправильный либо выбрать другое уравнение и/или решить для y, снова вы хотите чтобы это было как можно проще.
Решая первое уравнение для х получаем:
*Обратное значение вспомогательного. 2 y добавить 2 y*Решено для x
Подставьте выражение 5 + 2 y вместо x во второе уравнение и решите для y :
(когда вы подставляете такое выражение, это как если бы вы подставляли в число для вашей переменной)
*Под. 5 + 2 y для x
5 + 2 y для x *Переменная исключена И ложно
Минуточку, а куда делись наши переменная идет????
Как упоминалось выше, если ваша переменная выпадает, и вы иметь ЛОЖНОЕ утверждение, тогда решения нет. Если бы мы построили график этих двух, они будут параллельны друг другу.
Так как мы не получили значение для y , там тут нечего втыкать.
Нет заказанных пар для проверки.

Ответ – нет решения.
Решить методом исключения Этот метод также известен как добавление или устранение добавлением метод.
Шаг 1: Упростите и поместите оба уравнения в виде A x + B y = C при необходимости.
Это включает удаление ( ) и удаление дробей.
Чтобы удалить ( ): просто используйте свойство дистрибутива.

Чтобы удалить дроби: так как дроби — это еще один способ написать деление, и обратным делением является умножение, вы удаляете дроби на умножение с обеих сторон ЖК-дисплеем всех ваших фракций.
Шаг 2: Умножьте одно или оба уравнения по числу это создаст противоположные коэффициенты для x или y , если это необходимо.
Забегая вперед, мы добавим эти два уравнения вместе . В этом процессе нам нужно убедиться, что одна из переменных вне, оставив нам одно уравнение и одно неизвестное. Единственный способ, которым мы можем гарантия, что если мы складываем противоположности .
 Сумма
противоположности
равно 0.
Сумма
противоположности
равно 0.Если ни одна переменная не выпадет, то мы застряли с уравнение с два неизвестных неразрешима.
Неважно, какую переменную вы выберете для удаления вне. Вы хотите, чтобы это было как можно проще. Если переменная уже имеет противоположные коэффициенты, чем перейти к сложению двух уравнений вместе. Если это не так, вам нужно умножить одно или оба уравнения на число тот создаст противоположные коэффициенты в одной из ваших переменных.Ты может Думайте об этом как о ЖК-дисплее. Подумай, какой номер у оригинала коэффициенты оба входят и соответственно умножают каждое отдельное уравнение. Сделать убедитесь, что одна переменная положительна, а другая отрицательна, прежде чем вы добавлять.
Например, если у вас есть 2 x в одном уравнении и 3 x в другом уравнении, мы могли бы умножить первое уравнение на 3 и получаем 6 x и в второе уравнение на -2, чтобы получить -6 x . Так когда вы добавите эти два вместе, они выпадут.
Сложите два уравнения вместе.
Переменная с противоположными коэффициентами будет выпадать из этого шаг, и у вас останется одно уравнение с одним неизвестным.
Шаг 4: Найдите оставшуюся переменную.
Решите уравнение, найденное на шаге 3, для переменной что осталось.
Если вам нужен обзор этого, перейдите к Tutorial 7: Линейные уравнения с одной переменной.
Если обе переменные выпадают и у вас ЛОЖЬ заявление, значит ваш ответ не является решением.
Если обе переменные выпадают и у вас есть ИСТИНА заявление, значит ваш ответ – бесконечные решения, которые были бы уравнением линия.
Шаг 5: Найдите вторую переменную.
Если вы найдете значение для переменной на шаге 4, значит два уравнения имеют одно решение. Подставьте найденное значение в шаг 4 в любое из уравнений задачи и решить для другого Переменная.
Шаг 6: Проверьте предложенный заказ парное решение в ОБА исходные уравнения.
Предлагаемое решение можно подключить к ОБОИМ уравнения.Если это делает ОБА уравнения верными, тогда у вас есть решение система.
Если хотя бы одно из них окажется ложным, вам нужно идти вернуться и повторить проблема.
Пример 6 : Решить систему уравнений методом исключения метод.
Это уравнение полно этих неприятных дробей. Мы можем упростить оба уравнения путем умножения каждого отдельного на его ЖК-дисплей, точно так же, как вы можете сделать, когда вы работаете с одним уравнением. До тех пор, как вы сделайте то же самое с обеими частями уравнения, вы сохраните две стороны равны друг другу.
Умножив каждое уравнение на соответствующий ЖК-дисплей, мы получить:
* Множ. по ЖК 15*Мульт. по ЖК 6
Опять же, вы хотите сделать это так же просто, как возможный.Обратите внимание, как коэффициенты для обоих и равны 3. Мы должны быть противоположности, поэтому, если одна из них равна 3, а другая -3, Oни отменяли бы друг друга, когда мы собираемся добавить их.
Если бы мы сложили их так, как сейчас, мы бы закончить с одно уравнение и две переменные ничего бы не выпадало. И мы было бы не суметь ее решить.
Предлагаю умножить второе уравнение на -1, это было бы создайте -3 перед x и мы имеют наши противоположности.
Обратите внимание, что мы могли бы так же легко умножить первое уравнение на -1 и не второй. В любом случае работа будет выполнена.
Умножая второе уравнение на -1 получаем:
* Множ.обе стороны 2-го уравнения. по -1* у х иметь напротив коэффициенты
*Обратите внимание, что и выбыл
*Инверсия множ.на 3 дел. по 3
Вы можете выбрать любое уравнение, используемое в этой задаче, чтобы подставьте найденное значение x .
Я решил подключить 11 для x к первое упрощенное уравнение (найденное на шаге 1) для нахождения y s ценность.
*Вставка 11 для x*Обратное значение сложения 55 является вспомогательным.55
*Инверсия множ. на 3 дел. по 3
Вы обнаружите, что если подключить заказанную пару (11, -25/3) в ОБА уравнений исходной системы, что это решение ОБЕИХ их.
(11, -25/3) является решением для нашей системы.
Пример 7 : Решить систему уравнений методом исключения метод.
Эта задача уже упрощена.Тем не менее, второй уравнение не записывается в виде Ax + By = C. Другими словами, нам нужно написать в этой форме, так что все готово к работе, когда мы добавим два уравнения вместе.
Переписывая второе уравнение, получаем:
*Инверсия сложения 6 x является вспомогательной.6 х*Все совпадает
Обратите внимание, что если мы умножим первое уравнение на 2, то Мы будем иметь a -6 x , что противоположно 6 x , найденному во втором уравнении.
Умножая первое уравнение на 2 получаем:
*Множ.1-е уравнение по 2
* x имеют противоположные коэффициенты
*Переменные исключены И истинны
Эй, куда делись наши переменные идти??
Как упоминалось выше, если переменная выпадает И мы иметь ИСТИННОЕ утверждение, тогда когда имеют бесконечное число решений.Они в конечном итоге та же линия.
Здесь нет значения для подстановки.
Здесь нет значения для подстановки.
Когда они окажутся одним и тем же уравнением, у вас будет бесконечное число решений.Вы можете записать свой ответ, написав либо уравнение, чтобы указать, что это одно и то же уравнение.
Ответ можно записать двумя способами: {( x , y )| 3 x – 2 y = 1} ИЛИ {( x , y ) | 4 у = 6 х – 2}.
Практические задачиЭто практические задачи, которые помогут вам следующий уровень. Это позволит вам проверить и понять, понимаете ли вы эти виды проблем. Математика работает так же, как что-либо иначе, если вы хотите добиться успеха в этом, вам нужно практиковаться Это. Даже лучшие спортсмены и музыканты получали помощь на этом пути и много практиковаться, практиковаться, практиковаться, чтобы преуспеть в своем виде спорта или игре на инструменте. На самом деле практики много не бывает.
Чтобы получить максимальную отдачу от них, вы должны работать проблема на свой собственный, а затем проверьте свой ответ, нажав на ссылку для ответ/обсуждение для этой проблемы . По ссылке вы найдете ответ а также любые шаги, которые привели к поиску этого ответа.
Практика Задача 1a: Решите систему, построив график.
Практика Задача 2а: Решить систему подстановкой метод.
Практика Задача 3а: Решите систему с помощью метод исключения.
Нужна дополнительная помощь по этим темам?
Последняя редакция Ким Сьюард от 10 июля 2011 г.
Авторское право на все содержимое (C) 2001–2011, WTAMU и Ким Сьюард. Все права защищены.Сколько существует способов решения дифференциальных уравнений? – М.В.Организинг
Сколько существует способов решения дифференциальных уравнений?
два метода
Можете ли вы выучить дифференциальные уравнения?
Оригинальный ответ: Как я могу самостоятельно выучить дифференциальные уравнения? Вы можете либо прочитать книгу о дифференциальных уравнениях, либо поискать темы в Интернете и изучить их.Я предлагаю вам поискать темы в Интернете, и когда у вас есть представление о том, как решить, перейдите к книгам.
Насколько сложны дифференциальные уравнения?
В целом, дифференциальные уравнения считаются несколько более сложными, чем исчисление 2 (интегральное исчисление). Если вы хорошо справились с исчислением 2, вполне вероятно, что вы хорошо справитесь с дифференциальными уравнениями. На самом деле есть ряд факторов, которые будут влиять на сложность класса для вас.
Что я должен изучить перед дифференциальными уравнениями?
2 ответа
- Вы должны уметь вычислять основные функции, например xn, expx, logx, тригонометрические и гиперболические функции, включая производные и определенное и неопределенное интегрирование.
- Цепное правило, правило произведения, интегрирование по частям.
- Серия Taylor и расширения серии.
Какая математика нужна для дифференциальных уравнений?
Необходимыми условиями являются исчисление и линейная алгебра. Никаких других предпосылок не требуется. Это не очень сложный курс, поэтому его стоит пройти сразу после изучения линейной алгебры. (Прикладная математика 33-34 — это годичный курс с настолько похожим содержанием, что вам не следует проходить его и математику 111 одновременно.
Чему учат дифференциальные уравнения?
Дифференциальное уравнение — это уравнение, в которое входят производные функции, а также сама функция. Прямой метод Эйлера — это численный метод решения обыкновенных дифференциальных уравнений. Разделение переменных — метод решения дифференциальных уравнений.
Вам нужна линейная алгебра для дифференциальных уравнений?
Должен ли я сдавать линейную алгебру перед дифференциальными уравнениями? Дифференциальные уравнения и линейная алгебра более или менее независимы друг от друга.Некоторые школы могут порекомендовать учащимся сначала пройти линейную алгебру, но это не обязательно.
Что сложнее: дифференциальные уравнения или линейная алгебра?
Diff eq был самым сложным математическим курсом, который нам приходилось сдавать в течение первых двух лет, но линейная алгебра была легче, чем mth 251, который был вторым по сложности. Я уничтожил линейную алгебру и получил 99% в классе. Наш курс дифференциальных уравнений использовал линейную алгебру для решения систем дифференциальных уравнений.
Calc 3 сложнее, чем дифференциальные уравнения?
Дифференциальные уравнения немного проще, чем calc 3, но знание частичных дробей помогает в дифференциальных уравнениях.Полезно знать, спасибо! Я нашел Calc 3 действительно крутым. Трехмерная геометрия, векторы, тройные интегралы (при решении которых чувствуешь себя крутым), линейные интегралы и теорема Грина.
Дифференциальные уравнения — самая сложная математика?
Дифференциальные уравнения — самый сложный урок математики в типичной инженерной программе: (Calc I-III + DE). Вводный уровень также часто является однопеременным для ДУ, но в некоторых случаях дифференциальное уравнение моделируется как функция двух переменных – x и y……
Calc 1 или 2 сложнее?
Calc 2 проще, потому что в нем не так много новых концепций, как в calc 1.Я обнаружил, что вычисление 2 намного сложнее, чем вычисление 1, только потому, что для его запоминания требовалось НАСТОЛЬКО много времени. Концепции были просты, но попытка запомнить список общих первообразных производных была адом…
Вам нужен Calc 3 для дифференциальных уравнений?
Единственное, для чего вам действительно нужна концепция из calc 3, так это для методов решения точных уравнений. Для этого вам нужно только знать, как брать частные производные. Тем не менее, убедитесь, что вы хорошо разбираетесь в линейной алгебре, это гораздо важнее в Diff EQ.Неважно, какой из них вы возьмете первым.
Могу ли я сдавать Calc 3 и дифференциальные уравнения одновременно?
Дифференциальные уравнения могут попасть в некоторые области вычислений 3, в зависимости от учителя. Кроме того, если вы изучаете физику 2 одновременно с Calc 3 и Diff Eq, вы обнаружите много общего во всех трех курсах. Просто не принимайте ничего одновременно.
Какая математика после Исчисления 3?
Линейная алгебра
Дифференциальные уравнения Исчисление 4?
Описание Calc 4 из их каталога: «Дифференциальное исчисление вектор-функций, преобразование координат, замена переменных в кратных интегралах.Если они не предлагают calc 4 как ваш пост, скорее всего, этот курс называется дифференциальными уравнениями и линейной алгеброй.
Какое исчисление самое сложное?
Расчет 3
В чем разница между исчислением и дифференциальными уравнениями?
Исчисление — это определения и методы получения производных и интегралов от функции. Дифференциальные уравнения объединяют производные, саму функцию и/или производные высокого порядка, чтобы сделать гораздо более сложную задачу исчисления.Эта скорость изменения называется производной y по x.
Почему мы решаем дифференциальные уравнения?
Дифференциальное уравнение само по себе является прекрасным способом что-то выразить, но его трудно использовать. Поэтому мы пытаемся решить их, превращая дифференциальное уравнение в более простое уравнение без дифференциальных битов, чтобы мы могли выполнять вычисления, строить графики, предсказывать будущее и так далее.
Как дифференциальное исчисление используется в реальной жизни?
Биологи используют дифференциальное исчисление для определения точной скорости роста бактериальной культуры при изменении различных переменных, таких как температура и источник пищи….
Где мы используем дифференциальные уравнения в реальной жизни?
Приложения обыкновенных дифференциальных уравнений в реальной жизни используются для расчета движения или потока электричества, движения объекта туда и обратно, как маятник, для объяснения концепций термодинамики. Также, говоря медицинским языком, они используются для проверки роста заболеваний в графическом представлении.
Используют ли инженеры-строители дифференциальные уравнения?
Инженер-строитель использует почти все формы математики в определенный момент времени для выполнения своей работы.Алгебра используется ежедневно, и многим инженерам время от времени приходится иметь дело с дифференциальными уравнениями, статистикой и вычислениями.
Сколько типов дифференциальных уравнений существует?
Все дифференциальные уравнения можно разделить на два типа: обыкновенные дифференциальные уравнения и уравнения в частных производных. Уравнение в частных производных — это дифференциальное уравнение, в котором есть частные производные…
Как работают дифференциальные уравнения?
Дифференциальное уравнение показывает, как скорость изменения («дифференциал») одной переменной связана с другими переменными.Например, когда положение равно нулю (т. е. струна очень сильно растянута или сжата), скорость изменения скорости велика, потому что пружина оказывает большое усилие.
Каковы применения дифференциальных уравнений?
3.0: Некоторые приложения, ведущие к дифференциальному уравнению
- Рост и убыль населения.
- Закон охлаждения Ньютона.
- Усвоение глюкозы организмом.
- Распространение эпидемий.
- Второй закон Ньютона.
- Взаимодействующие виды: конкуренция.
PDE сложнее, чем Ode?
PDE, как правило, труднее понять решения, чем ODE. По сути, все большие теоремы об ОДУ неприменимы к УЧП. Это больше, чем просто основная причина того, что существует больше переменных.
Как доказать линейность дифференциального уравнения?
В дифференциальном уравнении, когда переменные и их производные умножаются только на константы, уравнение является линейным.Переменные и их производные всегда должны появляться в виде простой первой степени.
Как решать дифференциальные уравнения с интегрирующими коэффициентами?
Мы можем решить эти дифференциальные уравнения, используя технику интегрирующего множителя. Умножим обе части дифференциального уравнения на интегрирующий множитель I, который определяется как I = e∫ P dx. ⇔ Iy = ∫ IQ dx, так как d dx (Iy) = I dy dx + IPy по правилу произведения.
4.1 Основы дифференциальных уравнений. Расчет, том 2
Цели обучения
- 4.1.1 Определите порядок дифференциального уравнения.
- 4.1.2 Объясните, что понимается под решением дифференциального уравнения.
- 4.1.3 Различают общее решение и частное решение дифференциального уравнения.
- 4.1.4 Определите проблему начального значения.
- 4.1.5 Определите, является ли данная функция решением дифференциального уравнения или задачи с начальным значением.
Исчисление — это математика изменений, а скорости изменений выражаются производными.Таким образом, один из наиболее распространенных способов использования исчисления состоит в том, чтобы составить уравнение, содержащее неизвестную функцию y=f(x)y=f(x) и ее производную, известную как дифференциальное уравнение . Решение таких уравнений часто дает информацию о том, как изменяются величины, и часто дает представление о том, как и почему происходят изменения.
Методы решения дифференциальных уравнений могут принимать различные формы, включая прямое решение, использование графиков или компьютерные вычисления. Мы вводим основные идеи в этой главе и опишем их более подробно позже в ходе курса.В этом разделе мы изучаем, что такое дифференциальные уравнения, как проверять их решения, некоторые методы, которые используются для их решения, и некоторые примеры распространенных и полезных уравнений.
Общие дифференциальные уравнения
Рассмотрим уравнение y′=3×2,y′=3×2, которое является примером дифференциального уравнения, поскольку оно включает производную. Существует связь между переменными xx и y:yy:y — неизвестная функция x.x. Кроме того, левая часть уравнения является производной от y.у. Поэтому мы можем интерпретировать это уравнение следующим образом: начнем с некоторой функции y=f(x)y=f(x) и возьмем ее производную. Ответ должен быть равен 3×2,3×2. Какая функция имеет производную, равную 3×2?3×2? Одной из таких функций является y=x3,y=x3, поэтому эта функция считается решением дифференциального уравнения.
Определение
Дифференциальное уравнение – это уравнение, включающее неизвестную функцию y=f(x)y=f(x) и одну или несколько ее производных. Решением дифференциального уравнения является функция y=f(x)y=f(x), которая удовлетворяет дифференциальному уравнению, когда ff и его производные подставляются в уравнение.
Некоторые примеры дифференциальных уравнений и их решений приведены в таблице 4.1.
Уравнение Решение y’=2xy’=2x у=х2у=х2 у’+3у=6х+11у’+3у=6х+11 у=е-3х+2х+3у=е-3х+2х+3 y′′−3y′+2y=24e−2xy′′−3y′+2y=24e−2x y=3ex-4e2x+2e-2xy=3ex-4e2x+2e-2x Таблица 4.1 Примеры дифференциальных уравнений и их решений
Обратите внимание, что решение дифференциального уравнения не обязательно уникально, прежде всего потому, что производная константы равна нулю.Например, y=x2+4y=x2+4 также является решением первого дифференциального уравнения в таблице 4.1. Мы вернемся к этой идее немного позже в этом разделе. А пока давайте сосредоточимся на том, что означает, что функция является решением дифференциального уравнения.
Пример 4.1
Проверка решений дифференциальных уравнений
Убедитесь, что функция y=e−3x+2x+3y=e−3x+2x+3 является решением дифференциального уравнения y′+3y=6x+11.y′+3y=6x+11.
Решение
Чтобы проверить решение, мы сначала вычисляем y′y′, используя цепное правило для производных.Это дает y′=−3e−3x+2.y′=−3e−3x+2. Затем подставляем yy и y′y′ в левую часть дифференциального уравнения:
(-3e-3x+2)+3(e-3x+2x+3).(-3e-3x+2)+3(e-3x+2x+3).Полученное выражение можно упростить, сначала убрав круглые скобки, что даст
−3e−3x+2+3e−3x+6x+9.−3e−3x+2+3e−3x+6x+9.Объединение одинаковых членов приводит к выражению 6x+11,6x+11, равному правой части дифференциального уравнения. Этот результат подтверждает, что y=e−3x+2x+3y=e−3x+2x+3 является решением дифференциального уравнения.
Контрольно-пропускной пункт 4.1
Убедитесь, что y=2e3x−2x−2y=2e3x−2x−2 является решением дифференциального уравнения y′−3y=6x+4.y′−3y=6x+4.
Удобно определять характеристики дифференциальных уравнений, чтобы было легче говорить о них и классифицировать их. Наиболее основной характеристикой дифференциального уравнения является его порядок.
Определение
Порядок дифференциального уравнения — это наивысший порядок любой производной неизвестной функции, входящей в уравнение.
Пример 4.2
Определение порядка дифференциального уравнения
Каков порядок каждого из следующих дифференциальных уравнений?
- у’-4у=х2-3х+4у’-4у=х2-3х+4
- x2y‴−3xy″+xy′−3y=sinxx2y‴−3xy″+xy′−3y=sinx
- 4xy(4)−6x2y″+12x4y=x3−3×2+4x−124xy(4)−6x2y″+12x4y=x3−3×2+4x−12
Решение
- Старшая производная в уравнении равна y′,y′, поэтому порядок равен 1.1.
- Старшая производная в уравнении равна y‴,y‴, поэтому порядок равен 3,3.
- Наибольшая производная в уравнении равна y(4),y(4), поэтому порядок равен 4,4.
Контрольно-пропускной пункт 4.2
Каков порядок следующего дифференциального уравнения?
(x4−3x)y(5)−(3×2+1)y′+3y=sinxcosx(x4−3x)y(5)−(3×2+1)y′+3y=sinxcosxОбщие и частные решения
Мы уже отмечали, что дифференциальное уравнение y′=2xy′=2x имеет по крайней мере два решения: y=x2y=x2 и y=x2+4.у=х2+4. Единственная разница между этими двумя решениями заключается в последнем члене, который является константой. Что, если последний член является другой константой? Будет ли это выражение по-прежнему решением дифференциального уравнения? На самом деле любая функция вида y=x2+C,y=x2+C, где CC представляет любую константу, также является решением. Причина в том, что производная x2+Cx2+C равна 2x,2x, независимо от значения C.C. Можно показать, что любое решение этого дифференциального уравнения должно иметь вид y=x2+C.y=x2+C.Это пример общего решения дифференциального уравнения. График некоторых из этих решений приведен на рис. 4.2. ( Примечание : на этом графике мы использовали четные целые значения для CC в диапазоне от −4−4 до 4,4. Фактически, нет ограничений на значение C;C; оно может быть целым или нет.)
Фигура 4.2 Семейство решений дифференциального уравнения y′=2x.y′=2x.В этом примере мы можем выбрать любое желаемое решение; например, y=x2−3y=x2−3 является членом семейства решений этого дифференциального уравнения.Это называется частным решением дифференциального уравнения. Конкретное решение часто может быть однозначно идентифицировано, если нам предоставляется дополнительная информация о проблеме.
Пример 4.3
Поиск частного решения
Найдите частное решение дифференциального уравнения y′=2xy′=2x, проходящее через точку (2,7).(2,7).
Решение
Любая функция вида y=x2+Cy=x2+C является решением этого дифференциального уравнения.Чтобы определить значение C,C, мы подставляем значения x=2x=2 и y=7y=7 в это уравнение и решим для C:C:
y=x2+C7=22+C=4+CC=3.y=x2+C7=22+C=4+CC=3.Следовательно, частное решение, проходящее через точку (2,7)(2,7), равно y=x2+3.y=x2+3.
Контрольно-пропускной пункт 4.3
Найдите частное решение дифференциального уравнения
, проходящий через точку (1,7),(1,7), при условии, что y=2×2+3x+Cy=2×2+3x+C является общим решением дифференциального уравнения.
Проблемы с начальным значением
Обычно данное дифференциальное уравнение имеет бесконечное число решений, поэтому естественно спросить, какое из них мы хотим использовать. Чтобы выбрать одно решение, необходимо больше информации. Некоторая конкретная информация, которая может быть полезна, — это начальное значение, представляющее собой упорядоченную пару, которая используется для поиска определенного решения.
Дифференциальное уравнение вместе с одним или несколькими начальными значениями называется начальной задачей. Общее правило состоит в том, что количество начальных значений, необходимых для начальной задачи, равно порядку дифференциального уравнения.Например, если у нас есть дифференциальное уравнение y′=2x,y′=2x, то y(3)=7y(3)=7 является начальным значением, и вместе эти уравнения образуют начальную задачу. Дифференциальное уравнение y″−3y′+2y=4exy″−3y′+2y=4ex имеет второй порядок, поэтому нам нужны два начальных значения. В задачах с начальным значением порядка больше единицы для независимой переменной следует использовать одно и то же значение. Примером начальных значений для этого уравнения второго порядка могут быть y(0)=2y(0)=2 и y′(0)=−1.y′(0)=−1. Эти два начальных значения вместе с дифференциальным уравнением образуют начальную задачу.Эти проблемы названы так потому, что часто независимой переменной в неизвестной функции является t, t, которая представляет время. Таким образом, значение t=0t=0 представляет собой начало проблемы.
Пример 4.4
Проверка решения задачи с начальным значением
Проверить, что функция y=2e−2t+ety=2e−2t+et является решением задачи с начальным значением
y′+2y=3et,y(0)=3.y′+2y=3et,y(0)=3.Решение
Чтобы функция удовлетворяла начальной задаче, она должна удовлетворять как дифференциальному уравнению, так и начальному условию.Чтобы показать, что yy удовлетворяет дифференциальному уравнению, мы начнем с вычисления y′.y′. Это дает y′=−4e−2t+et.y′=−4e−2t+et. Затем мы подставляем как yy, так и y′y′ в левую часть дифференциального уравнения и упрощаем:
y′+2y=(−4e−2t+et)+2(2e−2t+et)=−4e−2t+et+4e−2t+2et=3et.y′+2y=(−4e−2t+et )+2(2e-2t+et)=-4e-2t+et+4e-2t+2et=3et.Это равно правой части дифференциального уравнения, поэтому y=2e−2t+ety=2e−2t+et решает дифференциальное уравнение. Далее мы вычисляем y(0):y(0):
у(0)=2е-2(0)+е0=2+1=3.у(0)=2е-2(0)+е0=2+1=3.Этот результат подтверждает начальное значение. Следовательно, данная функция удовлетворяет начальной задаче.
Контрольно-пропускной пункт 4.4
Убедитесь, что y=3e2t+4sinty=3e2t+4sint является решением задачи с начальным значением
y′−2y=4cost−8sint,y(0)=3.y′−2y=4cost−8sint,y(0)=3.В примере 4.4 начальная задача состояла из двух частей. Первая часть представляла собой дифференциальное уравнение y′+2y=3ex,y′+2y=3ex, а вторая часть представляла собой начальное значение y(0)=3.у(0)=3. Эти два уравнения вместе образуют начальную задачу.
То же самое в целом. Начальная задача будет состоять из двух частей: дифференциального уравнения и начального условия. Дифференциальное уравнение имеет семейство решений, а начальное условие определяет значение C.C. Семейство решений дифференциального уравнения в примере 4.4 задается формулой y=2e−2t+Cet.y=2e−2t+Cet. Это семейство решений показано на рис. 4.3, где конкретное решение y=2e−2t+ety=2e−2t+et помечено.
Фигура 4.3 Семейство решений дифференциального уравнения y′+2y=3et.y′+2y=3et. Частное решение y=2e−2t+ety=2e−2t+et помечено.Пример 4,5
Решение задачи с начальным значением
Решите следующую задачу с начальными значениями:
y′=3ex+x2−4,y(0)=5.y′=3ex+x2−4,y(0)=5.Решение
Первым шагом в решении этой задачи с начальными значениями является поиск общего семейства решений. Для этого найдем первообразную обеих частей дифференциального уравнения
∫y′dx=∫(3ex+x2−4)dx,∫y′dx=∫(3ex+x2−4)dx,а именно
у+С1=3ех+13х3-4х+С2.у+С1=3ех+13х3-4х+С2.(4.1)
Мы можем интегрировать обе стороны, потому что термин y появляется сам по себе. Обратите внимание на две константы интегрирования: C1C1 и C2.C2. Решение уравнения 4.1 для yy дает
y=3ex+13×3−4x+C2−C1.y=3ex+13×3−4x+C2−C1.Поскольку C1C1 и C2C2 являются константами, C2-C1C2-C1 также является константой. Таким образом, мы можем определить C=C2−C1,C=C2−C1, что приводит к уравнению
y=3ex+13×3−4x+C.y=3ex+13×3−4x+C.Далее мы определяем значение C.C. Для этого подставим x=0x=0 и y=5y=5 в уравнение 4.1 и решим для C:C:
. 5=3e0+1303−4(0)+C5=3+CC=2,5=3e0+1303−4(0)+C5=3+CC=2.Теперь подставим значение C=2C=2 в уравнение 4.1. Решение начальной задачи: y=3ex+13×3−4x+2.y=3ex+13×3−4x+2.
Анализ
Разница между общим решением и частным решением состоит в том, что общее решение включает в себя набор функций независимой переменной, определенных явно или неявно.Начальное значение или значения определяют, какое конкретное решение в семействе решений удовлетворяет желаемым условиям.
Контрольно-пропускной пункт 4,5
Решить задачу с начальным значением
y′=x2−4x+3−6ex,y(0)=8.y′=x2−4x+3−6ex,y(0)=8.В физике и инженерных приложениях мы часто рассматриваем силы, действующие на объект, и используем эту информацию для понимания результирующего движения, которое может произойти. Например, если мы начнем с объекта на поверхности Земли, основной силой, действующей на этот объект, будет гравитация.Физики и инженеры могут использовать эту информацию вместе со вторым законом движения Ньютона (в форме уравнения F=ma, F=ma, где FF представляет силу, mm представляет массу, а aa представляет собой ускорение), чтобы вывести уравнение, которое можно решить. .
Фигура 4.4 Для бейсбольного мяча, падающего в воздухе, на него действует только сила тяжести (без учета сопротивления воздуха).
На рис. 4.4 мы предполагаем, что единственная сила, действующая на бейсбольный мяч, — это сила тяжести. Это предположение игнорирует сопротивление воздуха.(Сила, вызванная сопротивлением воздуха, будет рассмотрена позже.) Ускорение силы тяжести на поверхности Земли, g, g, составляет приблизительно 9,8 м/с2,9,8 м/с2. Введем систему отсчета, где поверхность Земли находится на высоте 0 метров. Пусть v(t)v(t) представляет собой скорость объекта в метрах в секунду. Если v(t)>0,v(t)>0, мяч поднимается, а если v(t)<0,v(t)<0, мяч падает (рис. 4.5).
Фигура 4,5 Возможные скорости подъема/падения бейсбольного мяча.
Наша цель — определить скорость v(t)v(t) в любой момент времени t.t. Для этого поставим задачу с начальным значением. Предположим, что масса мяча равна m,m, где mm измеряется в килограммах. Мы используем второй закон Ньютона, который гласит, что сила, действующая на объект, равна его массе, умноженной на его ускорение (F=ma).(F=ma). Ускорение является производной скорости, поэтому a(t)=v′(t).a(t)=v′(t). Следовательно, сила, действующая на бейсбольный мяч, определяется выражением F=mv′(t).F=mv′(t). Однако эта сила должна быть равна силе тяжести, действующей на объект, которая (опять же с использованием второго закона Ньютона) определяется формулой Fg=-mg, Fg=-mg, поскольку эта сила действует в направлении вниз.Поэтому мы получаем уравнение F=Fg,F=Fg, которое становится mv′(t)=−mg.mv′(t)=−mg. Разделив обе части уравнения на мм, мы получим уравнение
. v'(t)=-g.v'(t)=-g.Обратите внимание, что это дифференциальное уравнение остается неизменным независимо от массы объекта.
Теперь нам нужно начальное значение. Поскольку мы ищем скорость, в контексте задачи имеет смысл предположить, что мы знаем начальную скорость или скорость в момент времени t=0.t=0. Это обозначается как v(0)=v0.v(0)=v0.
Пример 4.6
Скорость движущегося бейсбольного мяча
Бейсбольный мяч брошен вверх с высоты 33 метра над поверхностью Земли с начальной скоростью 10 м/с, 10 м/с, и единственная сила, действующая на него, — сила тяжести. Мяч имеет массу 0,15 кг 0,15 кг на поверхности Земли.
- Найдите скорость v(t)v(t) бейсбольного мяча в момент времени t.t.
- Какова его скорость через 22 секунды?
Решение
- Исходя из предыдущего обсуждения, дифференциальное уравнение, применимое в этой ситуации, имеет вид
. v'(t)=-g,v'(t)=-g,
где г=9.8 м/с2.g=9,8 м/с2. Начальное условие: v(0)=v0,v(0)=v0, где v0=10м/с, v0=10м/с. Следовательно, начальная задача имеет вид v′(t)=−9,8 м/с2, v(0)=10 м/с. v′(t)=−9,8 м/с2, v(0)=10 м/с.
Первым шагом в решении этой задачи с начальными значениями является получение первообразной обеих частей дифференциального уравнения. Это дает
∫v′(t)dt=∫−9,8dtv(t)=−9,8t+C.∫v′(t)dt=∫−9,8dtv(t)=−9,8t+C.
Следующим шагом является решение для C.C. Для этого подставьте t=0t=0 и v(0)=10:v(0)=10:
v(t)=-9,8t+Cv(0)=-9.8(0)+C10=C.v(t)=-9,8t+Cv(0)=-9,8(0)+C10=C.
Следовательно, C=10C=10, а функция скорости определяется выражением v(t)=-9,8t+10,v(t)=-9,8t+10. - Чтобы найти скорость через 22 секунды, подставьте t=2t=2 в v(t).v(t).
v(t)=-9,8t+10v(2)=-9,8(2)+10v(2)=-9,6.v(t)=-9,8t+10v(2)=-9,8(2)+10v( 2)=-9,6.
Единицы скорости – метры в секунду. Поскольку ответ отрицательный, объект падает со скоростью 9,6 м/с. 9,6 м/с.
Контрольно-пропускной пункт 4.6
Предположим, что камень падает из состояния покоя с высоты 100100 метров, и единственная сила, действующая на него, — сила тяжести.Найдите уравнение для скорости v(t)v(t) как функции времени, измеряемой в метрах в секунду.
Естественный вопрос, который возникает после решения задачи такого типа, заключается в том, на какой высоте объект будет находиться над поверхностью Земли в данный момент времени. Пусть s(t)s(t) обозначает высоту объекта над поверхностью Земли, измеряемую в метрах. Поскольку скорость является производной положения (в данном случае высоты), это предположение дает уравнение s′(t)=v(t).s′(t)=v(t). Необходимо начальное значение; в этом случае хорошо работает начальная высота объекта.Пусть начальная высота задана уравнением s(0)=s0.s(0)=s0. Вместе эти предположения дают начальную задачу
s′(t)=v(t),s(0)=s0.s′(t)=v(t),s(0)=s0.Если известна функция скорости, то можно найти и функцию положения.
Пример 4.7
Высота движущегося бейсбольного мяча
Бейсбольный мяч брошен вверх с высоты 33 метра над поверхностью Земли с начальной скоростью 10 м/с, 10 м/с, и единственная сила, действующая на него, — сила тяжести.Мяч имеет массу 0,150,15 кг на поверхности Земли.
- Найдите положение s(t)s(t) бейсбольного мяча в момент времени t.t.
- Какова его высота через 22 секунды?
Решение
- Мы уже знаем, что функция скорости для этой задачи равна v(t)=−9,8t+10,v(t)=−9,8t+10. Начальная высота бейсбольного мяча 33 метра, поэтому s0=3.s0=3. Следовательно, задача с начальным значением для этого примера равна
. Чтобы решить начальную задачу, мы сначала находим первообразные:
∫s′(t)dt=∫−9.8t+10dts(t)=-4,9t2+10t+C.∫s'(t)dt=∫-9,8t+10dts(t)=-4,9t2+10t+C.
Затем мы подставляем t=0t=0 и находим C:C:
. s(t)=-4,9t2+10t+Cs(0)=-4,9(0)2+10(0)+C3=Cs(t)=-4,9t2+10t+Cs(0)=-4,9(0) )2+10(0)+С3=С.
Следовательно, функция положения равна s(t)=−4,9t2+10t+3.s(t)=−4,9t2+10t+3. - Высота бейсбольного мяча после 2s2s определяется выражением s(2):s(2):
s(2)=-4,9(2)2+10(2)+3=-4,9(4)+23=3,4.s(2)=-4,9(2)2+10(2)+3=-4,9 (4)+23=3,4.
Следовательно, бейсбольный мяч находится на высоте 3,43,4 метра над поверхностью Земли через 22 секунды.Стоит отметить, что в процессе решения задачи масса шара полностью нейтрализовалась.
Раздел 4.1 Упражнения
Определите порядок следующих дифференциальных уравнений.
2 .(у’)2=у’+2у(у’)2=у’+2у
3 .y‴+y″y′=3x2y‴+y″y′=3×2
4 .y′=y″+3t2y′=y″+3t2
6 .dyx+d2ydx2=3x4dydx+d2ydx2=3×4
7 .(dydt)2+8dydt+3y=4t(dydt)2+8dydt+3y=4t
Убедитесь, что следующие функции являются решениями данного дифференциального уравнения.
8 .y=x33y=x33 решает y′=x2y′=x2
9 .y=2e−x+x−1y=2e−x+x−1 решает y′=x−yy′=x−y
10 .y=e3x−ex2y=e3x−ex2 решает y′=3y+exy′=3y+ex
11 .y=11−xy=11−x решает y′=y2y′=y2
12 .y=ex2/2y=ex2/2 решает y′=xyy′=xy
13 .y=4+lnxy=4+lnx решает xy′=1xy′=1
14 .y=3−x+xlnxy=3−x+xlnx решает y′=lnxy′=lnx
15 .y=2ex−x−1y=2ex−x−1 решает y′=y+xy′=y+x
16 .y=ex+sinx2−cosx2y=ex+sinx2−cosx2 решает y′=cosx+yy′=cosx+y
17 .y=πe-cosxy=πe-cosx решает y′=ysinxy′=ysinx
Проверьте следующие общие решения и найдите конкретное решение.
18 .Найдите частное решение дифференциального уравнения y′=4x2y′=4×2, которое проходит через (−3,−30),(−3,−30), учитывая, что y=C+4x33y=C+4×33 является общим решением .
19 .Найдите частное решение дифференциального уравнения y′=3x3y′=3×3, которое проходит через (1,4.75),(1,4.75), при условии, что y=C+3x44y=C+3×44 является общим решением.
20 .Найдите частное решение дифференциального уравнения y′=3x2yy′=3x2y, которое проходит через (0,12),(0,12), при условии, что y=Cex3y=Cex3 является общим решением.
21 .Найдите частное решение дифференциального уравнения y′=2xyy′=2xy, которое проходит через (0,12),(0,12), при условии, что y=Cex2y=Cex2 является общим решением.
22 .Найдите частное решение дифференциального уравнения y′=(2xy)2y′=(2xy)2, которое проходит через (1,−12),(1,−12), учитывая, что y=−3C+4x3y=−3C +4×3 – это общее решение.
23 .Найдите частное решение дифференциального уравнения y′x2=yy′x2=y, которое проходит через (1,2e),(1,2e), при условии, что y=Ce−1/xy=Ce−1/x является общее решение.
24 .Найдите частное решение дифференциального уравнения 8dxdt=−2cos(2t)−cos(4t)8dxdt=−2cos(2t)−cos(4t), которое проходит через (π,π),(π,π), учитывая, что x=C−18sin(2t)−132sin(4t)x=C−18sin(2t)−132sin(4t) является общим решением.
25 .Найдите частное решение дифференциального уравнения dudt=tanududt=tanu, которое проходит через (1,π2),(1,π2), при условии, что u=sin−1(eC+t)u=sin−1(eC+t ) является общим решением.
26 .Найдите частное решение дифференциального уравнения dydt=e(t+y)dydt=e(t+y), которое проходит через (1,0),(1,0), при условии, что y=−ln(C−et )y=−ln(C−et) является общим решением.
27 .Найдите частное решение дифференциального уравнения y′(1−x2)=1+yy′(1−x2)=1+y, которое проходит через (0,−2),(0,−2), при условии, что y =Cx+11−x−1y=Cx+11−x−1 является общим решением.
Для следующих задач найдите общее решение дифференциального уравнения.
29 .y′=lnx+tanxy′=lnx+tanx
30 .y’=sinxecosxy’=sinxecosx
32 .у’=sin-1(2x)y’=sin-1(2x)
34 .x’=кот+lnt+3t2x’=кот+lnt+3t2
Решите следующие начальные задачи, начиная с y(0)=1y(0)=1 и y(0)=−1.y(0)=−1. Нарисуйте оба решения на одном графике.
Решите следующие задачи с начальными значениями, начиная с y0=10.y0=10. В какой момент yy увеличивается до 100 100 или падает до 1–1?
Напомним, что семейство решений включает в себя решения дифференциального уравнения, отличающиеся на константу.Для следующих задач используйте свой калькулятор, чтобы построить график семейства решений данного дифференциального уравнения. Используйте начальные условия от y(t=0)=-10y(t=0)=-10 до y(t=0)=10y(t=0)=10, увеличивая на 2,2. Есть ли критическая точка, в которой поведение решения начинает меняться?
51 .[T] y’=x+yy’=x+y ( Подсказка: y=Cex-x-1y=Cex-x-1 является общим решением)
52 .[T] y′=xlnx+sinxy′=xlnx+sinx
53 .Найдите общее решение, описывающее скорость мяча массой 1 фунт 1 фунт, брошенного вверх со скоростью aa фут/сек.
54 .В предыдущей задаче, если начальная скорость мяча, брошенного в воздух, равна a=25a=25 футов/с, запишите частное решение скорости мяча. Решите, чтобы найти время, когда мяч коснется земли.
55 .Вы подбрасываете вверх в воздух два объекта с разными массами m1m1 и m2m2 с одинаковой начальной скоростью aa фут/с. Как изменится их скорость через 11 секунд?
56 .[T] Вы бросаете мяч массой 11 кг со скоростью a=25a=25 м/с на Марс, где сила тяжести g=−3.711g=-3,711 м/с 2 . С помощью калькулятора вычислите, насколько дольше мяч находится в воздухе на Марсе, чем на Земле, где g=-9,8 м/с2g=-9,8 м/с2.
57 .[T] В предыдущей задаче с помощью калькулятора вычислите, насколько выше поднялся мяч на Марсе, где g=-9,8 м/с2g=-9,8 м/с2.
58 .[T] Автомобиль на автостраде ускоряется по закону a=15cos(πt),a=15cos(πt), где tt измеряется в часах. Составьте и решите дифференциальное уравнение, чтобы определить скорость автомобиля, если его начальная скорость равна 5151 миля в час.Какова скорость водителя после 4040 минут вождения?
59 .[T] Для автомобиля из предыдущей задачи найдите выражение для расстояния, пройденного автомобилем за время t,t, при условии, что начальное расстояние равно 0,0. За какое время автомобиль проедет 100100 км? Округлите ответ до часов и минут.
60 .[T] В предыдущей задаче найдите общее расстояние, пройденное за первый час.
61 .Подставьте y=Be3ty=Be3t в y′−y=8e3ty′−y=8e3t, чтобы найти конкретное решение.
62 .Подставьте y=acos(2t)+bsin(2t)y=acos(2t)+bsin(2t) в y′+y=4sin(2t)y′+y=4sin(2t), чтобы найти конкретное решение.
63 .