
Теория механизмов и машин (ТММ)
Теория механизмов и машин (сокр. — ТММ) — наука, изучающая строение, кинематику и динамику машин и механизмов для их анализа, синтеза и проектирования.
- Лекции
- Примеры решения задач
- Порядок решения задач
- Заказать курсовую по ТММ
- Курсовое проектирование
- Учебная литература
- Экзаменационные вопросы
- Помощь на экзаменах и защитах
Сохранить и поделиться с друзьями
Курс теории механизмов и машин (ТММ) как раздел технической механики, является переходной ступенью в цепи механической подготовки инженера – он опирается на фундаментальные знания, полученные студентом при изучении математики, физики, теоретической механики и является базой для изучения последующих практических (специальных) дисциплин механического цикла (прежде всего для курса «Детали машин и основы конструирования»).
Другие видео
Целью изучения дисциплин является формирование необходимой начальной базы знаний по общим методам анализа и синтеза механических систем, положенных в основу технологического оборудования, применяемого в сфере будущей профессиональной деятельности выпускника.
Сочетание в теории механизмов и машин теоретических основ с практическими методами решения задач, возникающих при создании и использовании механического оборудования, формирует определенные знания по видам деятельности выпускника: проектно-конструкторской, производственно-технологической, научно-исследовательской, организационно-управленческой.
Дисциплина «Теория механизмов и машин» направлена на подготовку будущего специалиста к решению следующих профессиональных задач и квалификационных требований, определенных Государственным образовательным стандартом направления:
- Проектирование механизмов машин, оборудования; структурообразование механизмов машин, методы их синтеза, расчета кинематических и динамических характеристик;
- Осуществление рациональной эксплуатации машин и оборудования;
- Установление причин неисправности в работе технологического оборудования, принятие мер по их устранению;
- Знание принципов работы, технических характеристик, конструктивных особенностей разрабатываемых и используемых технических средств;
- Выполнение опытно-конструкторских разработок;
- Знание стандартов, технических условий и других руководящих документов по разработке и оформлению технической документации.


Для выполнения указанных выше требований в соответствии с Государственным образовательным стандартом направления студент должен знать:
- основные понятия теории механизмов и машин;
- основные виды механизмов;
- структурный анализ и синтез механизмов;
- кинематический анализ и синтез механизмов;
- кинетостатический анализ механизмов;
- динамический анализ и синтез механизмов;
- динамику приводов; электро-, гидро-, пневмопривод механизмов; выбор типа привода;
- синтез рычажных, передаточных, направляющих механизмов с применением компьютерной техники.
В результате отработки практических занятий и выполнения расчетно-графических работ студент должен уметь:
- определять число степеней свободы (подвижности) механизмов;
- производить структурный анализ и синтез механизмов;
- производить кинематический анализ механизмов;
- производить силовой анализ механизмов;
- учитывать потери на трение при работе механизма и знать пути их снижения;
- производить синтез рычажных, зубчатых, кулачковых механизмов с учетом передачи сил при обеспечении работоспособности конструкции.

Студент должен также закрепить опыт оформления текстовой и графической части проектно-конструкторской документации, полученный при изучении предшествующих курсов, в соответствии с ГОСТами ЕСКД.
- Курс лекций по ТММ
- Порядок решения задач и выполнения курсового проекта
- Решение задач по теории механизмов и машин
- Задания
- Литература
См. также:
- Теоретическая механика
- Сопротивление материалов
- Детали машин
Сохранить или поделиться с друзьями
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Подробнее
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
На нашем сайте можно бесплатно скачать:
– Рамки A4 для учебных работ
– Шрифты чертежные ГОСТ
– Листы в клетку и в линейку
Сохранить или поделиться с друзьями
Помощь с решением
ВЫБЕРИТЕ РАЗДЕЛ МЕХАНИКИ
- Техническая механика (техмех)
- Теоретическая механика (теормех)
- Сопротивление материалов (сопромат)
- Строительная механика (строймех)
- Теория механизмов и машин (ТММ)
- Детали машин и ОК (ДМ)
Теория механизмов и машин. Основные задачи ТММ
Похожие презентации:
Основные понятия теории механизмов и машин
Курс «Теория механизмов и машин»
Основные понятия и определения. Структурный анализ механизмов
Теория машин и механизмов
Введение. Основные термины, понятия и определения теории механизмов и машин
Детали Машин. Виды механизмов
Виды механизмов
Основные понятия теории механизмов и машин
Основные понятия теории механизмов и машин
Теория механизмов и машин. Курс лекции
Введение в теорию машин и механизмов
1. ЛЕКЦИЯ 1
Краткое содержание:Цель и задачи курса ТММ.
Основные понятия и определения курса ТММ.
Машина. Классификация машин.
Механизм. Классификация механизмов.
Элементы механизма. Звено. Кинематическая
пара. Кинематическая цепь.
Теория механизмов и машин – это
наука,
изучающая
структуру,
кинематику и динамику механизмов и
машин в связи с их анализом и
синтезом.
3. Основные задачи ТММ
Изучение строения (структуры) механизмаОпределение положений механизмов и траекторий,
описываемых отдельными точками
Определение скоростей и ускорений отдельных
точек и звеньев механизма
Исследование
и
проектирование
различных
механизмов (рычажных, зубчатых, кулачковых и др.)
Определение различных сил, действующих на звенья
механизма (внешних, реакций, трения, инерции)
Изучение энергетического баланса машин (к.
 п.д. и
п.д. идр.)
Изучение истинного закона движения машин под
действием заданных сил. изучение способов
регулирования скорости машины
Изучение способов уравновешивания сил инерции в
машинах и др.
4. Основные разделы курса ТММ
структура механизмов и машингеометрия механизмов и их элементов
кинематика механизмов
динамика машин и механизмов
5. Основные понятия и определения курса ТММ
Машина – устройство, создаваемое человекомдля преобразования энергии, материалов и
информации с целью облегчения физического и
умственного
труда,
увеличения
его
производительности и частичной или полной
замены
человека
в
его
трудовых
и
физиологических функциях.
6. Классификация машин
1.Энергетические машины – преобразуютэнергию одного вида в энергию другого вида.
7. Энергетические машины
Двигатели преобразуют любой вид энергиив механическую
Например, электродвигатели преобразуют электрическую энергию,
двигатели внутреннего сгорания преобразуют энергию расширения
газов при сгорании в цилиндре
Генераторы
преобразуют механическую
энергию в энергию другого вида
Например, электрогенератор преобразует механическую энергию
паровой или гидравлической турбины в электрическую
8.
 Классификация машин2. Рабочие машины – машины использующие
Классификация машин2. Рабочие машины – машины использующиемеханическую энергию для совершения работы
по
перемещению
и
преобразованию
материалов.
Рабочие машины
Транспортные машины – используют
механическую энергию для изменения
положения объекта (его координат).
Технологические машины – используют
механическую энергию для преобразования
формы, свойств, размеров и состояния
объекта.
10. Классификация машин
2. Информационные машины – машиныпредназначенные
для
обработки
и
преобразования информации. .
Информационные машины
Математические машины – преобразуют
входную информацию в математическую
модель исследуемого объекта.
Контрольно-управляющие
машины
преобразуют
входную
информацию
(программу) в сигналы управления рабочей
или энергетической машиной.
12. Классификация машин
4. Кибернетические машины – машиныуправляющие рабочими или энергетическими
машинами, которые способны изменять
программу своих действий в зависимости от
состояния окружающей среды (т.
 е. машины
е. машиныобладающие
элементами
искусственного
интеллекта).
Кибернетические машины
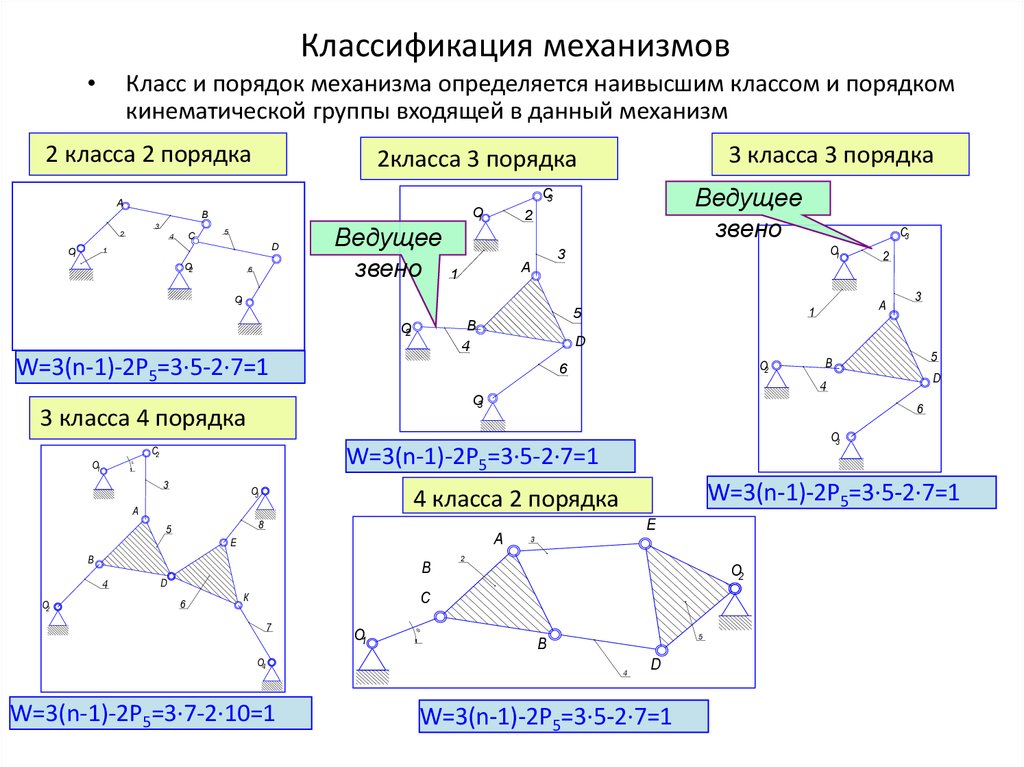
14. Классификация механизмов
Механизм – система тел, предназначеннаядля преобразования движения одного или
нескольких твердых тел в требуемые
движения других тел.
15. Классификация механизмов по конструктивным признакам
1. Рычажные механизмы16. Рычажные механизмы
17. Рычажные механизмы
18. Рычажные механизмы
19. Рычажные механизмы
20. Классификация механизмов по конструктивным признакам
2. Кулачковые механизмы21. Кулачковые механизмы
22. Кулачковые механизмы
23. Классификация механизмов по конструктивным признакам
3. Зубчатые механизмы24. Классификация механизмов по конструктивным признакам
4. Фрикционные механизмы25. Классификация механизмов по конструктивным признакам
5. Гидравлическиемеханизмы
и
пневматические
26. Классификация механизмов по конструктивным признакам
6. Механизмы с гибкими звеньями
Механизмы с гибкими звеньямиЦепная передача
Ременная передача
27. Классификация механизмов по движению и расположению звеньев в пространстве
ПлоскиеУ плоского механизма точки его звеньев описывают
траектории, лежащие в параллельных плоскостях.
Пространственные
У пространственного механизма точки его звеньев
описывают неплоские траектории или траектории,
лежащие в пересекающихся плоскостях.
28. Машинный агрегат – совокупность взаимосвязанных механизмов
Основные понятия и определениякурса ТММ
Машинный агрегат – совокупность
взаимосвязанных механизмов
Машинный агрегат
Кулачковый механизм
Ременная
передача
Рычажный
механизм
Цепная
передача
Планетарный
механизм
Зубчатый
механизм
Структура механизмов и машин
Звено – это одна или несколько деталей
механизма,
соединенных
между
собой
жестко.
Классификация звеньев
1.Неподвижное звено – стойка.
2.Подвижные звенья.
3.Ведущие звенья – это звенья, закон движения
которых задан.
4.Ведомые звенья – это звенья, закон движения
которых определяется движением ведущих звеньев.
В рычажных механизмах имеются следующие
подвижные звенья:
• кривошип совершает полный оборот относительно
стойки;
• коромысло
совершает
неполный
оборот
относительно стойки;
• ползун
совершает
возвратно-поступательное
движение;
• кулиса звено, которое совершает вращательное
движение относительно стойки и на котором есть
направляющая для ползуна;
• шатун звено, которое не имеет соединения со
стойкой.
Механизм строгального станка
Механизм строгального станка
5
4
6
1
2
6
3
6
1 – Кривошип
2 – Ползун
3 – Кулиса
4 – Шатун
5 – Ползун
6 – Стойка
Механизм пресса
Механизм пресса
6
3
1
4
5
2
6
6
1 – Кривошип
2 – Шатун
3 – Коромысло
4 – Шатун
5 – Ползун
6 – Стойка
Элементы механизма
Кинематическая пара – это соединение двух
звеньев,
обеспечивающее
перемещение
одного звена относительно другого.

6-максимальное число степеней свободы твердого тела в
пространстве
(3 поступательных и 3 вращательных движения относительно
осей координат XYZ)
Классификация кинематических пар
По числу степеней подвижности Н
Возможные независимые движения одного звена
относительно
другого
называются
степенями
подвижности кинематической пары H.
Ограничения, накладываемые на
движения
звеньев,
называются
кинематических парах S.
H=6-S
относительные
связями
в
(1.1)
Пятиподвижные кинематические пары
Шар – плоскость (ВВВПП)
H=5
S=1
Четырёхподвижные кинематические пары
Цилиндр – плоскость (ВВПП)
H=4
S=2
Трёхподвижные кинематические пары
Сферическая (ВВВ)
H=3
S=3
Трёхподвижные кинематические пары
Плоскостная (ВПП)
H=3
S=3
Двухподвижные кинематические пары
Сферическая с пальцем (ВВ)
H=2
S=4
Двухподвижные кинематические пары
Цилиндрическая (ВП)
H=2
S=4
Одноподвижные кинематические пары
Поступательная (П)
H=1
S=5
Одноподвижные кинематические пары
Вращательная (В)
H=1
S=5
Классификация кинематических пар
По характеру соприкосновения звеньев
Низшими кинематическими парами называются
такие, в которых соприкосновение звеньев
происходит по поверхности.

Цилиндрическая (ВП)
Плоскостная (ВПП)
Поступательная (П)
Классификация кинематических пар
По характеру соприкосновения звеньев
Высшими называются такие кинематические
пары, у которых соприкосновение звеньев
происходит по линии или точке.
Шар – плоскость (ВВВПП)
Цилиндр – плоскость (ВВПП)
Кулачок – толкатель
Элементы механизма
Кинематическая цепь – это система звеньев,
соединённых с помощью кинематических
пар.
50. Классификация кинематических цепей
• Незамкнутые – это кинематические цепи, которыеимеют
звенья,
входящие
только
в
одну
кинематическую пару.
• Замкнутые – это кинематические цепи, в которых
каждое звено входит не менее, чем в две
кинематические пары.
• Простые – это кинематические цепи, в которых
каждое звено входит не более, чем в две
кинематические пары.
• Сложные – это кинематические цепи, в которых
имеется хотя бы одно звено, входящее более чем в
две кинематические пары.

51. Примеры кинематических цепей
Сложная незамкнутая кинематическая цепьСложная замкнутая кинематическая цепь
52. Примеры кинематических цепей
Простая незамкнутая кинематическая цепьПростая замкнутая кинематическая цепь
53. Лекция окончена
Спасибо за внимание!English Русский Правила
Теория машин и механизмов – Джон Дж. Уикер-младший; Гордон Р. Пеннок; Джозеф Э. Шигли
Вы здесь: >Домашняя страница >Инжиниринг >Курсы машиностроения >Машины, вибрации, системная динамика и курсы дизайна >
Пятое издание
Джон Дж. Уикер-младший, Гордон Р. Пеннок и Джозеф Э. Шигли
Дата публикации — декабрь 2016 г.
ISBN: 97801
482
976 страниц
Твердый переплет
7-1/2 x 9-1/4 дюйма
В наличии
Розничная цена для студентов: $244,99
Классический текст по теории механизмов и кинематике
- Описание
- Новое в этом выпуске
- Информация о книге ▼
- Содержание
Описание
Теория машин и механизмов, , пятое издание, является идеальным текстом для полного изучения перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильного проектирования механических связей, кулачков и зубчатых систем.
* Обеспечивает сбалансированное освещение всех тем с помощью графических и аналитические методы
* Охватывает все основные аналитические подходы
* Предоставляет высокоточные графические решения для упражнений с использованием программного обеспечения САПР
* Включает метод кинематических коэффициентов, а также объединяет охват рычагов, кулачков и зубчатых передач
* Центр вспомогательных ресурсов (ARC) предлагает Руководство по решениям для инструктора, решения 100 задач из текста с использованием MatLab и слайды лекций в PowerPoint
* Сопутствующий веб-сайт содержит более 100 анимаций ключевых фигур из текста
Новое в этом издании
- Покрытие оптимизировано и объединено
- Задачи в конце главы были сильно переработаны
- Особенности
- Об авторе(ах)
- Предыдущая дата публикации
- отзывов
Особенности
- Предлагает сбалансированное освещение всех тем как графическими, так и аналитическими методами
- Охватывает все основные аналитические подходы
- Предоставляет высокоточные графические решения для упражнений с использованием программного обеспечения САПР
Об авторе(ах)
Джон Дж. Уикер-младший является почетным профессором машиностроения Университета Висконсин-Мэдисон.
Уикер-младший является почетным профессором машиностроения Университета Висконсин-Мэдисон.
Гордон Р. Пеннок — адъюнкт-профессор машиностроения Университета Пердью.
Покойный Джозеф Э. Шигли был почетным профессором инженерии Мичиганского университета.
Предыдущие даты публикации
Февраль 2010 г.
Январь 2003 г.
Обзоры
” Теория машин и механизмов, Пятое издание, обеспечивает надежное и строгое изложение теории анализа в доступной для студентов форме. .” — Пьер Ларошель, Технологический институт Флориды
“Самое большое преимущество текста заключается в том, насколько он удобочитаем. Сложные понятия очень хорошо излагаются в сжатой форме.” — Джон Лайер, 9 лет.0037 Университет Эвансвилля
СОДЕРЖАНИЕ
- ПРЕДИСЛОВИЕ
О авторах
Часть 1. Кинематика и механизмы
1. Мир механизмов
1.1 Введение
1.

1,3 Наука. Определения и предположения
1.5 Плоские, сферические и пространственные механизмы
1.6 Подвижность
1.7 Характеристики механизмов
1.8 Кинематическая инверсия
1.9Закон Грасгофа
1.10 Механическое преимущество
1.11 Ссылки
1.12 Проблемы
2. Положение, поза и смещение
2.1 Геометрическое положение движущейся точки
2.2 Положение точки
2.3 Положение точки 9013 Разница между двумя точками 2.3 Положение точки 901.
2.5 Абсолютное положение точки
2.6 Положение твердого тела
2.7 Уравнения замыкания петли
2.8 Графический анализ положения
2.9 Алгебраический анализ положения
2.10 Комплексно-алгебраические решения плоских векторных уравнений
2.11 Комплексная полярная алгебра
2.12 Методы анализа осанки
2,13 Генерация сцепления муфт
2.14 Смещение точки перемещения
2.15 Разница смещения между двумя точками
2,16 Трансляция и вращение
2.
 17 Определенное смещение
17 Определенное смещение 2.18 Абсолютное смещение
2.17 ОТДЕЛЕНИЕ. Литература
2.21 Задачи
3. Скорость
3.1 Определение скорости
3.2 Вращение твердого тела
3.3 Разность скоростей между точками твердого тела
3.4 Многоугольники скоростей; Изображения скорости
3.5 Кажущаяся скорость точки в движущейся системе координат
3.6 Кажущаяся угловая скорость
3.7 Прямой контакт и контакт качения
3.8 Систематическая стратегия анализа скоростей
3.9 Алгебраический анализ скоростей
3.10 Комплексно-алгебраический анализ скоростей
3.11 Метод кинематических коэффициентов
3.12 Мгновенные центры скоростей
3.13 Теорема Арона Арона0013 3.14 Обнаружение мгновенных центров скоростей
3.15 Анализ скорости с использованием мгновенных центров
3.16 Теорема об отношении угловых скоростей
3.17 Отношения между кинематическими коэффициентами первого порядка и мгновенными центрами
3.
 18 Теорема Фрейденштейна
18 Теорема Фрейденштейна 3.19 Показатели качества Механическое преимущество
3.20 Центроды
3.21 Ссылки
3.22 Проблемы
4. Ускорение
4.1 Определение ускорения
4.2 Угловое ускорение
4.3 Разность ускорений между точками твердого тела
4.4 Изображения ускорений
4.5 Кажущееся ускорение точки в движущейся системе координат
4.6 Кажущееся угловое ускорение
4.7 Прямой контакт и контакт качения
4.8 Систематическая стратегия анализа ускорения
4.9 Алгебраический анализ ускорения
4.10 Комплексно-алгебраический анализ ускорений
4.11 Метод кинематических коэффициентов
4.12 Уравнение Эйлера-Савари
4.13 Построения Бобилье
4.14 Мгновенный центр ускорения
4.15 Окружность Бресса (или окружность де Лаира)
4.16 Радиус кривизны траектории точки с использованием кинематических коэффициентов
4.17 Куб стационарной кривизны
4.18 Ссылки
4.19 Задачи
5.19 Многоуровневые задачи
.
 9004 -Планар свободы Связи
9004 -Планар свободы Связи 5.1 Введение
5.2 Анализ осанки; Алгебраическое решение
5.3 Скоростной анализ; Многоугольники скорости
5.4 Мгновенные центры скорости
5.5 Кинематические коэффициенты первого порядка
5.6 Метод суперпозиции
5.7 Анализ ускорения; Ускоряние многоугольников
5,8 кинематические коэффициенты второго порядка
5.9 Кривиза пути траектории точки сцепления
5.10 Метод конечной разности
5.11 Ссылки
5.12 Проблемы
Часть 2. Конструкция механизмов
6. CAM Design
6.1. Введение
6.1.2 6. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4. 4.1.2 6.1.2 6.1.1 3. Кулачки и толкатели
6.3 Диаграммы смещения
6.4 Графическое представление профилей кулачков
6.5 Кинематические коэффициенты толкателя
6.6 Высокоскоростные кулачки
6.
 7 Стандартные движения кулачка
7 Стандартные движения кулачка 6.8 Согласованные производные от Диаграммы перемещений
6.9 Пластинчатый кулачок с возвратно-поступательным роликовым толкателем
6.10 Пластинчатый кулачок с возвратно-поступательным роликовым толкателем
6.11 Жесткие и упругие кулачковые системы
6.12 Динамика эксцентрикового кулачка
6.13 Эффект трения качения
6.14 Динамика следящего механизма Disating Cam
6.15 Динамика упругих кулачковых систем
6.16 Неуравновешенность, пульсация пружины и закручивание
6.17 Ссылки
6.18 Проблемы
7. Цилиндрические зубчатые колеса
7.1 Терминология и определения
7.2 Основной закон зубчатых передач
7.3 Взаимозаменяемые зубчатые колеса
Свойства 74013. Стандарты AGMA
7.5 Основы взаимодействия шестерни с зубом
7.6 Производство зубьев шестерни
7.7 Натяг и подрезание
7.8 Коэффициент контакта
7.9 Переменный центр Расстояние
7.10 Инволютометрия
7.
 11 Нестандартные зубы передач
11 Нестандартные зубы передач 7.12. Параллельно осевая передача. Зубчатые колеса, конические шестерни, червяки и червячные передачи
8.1 Параллельные косозубые шестерни
8.2 Взаимоотношение зубьев косозубой шестерни
8.3 Пропорции зубьев косозубой шестерни
8.4 Контакт зубьев косозубой шестерни
8.5 Замена прямозубых шестерен косозубыми
8.6 Шестерни типа «елочка»
8.7 Косозубые шестерни с перекрестными осями
8.8 Прямозубые конические шестерни
8.9 Пропорции зубьев конических шестерен
8.10 Коническая шестерня эпициклических передач
8.11 Корончатые и торцевые шестерни
8.12 Спирально-конические шестерни
8.13 Гипоидные передачи
8.14 Червяки и червячные передачи
8.15 Ремни и дифференциалы
8.16 Полноприводная передача
8.17 Примечание
8.18 Проблемы
9. Синтез звеньев0042
9.1 Тип, число и размерный синтез
9.2 Генерация функций, генерация пути и управление телом
9.
 3 Два конечно разделенных положения твердого тела ( N = 2)
3 Два конечно разделенных положения твердого тела ( N = 2) 9.4 Три конечно разделенных положения твердого тела ( N = 3)
9.5 Четыре конечно разделенных положения твердого тела ( N = 4)
9.6 Пять конечно разделенных положений твердого тела ( N =5)
9.7 Точные положения; структурная ошибка; Чебычев Интервал
9.8 Метод наложения
9.9 Синтез ответвителей-кривых
9.10 Родственные связи; Теорема Робертса-Чебычева
9.11 Уравнение Фрейденштейна
9.12 Аналитический синтез с использованием сложной алгебры
9.13 Синтез механизмов проживания
9.14 Прерывистое вращательное движение
9.15 Ссылки
9.16 Проблем
10.4 Анализ пространственной скорости и ускорения
10.5 Euler Agles
10.6 Параметры Denavit-Hartenberg
10.7 Анализ поленей трансформации матрицы
10.8 Скорость Матрицы и Анализ ускорения
10.9.
10.12 Задача прямой кинематики
10.13 Задача обратной кинематики
10.
 14 Обратная скорость и
Анализ ускорения
14 Обратная скорость и
Анализ ускорения 10.15 Анализ силовых приводов робота
10.16 Ссылки
10.17 Проблемы
Часть 3. Динамика машин
11. Анализ статической силы
11,1 Введение
11.2 Законы Ньютона
11,3 Системы единиц
11.4 Applied и конъюнктивные силы
11.3 Системы Units
11.4. Диаграммы
11.6 Условия равновесия
11.7 Стержни с двумя и тремя силами
11.8 Стержни с четырьмя и более силами
11.9 Модели силы трения
11.10 Анализ силы с трением
11.11 Анализ сил прямозубых и конических зубчатых колес
11.12 Анализ сил прямозубых конических зубчатых колес
11.13 Метод виртуальной работы
11.14 Введение в изгиб
11.18 Параболическое уравнение Джонсона.0013 12.4 Инерционные силы и принцип Д’Алемемберта
12,5 Принцип суперпозиции
12.6 Планарное вращение о фиксированном центре
12,7 встряхивания и моментов
12,8 Сложные алгебры. Преобразование осей инерции
12.
 12 Уравнения движения Эйлера
12 Уравнения движения Эйлера 12.13 Импульс и импульс
12.14 Угловой импульс и угловой момент
12.15 Литература
12.16 Задачи
13. Анализ вибрации
13.1 Дифференциальные уравнения движения
13.2 А Вертикальная модель. Затухающая вибрация
13.11 Реакция на периодическое воздействие
13.12 Гармоническое воздействие
13.13 воздействие, вызванное дисбалансом
13.14 Относительное движение
13.15 Изоляция
13.16 Метод Рейли
13.17 Первые и вторые критические скорости вала
13.18 Торсионные системы
13.19.1913 13.1013
.
14.1 Типы двигателей
14.2 Индикаторные диаграммы
14.3 Общий динамический анализ
14.4 Силы газа
14.5 Эквивалентные массы
14.6 Силы инерции
14,7 Нагрузки подшипника в одноцилиндровом двигателе
14,8 Встряхивания двигателей
14,9 Вычислительные подсказки
14.10 Проблемы
15. Балансировка
15,1 Статический несоблюдение
15,2 Уравнения Движения
15.
 3 СТАТА СТАТА БАЛИНСКИЙ МАКИНА БАЛИНСКИЙ МАКИНА
3 СТАТА СТАТА БАЛИНСКИЙ МАКИНА БАЛИНСКИЙ МАКИНА 15.2 Уравнения движения
15.3 СТАТА СТАТА БАЛИНСКИЙ МАКИНА БАЛИНСКИЙ МАКИНА
. дисбаланса
15.6 Динамическая балансировка
15.7 Динамические балансировочные станки
15.8 Балансировка в полевых условиях с помощью программируемого калькулятора
15.9 Балансировка одноцилиндрового двигателя
15.10 Балансировка многоцилиндровых двигателей
15.11 Аналитический метод балансировки многоцилиндровых двигателей
15.12 Балансировка соединений
15.13 Балансировка машин
15.14 Ссылки
15.15 Проблемы
2, гироскопы, маховики
16.1 Динамическая теория маховиков
16.2 Техника интеграции
16.3 Суммирование крутящего момента многоцилиндрового двигателя
16.4 Классификация регуляторов
16.5 Центробежные регуляторы
16.6 Инерционные регуляторы
16.7 Mechanical Control Systems
16.8 Standard Input Functions
16.9 Solution of Linear Differential Equations
16.
 10 Analysis of Proportional-Error Feedback Systems
10 Analysis of Proportional-Error Feedback Systems 16.11 Introduction to Gyroscopes
16.12 Motion of a Gyroscope
16.13 Steady or Regular Precession
16.14 Forced Precession
16.15 References
16.16 Проблемы
ПРИЛОЖЕНИЯ
Приложение A: Таблицы
Таблица 1 Стандартные префиксы системы СИ
Таблица 2 Преобразование традиционных единиц США в единицы СИ
Таблица 3 Преобразование единиц СИ в обычные единицы США
Таблица 4 Области и Моменты инерции площади
Таблица 5 Масса и Моменты инерции массы
Таблица 6 Эвольвентная функция
Приложение B: Ответы на некоторые задачи
Алфавитный указатель
Механика машинВторое издание Уильям Клегхорн и Николай Дечев | Орбитальная механикаВторое издание Джон Э. Пруссинг и Брюс А. Конвей |
Теория машин и механизмов
Мы используем файлы cookie, чтобы сделать ваше пребывание на нашем веб-сайте более удобным. Продолжая использовать наш веб-сайт, вы соглашаетесь на использование нами файлов cookie. Вы можете изменить настройки файлов cookie в любое время. Узнать больше
Продолжая использовать наш веб-сайт, вы соглашаетесь на использование нами файлов cookie. Вы можете изменить настройки файлов cookie в любое время. Узнать большеИндия
Расширенный поискВы здесь:
- Дом
- >Высшее образование
- >Инжиниринг
- >Машиностроение
- >Теория машин и механизмов
- > Теория машин и механизмов
Цена: 1050,00 индийских рупий
Мы продаем наши книги через другие компании
Амазонка
Перейти на сайт Амазон
флипкарт
Перейти на сайт флипкарт
Отказ от ответственности : Вы будете перенаправлены на сторонний веб-сайт. Исключительная ответственность за поставки, состояние продукта, наличие на складе, дату доставки, способ оплаты будет нести только указанная третья сторона. Цены и спецификации могут отличаться от веб-сайта OUP в Индии.
Цены и спецификации могут отличаться от веб-сайта OUP в Индии.ISBN:
9780199454167
Дата публикации:
26.12.2014
Мягкая обложка
788 страниц
243,0×187,0 мм
Цена: 1050,00 INR
Мы продаем наши книги через другие компании
Амазонка
Перейти на сайт Амазон
флипкарт
Перейти на сайт флипкарт
Отказ от ответственности : Вы будете перенаправлены на сторонний веб-сайт. Исключительная ответственность за поставки, состояние продукта, наличие на складе, дату доставки, способ оплаты будет нести только указанная третья сторона. Цены и спецификации могут отличаться от веб-сайта OUP в Индии.ISBN:
9780199454167
Дата публикации:
26.12.2014
Мягкая обложка
788 страниц
243,0×187,0 мм
Четвертое издание
Джон Дж. Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Это издание SI Theory of Machines and Mechanisms, International Fourth Edition, предназначено для использования в качестве учебника для студентов бакалавриата машиностроения, изучающих кинетику машин, динамику машин и/или механику машин.
Подходит для: Это издание SI Теории машин и механизмов, Международное четвертое издание, предназначено в качестве учебника для студентов старших курсов машиностроения, изучающих кинетику машин, динамику машин и/или механику машин. машины.
Права: Продается в (Непал, Бангладеш, Шри-Ланка, Мьянма, Пакистан, Малайзия, Сингапур, Бутан, Филиппины, Индонезия, Таиланд, Мальдивы)
Четвертое издание
Джон Дж. Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Описание
Это издание SI Теории машин и механизмов, международное четвертое издание, предназначено для использования в качестве учебника для студентов старших курсов машиностроения, изучающих кинетику машин, динамику машин и/или механику машин. машины.
Он обеспечивает всесторонний охват перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильного проектирования механических связей, кулачков и зубчатых систем. В книге представлены основы, обозначения и номенклатура, необходимые учащимся для понимания различных независимых технических подходов, существующих в области механизмов, кинетики и динамики. Все измерения представлены с использованием Международной системы единиц (СИ).
машины.
Он обеспечивает всесторонний охват перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильного проектирования механических связей, кулачков и зубчатых систем. В книге представлены основы, обозначения и номенклатура, необходимые учащимся для понимания различных независимых технических подходов, существующих в области механизмов, кинетики и динамики. Все измерения представлены с использованием Международной системы единиц (СИ).
Четвертое издание
Джон Дж. Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Содержание.
ЧАСТЬ 2 КОНСТРУКЦИЯ МЕХАНИЗМОВ
Глава 6. Конструкция кулачка
Глава 7. Цилиндрические шестерни
Глава 8. Косозубые, конические, червячные и червячные передачи
Глава 9. Поезда механизмов
Глава 10. Синтез рычажных механизмов
Глава 11. Пространственные механизмы
Глава 12. Робототехника
ЧАСТЬ 3 ДИНАМИКА МАШИН
Глава 13. Анализ статических сил
Глава 14.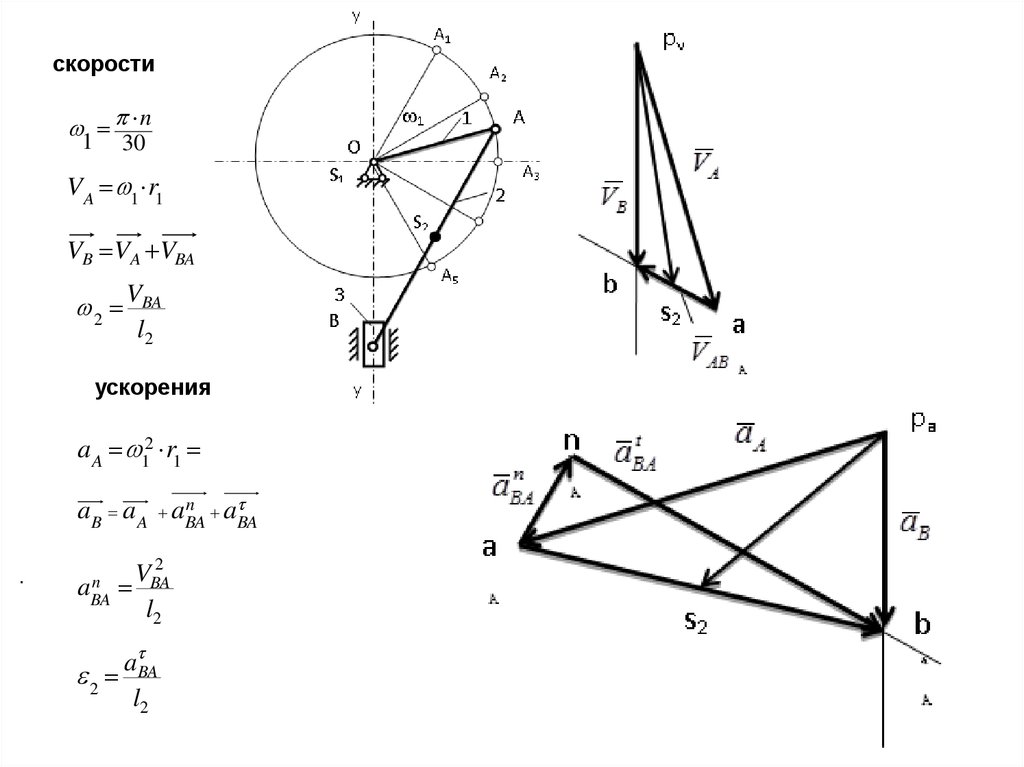 Анализ динамических сил
Анализ динамических сил
Глава 15. Вибрация Анализ
Глава 16. Динамика поршневых двигателей
Глава 17. Балансировка
Глава 18. Динамика кулачков
Глава 19. Маховики, регуляторы и гироскопы
Четвертое издание
Джон Дж. Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Особенности
- Предлагает сбалансированное освещение всех тем с использованием графических и аналитических методов
- Охватывает все основные аналитические подходы
- Включает метод кинематических коэффициентов, который четко отделяет кинематические (геометрические) эффекты от эффектов, зависящих от рабочей скорости или других динамические эффекты, а также объединяет охват рычагов, кулачков и зубчатых систем
- обеспечивает высокоточные графические решения для упражнений с использованием программного обеспечения САПР
- Онлайн-ресурсы
- Следующие ресурсы доступны для поддержки преподавателей и студентов, используя этот текст:
- Ресурсы преподавателей
- Руководство по решению
- MATLAB Solutions для выбранных проблем
- Рис. Ресурсы для учащихся
- Анимации выбранных рисунков
 Ресурсы для учащихся
Ресурсы для учащихсяЧетвертое издание
Джон Дж. Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Четвертое издание
Джон Дж. Уикер, Гордон Р. Пеннок и покойный Джозеф Э. Шигли
Описание
Это издание SI Теории машин и механизмов, международное четвертое издание, предназначено для использования в качестве учебника для студентов старших курсов машиностроения, изучающих кинетику машин, динамику машин и/или механику машин. машины.
Он обеспечивает всесторонний охват перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильного проектирования механических связей, кулачков и зубчатых систем. В книге представлены основы, обозначения и номенклатура, необходимые учащимся для понимания различных независимых технических подходов, существующих в области механизмов, кинетики и динамики. Все измерения представлены с использованием Международной системы единиц (СИ).