
Кинематические уравнения движения
Кинематические уравнения движения используются, чтобы описать перемещение объекта в пространстве. Так как при поступательном движении все точки объекта движутся одинаково, то его удобно представлять материальной точкой: она имеет определенную массу, однако её размерами можно пренебречь. Чтобы количественно описать движение точки, нужно ввести временную и пространственные координаты. При поступательном движении удобней всего пользоваться декартовой системой координат.
Положение такой точки в пространстве описывается радиус-вектором:
Можно спроектировать его на оси координат, тогда получим систему скалярных уравнений. Эти уравнения и называют кинематическими уравнениями движения:
Характеристики кинематического уравнения движения
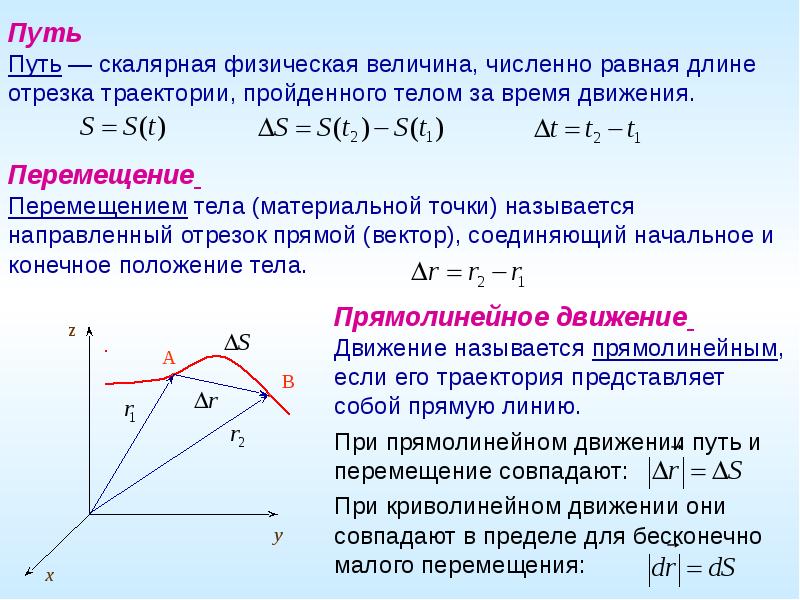
Длина пути точки, пройденного ею с начального момента до момента t, обозначается и является скалярной величиной. Если движение прямолинейное, то вектор перемещения , соединяющий начальное и конечное положение точки, совпадает с путем точки, .
Длина пути, пройденная точкой за конечное время t, может быть найдена с помощью формулы:
Здесь v – функция изменения скорости точки во времени, — начальная скорость, а – ускорение, t – время.
Если движение равномерное, то есть скорость остается неизменной, пройденный путь можно найти проще:
Скорость – величина векторная; она характеризует не только быстроту движения точки, но и направление этого движения. Она направлена так же, как и вектор перемещения. Средняя скорость может быть рассчитана:
Если интервал времени , вектор перемещения стремится к тому, чтобы совпадать с путем перемещения, и тогда может быть вычислена мгновенная скорость:
Ускорение точки (в векторном или скалярном виде) мы узнаем, взяв производную от скорости по времени:
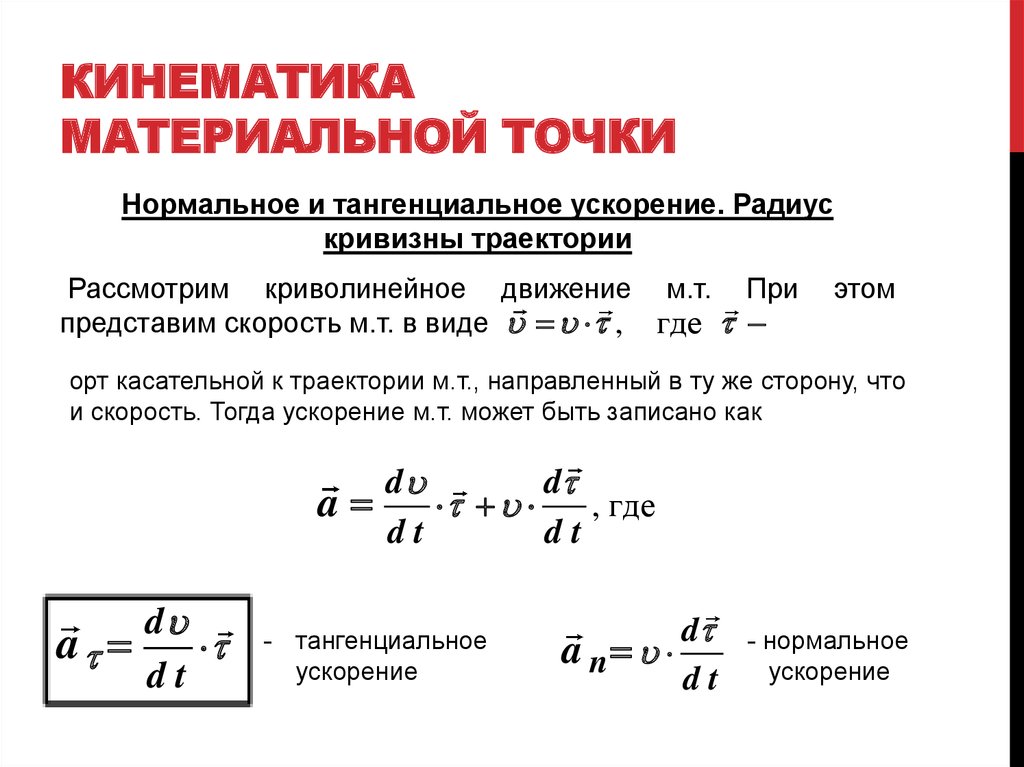
Если движение криволинейно, ускорение можно разложить на две составляющие: тангенциальное ускорение и центростремительное ускорение :
где R – это радиус кривизны рассматриваемой траектории. Модуль ускорения, включающего обе компоненты, при криволинейном движении:
Модуль ускорения, включающего обе компоненты, при криволинейном движении:
Если движение имеет прямолинейный характер, ускорение имеет только тангенциальную составляющую.
Примеры решения задач
Уравнение движения материальной точки
Определение 1Движение материальной точки в пространстве – это изменение ее положения относительно других тел с течением времени.
Имеет смысл говорить только о движении в некоторой системе отсчета.
Система отсчета. Системы координат
Точки, располагаемые в пустом пространстве, не различаются. Поэтому о точке рассуждают при условии нахождения в ней материальной точки. Определить ее положение можно при помощи измерений в системе координат, где и проводится нахождение пространственных координат. Если рассматривать в виде примера поверхность Земли, то следует учитывать широту и долготу располагаемой точки.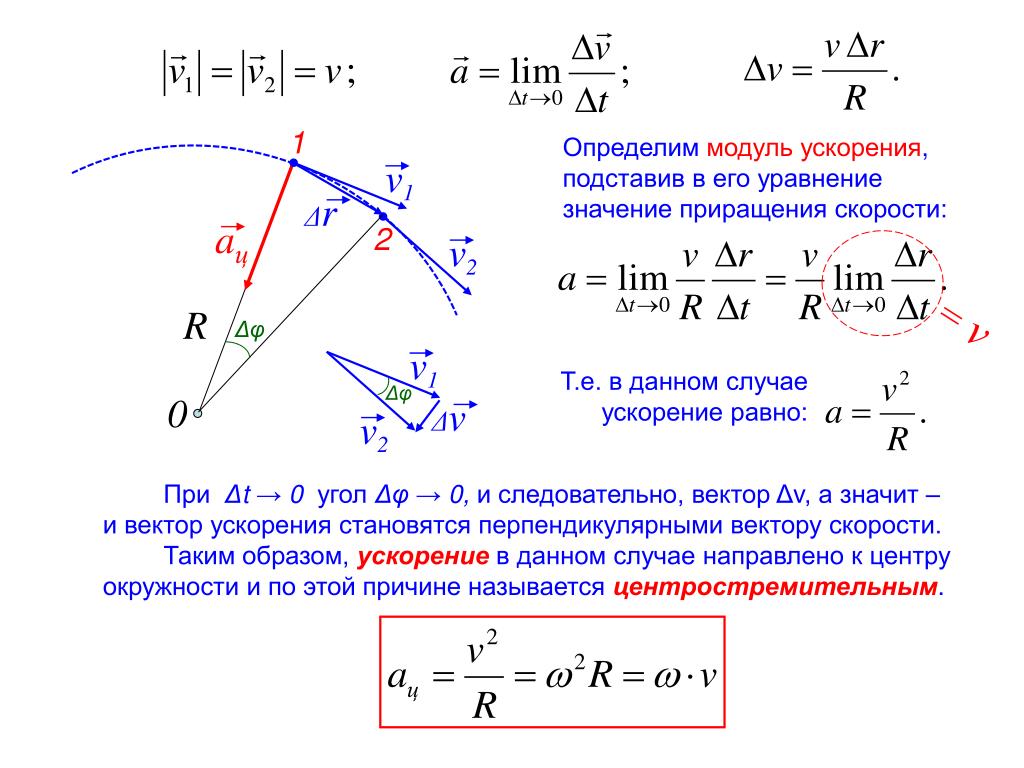
В теории используется декартова прямоугольная система координат, где определение точки возможно при наличии радиус-вектора r и трех проекций x, y, z – ее координат. Могут быть применены другие:
- сферическая система с положением точек и ее радиус-вектором, определенных координатами r, υ, φ;
- цилиндрическая система с координатами p, z, α;
- на полярной плоскости с параметрами r, φ.
В теории зачастую не принимают во внимание реальную систему отсчета, а сохраняют только ту, которая представляет собой ее математическую модель, применяемую во время практических измерений.
Кинематическое уравнение движения материальной точки
Любая система отсчета или координат предполагает определение координат материальной точки в любой момент времени.
Определение 2При условии положения и определения материальной точки в данной системе отсчета считается, что ее движение задано или описано.
Это возможно при использовании кинематического уравнения движения:
r¯=r¯(t) (1).
Аналитически положение точки определяется совокупностью трех независимых между собой чисел. Иначе говоря, свободная точка имеет три степени свободы движения.
Ее перемещение по уравнению (1) определено, если имеется указанное положение в любой момент времени t. Для этого следует задавать декартовы координаты точки в качестве однозначных и непрерывных функций времени:
x(t)=x, y(t)=y, z(t)=z (2).
Прямоугольные декартовы координаты x, y, z – это проекции радиус-вектора r¯, проведенного из начала координат. Очевидно, что длину и направление r¯ можно найти из соотношений, где a, β, γ являются образованными радиус-вектором углами с координатными осями.
Определение 4Равенства (2) считают кинематическими уравнениями движения материальной точки в декартовых координатах
Нужна помощь преподавателя?
Опиши задание — и наши эксперты тебе помогут!
Описать заданиеОни могут быть записаны в другой системе координат, которая связана с декартовой взаимно однозначным преобразованием.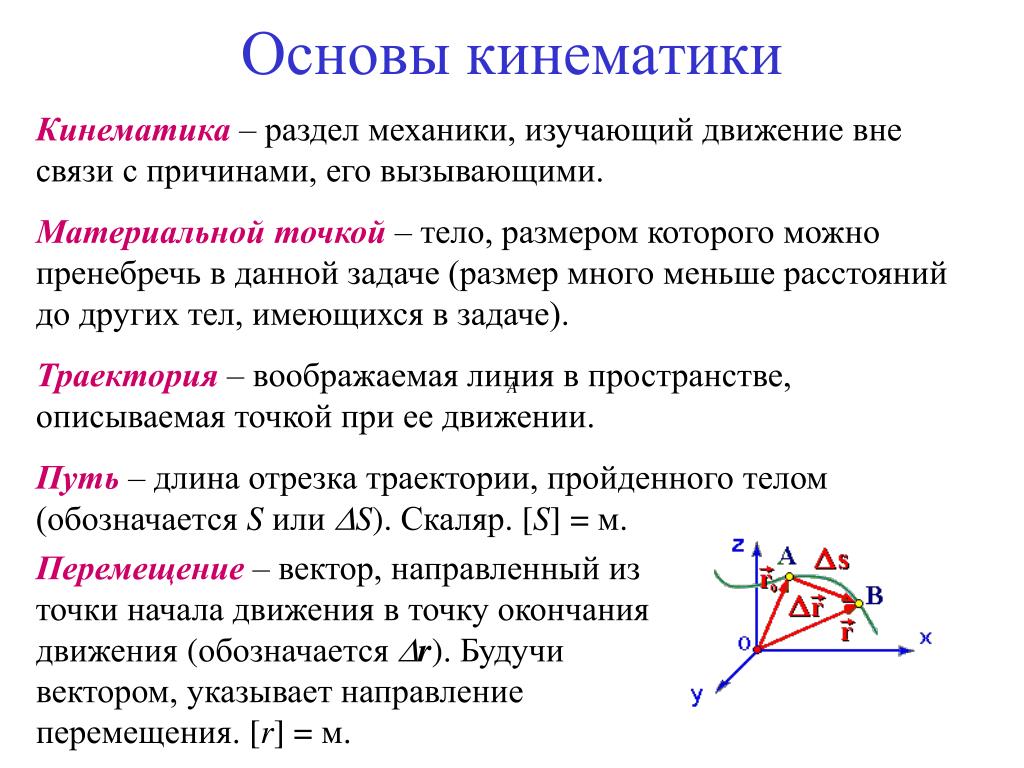 Если движение точки происходит в плоскости Оху, тогда применимы полярные координаты r, φ, относящиеся к декартовым преобразованиям. Данный случай подразумевает использование уравнения движения точки следующего вида:
Если движение точки происходит в плоскости Оху, тогда применимы полярные координаты r, φ, относящиеся к декартовым преобразованиям. Данный случай подразумевает использование уравнения движения точки следующего вида:
r=r(t), φ=φ(t) (3).
Кинематическое уравнение движения точки в криволинейных координатах q1, q2, q3, связанных с декартовыми преобразованиями вида x=x(q1, q2, q3), y=y(q1, q2, q3), z=z(q1, q2, q3) (4), записывается как
q1=q1(t), q2=q2(t), q3=q3(t) (5).
Кривая радиус-вектора, описываемая концом вектора r при движении точки, совпадает с ее траекторией. Параметрическое уравнение траектории с t представлено кинематическими уравнениями (2), (5). Чтобы получить координатное уравнение траектории следует исключить время из кинематических уравнений.
Определение 5Определение движения точки возможно с помощью задания траектории и мгновенного положения точки на ней. Ее положение на кривой определяется с помощью указания только одной величины: расстояния вдоль кривой от некоторой начальной точки с положительным направлением:
s=s(t).
Это и есть уравнение движения точки по траектории. Способ его задания относят к естественному или траекторному.
Понятия координатного и естественного способа задания движения точки физически эквивалентны. С математической стороны это рассматривают как возможность применения разных методов, исходя из случая математической задачи.
Задание такого закона возможно аналитическим, графическим путем или с использованием таблицы, последние два из которых зачастую рассматривают в виде графиков и расписаний движений поездов.
Дано уравнение движения материальной точки x=0,4t2. Произвести запись формулы зависимости υx(t), построить график зависимости скорости от времени. На графике отметить площадь, численно равную пути, пройденному точкой за 4 секунды, произвести вычисление.
Дано: x=0,4t2, t=4c
Найти: υx(t), S – ?
Решение
При решении необходимо учитывать зависимость скорости от времени:
υx=υ0x+axt.
Зависимость координаты от времени и сравнение уравнения с заданным принимает вид:
x=x0+υ0xt+axt22, x=0,4t2.
Очевидно, что x0=0, υ0x=0, ax=0,8 м/с2.
После подстановки данных в уравнение:
υx=0,8t.
Определим точки, изобразим график:
υx=0, t=0, υx=4, t=5
Рисунок 1
Путь, по которому двигалось тело, равняется площади фигуры, ограниченной графиком, и находится с помощью формулы:
S=0,4t2=6,4 м.
Ответ: S=6,4 м.
Кинематические уравнения движения материальной точки
Кинематические уравнения движения материальной точки задают ее положение в выбранной системе координат в любой момент времени. Траекторией точки называется геометрическое место последовательных положений точки в выбранной системе координат. Уравнения движения точки в конечном виде могут бытьКинематические уравнения движения материальной точки.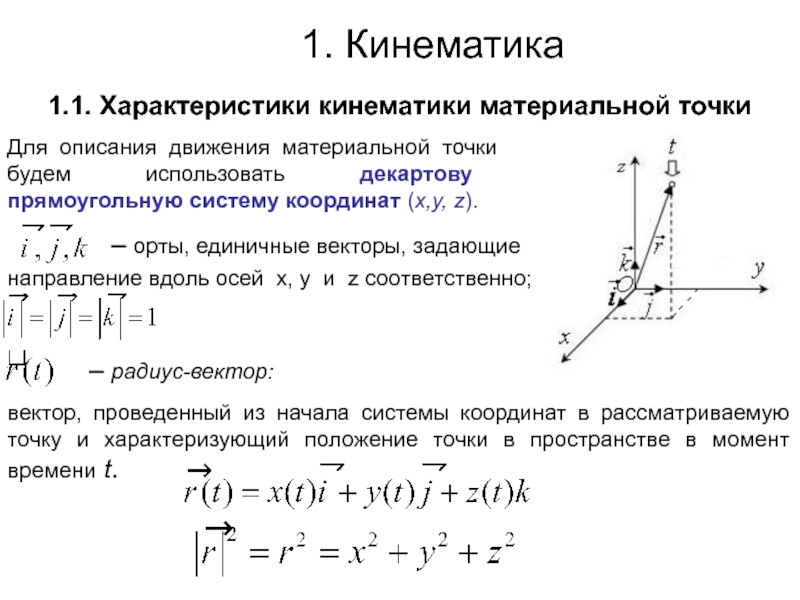 Если положение материальной точки в каждый момент времени определено в данной системе отсчета, то движение ее задано или описано. Это задание достигается в виде кинематического уравнения движения
[c.33]
Если положение материальной точки в каждый момент времени определено в данной системе отсчета, то движение ее задано или описано. Это задание достигается в виде кинематического уравнения движения
[c.33]
Равенства (1.2) являются кинематическими уравнениями движения материальной точки в декартовых координатах. Но уравнения могут быть записаны в любой другой системе координат, связанной с декартовой взаимно однозначным преобразованием. При движении точки в плоскости Оху часто бывает удобно пользоваться полярными
Подстановка найденных значений произвольных постоянных в общее решение уравнений движения (6.6) дает частное решение системы дифференциальных уравнений движения это искомые кинематические уравнения движения материальной точки [c.85]
Во многих задачах динамики рассматривается движение материальной точки относительно системы отсчета, движущейся относительно инерциальной системы. Дифференциальные уравнения движения материальной точки относительно таких подвижных, в общем случае неинерциальных, систем отсчета получают из уравнений движения точки относительно инерциальной системы отсчета и кинематической теоремы Кориолиса о сложении ускорений.
[c.249]
Дифференциальные уравнения движения материальной точки относительно таких подвижных, в общем случае неинерциальных, систем отсчета получают из уравнений движения точки относительно инерциальной системы отсчета и кинематической теоремы Кориолиса о сложении ускорений.
[c.249]
Период развития механики после Ньютона в значительной мере связан с именем Л. Эйлера (1707— 1783), отдавшего большую часть своей исключительно плодотворной деятельности Петербургской Академии наук, членом которой он стал в 1727 г. Эйлер развил динамику точки (им была дана естественная форма дифференциальных уравнений движения материальной точки) и заложил основы динамики твердого тела, имеющего одну неподвижную точку ( динамические уравнения Эйлера ), нашел решения этих уравнений при движении тела по инерции. Он же является основателем гидродинамики (дифференциальные уравнения движения идеальной жидкости), теории корабля и теории упругой устойчивости стержней. Эйлер получил ряд важных результатов и в кинематике (достаточно вспомнить углы и кинематические уравнения Эйлера, теорему о распределении скоростей в твердом теле).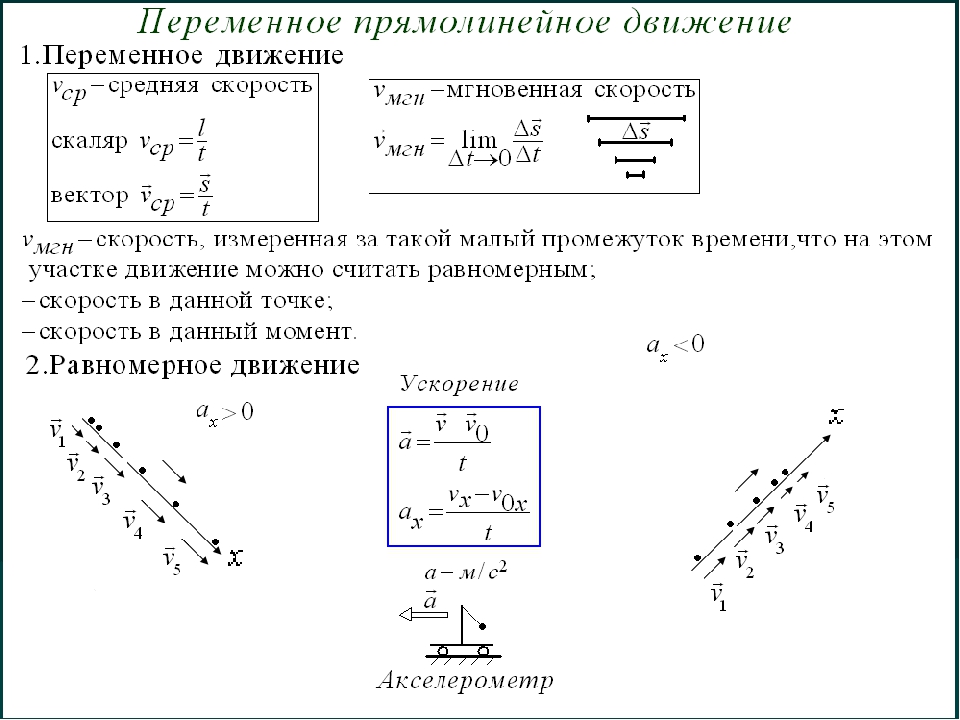 Ему принадлежит заслуга создания первого курса механики в аналитическом изложении.
[c.11]
Ему принадлежит заслуга создания первого курса механики в аналитическом изложении.
[c.11]
Динамическую систему, описываемую уравнениями движения материальной точки с ударным выходом на одностороннюю связь, назовем динамическим биллиардом. Частным случаем является классический кинематический биллиард, когда на материальную точку не действуют никакие силы и ее траектория определяется только ударными выходами на связь, а отрезок траектории между двумя последовательными ударами есть прямолинейное движение с постоянной скоростью. В общем случае динамического биллиарда движение материальной точки определяется не только ударами, но и действующими на точку силовыми полями [1. [c.204]
Движение материальной точки массой т — кг в плоскости задано кинематическими уравнениями вида r = t ф = 2 (г и ф — полярные координаты в метрах и радианах t — в секундах). Найти модуль действующей на точку силы F при ф = 2 рад. [c.78]
Обратим внимание на одно обстоятельство, которое легко усмотреть в только что решенной задаче.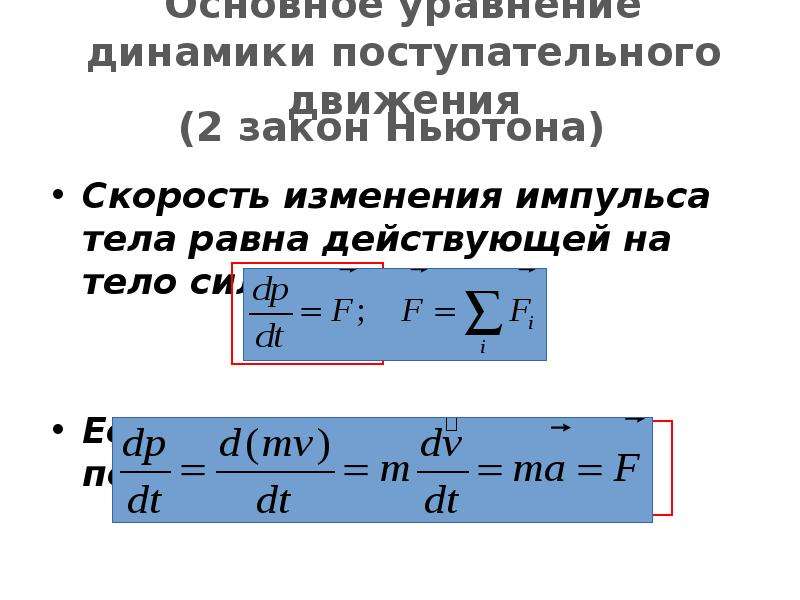 Определяя силу по заданному движению материальной точки, мы нашли, что движение произведено силой, являющейся функцией координат точки. Но мы могли бы выразить силу и как функцию времени. В самом деле, продифференцировав дважды кинематические уравнения и умножив вторые производные на т, найдем
[c.122]
Определяя силу по заданному движению материальной точки, мы нашли, что движение произведено силой, являющейся функцией координат точки. Но мы могли бы выразить силу и как функцию времени. В самом деле, продифференцировав дважды кинематические уравнения и умножив вторые производные на т, найдем
[c.122]
Первая основная задача динамики точки состоит в определении равнодействующей сил, вызывающих заданное движение материальной точки с известной массой. В зависимости от того, в какой форме задай закон движения точки, для определения равнодействующей сил можно применять уравнения движения в векторной, координатной или естественной форме. Во всех этих случаях задача сводится к определению ускорения из известных кинематических уравнений движения. Определение ускорения при этих условиях не связано, конечно, с какими-либо принципиальными трудностями, поэтому первую основную задачу динамики точки (прямую задачу) можно считать достаточно элементарной, хотя, решая именно эту задачу, И. Ньютон установил закон всемирного тяготения.
[c.321]
Ньютон установил закон всемирного тяготения.
[c.321]
Дано движение материальной точки заданной массы, т. е. известны координаты точки как функции времени — кинематические уравнения движения требуется найти силу, действуюш,ую на точку первая задача динамики). [c.20]
Дана сила, приложенная к материальной точке заданной массы требуется найти движение точки, т. е. кинематические уравнения движения вторая задача динамики). [c.20]
Сила Кориолиса. Равенство (4. 102) является основным кинематическим уравнением, служащим для получения динамических уравнений движения твердого тела. Однако оно применимо не только к движению твердого тела, но и к движению материальной точки или системы материальных точек во вращающейся системе координат. Одной из наиболее важных задач этого рода является задача о движении материальной точки относительно системы, связанной с вращающейся Землей. [c.154]
Снова пришли к равенству (9) и, следовательно, к уравнениям движения (10). Итак, эти уравнения получаются из рассмотрения связанной задачи вариационного исчисления при условии, что на искомых экстремалях учтены условия кинематической осуществимости окольного движения. Однако такая попытка сохранить вариационную формулировку принципа Гамильтона—Остроградского, вообще говоря, не приводит к цели, так как требования кинематической осуществимости смежного движения могут оказаться совместимыми с условиями (2) и уравнениями связей (1) только в случае интегрируемости этих уравнений. Это показывается на простом примере движения материальной точки при наличии неголономной связи )
[c.670]
Итак, эти уравнения получаются из рассмотрения связанной задачи вариационного исчисления при условии, что на искомых экстремалях учтены условия кинематической осуществимости окольного движения. Однако такая попытка сохранить вариационную формулировку принципа Гамильтона—Остроградского, вообще говоря, не приводит к цели, так как требования кинематической осуществимости смежного движения могут оказаться совместимыми с условиями (2) и уравнениями связей (1) только в случае интегрируемости этих уравнений. Это показывается на простом примере движения материальной точки при наличии неголономной связи )
[c.670]
Основная задача механики и заключается в динамическом описании движения материальной точки, устанавливающем связь между силовым полем, в котором движется материальная точка, и кинематическим уравнением ее движения. Эта связь отражена в дифференциальном уравнении тг — Р. [c.28]
Координаты твердого тела. Кинематические уравнения движения. Под твердым телом в механике понимается непрерывная система материальных точек, расстояния между которыми остаются неизменными. Аналитическое описание положения твердого тела в пространстве, а также изменения этого положения со временем, т. е. движения тела, должно определять положение и движение любой точки тела. Хотя число точек твердого тела неограниченно, число степеней свободы благодаря жестким связям невелико.
[c.44]
Под твердым телом в механике понимается непрерывная система материальных точек, расстояния между которыми остаются неизменными. Аналитическое описание положения твердого тела в пространстве, а также изменения этого положения со временем, т. е. движения тела, должно определять положение и движение любой точки тела. Хотя число точек твердого тела неограниченно, число степеней свободы благодаря жестким связям невелико.
[c.44]
Первая задача задано движение материальной точки с известной массой т, т. е. задано кинематическое уравнение движения (1.2) [c.82]
Заданные силы и силы реакции. Задача о движении несвободной материальной точки по сравнению со свободной видоизменяется следующим образом движение точки ограничено связями и на нее (вне зависимости от связей) действуют известные силы, они называются заданными силами. Требуется отыскать кинематические уравнения движения.
 По своей природе, как уже об этом говорилось, действие связей сводится к силам, приложенным к движущейся точке. Поэтому при известных уравнениях связи оказывается возможным подобрать такую добавочную к заданным силу, которая влияет на движение точки так же, как и связь. Это положение носит название принципа освобождаемости от связей. Добавочные силы, заменяющие связи, называются реакциями связей. Физически реакции связей имеют одинаковую природу с обычными силами.
[c.95]
По своей природе, как уже об этом говорилось, действие связей сводится к силам, приложенным к движущейся точке. Поэтому при известных уравнениях связи оказывается возможным подобрать такую добавочную к заданным силу, которая влияет на движение точки так же, как и связь. Это положение носит название принципа освобождаемости от связей. Добавочные силы, заменяющие связи, называются реакциями связей. Физически реакции связей имеют одинаковую природу с обычными силами.
[c.95]Движение двух материальных точек в системе центра масс. Движение изображающей точки в соответствии с уравнением (15.6) будет плоским, так как сила центральная ( 10.3). Пусть кинематическое уравнение движения найдено г = г 1). В таком случае с помощью формулы (15.2) находим и кинематические уравнения движения обеих материальных точек в Ц-системе [c.144]
Это уравнение траектории движения материальной точки по сфере. Если подставить сюда найденную функцию = (/), то получим второе кинематическое уравнение движения ф = ф([c. 198]
198]
При составлении дифференциальных уравнений движения системы материальных точек на основании общего уравнения динамики в форме (И.18а) необходимо принять во внимание, что среди т величин бйа независимых лишь т — а — I, так как они связаны а + I зависимостями, вытекающими из уравнений двусторонних геометрических и кинематических неголономных связей. [c.125]
Рассмотрим теперь подробнее величины, входящие в уравнение (5.3). Ускорение а представляет собой кинематическую величину, которую всегда можно получить опытно, независимо от уравнения (5.3). Масса т определяет свойство инерции тела. Для материальной точки понятие массы можно ввести на основе третьего закона Ньютона (всякое действие представляет собой взаимодействие с равными, но противоположно направленными силами). В самом деле, каждой материальной точке можно приписать значение постоянной величины—её массы, так что при движении любых двух изолированных взаимодействующих
[c. 23]
23]
В последних трех уравнениях первые члены справа представляют собой обычное центростремительное ускорение, соответствующее движению по меридиану (который при этом считается покоящимся) вторые члены представляют собой обычное центростремительное ускорение, соответствующее движению точки по параллели однако третьи члены представляют собой нечто новое, а именно кинематическое взаимодействие обоих движений. Умножив уравнения (28.4) на —т, получим силу инерции F, действующую на нашу материальную точку при ее сложном вращательном движении выразим ее в векторной форме [c.218]
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ (УРАВНЕНИЕ Д АЛАМБЕРА— ЛАГРАНЖА) — уравнение, характеризующее взаимосвязь кинематических и силовых параметров в каждый момент движения системы материальных точек с идеальными связями Для такой системы виртуальная работа всех активных сил и сил инерции на [c.205]
В механике используется определенная модель пространства и времени, а также система отсчета.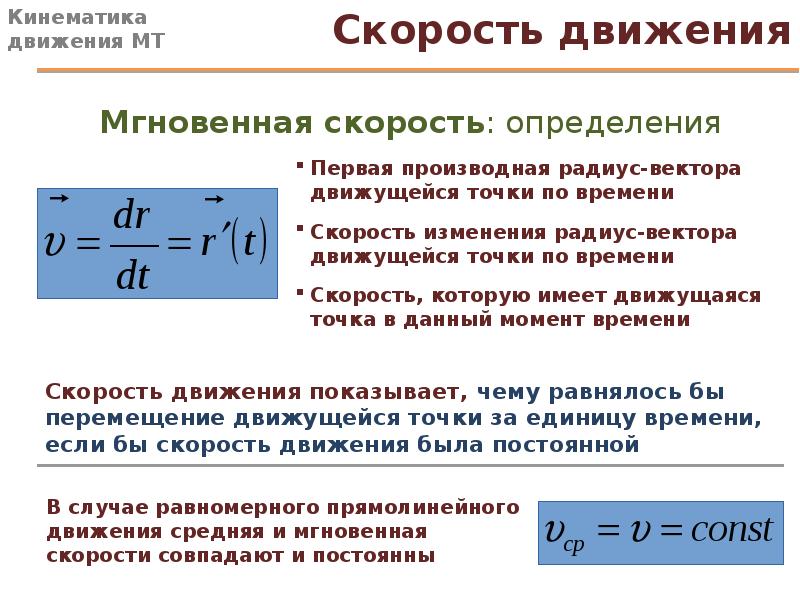 Тела, относительно которых рассматривается движение, заменяются системой отсчета, назначение которой состоит в том, чтобы иметь возможность различить положения движущейся материальной точки в пространстве в любой момент времени. С помощью жестких масштабов (для измерения длин и углов) и часов (для измерения времени) можно в каждый момент времени t определить в некоторой системе отсчета положение материальной точки г, т. е. кинематически описать ее движение, что выражается кинематическим уравнением г = г 1).
[c.28]
Тела, относительно которых рассматривается движение, заменяются системой отсчета, назначение которой состоит в том, чтобы иметь возможность различить положения движущейся материальной точки в пространстве в любой момент времени. С помощью жестких масштабов (для измерения длин и углов) и часов (для измерения времени) можно в каждый момент времени t определить в некоторой системе отсчета положение материальной точки г, т. е. кинематически описать ее движение, что выражается кинематическим уравнением г = г 1).
[c.28]
Поскольку все точки тела движутся одинаково, поступательное движение вполне описывается кинематическим законом движения одной произвольной точки тела, и, следовательно, тело, могущее совершать только поступательное движение, обладает тремя степенями свободы. Но уравнение движения одной замечательной точки тела -его центра масс – известно оно дается теоремой о движении центра масс (12.5). (Еще раз подчеркнем, что законы, доказанные для произвольной системы материальных точек, справедливы и для твердого тела как частного случая такой системы)
[c. 61]
61]
Основные кинематические соотношения имеют следующий вид. Так как мы предполагаем учесть нелинейные эффекты, то нам нужно различать материальную и текущую конфигурации. Пусть X — материальная (лагранжева) координата вдоль оси, перпендикулярной диску (рис. 7.13.1). Для одномерных движений уравнения (2.2.1), (2.2.4), (2.3.1), (2.2.3) и [c.526]
Главная идея, которая положена в основу вывода соответствующих динамических уравнений, связана с задачей чисто кинематического характера, которую мы рассматривали в кикематикег по заданному относительному движению точки и при известном движении подвижной системы координат определить абсолютную скорость и абсолютное ускорение точки. Мы воспользуемся этими результатами для того, чтобы научиться составлять уравнения движения материальной точки в неинерциальных системах отсчета. [c.365]
Заметим, что уравнения движения для поступательного (второй закон Ньютона) и вращательного (уравнение моментов) движений имеют одинаковую структуру с той лишь разницей, что. в уравнении моментов вместо линейного стоит угловое ускорение, вместо суммарной силы – суммарный момент сил, а вместо массы тела – его момент инерции относительно оси вращения. (Такое формальное и смысловое соответстзие величин и формул, описывающих поступательное и вращательное движение тела, можно проследить и далее – см. таблицу на с. 70.) Поэтому для тела, вращающегося относительно оси, можно ставить и решать такие же задачи, что и для движения материальной точки или поступательного движения тела. Например, прямая задача в случае вращательного движения, т.е. нахождение кинематического закона вращения (p t), состоит в решении дифференциального уравнения (19.11) при заданных начальных условиях решения задач о свободных колебаниях пружинного и физического маятников в 36).
[c.65]
в уравнении моментов вместо линейного стоит угловое ускорение, вместо суммарной силы – суммарный момент сил, а вместо массы тела – его момент инерции относительно оси вращения. (Такое формальное и смысловое соответстзие величин и формул, описывающих поступательное и вращательное движение тела, можно проследить и далее – см. таблицу на с. 70.) Поэтому для тела, вращающегося относительно оси, можно ставить и решать такие же задачи, что и для движения материальной точки или поступательного движения тела. Например, прямая задача в случае вращательного движения, т.е. нахождение кинематического закона вращения (p t), состоит в решении дифференциального уравнения (19.11) при заданных начальных условиях решения задач о свободных колебаниях пружинного и физического маятников в 36).
[c.65]
Свободные колебания без сопротивления. Точка, движущаяся по пря- Предположим, что на материальную точкой, совершает под дейст- у д/f [g2 на стр. 274) действует вием восстанавливающей г t /Го1ч силы гармоническое колеба- ТОЛЬКО восстанавливающая сила (131), сила ние же сопротивления (132) и возмущающая сила (133) равны нулю.
 Пусть начальная скорость точки М направлена по прямой МО или равна нулю. В таком случае точка М будет двигаться по прямой ОМ (по оси Ох), дифференциальное и кинематическое уравнения ее движения мы получим, положив в (135) и в (138) п и h равными нулю. В самом деле, если сила сопротивления / = 0, то, следовательно, а —О, потому что / =—О.Х и X переменная величина. Если же а=0, то равно нулю и п, которое согласно (134) равно . Аналогично, равенство нулю возмущающей силы означает, что равны нулю Hah.
[c.276]
Пусть начальная скорость точки М направлена по прямой МО или равна нулю. В таком случае точка М будет двигаться по прямой ОМ (по оси Ох), дифференциальное и кинематическое уравнения ее движения мы получим, положив в (135) и в (138) п и h равными нулю. В самом деле, если сила сопротивления / = 0, то, следовательно, а —О, потому что / =—О.Х и X переменная величина. Если же а=0, то равно нулю и п, которое согласно (134) равно . Аналогично, равенство нулю возмущающей силы означает, что равны нулю Hah.
[c.276]Следствие 5.6.1. Для того чтобы получить полный набор уравнений движения системы материальных точек, достаточно разрешить уравнения Аппеля относительно квазиускорений и к полученным обыкновенным дифференциальным уравнениям добавить кинематические уравнения системы. При этом число уравнений составит 2п — т и будет равно сумме числа координат и квазискоростей. [c.428]
Полученные результаты мы можем истолковать кинематически, рассматривая уравнения (5) как законы движения индивидуализированной точки, производные, dx/dt dy/dt как компоненты скорости этой точки, а производные d x/dt d y/dt как компоненты ускорения . Все эти термины мы должны понимать в применении в нагаей задаче условно, так как nania точка не есть материальная частица. Как мы увидим ниже, аналогия с движением материальных частиц в некоторых случаях может наругааться ). В дальнейгаем для координат
[c.187]
Все эти термины мы должны понимать в применении в нагаей задаче условно, так как nania точка не есть материальная частица. Как мы увидим ниже, аналогия с движением материальных частиц в некоторых случаях может наругааться ). В дальнейгаем для координат
[c.187]
Как отмечалось ранее, урав1 ения Ньютона справедливы только в инерциальных системах отсчета. Однако на практике часто встречаются и неинерциальные системы. Поэтому необходимо найти уравнения движения относительно таких систем. При этом естественно исходить из уравнений Ньютона, которые, как известно, содержат массы и ускорения материальных точек, а также силы, действующие на них со стороны других тел. Массы точек и время инвариантны относительно перехода от одной системы отсчета к другой, а силы являются функциями положений и ско-ростей точек. Таким образом, чтобы вывести интересующ ие нас уравнения движения, прежде всего нужно выяснить, как преобразуются положения, скорости и ускорения при переходе от инерциальной системы к неинерциальной системе отсчета.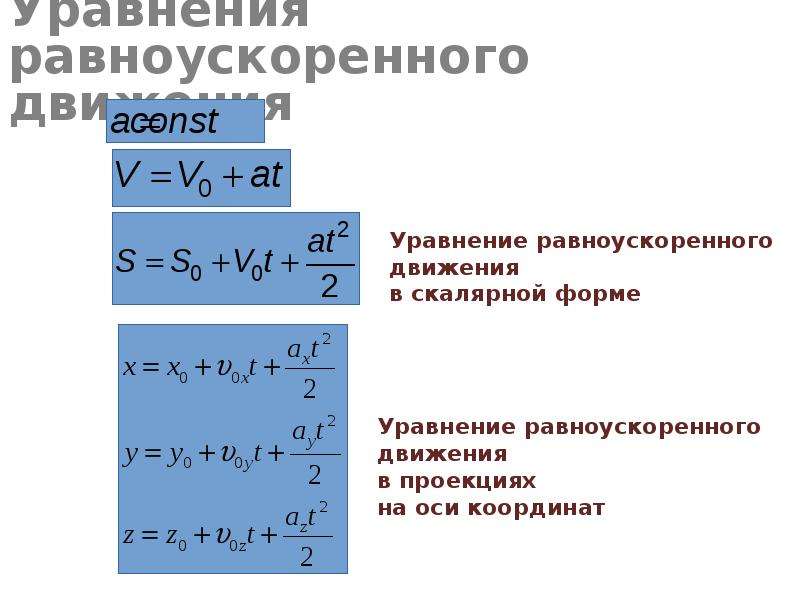 В свою очередь для решения этого вопроса следует с кинематической точки зрения проанализировать движение одной произвольной системы отсчета относительнб другой произвольной системы отсчета. Кстати напомним, что в классической механике системы отсчета мыслятся связанными с твердыми телами, поэтому кинематика движения одной системы отсчета относительно другой эквивалентна кинематике твердого тела.
[c.150]
В свою очередь для решения этого вопроса следует с кинематической точки зрения проанализировать движение одной произвольной системы отсчета относительнб другой произвольной системы отсчета. Кстати напомним, что в классической механике системы отсчета мыслятся связанными с твердыми телами, поэтому кинематика движения одной системы отсчета относительно другой эквивалентна кинематике твердого тела.
[c.150]
Впервые безразмерные числа были введены при рассмотрении вопроса о подобии течений. В гидродинамике часто приходится проводить эксперименты с моделями и потом уже полученные данные переносить на реальные тела. Простые рассуждения, основывающиеся на уравнениях движения для описания двух течений с различными гидродинамическими параметрами, приводят к тому, что для вязкой несжимаемой жидкости, когда отсутствуют внешние силы, а также внешние поверхности, два течения подобны, если, кроме кинематического подобия (т. е. геометрического подобия и подобия поля скоростей), для этих течений равны числа Рейнольдса. Число Рейнольдса Re=pu//1l=u//v (где I — характерный масштаб движения, например радиус трубы при движении в ней жидкости, V — скорость потока и V — кинематическая вязкость) играет очень большую роль в гидродинамике и акустике, и далее нам часто придется иметь с ним дело. Если необходимо учитывать наличие внешних сил, например силы тяжести, то в добавление к числу Ке оказывается необходимым ввести также еще число Фруда Рг=и // , и тогда два течения подобны, когда, кроме кинематического подобия, числа Ке и Рг обоих течений равны. При учете сжимаемости жидкости в рассмотрение необходимо включить еще число Маха М=и/с, где с — скорость звука в жидкости. Если учитывается теплопроводность жидкости, появляется безразмерное число Прандтля г= Ср1к= 1р 1=у1 1, представляющее собой материальную константу среды, не зависящую от свойств потока.
[c.21]
Число Рейнольдса Re=pu//1l=u//v (где I — характерный масштаб движения, например радиус трубы при движении в ней жидкости, V — скорость потока и V — кинематическая вязкость) играет очень большую роль в гидродинамике и акустике, и далее нам часто придется иметь с ним дело. Если необходимо учитывать наличие внешних сил, например силы тяжести, то в добавление к числу Ке оказывается необходимым ввести также еще число Фруда Рг=и // , и тогда два течения подобны, когда, кроме кинематического подобия, числа Ке и Рг обоих течений равны. При учете сжимаемости жидкости в рассмотрение необходимо включить еще число Маха М=и/с, где с — скорость звука в жидкости. Если учитывается теплопроводность жидкости, появляется безразмерное число Прандтля г= Ср1к= 1р 1=у1 1, представляющее собой материальную константу среды, не зависящую от свойств потока.
[c.21]
Уравнения, даваемые вторым законом Ньютона, позволяют решить целый ряд задач. Важнейшей является основная, или прямая задача динамики материальной точки, состоящая в том, чтобы в каждом конкретном случае уметь находить ее кинематический закон движения (1. 2). Для решения этой задачи помимо массы т точки должны быть известны формулы для всех действующих на нее сил (о силах, изучаемых в механике, и закономерностях, которым они подчиняются, см. 10). Однако и при наличии такой информации уравнения (7.2), записанные как алгебраические соотношения между силой и ускорением, дают возможность решить прямую задачу динамики по существу лишь для равнопеременного (а = onst) движения, которое происходит под действием постоянной силы (f = onst). В этом случае кинематический закон движения дается известными из школьного курса физики формулами x i) = x +v t+a r/l (и аналогичными для y t) и г(/)), в которых проекции ускорения определяются из уравнений (7.2), а начальные координаты Х , = х(0), = > (0), =2(0) и проекции скорости = v (0), Vj,, = v (0), v,D = v,(0) точки предполагаются заданными.
[c.29]
2). Для решения этой задачи помимо массы т точки должны быть известны формулы для всех действующих на нее сил (о силах, изучаемых в механике, и закономерностях, которым они подчиняются, см. 10). Однако и при наличии такой информации уравнения (7.2), записанные как алгебраические соотношения между силой и ускорением, дают возможность решить прямую задачу динамики по существу лишь для равнопеременного (а = onst) движения, которое происходит под действием постоянной силы (f = onst). В этом случае кинематический закон движения дается известными из школьного курса физики формулами x i) = x +v t+a r/l (и аналогичными для y t) и г(/)), в которых проекции ускорения определяются из уравнений (7.2), а начальные координаты Х , = х(0), = > (0), =2(0) и проекции скорости = v (0), Vj,, = v (0), v,D = v,(0) точки предполагаются заданными.
[c.29]
Типовые задачи на уравнения и графики прямолинейного равномерного движения. Примеры решения задач по физике. 9-10 класс
Типовые задачи на уравнения и графики прямолинейного равномерного движения.
 Примеры решения задач по физике. 9-10 класс
Примеры решения задач по физике. 9-10 класс- Подробности
- Просмотров: 1612
Задачи по физике – это просто!
Не забываем, что решать задачи надо всегда в системе СИ!
А теперь к задачам!
Элементарные задачи из курса школьной физики по кинематике.
Задача на составление описания движения и составление уравнения движения по заданному графику движения
Дано: график движения тела
Найти:
1.
составить описание движения
2. составить
уравнение движения тела.
Проекцию вектора скорости определяем по графику, выбрав любой удобный для рассмотрения отрезок времени.
Здесь удобно взять t=4c
Тогда:
Составляем уравнение движения тела:
Записываем формулу уравнения прямолинейного равномерного движения.
Подставляем в нее найденный коэффициент Vx (не забываем о минусе!).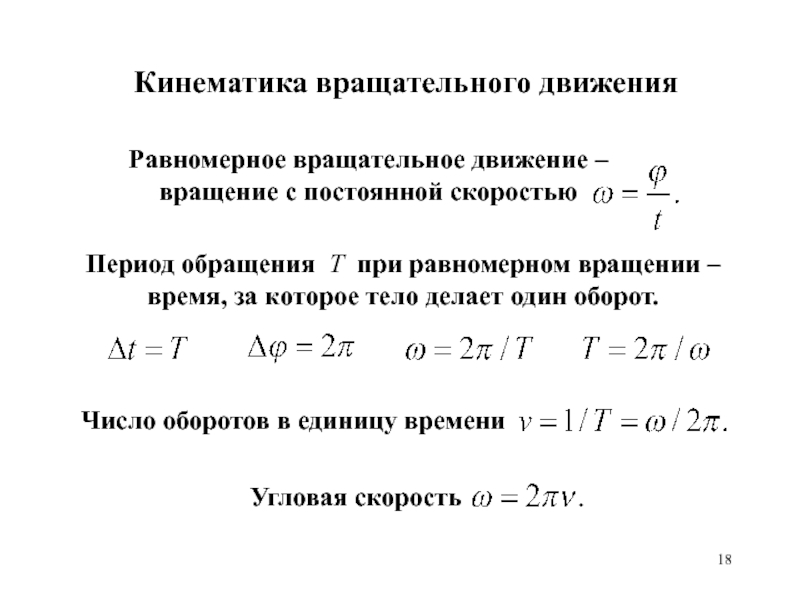
Начальная координата тела (Xо) соответствует началу графика, тогда Xо=3
Составляем описание движения тела:
Желательно сделать чертеж, это поможет не ошибиться!
Не забываем, что все физические величины имеют единицы измерения, их необходимо указывать!
Тело движется прямолинейно и равномерно из начальной точки Xо=3м со скоростью 0,75 м/с противоположно направлению оси X.
Задача на определение места и времени встречи двух движущихся тел (при прямолинейном равномерном движении)
Движение тел задано уравнениями движения для каждого тела.
Дано:
1.
уравнение движения первого тела
2. уравнение движения второго тела
Найти:
1. координату места встречи
2. момент время (после начала движения), когда произойдет встреча тел
По заданным уравнениям движения строим графики движения для каждого тела в одной системе координат.
Точка пересечения двух графиков движения определяет:
1.
на оси t – время встречи ( через сколько времени после начала движения произойдет встреча)
2. на оси X – координату места встречи (относительно начала координат)
В результате:
Два тела встретятся в точке с координатой -1,75 м через 1,25 секунд после начала движения.
Для проверки полученных графическим способом ответов можно решить систему уравнений из двух заданных
уравнений движения:
Все было верно!
Для тех, кто почему-то забыл, как построить график прямолинейного равномерного движения:
График движения – это линейная зависимость ( прямая), строится по двум точкам.
Выбираем два любых удобных для простоты расчета значения t1 и t2.
Для этих значений t подсчитываем соответствующие значения координат X1 и X2.
Откладываем 2 точки
с координатами (t1, X1) и (t2, X2) и соединяем их прямой – график готов!
Задачи на составление описания движения тела и построение графиков движения по заданному уравнению прямолинейного равномерного движения
Задача 1
Дано: уравнение движения тела
Найти:
1. составить описание движения
составить описание движения
2. построить график движения
Заданное уравнение сравниваем с формулой и определяем коэффициенты.
Не забываем делать чертеж, чтобы еще раз обратить внимание на направление вектора скорости.
Задача 2
Дано: уравнение движения тела
Найти:
1. составить описание движения
2. построить график движения
Задача 3
Дано: уравнение движения тела
Найти:
1. составить описание движения
2. построить график движения
Задача 4
Дано: уравнение движения тела
Найти:
1. составить описание движения
2. построить график движения
Описание движения:
Тело находится в состоянии покоя в точке с координатой X=4м (состояние покоя – это частный случай движения, когда скорость тела равна нулю).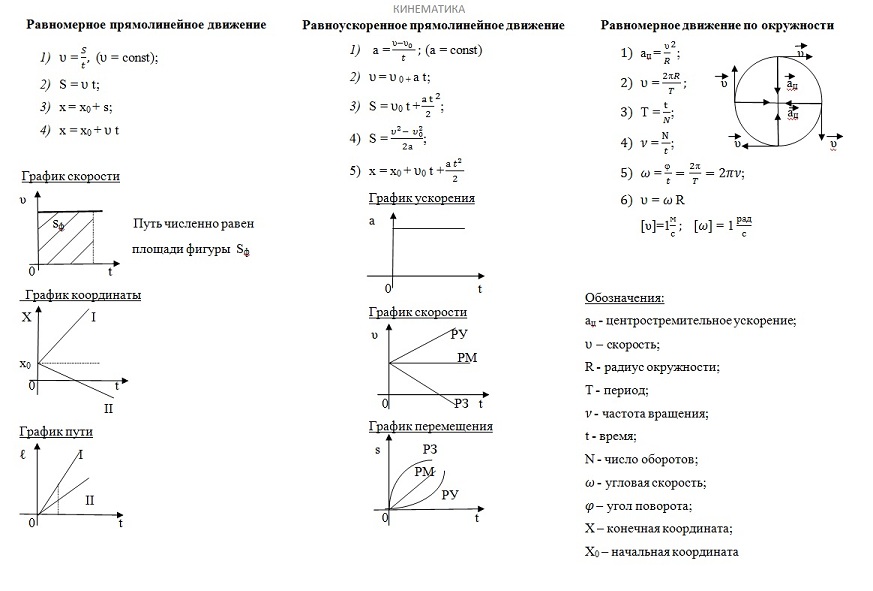
Задача 5
Дано:
начальная координата движущейся точки xo=-3 м
проекция вектора скорости Vx=-2 м/с
Найти:
1. записать уравнение движения
2. построить график движения
3. показать на чертеже векторы скорости и перемещения
4. найти координату точки через 10 секунд после начала движения
Кинематика вращения
Кинематика вращенияКинематика вращения
Для движения с постоянным угловым ускорением α = ( ω f – ω i ) / (t f – t i )
= Δ ω / Δt имеем
Δ ω = ω Δt, ω f = ω i + α Δt.
Это векторное уравнение. Это дает уравнение для каждой декартовой компоненты.
Для z-компоненты имеем
ω zf = ω zi + α z Δt.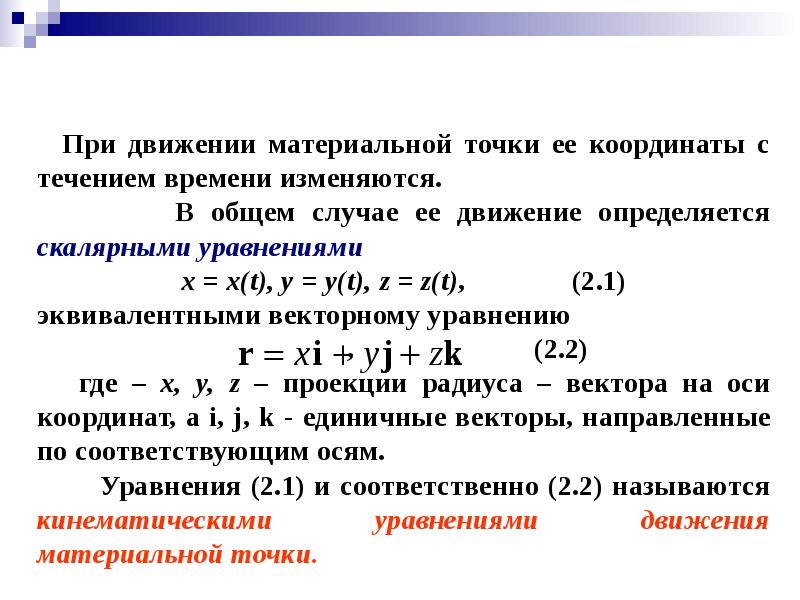
Если объект вращается вокруг оси Z, и нет других компонентов ω и α , мы часто теряем
индекс z и просто напишите
ω f = ω i +
αΔt.
Угловое смещение θ вокруг оси z тогда определяется как
∆θ = ∫ ti tf (dθ / dt) dt = ∫ ti тс ωdt = ω i (t f – t i )
+ ½ α (t f – t i ) 2 .
Кинематические уравнения движения с постоянным угловым ускорением
Если объект вращается вокруг фиксированной оси Z с постоянным угловым ускорение α, имеем Δω = αΔt,
ω f = ω i + α (t f – t i ).
Угловое смещение θ вокруг оси z тогда определяется как
θ f = θ i + ω i (t f – t i ) + ½α (t f – t i ) 2 .
Комбинируя эти два уравнения, получаем
ω f 2 = ω i 2 + 2α (θ f – θ i ).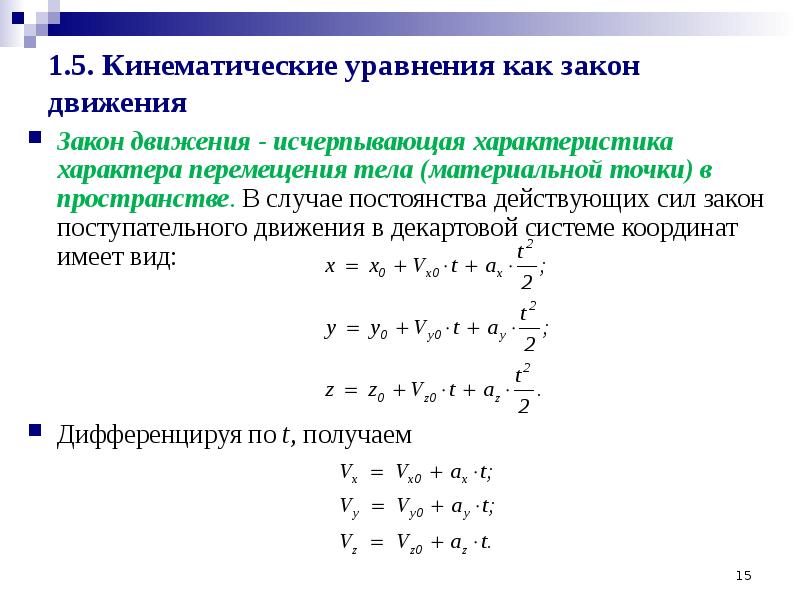
Эти уравнения имеют ту же форму, что и уравнения для линейного движения с постоянным ускорением a.
Для
движение по оси x имеем
v f = v i + a (t f – t i ),
x f – x i = v x (t f – t i ) + ½a (t f –
т и ) 2 .
v f 2 = v i 2 + 2a (x f – x i ).
Если мы заменим x на θ и a на α, то кинематическая уравнения для линейного движения вдоль оси x преобразуются в кинематические уравнения для вращательного движения вокруг оси z.
Проблема:
Лайнер прибывает на аэровокзал, двигатели заглушены.
выключенный. Ротор одного из двигателей имеет начальный поворот по часовой стрелке.
угловая скорость 2000 рад / с.Вращение двигателей замедляется с
угловое ускорение величиной 80 рад / с 2 .
(a) Определите угловую скорость через 10 с.
(b) Сколько времени нужно ротору, чтобы остановиться?
Решение:
- Рассуждение:
В этой задаче начальная угловая скорость ω i и угловое ускорение α . Если выбираем направление начального углового ускорения в направлении z, тогда
ω f = ω i – α (t f – t i ),
, поскольку α находится в отрицательном направлении оси z. - Детали расчетов
(a) При t = 0 ω i = 2000 / с.
При t = 10 с имеем ω f = 2000 / с – (80 / с 2 ) (10 с) = 1200 / с.
(б) Установка ω f = ω i – α (t f – t i ) = 0 мы можем найти время, за которое ротор придет отдыхать.
2000 / с – (80 / с 2 ) t = 0, t = (2000/80) с = 25 с – время, необходимое ротору для остановки.
Проблема:
Вращающемуся колесу требуется 3 с для вращения 37 оборотов. Его угловатый
скорость в конце 3-х секундного интервала 98 рад / с. Что
постоянное угловое ускорение колеса?
Его угловатый
скорость в конце 3-х секундного интервала 98 рад / с. Что
постоянное угловое ускорение колеса?
Решение:
- Рассуждение:
Дано: Δθ = θ f – θ i = 37 оборотов, Δt = 3 с, ω f = 98 рад / с.
С использованием θ f – θ i = ω i (t f – t i ) + ½α (t f – t i ) 2 и ω f = ω и + α (t f – t i ), у нас есть два уравнения, которые мы можем решить для двух неизвестных ω i и α. - Детали расчета:
Использование θ f = θ i + ω i (t f – t i ) + ½α (t f – t i ) 2 с θ i = 0, имеем 37 * 2π = ω i * (3 с) + ½α (3 с) 2 .
Используя ω f = ω i + α (t f – t i ) имеем 98 / s = ω i + α (3 с).
Решаем это уравнение относительно ω i ω i = 98 с – α (3 с), и вставить это в первое уравнение.
37 * 2π = (98 / с) (3 с) – α (3 с) 2 + ½α (3 с) 2 , 74π = 294 – α * (9 с 2 ) + α * (4,5 с 2 ),
(4,5 с 2 ) * α = 294 – 74π, α = 13,67 / с 2 – постоянный ускорение колеса.
Модуль 8: Вопрос 1
Кинематические уравнения движения с постоянным линейным ускорением и такой же вид имеют движения с постоянным угловым ускорением. Сравнивать движение с постоянной скоростью с движением с постоянной угловой скоростью.
Обсудите это со своими однокурсниками на дискуссионном форуме!
Когда колесо вращается вокруг оси Z, каждая точка колеса имеет одинаковый угловой
скорость. Однако линейная скорость v точки P зависит от расстояния до нее.
от оси вращения.
Когда точка P проходит угловое смещение 2π, то
пройденное расстояние s = 2πr.
Когда точка P проходит угловое смещение на π, то
пройденное расстояние s = πr.
Когда точка P проходит угловое смещение на θ, то
пройденное расстояние s = θr.
В единицах угловой скорости ω скорость v точки P
следовательно,
v = ds / dt = rdθ / dt = rω,
, если r является постоянным; v – это тангенциальная скорость точки P.
Ссылка: Тангенциальная и угловая скорость (Youtube)
тангенциальное ускорение a точки P, движущейся по круговой траектории, приведено в
с точки зрения его углового ускорения на t = dv / dt = rdω / dt = rα.
радиальное или центростремительное ускорение равно r = v 2 / r =
rω 2 .
Общее ускорение равно
a
= (a t 2 + a r 2 ) ½ =
(r 2 α 2 + r 2 ω 4 ) ½ = r (α 2 + ω 4 ) ½ .
Проблема:
Если колеса автомобиля заменены на колеса большего диаметра, показания спидометра поменять? Объяснять!
Решение:
- Рассуждение:
Датчик спидометра определяет угловую скорость колеса. Используя v номинальное = r номинальное ω, спидометр отображает правильная скорость, если шины имеют номинальный радиус. Если вы положите шины вашего автомобиля большего размера, тогда ваша фактическая скорость v фактическая = r фактическая ω больше, чем отображаемая скорость v номинальная = r номинальная ω.
Проблема:
Автомобиль равномерно ускоряется из состояния покоя и достигает скорости 22 м / с в
9 с. Если диаметр шины составляет 58 см, найдите
(a) число оборотов, которые шина делает во время этого движения, при условии, что нет
скольжение, и
(b) конечная скорость вращения шины в оборотах в секунду.
Решение:
- Рассуждение:
Дано равномерное ускорение автомобиля a = Δv / Δt. Мы можем использовать
кинематические уравнения для линейного движения, чтобы найти расстояние, которое оно проходит в
интервал времени Δt.
Мы можем использовать
кинематические уравнения для линейного движения, чтобы найти расстояние, которое оно проходит в
интервал времени Δt.
Разделив это расстояние на окружность шины, находим число революции сделано. Конечная угловая скорость определяется как ω f = v f / r шина . - Детали расчета:
(a) Ускорение автомобиля равно a = Δv / Δt = (22 м / с) / (9 с) = 2.44 м / с 2 .
Расстояние пройденный за 9 с равен d = ½ при 2 = (½ * 2,44 * 81) м = 99 м.
Окружность шины π * 0,58 м = 1,82 м.
Число оборотов колеса 99 / 1,82 = 54,3.
(b) Конечная линейная скорость шины v = 22 м / с. Используя v = ωr, ω = v / r, конечная угловая скорость составляет ω = 75,9 / с. Число оборотов в секунду составляет ω / 2π = 12 / с.
10.2 Кинематика вращательного движения – College Physics chapters 1-17
Сводка
- Соблюдайте кинематику вращательного движения.

- Составьте кинематические уравнения вращения.
- Оцените стратегии решения проблем для вращательной кинематики.
Просто используя нашу интуицию, мы можем начать видеть, как вращательные величины, такие как [латекс] \ boldsymbol {\ theta}, \: \ boldsymbol {\ omega}, [/ latex] и [латекс] \ boldsymbol {\ alpha} [ / latex] связаны друг с другом. Например, если колесо мотоцикла имеет большое угловое ускорение в течение довольно длительного времени, оно быстро вращается и совершает много оборотов.Говоря более техническим языком, если угловое ускорение колеса [латекс] \ boldsymbol {\ alpha} [/ latex] велико в течение длительного периода времени [латекс] \ boldsymbol {t}, [/ latex], то конечная угловая скорость [ latex] \ boldsymbol {\ omega} [/ latex] и угол поворота [latex] \ boldsymbol {\ theta} [/ latex] большие. Вращательное движение колеса в точности аналогично тому, что большое поступательное ускорение мотоцикла дает большую конечную скорость, и пройденное расстояние также будет большим.
Кинематика – это описание движения.Кинематика вращательного движения описывает отношения между углом поворота, угловой скоростью, угловым ускорением и временем. Давайте начнем с поиска уравнения, связывающего [латекс] \ boldsymbol {\ omega}, \: \ boldsymbol {\ alpha}, [/ latex] и [латекс] \ boldsymbol {t}. [/ Latex] Чтобы определить это уравнение, напомним знакомое кинематическое уравнение поступательного или прямолинейного движения:
[латекс] \ boldsymbol {v = v_0 + at \ textbf {(константа a)}} [/ латекс]
Обратите внимание, что во вращательном движении [латекс] \ boldsymbol {a = a _ {\ textbf {t}}}, [/ latex] и мы будем использовать символ [латекс] \ boldsymbol {a} [/ latex] для тангенциального или линейного ускорение с этого момента.Как и в линейной кинематике, мы предполагаем, что [латекс] \ boldsymbol {a} [/ latex] является постоянным, что означает, что угловое ускорение [латекс] \ boldsymbol {\ alpha} [/ latex] также является константой, потому что [латекс] \ boldsymbol {a = r \ alpha}.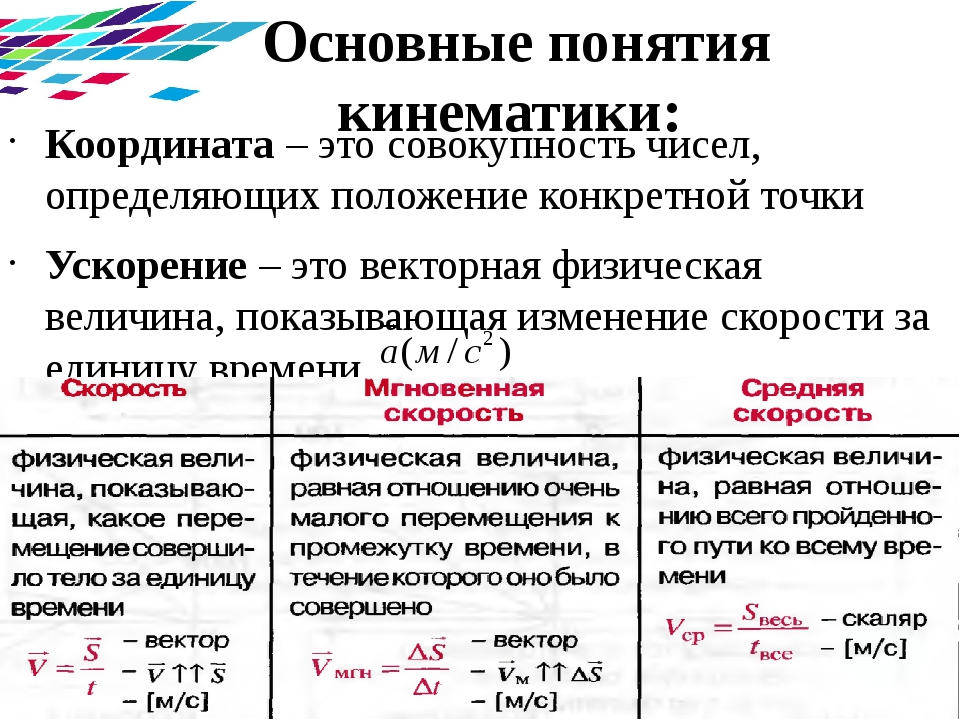 [/ latex] Теперь давайте заменим [latex] \ boldsymbol {v = r \ omega} [/ latex] и [latex] \ boldsymbol {a = r \ alpha} [/ latex ] в линейное уравнение выше:
[/ latex] Теперь давайте заменим [latex] \ boldsymbol {v = r \ omega} [/ latex] и [latex] \ boldsymbol {a = r \ alpha} [/ latex ] в линейное уравнение выше:
[латекс] \ boldsymbol {r \ omega = r \ omega_0 + r \ alpha {t}}. [/ Latex]
Радиус [латекс] \ boldsymbol {r} [/ latex] сокращается в уравнении, давая
[латекс] \ boldsymbol {\ omega = \ omega_0 + at \ textbf {(константа a),}} [/ latex]
где [латекс] \ boldsymbol {\ omega_0} [/ latex] – начальная угловая скорость.Это последнее уравнение представляет собой кинематическое соотношение между [latex] \ boldsymbol {\ omega}, \: \ boldsymbol {\ alpha}, [/ latex] и [latex] \ boldsymbol {t} [/ latex], т. Е. он описывает их отношения без ссылки на силы или массы, которые могут повлиять на вращение. По форме он аналогичен своему переводному аналогу.
ВЫПОЛНЕНИЕ ПОДКЛЮЧЕНИЙ
Кинематика вращательного движения полностью аналогична поступательной кинематике, впервые представленной в главе 2 «Одномерная кинематика».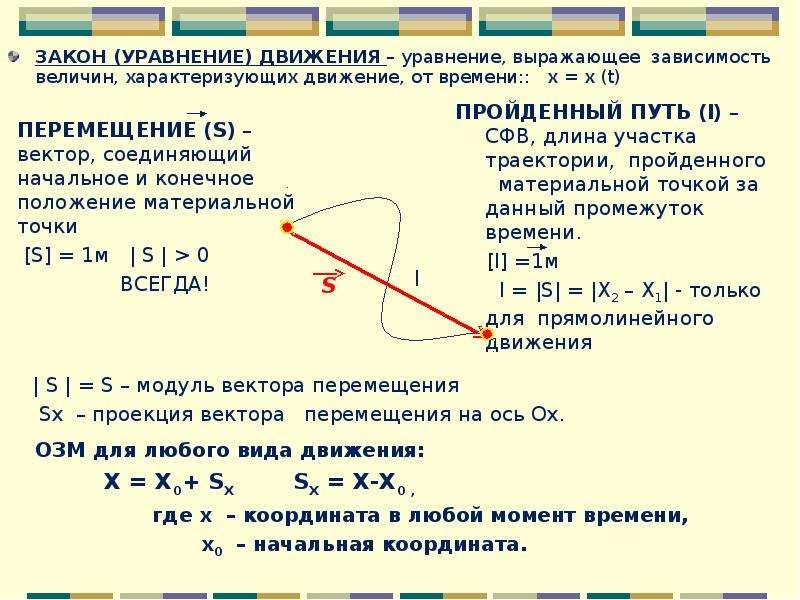 Кинематика занимается описанием движения без учета силы или массы. Мы обнаружим, что поступательные кинематические величины, такие как смещение, скорость и ускорение, имеют прямые аналоги во вращательном движении.
Кинематика занимается описанием движения без учета силы или массы. Мы обнаружим, что поступательные кинематические величины, такие как смещение, скорость и ускорение, имеют прямые аналоги во вращательном движении.
Исходя из четырех кинематических уравнений, которые мы разработали в главе 2 «Одномерная кинематика», мы можем вывести следующие четыре кинематических уравнения вращения (представленные вместе с их аналогами для поступательного движения):
| Вращающийся | Трансляционный | |
|---|---|---|
| [латекс] \ boldsymbol {\ theta = \ bar {\ omega} t} [/ latex] | [латекс] \ boldsymbol {x = \ bar {v} t} [/ латекс] | |
| [латекс] \ boldsymbol {\ omega = \ omega_0 + \ alpha {t}} [/ латекс] | [латекс] \ boldsymbol {v = v_0 + at} [/ латекс] | (константа [латекс] \ boldsymbol {\ alpha, \: a} [/ latex]) |
| [латекс] \ boldsymbol {\ omega = \ omega_0 {t} + \ frac {1} {2} \ alpha {t} ^ 2} [/ латекс] | [латекс] \ boldsymbol {x = v_0t + \ frac {1} {2} at ^ 2} [/ latex] | (константа [латекс] \ boldsymbol {\ alpha, \: a} [/ latex]) |
| [латекс] \ boldsymbol {\ omega ^ 2 = \ omega_0 ^ 2 + 2 \ alpha \ theta} [/ латекс] | [латекс] \ boldsymbol {v ^ 2 = v_0 ^ 2 + 2ax} [/ латекс] | (константа [латекс] \ boldsymbol {\ alpha, \: a} [/ latex]) |
Таблица 2.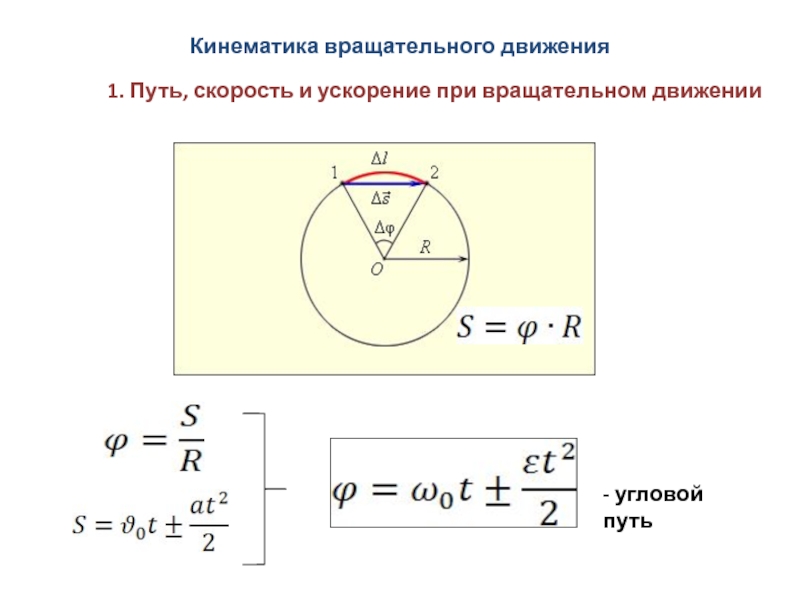 Вращательные кинематические уравнения. Вращательные кинематические уравнения. | ||
В этих уравнениях индекс 0 обозначает начальные значения ([latex] \ boldsymbol {\ theta_0}, \: \ boldsymbol {x_0}, [/ latex] и [latex] \ boldsymbol {t_0} [/ latex] – начальные значения), а средняя угловая скорость [латекс] \ boldsymbol {\ bar {\ omega}} [/ latex] и средняя скорость [латекс] \ boldsymbol {\ bar {v}} [/ latex] определяются следующим образом :
[латекс] \ boldsymbol {\ bar {\ omega} \: =} [/ latex] [латекс] \ boldsymbol {\ frac {\ omega_0 + \ omega} {2}} [/ latex] [латекс] \ textbf {и } \ boldsymbol {\ bar {v} \: =} [/ latex] [латекс] \ boldsymbol {\ frac {v_0 + v} {2}}.[/ латекс]
Уравнения, приведенные выше в таблице 2, могут использоваться для решения любой задачи кинематики вращения или поступательного движения, в которой [latex] \ boldsymbol {a} [/ latex] и [latex] \ boldsymbol {\ alpha} [/ latex] являются постоянными.
СТРАТЕГИЯ РЕШЕНИЯ ПРОБЛЕМ ДЛЯ ВРАЩАТЕЛЬНОЙ КИНЕМАТИКИ
- Изучите ситуацию, чтобы определить, задействована ли кинематика вращения (вращательное движение) .
 Должно быть задействовано вращение, но без учета сил или масс, влияющих на движение.
Должно быть задействовано вращение, но без учета сил или масс, влияющих на движение. - Определите, что именно необходимо определить в проблеме (определите неизвестные) . Набросок ситуации полезен.
- Составьте список того, что дано или может быть выведено из проблемы, как указано (определить известные) .
- Решите соответствующее уравнение или уравнения для определяемой величины (неизвестное значение) . Может быть полезно думать в терминах трансляционного аналога, потому что теперь вы знакомы с таким движением.
- Подставьте известные значения вместе с их единицами измерения в соответствующее уравнение и получите численные решения с единицами измерения . Обязательно используйте радианы для углов.
- Проверьте свой ответ, чтобы узнать, разумен ли он: Имеет ли смысл ваш ответ ?
Пример 1: Расчет ускорения рыболовной катушки
Глубоководный рыбак ловит большую рыбу, которая отплывает от лодки, выдергивая леску из своей рыболовной катушки.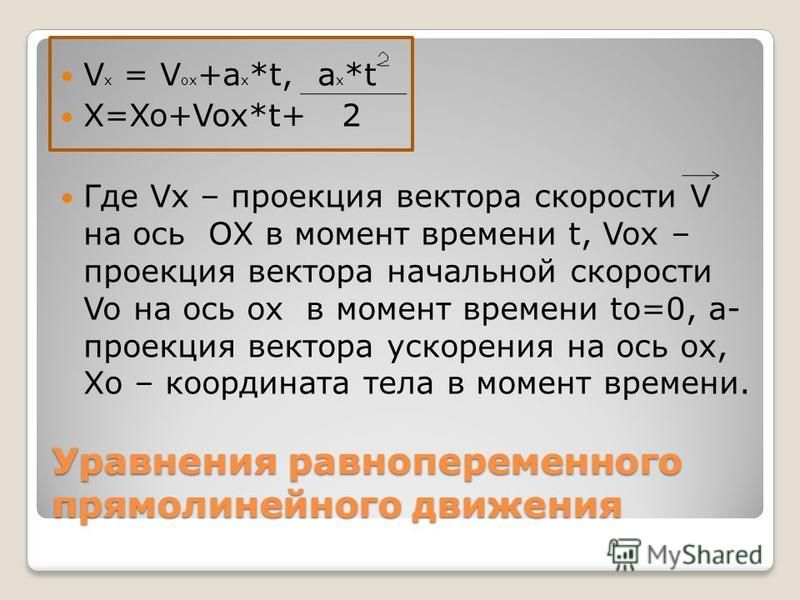 2} [/ latex] в течение 2,00 с, как показано на рисунке 1.
2} [/ latex] в течение 2,00 с, как показано на рисунке 1.
(а) Какова конечная угловая скорость мотовила?
(b) С какой скоростью леска покидает катушку по истечении 2,00 с?
(c) Сколько оборотов делает катушка?
(d) Сколько метров лески сошло с катушки за это время?
Стратегия
В каждой части этого примера стратегия такая же, как и для решения задач линейной кинематики. В частности, идентифицируются известные значения, и затем ищется взаимосвязь, которая может использоваться для решения неизвестного.
Решение для (а)
Здесь даны [латекс] \ boldsymbol {\ alpha} [/ latex] и [latex] \ boldsymbol {t} [/ latex] и необходимо определить [latex] \ boldsymbol {\ omega} [/ latex]. Наиболее простое в использовании уравнение – [латекс] \ boldsymbol {\ omega = \ omega_0 + \ alpha {t}} [/ latex], потому что неизвестное уже на одной стороне, а все остальные термины известны. Это уравнение утверждает, что
[латекс] \ boldsymbol {\ omega = \ omega_0 + \ alpha {t}. 2) (2.00 \ textbf {s}) = 220 \ textbf {рад / с.}} [/ Latex]
2) (2.00 \ textbf {s}) = 220 \ textbf {рад / с.}} [/ Latex]
Решение для (b)
Теперь, когда [латекс] \ boldsymbol {\ omega} [/ latex] известен, скорость [латекс] \ boldsymbol {v} [/ latex] проще всего определить с помощью соотношения
[латекс] \ boldsymbol {v = r \ omega,} [/ латекс]
, где радиус [латекс] \ boldsymbol {r} [/ латекс] катушки задан равным 4,50 см; таким образом,
[латекс] \ boldsymbol {v = (0,0450 \ textbf {m}) (220 \ textbf {rad / s}) = 9,90 \ textbf {m / s.}} [/ Latex]
Еще раз обратите внимание, что радианы всегда должны использоваться в любых вычислениях, касающихся линейных и угловых величин.Кроме того, поскольку радианы безразмерны, мы имеем [latex] \ boldsymbol {\ textbf {m} \ times \ textbf {rad} = \ textbf {m}}. [/ Latex]
Решение для (c)
Здесь нас просят найти количество оборотов. Поскольку [latex] \ boldsymbol {1 \ textbf {rev} = 2 \ pi \ textbf {rad}}, [/ latex], мы можем узнать количество оборотов, найдя [latex] \ boldsymbol {\ theta} [/ latex] в радианах.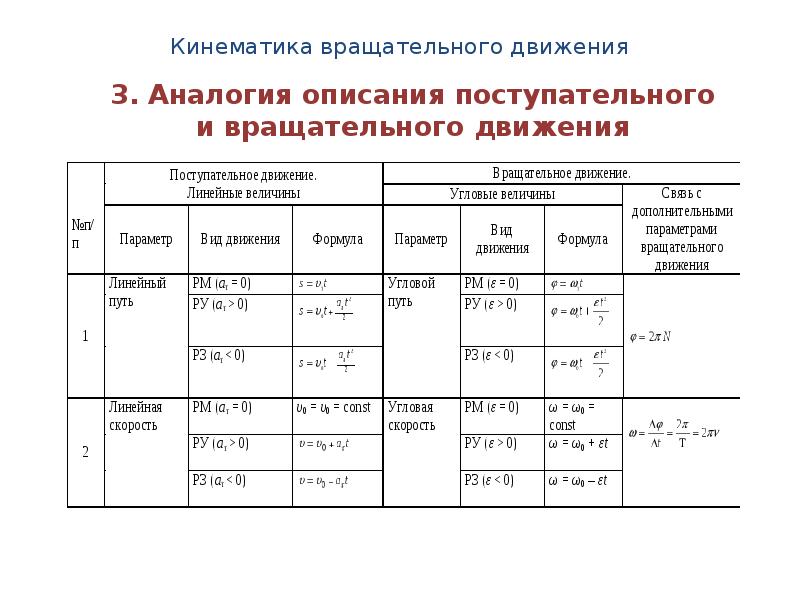 2}.2 = 220 \ textbf {рад.}} \ End {array} [/ latex]
2}.2 = 220 \ textbf {рад.}} \ End {array} [/ latex]
Преобразование радианов в обороты дает
[латекс] \ boldsymbol {\ theta = (220 \ textbf {rad})} [/ latex] [латекс] \ boldsymbol {\ frac {1 \ textbf {rev}} {2 \ pi \ textbf {rad}}} [/ latex] [latex] \ boldsymbol {= 35.0 \ textbf {rev.}} [/ latex]
Решение для (d)
Длина лески [latex] \ boldsymbol {x}, [/ latex] в метрах может быть получена через ее связь с [latex] \ boldsymbol {\ theta}: [/ latex]
[латекс] \ boldsymbol {x = r \ theta = (0.0450 \ textbf {m}) (220 \ textbf {rad}) = 9.90 \ textbf {m}}. [/ Latex]
Обсуждение
Этот пример показывает, что отношения между вращательными величинами очень похожи на отношения между линейными величинами. Мы также видим в этом примере, как связаны линейные и вращательные величины. Ответы на вопросы реалистичны. После раскручивания в течение двух секунд катушка вращается со скоростью 220 рад / с, что составляет 2100 об / мин. 2}} [/ latex] [латекс] \ boldsymbol {= 0.733 \ textbf {s.}} [/ Latex]
2}} [/ latex] [латекс] \ boldsymbol {= 0.733 \ textbf {s.}} [/ Latex]
Обсуждение
Обратите внимание, что следует проявлять осторожность со знаками, указывающими направление различных величин. Также обратите внимание, что время остановки барабана довольно мало, потому что ускорение довольно велико. Леска иногда ломается из-за участвующих в ней ускорений, и рыбаки часто позволяют рыбе плавать некоторое время, прежде чем тормозить катушку. Уставшая рыба будет медленнее, требуя меньшего ускорения.
Пример 3: Расчет медленного ускорения поездов и их колес
Большие грузовые поезда очень медленно ускоряются.2}. [/ Latex] После того, как колеса сделали 200 оборотов (предположим, что проскальзывания нет): (a) Как далеко поезд продвинулся по рельсам? б) Какова конечная угловая скорость колес и линейная скорость поезда?
Стратегия
В части (a) нас просят найти [latex] \ boldsymbol {x}, [/ latex], а в (b) нас просят найти [latex] \ boldsymbol {\ omega} [/ latex] и [ латекс] \ boldsymbol {v}.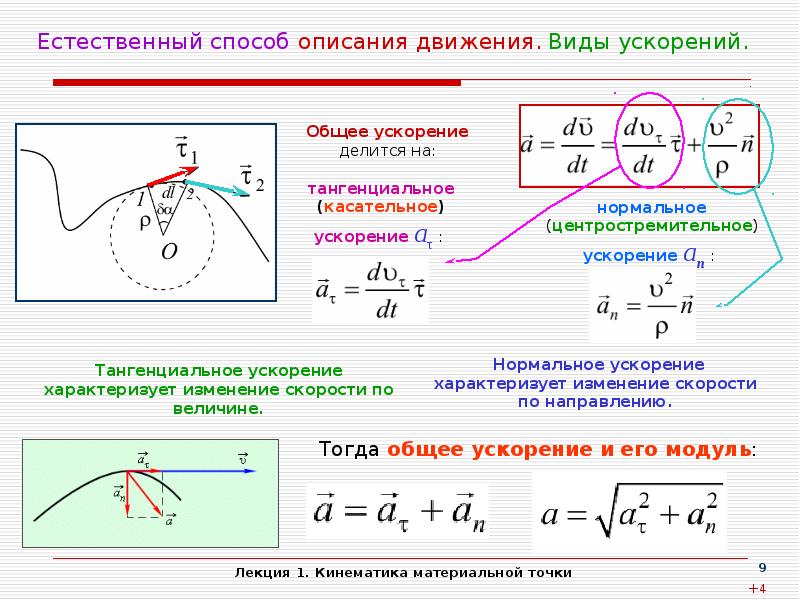 [/ latex] Нам даны количество оборотов [латекс] \ boldsymbol {\ theta}, [/ latex] радиус колес [латекс] \ boldsymbol {r}, [/ латекс ] и угловое ускорение [латекс] \ boldsymbol {\ alpha}.[/ латекс]
[/ latex] Нам даны количество оборотов [латекс] \ boldsymbol {\ theta}, [/ latex] радиус колес [латекс] \ boldsymbol {r}, [/ латекс ] и угловое ускорение [латекс] \ boldsymbol {\ alpha}.[/ латекс]
Решение для (а)
Расстояние [латекс] \ boldsymbol {x} [/ latex] очень легко найти из зависимости между расстоянием и углом поворота:
[латекс] \ boldsymbol {\ theta \: =} [/ latex] [латекс] \ boldsymbol {\ frac {x} {r}}. [/ Latex]
Решение этого уравнения для [latex] \ boldsymbol {x} [/ latex] дает
[латекс] \ boldsymbol {x = r \ theta}. [/ Latex]
Перед использованием этого уравнения мы должны преобразовать количество оборотов в радианы, потому что мы имеем дело с соотношением между линейными и вращательными величинами:
[латекс] \ boldsymbol {\ theta = (200 \ textbf {rev})} [/ latex] [латекс] \ boldsymbol {\ frac {2 \ pi \ textbf {rad}} {1 \ textbf {rev}}} [/ латекс] [латекс] \ boldsymbol {= 1257 \ textbf {рад. 2 + 2 \ alpha \ theta} [/ латекс]
2 + 2 \ alpha \ theta} [/ латекс]
Извлечение квадратного корня из этого уравнения и ввод известных значений дает
[латекс] \ begin {array} {lcl} \ boldsymbol {\ omega} & \ boldsymbol {=} & \ boldsymbol {[0 + 2 (0.{1/2}} \\ {} & \ boldsymbol {=} & \ boldsymbol {25.1 \ textbf {rad / s.}} \ End {array} [/ latex]
Мы можем найти линейную скорость поезда, [latex] \ boldsymbol {v}, [/ latex] через его связь с [latex] \ boldsymbol {\ omega}: [/ latex]
[латекс] \ boldsymbol {v = r \ omega = (0.350 \ textbf {m}) (25.1 \ textbf {rad / s}) = 8.77 \ textbf {m / s.}} [/ Latex]
Обсуждение
Пройденное расстояние довольно велико, а конечная скорость довольно мала (чуть менее 32 км / ч).
Существует поступательное движение даже для чего-то, вращающегося на месте, как показано в следующем примере. На рис. 2 изображена муха на краю вращающейся пластины микроволновой печи. В приведенном ниже примере вычисляется общее пройденное расстояние.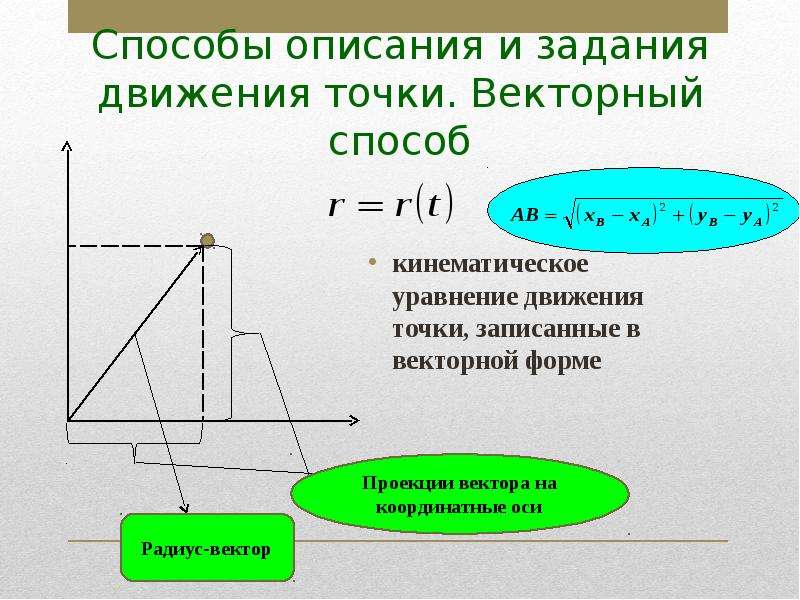
Пример 4: Расчет расстояния, пройденного мухой на краю плиты микроволновой печи
Человек решает использовать микроволновую печь, чтобы разогреть обед.При этом муха случайно влетает в микроволновку, приземляется на внешний край вращающейся пластины и остается там. Если тарелка имеет радиус 0,15 м и вращается со скоростью 6,0 об / мин, рассчитайте общее расстояние, пройденное мухой за 2,0-минутный период приготовления. (Игнорируйте время запуска и замедления.)
Стратегия
Сначала найдите общее количество оборотов [latex] \ boldsymbol {\ theta}, [/ latex], а затем линейное расстояние [latex] \ boldsymbol {x} [/ latex], пройденное.[latex] \ boldsymbol {\ theta = \ bar {\ omega} t} [/ latex] можно использовать для поиска [latex] \ boldsymbol {\ theta} [/ latex], потому что [latex] \ boldsymbol {\ bar {\ omega}} [/ latex] задано 6,0 об / мин.
Решение
Ввод известных значений в [latex] \ boldsymbol {\ theta = \ bar {\ omega} t} [/ latex] дает
[латекс] \ boldsymbol {\ theta = \ bar {\ omega} t = (6.0 \ textbf {rpm}) (2.0 \ textbf {min}) = 12 \ textbf {rev}.} [/ Latex]
Как всегда, необходимо преобразовать обороты в радианы перед вычислением линейной величины, такой как [latex] \ boldsymbol {x} [/ latex], из угловой величины, такой как [latex] \ boldsymbol {\ theta}: [/ latex]
[латекс] \ boldsymbol {\ theta = (12 \ textbf {rev})} [/ latex] [латекс] \ boldsymbol {\ frac {2 \ pi \ textbf {rad}} {1 \ textbf {rev}}} [/ латекс] [латекс] \ boldsymbol {= 75.4 \ textbf {rad}.} [/ Latex]
Теперь, используя соотношение между [latex] \ boldsymbol {x} [/ latex] и [latex] \ boldsymbol {\ theta}, [/ latex], мы можем определить пройденное расстояние:
[латекс] \ boldsymbol {x = r \ omega = (0.15 \ textbf {m}) (75.4 \ textbf {rad}) = 11 \ textbf {m}}. [/ Latex]
Обсуждение
Неплохая поездка (если выживет)! Обратите внимание, что это расстояние – это полное расстояние, пройденное мухой. Смещение фактически равно нулю для полных оборотов, потому что они возвращают муху в исходное положение.Различие между общим пройденным расстоянием и перемещением было впервые отмечено в главе 2 «Одномерная кинематика».
Смещение фактически равно нулю для полных оборотов, потому что они возвращают муху в исходное положение.Различие между общим пройденным расстоянием и перемещением было впервые отмечено в главе 2 «Одномерная кинематика».
Проверьте свое понимание
1: Кинематика вращения имеет множество полезных взаимосвязей, часто выражаемых в форме уравнений. Являются ли эти отношения законами физики или они просто описательны? (Подсказка: тот же вопрос относится к линейной кинематике.)
Задачи и упражнения
1: С помощью струны гироскоп ускоряется из состояния покоя до 32 рад / с за 0.40 с.
(а) Каково его угловое ускорение в рад / с 2 ?
(б) Сколько оборотов он совершает в процессе?
2: Предположим, на компакт-диске оказался кусок пыли. Если скорость вращения компакт-диска составляет 500 об / мин, а пылинка находится на расстоянии 4,3 см от центра, какое общее расстояние проходит пыль за 3 минуты? (Игнорируйте ускорения из-за вращения компакт-диска. )
)
3: Гироскоп замедляется с начальной скорости 32.2}. [/ Latex]
(a) Каково угловое ускорение его шин радиусом 0,280 м, если предположить, что они не скользят по тротуару?
(b) Сколько оборотов делают шины перед остановкой, учитывая их начальную угловую скорость [латекс] \ boldsymbol {95.0 \ textbf {rad / s}} [/ latex]?
(c) Сколько времени нужно автомобилю, чтобы полностью остановиться?
(d) Какое расстояние машина проезжает за это время?
(e) Какова была начальная скорость автомобиля?
(f) Кажутся ли полученные значения разумными, учитывая, что эта остановка происходит очень быстро?
Рисунок 3.2}, [/ latex] какое угловое ускорение у йо-йо?(б) Какова угловая скорость через 0,750 с, если она начинается из состояния покоя?
(c) Внешний радиус йо-йо составляет 3,50 см. Каково тангенциальное ускорение точки на краю?
Глоссарий
- кинематика вращательного движения
- описывает отношения между углом поворота, угловой скоростью, угловым ускорением и временем
Решения
Проверьте свое понимание
1: Кинематика вращения (как и линейная кинематика) носит описательный характер и не отражает законы природы. 2} [/ латекс]
2} [/ латекс]
б) 450 рад / с
в) 21,0 м / с
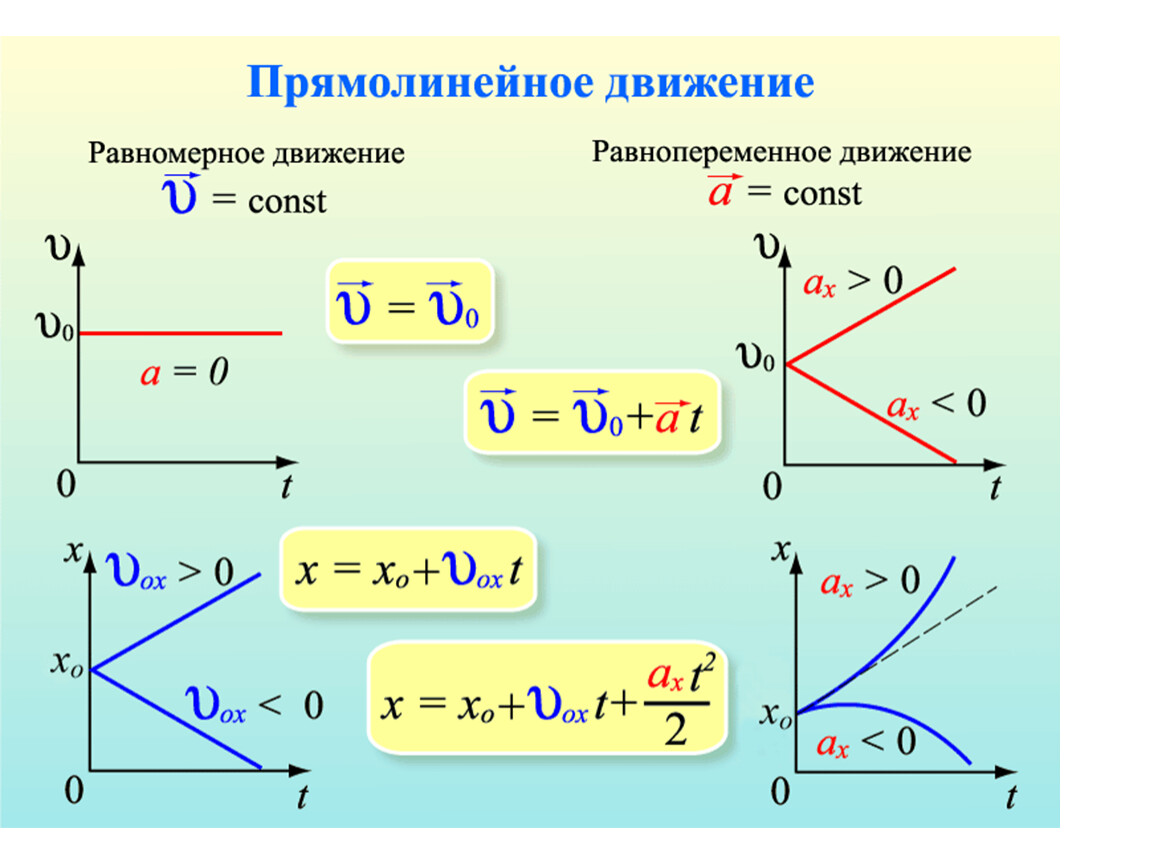
Одномерное (прямолинейное) движение.
Кинематика – это «геометрия движения». Он описывает движение без использования понятий силы и массы. В этой главе нас интересуют новаторские работы Галилея в области кинематики, посвященные проблемам движения с постоянным ускорением, включая движение падающих тел.
Определения:
Скорость: v = (x 2 – x 1 ) / (t 2 – t 1 ), что может быть записано v = Δx / Δt
Ускорение: a = (v 2 – v 1 ) / (t 2 – t 1 ), что может быть записано a = Δv / Δt
|
Символ Δ – это оператор, означающий «изменение». Мы будем использовать жирные символы для положения, смещения, скорости и ускорения в наших уравнениях, чтобы подчеркнуть, что это величины, которые могут иметь как положительные, так и отрицательные знаки, и что этот знак указывает направление движения вдоль линии. Очень важно, чтобы вы указали направление, которое вы выбираете для вызова «+», прежде чем начинать задачу, поскольку относительные знаки имеют значение. Сделав этот выбор, не меняйте его, решая задачу.Мы также ожидаем того факта, что эти величины являются векторными величинами, и когда мы расширим это представление, включив в него двух- и трехмерное движение, мы будем нуждаться в том, чтобы рассматривать определенные физические величины как векторы, а жирный шрифт – традиционный способ обозначить, что величины являются векторами.
Приведенные выше уравнения действительны для любого вида движения, если вы возьмете предел исчисления правых частей, поскольку Δt стремится к нулю. Но в частном случае прямолинейного движения, когда ускорение постоянно, скорость остается той же, независимо от того, используете ли вы большой или малый интервал времени, Δt, и, поскольку ускорение постоянно, оно также не зависит от размера временной интервал.График скорость-время представляет собой прямую линию, и мы можем написать:
Но в частном случае прямолинейного движения, когда ускорение постоянно, скорость остается той же, независимо от того, используете ли вы большой или малый интервал времени, Δt, и, поскольку ускорение постоянно, оно также не зависит от размера временной интервал.График скорость-время представляет собой прямую линию, и мы можем написать:
|
Эти два могут быть немедленно объединены, чтобы получить уравнение
для любых двух точек 1 и 2 на прямой. d = x 2 – x 1 – это смещение положения, которое происходит в течение временного интервала t.
Это последний раз, когда мы будем использовать понятие средней скорости, поскольку оно бесполезно при решении проблем.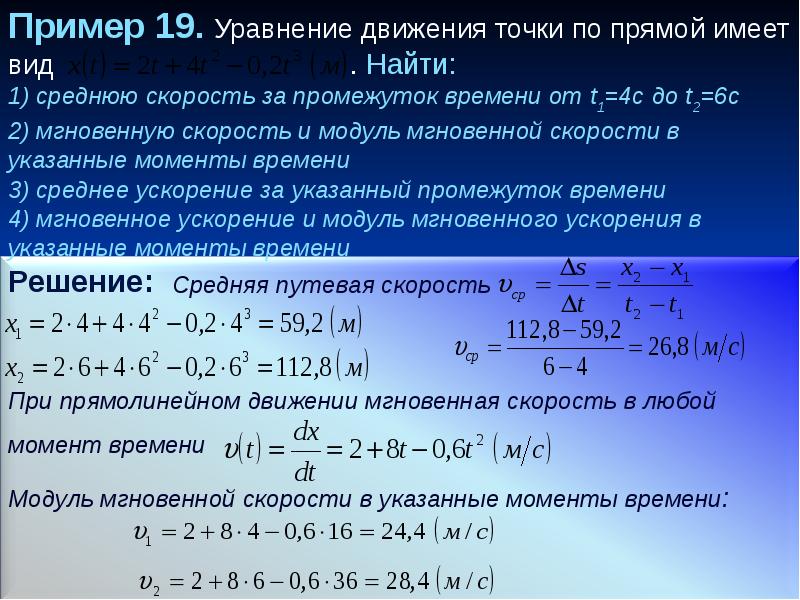 По правде говоря, он используется здесь только для того, чтобы не вводить исчисление, но его использование правомерно в этом частном случае постоянного ускорения.
По правде говоря, он используется здесь только для того, чтобы не вводить исчисление, но его использование правомерно в этом частном случае постоянного ускорения.
Предполагаемые начальные условия: Тело имеет смещение d = 0 при t = 0, а его скорость при t = 0 составляет v o .Иногда мы называем t = 0 и t “начальной” и “конечной” скоростями, но на самом деле это просто моменты времени, когда движущееся тело оказывается в двух разных положениях, выбранных потому, что они представляют для нас особый интерес. в решении проблем. Метки «начальный» и «конечный» относятся только к конечным точкам рассматриваемого временного интервала.
Приведенные ниже уравнения являются результатами, действительными только для случая постоянного ускорения.
Используйте уравнение 5, записанное для «начальной» и «конечной» скоростей v o и v .Затем решите уравнение относительно d .
Решите уравнение 7 для v
Поместите это в уравнение 9.
Наконец, умножьте уравнение 7 на уравнение 9 и переставьте, чтобы получить:
Мы выделили ускорение и смещение жирным шрифтом, чтобы напомнить вам, что в этом уравнении знаки этих векторных величин все еще важны. Символ • может трактоваться просто как означающий «умножение величин, включая их знаки».Позже, когда мы займемся двух- и трехмерным движением, этот символ приобретет новое значение.
Уравнения 9, 11 и 12 иногда называют «уравнениями движения Галилея», но помните, что у Галилея не было преимуществ алгебраических обозначений, которые мы здесь используем. Важным моментом является то, что эти уравнения следуют из определений скорости и ускорения Галилео путем непосредственной алгебраической манипуляции. Здесь мы видим способность математики преобразовывать простые предложения в более полезные формы: уравнения, которые мы можем использовать для анализа движения и прогнозирования результатов движения в конкретных случаях.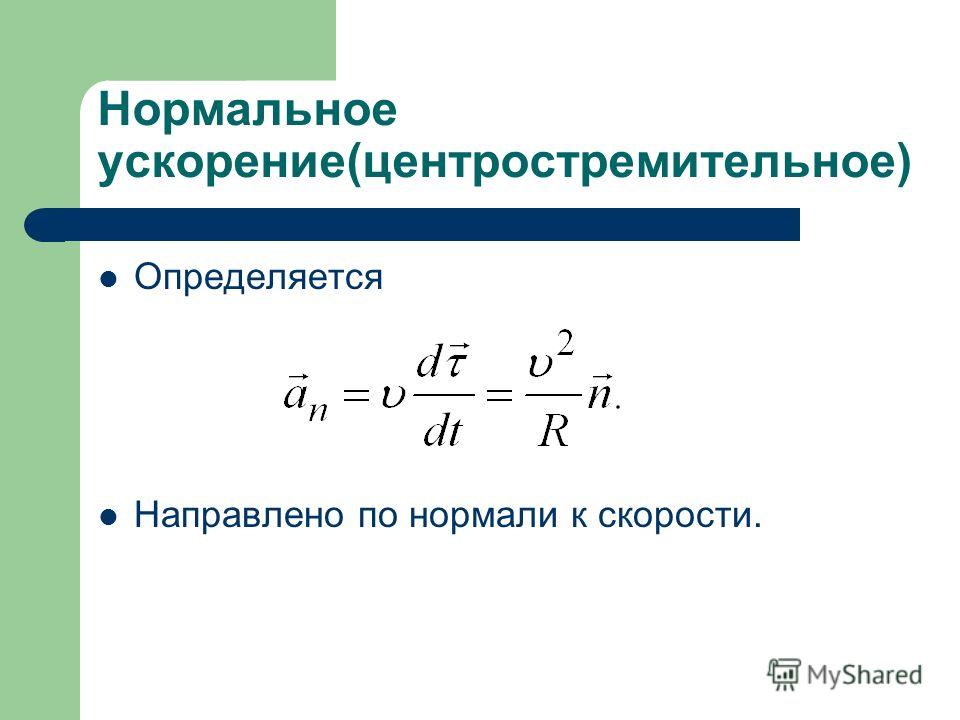
Двумерное движение (в плоскости).
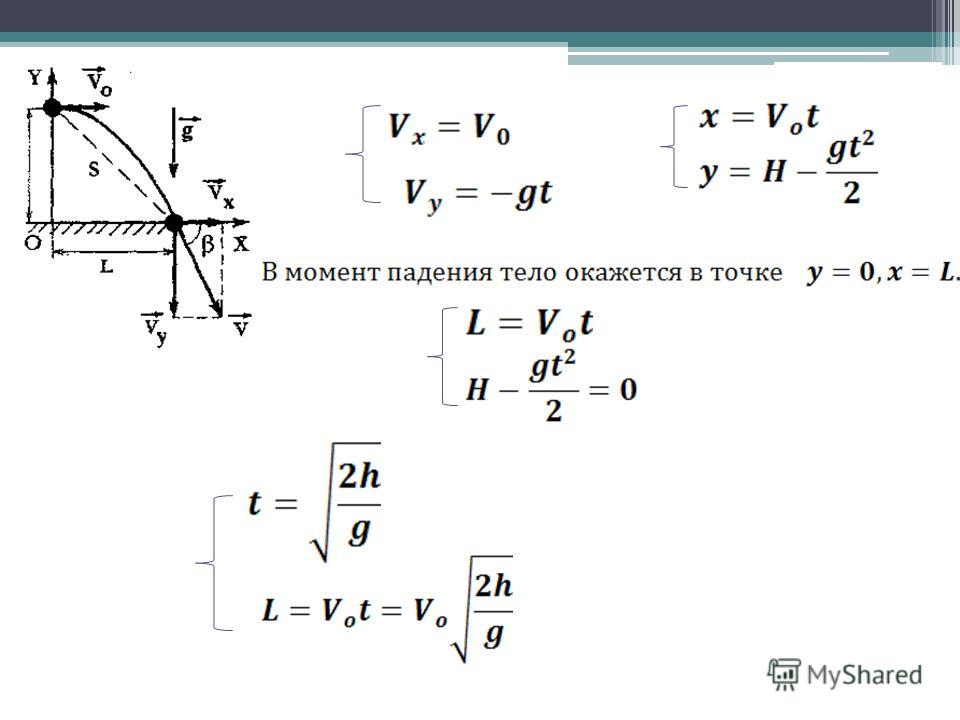
Galileo расширил кинематику на случаи падения тел и снарядов (ядер). Для этого он представил инновационную концепцию. Он предположил, что движение снаряда можно рассматривать как комбинацию двух более простых движений, объединенных «принципом суперпозиции». Это так.
Предположим, пушка стреляет горизонтально с высокой скалы. Результирующее движение включает поступательное движение и падающее движение.Представим, что мы можем посмотреть на них по отдельности. Если бы пушечное ядро было просто сброшено со скалы без какого-либо прямого (горизонтального) толчка и без толчка вниз, его начальная скорость равна нулю, и уравнение 11 сводится к
Чтобы не усложнять, мы рассматриваем движение, которое должно быть описано в декартовой системе координат, где «x» – горизонтальное расстояние, «y» – вертикальное, а «+» – направленное вниз.
А теперь представьте, что «отключает» движение ядра вниз.Галилей понял, что величина ускорения движущегося тела зависит от угла движения к вертикали, и что в этих условиях горизонтально движущееся тело не ускоряется или не замедляется. Он подробно обсудил это, поскольку это довольно сложный аргумент, учитывая, что ему пришлось отбросить такие осложнения, как сопротивление воздуха, трение и т. Д. Итак, Галилей сказал, что такое движение, строго горизонтальное, имеет нулевое ускорение, и, следовательно, уравнение 11 снижается до
Он подробно обсудил это, поскольку это довольно сложный аргумент, учитывая, что ему пришлось отбросить такие осложнения, как сопротивление воздуха, трение и т. Д. Итак, Галилей сказал, что такое движение, строго горизонтальное, имеет нулевое ускорение, и, следовательно, уравнение 11 снижается до
Тело движется вперед на равные расстояния за равное время с постоянной скоростью, равной начальной скорости v o .
Теперь, если и «падение», и «поступательное движение» происходят одновременно, Галилей сказал, что мы можем комбинировать (совмещать) эти два движения, чтобы определить фактическое движение. Просто выберите значение времени, в которое вы хотите знать, где находится пушечное ядро, поместите это синто-уравнения 13 и 14, и вы получите положение тела, выраженное в единицах горизонтального расстояния x от начальной точки, и вертикальное расстояние падения y, измеренное от начальной точки. [Мы выражаем это на языке координатной геометрии Декарта, которая была разработана позже, чем Галилей, но мы видим концептуальную основу, предусмотренную в работах Галилея и других исследователей проблемы движения. Фактически, анализ Галилея предвосхитил важное развитие концепции вектора вектора в математике, которая не была сформулирована полностью и явно не использовалась в физике до 19 века!
Фактически, анализ Галилея предвосхитил важное развитие концепции вектора вектора в математике, которая не была сформулирована полностью и явно не использовалась в физике до 19 века!
Схема показывает, что происходит. Он показывает горизонтальные и вертикальные смещения от начальной точки в левом верхнем углу. Вдоль горизонтальной линии представьте стрелки с хвостами в начальной точке. Показаны их головы. Стрелки вниз представляют смещения от этой горизонтальной линии из-за «падения».Длины отрисовываются с равными интервалами времени и в соответствии с уравнениями 13 и 14. Наложение горизонтальных и вертикальных движений достигается путем добавления вертикальных и горизонтальных смещений для каждого времени, комбинируя стрелки, помещая их лицом к хвосту. строка из двух. Эта строка имеет один «хвост» стрелки в начальной точке и другой «наконечник» стрелки в положении тела в то время. Смещение тела в это время представлено стрелкой (не показана), которая проходит от начальной точки до только что построенной стрелки.
Эта процедура работает правильно даже при стрельбе под другим углом к горизонтали, например, когда пушка стреляет под углом вверх. Эта процедура позволяет проследить траекторию движения тела. Используя разработанные нами уравнения, этот путь будет математической кривой, называемой параболой . В реальном мире необходимо учитывать влияние воздуха, замедляющего движение, что более значимо для больших скоростей.К сожалению, это усложнение потребовало бы анализа с использованием математического анализа.
Сложение вектора.
Показанный нами процесс очень важен для физики, так что мы могли бы взглянуть на него более внимательно. Эти стрелки, которые мы нарисовали, представляют векторов , в частности векторов смещения. Многие величины в физике комбинируются посредством процесса объединения векторов путем сложения векторов процесса помещения «стрелочного» представления векторных величин в цепочку «голова к хвосту». Сумма этих векторов и есть вектор, проведенный от свободного хвоста к свободной голове.
Сумма этих векторов и есть вектор, проведенный от свободного хвоста к свободной голове.
Скаляры и векторы
Скаляр – это физическая величина, определение которой никоим образом не путь зависит от направления в пространстве. Скаляры включают время, массу, объем, температуру, плотность и другие. Размер скалярной величины представлен в виде числа. В физических уравнениях скаляры подчиняются алгебре чисел.
|
Вектор – это физическая величина, зависящая от направления в пространстве. Вектор имеет размер и направление , и оба должны быть задан для уникальной характеристики вектора. К векторам относятся смещение, скорость, ускорение, импульс, угловой момент и другие.
Некоторые векторные величины могут вас удивить. Рассмотрим кусок поверхности.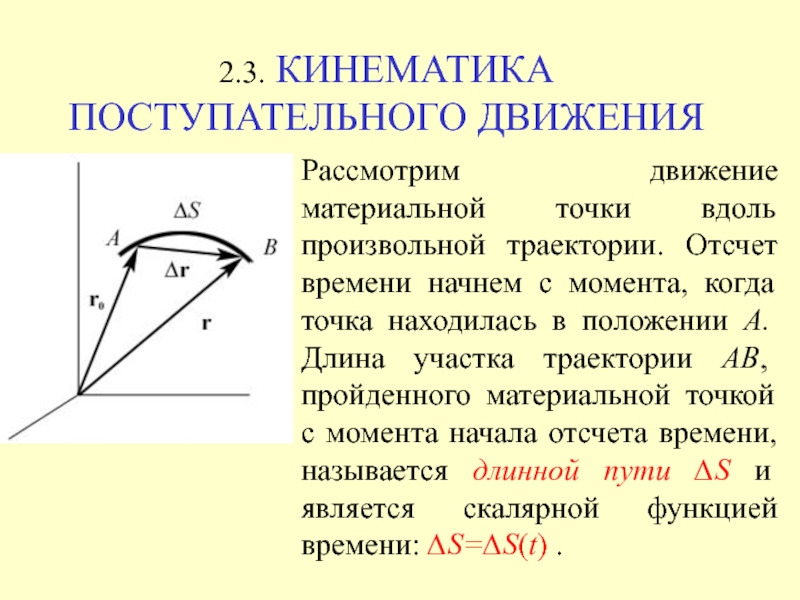 Поскольку площадь поверхности имеет ориентацию в пространстве,
его часто нужно рассматривать как вектор, его направление – это линия, нормальная к поверхности.
Поскольку площадь поверхности имеет ориентацию в пространстве,
его часто нужно рассматривать как вектор, его направление – это линия, нормальная к поверхности.
Направление векторной величины в физике должно быть указано, поскольку оно так же важно, как размер вектора при определении эффекта вектора. Два вектора называются равными , только если их размеры Направления и совпадают. Когда мы пишем A = B , мы говорим, что эти два вектора равны по размеру и направлены в одном направлении. Знак равенства, выделенный жирным шрифтом, говорит нам, что это векторное уравнение. Когда мы пишем A = B, мы говорим, что два вектора равны только по размеру, а знак равенства световых граней представляет только равенство размеров.
Векторы в физических уравнениях подчиняются алгебре, совершенно отличной от
что скалярной алгебры. Одно полезное и интуитивно понятное графическое представление вектора
это стрела. Длина стрелки представляет размер вектора, а длина
Направление стрелки представляет направление вектора в пространстве.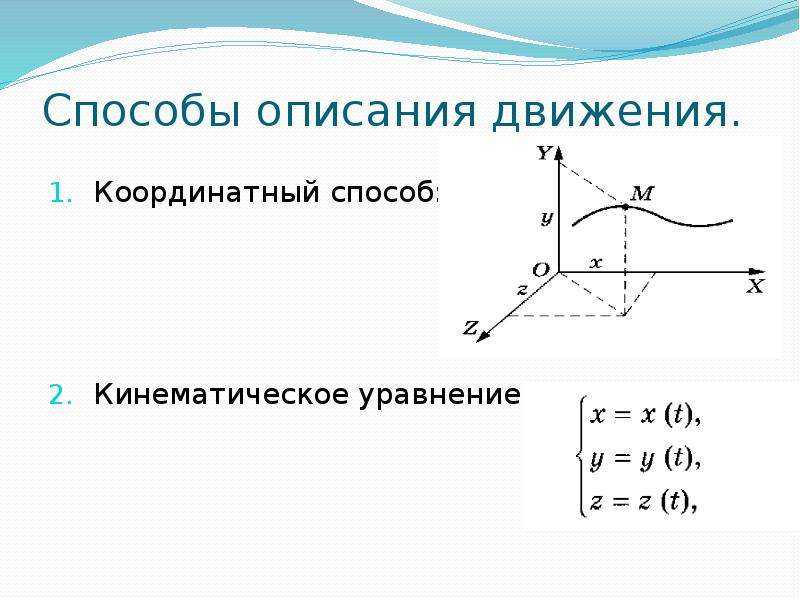 С помощью этого представления мы можем проиллюстрировать отношения между
векторов геометрически, и это облегчает использование геометрии для решения некоторых задач.
С помощью этого представления мы можем проиллюстрировать отношения между
векторов геометрически, и это облегчает использование геометрии для решения некоторых задач.
Размер (или величина ) векторной величины является скаляр, т.е., ряд. Обозначен размер вектора V | В |. (Обратите внимание, что V выделено жирным шрифтом, так как это вектор, но световые скобки “абсолютное значение”, | |, указывают, что вся величина является скаляром. Т.е. берем абсолютное значение вектора, которое дает скалярный результат). мы можем просто написать буквенный символ вектора lightface, чтобы указать, что он представляет только размер вектора.
Сумму двух векторов можно найти, геометрически расположив стрелки, обозначающие векторы «голова к хвосту». Тогда сумма может быть найдено путем рисования нового вектора от свободного хвоста к свободной голове.
Разница между двумя векторами A – B находится сложением
векторы A и −B где −B – вектор
тот же размер, что и B , но противоположный по направлению.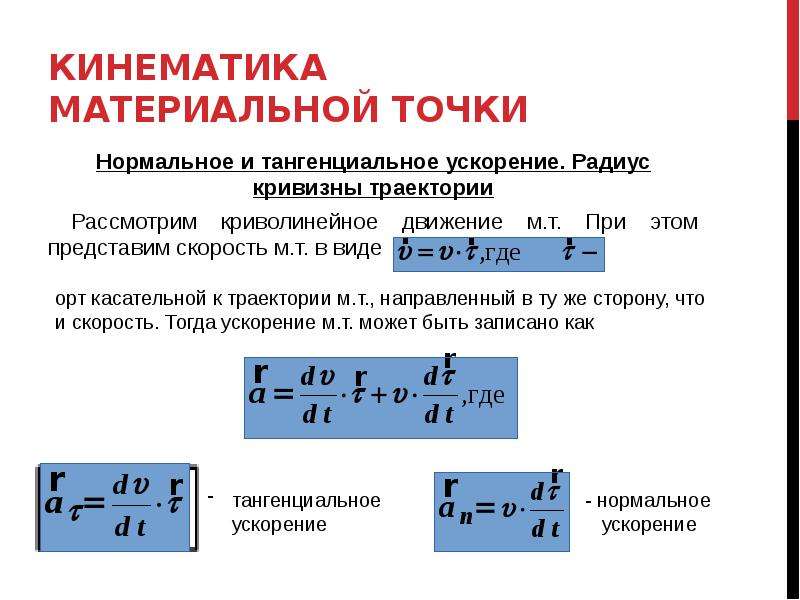
Проекция вектора на линию равна В cosθ , где θ – угол между вектор и линия, а V – это размер вектора. Это может быть найдено геометрически построение линий, перпендикулярных опорной линии и от головы, и хвост вектора. Длина по контрольной линии, лежащей между Строительные линии – это «проекция вектора на эту линию».
|
Компоненты векторов . При работе с векторами алгебраически
вектор полезно представлять его компонентами. Компонент вектора
– проекция этого вектора на выбранную координатную ось.
Компонент вектора обычно рассматривается как скалярная величина.
В то время как ось координат может быть
любая линия, мы обычно используем оси декартовой системы координат,
с указанием компонентов вектора x, y, и z .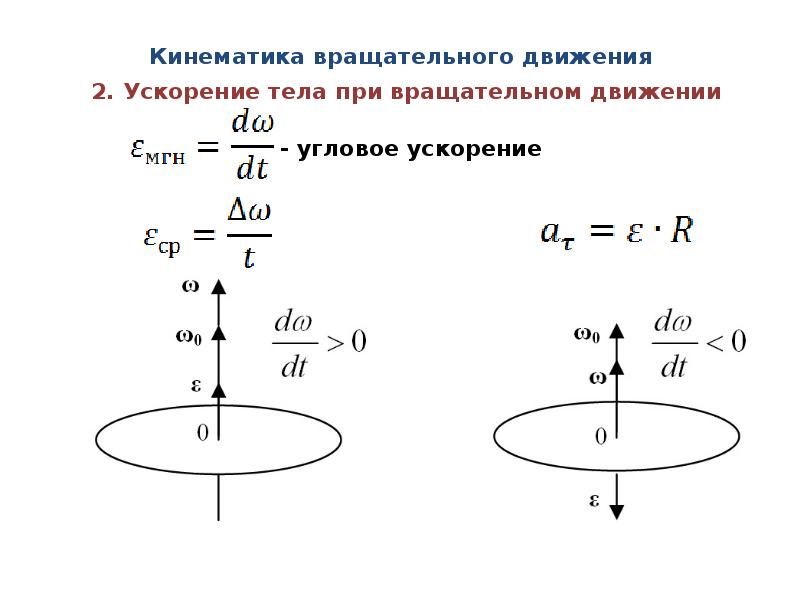 Когда это будет сделано, любой вектор в пространстве однозначно определяется путем указания
оси координат и компоненты вектора вдоль этих осей (x, y, z).
Иногда даже полезно иметь набор координатных осей
которые не являются ортогональными (перпендикулярными), если оси «охватывают пространство»
(способны однозначно представить любой вектор в пространстве его компонентами).
Это требование выполняется, если по трем осям выполняется , а не .
лежат в одной плоскости и никакие два не лежат на одной прямой.
Когда это будет сделано, любой вектор в пространстве однозначно определяется путем указания
оси координат и компоненты вектора вдоль этих осей (x, y, z).
Иногда даже полезно иметь набор координатных осей
которые не являются ортогональными (перпендикулярными), если оси «охватывают пространство»
(способны однозначно представить любой вектор в пространстве его компонентами).
Это требование выполняется, если по трем осям выполняется , а не .
лежат в одной плоскости и никакие два не лежат на одной прямой.
Обычно хвосты векторов не находятся на координатной оси. Отбросьте два перпендикуляра к оси из головы вектора и из его хвоста. Тогда компонент на этой оси – это длина между ножками. этих перпендикуляров. На рисунке показаны лежащие векторы в плоскости x, y, но тот же принцип используется с тремя размерные ситуации.
|

Компоненты векторов – числа со знаком; они могут имеют положительный или отрицательный знак. Вычтите проекцию хвоста значение из значения проекции головы, чтобы получить это число со знаком.
Если компоненты двух векторов равны (x 1 , y 1 , z 1 ) и (x 2 , y 2 , z 2 ), тогда сумма этих трех векторов может быть записана в обозначении компонентов как (x 1 + x 2 , y 1 + y 2 , z 1 + z 2 ).
Произведение вектора и скаляра, V s, является вектором размера | В | с. Он имеет то же направление, что и V .
Два вида векторных произведений полезны в физике, и они будут будут определены позже, когда они нам понадобятся.
Уравнения Галилея в векторной записи.
Как мы видели, векторные величины складываются геометрическим способом, совершенно отличным от того, как складываются обычные числа (скаляры). Два вектора размера 3 и 5 обычно не складываются с вектором размера 8. Мы получаем этот результат только тогда, когда они оказываются в одном направлении. Но этот процесс сложения векторов может быть представлен расширенной алгеброй, включающей векторы и скаляры. Мы отличаем векторы от скаляров, используя жирный шрифт для векторных величин и светлый шрифт для скалярных величин. Когда символ математической операции, такой как «+» или «-», стоит между двумя терминами, которые являются векторами, символы представляют собой сложение и вычитание векторов только что описанного типа.Когда такие операторы стоят между скалярами, они представляют собой обычное скалярное сложение чисел. Две векторные величины равны только тогда, когда равны их размеры и направлений.
Два вектора размера 3 и 5 обычно не складываются с вектором размера 8. Мы получаем этот результат только тогда, когда они оказываются в одном направлении. Но этот процесс сложения векторов может быть представлен расширенной алгеброй, включающей векторы и скаляры. Мы отличаем векторы от скаляров, используя жирный шрифт для векторных величин и светлый шрифт для скалярных величин. Когда символ математической операции, такой как «+» или «-», стоит между двумя терминами, которые являются векторами, символы представляют собой сложение и вычитание векторов только что описанного типа.Когда такие операторы стоят между скалярами, они представляют собой обычное скалярное сложение чисел. Две векторные величины равны только тогда, когда равны их размеры и направлений.
Давайте посмотрим, как это работает, попытавшись преобразовать кинематические уравнения Галилея в векторную нотацию.
Определения:
Скорость: v = (x 2 – x 1 ) / (t 2 – t 1 ), что может быть записано v = Δx / Δt
Ускорение: a = (v 2 – v 1 ) / (t 2 – t 1 ), что может быть записано a = Δv / Δt
Величины Δx и Δv теперь представляют собой векторные перемещения и скорости соответственно.
Как и раньше, мы можем написать выражение для средней скорости в случае, когда вектор ускорения постоянен. Нарисуйте картинку, представляющую уравнения 23 и 24.
|
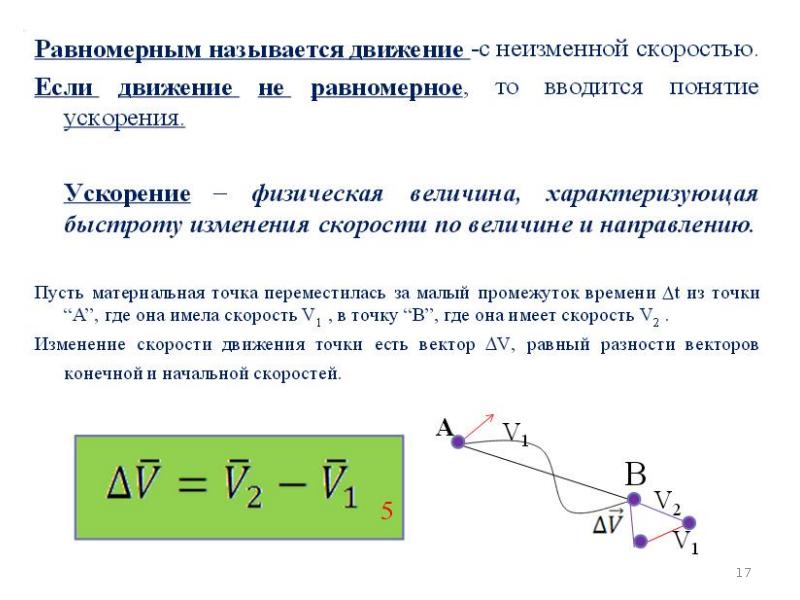 Затем решите уравнение относительно d .
Затем решите уравнение относительно d .
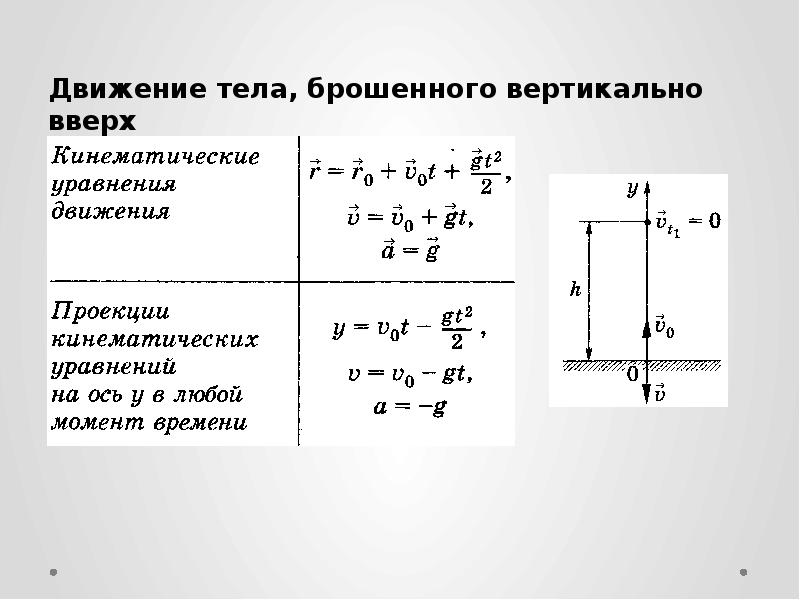
 Такое рассмотрение потребовало бы вычислений, но привело бы к тем же выражениям для импульса, работы, энергии и импульса.
Такое рассмотрение потребовало бы вычислений, но привело бы к тем же выражениям для импульса, работы, энергии и импульса.
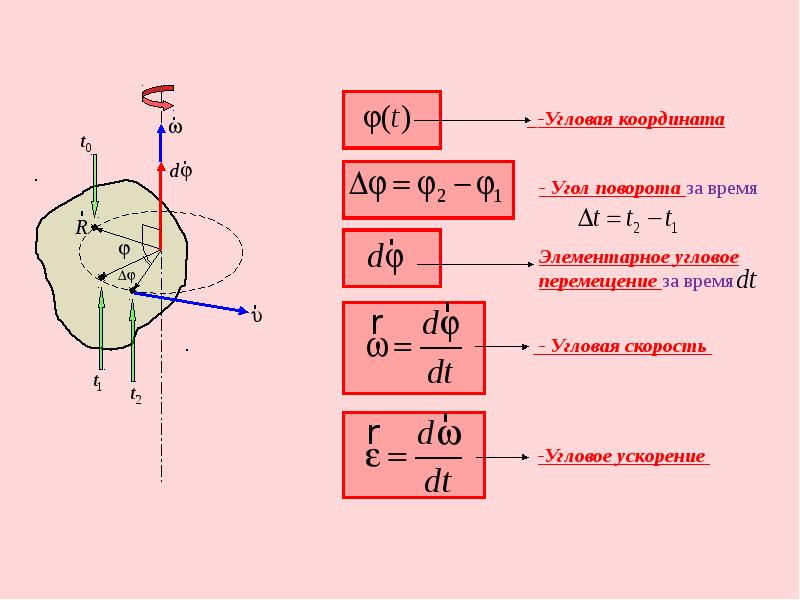 Трение считается «возмущением», замедляющим скорость тела. Но если отбросить такие придирки, Галилей определенно ожидал здесь первого закона Ньютона.
Трение считается «возмущением», замедляющим скорость тела. Но если отбросить такие придирки, Галилей определенно ожидал здесь первого закона Ньютона. Влияния A и B объединяются какой-то математической суммой A + B. Они не объединяются, например, A 2 + B 2 или какой-либо другой сложной математической комбинацией, такой как A + B + 2AB.«Независимость» означает, что одно влияние не изменяет фундаментальную природу другого. Наличие влияния B не меняет уравнение влияния A.
Влияния A и B объединяются какой-то математической суммой A + B. Они не объединяются, например, A 2 + B 2 или какой-либо другой сложной математической комбинацией, такой как A + B + 2AB.«Независимость» означает, что одно влияние не изменяет фундаментальную природу другого. Наличие влияния B не меняет уравнение влияния A.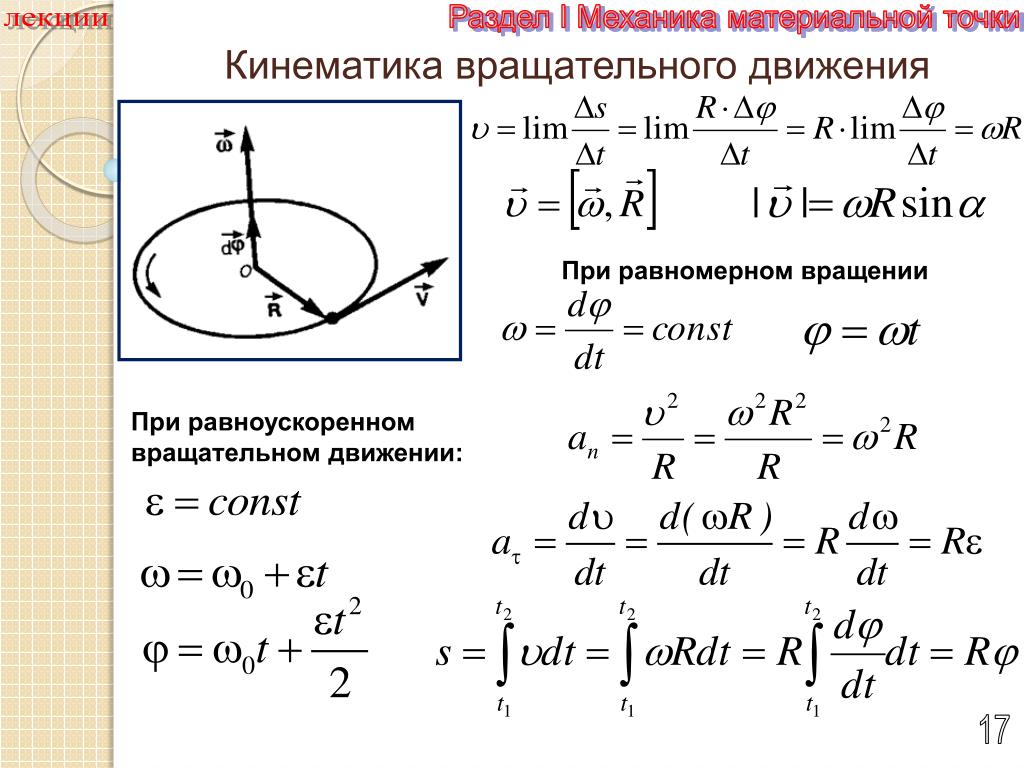 Это описывают два веб-сайта: Oberlin College и San Francisco U. Это объяснение часто плохо описывается в учебниках.Но с принципом наложения это несложно. Перемещение пули представляет собой наложение v o т непосредственно по линии от ружья до исходного положения обезьяны. Обезьяна, почти в тот же момент, когда пуля покидает ружье, падает согласно (1/2) gt 2 . Пуля падает на одинаковое количество за одно и то же время и, следовательно, попадает в обезьяну. Нарисуйте векторы v o t и (1/2) gt 2 лицом к хвосту, чтобы увидеть это. Вы знаете, что эта проблема существует много-много лет, потому что в настоящее время мы не хотим поощрять отстрел обезьян.
Это описывают два веб-сайта: Oberlin College и San Francisco U. Это объяснение часто плохо описывается в учебниках.Но с принципом наложения это несложно. Перемещение пули представляет собой наложение v o т непосредственно по линии от ружья до исходного положения обезьяны. Обезьяна, почти в тот же момент, когда пуля покидает ружье, падает согласно (1/2) gt 2 . Пуля падает на одинаковое количество за одно и то же время и, следовательно, попадает в обезьяну. Нарисуйте векторы v o t и (1/2) gt 2 лицом к хвосту, чтобы увидеть это. Вы знаете, что эта проблема существует много-много лет, потому что в настоящее время мы не хотим поощрять отстрел обезьян.Границы | Уравнения движения свободно плавающих систем космических аппаратов-манипуляторов: Учебное пособие для инженера
Введение
Небольшой космический корабль, оснащенный роботами-манипуляторами, станет основой любого роботизированного обслуживания на орбите, добычи полезных ископаемых на астероидах или активных миссий по удалению космического мусора. Примеры таких миссий более подробно обсуждаются Yoshida (2003), Shoemaker and Wright (2004), Reintsema et al.(2010), Barnhart et al. (2013). Использование установленных на космических кораблях роботизированных систем-манипуляторов для сборки и обслуживания космических кораблей имеет долгую и успешную историю с программами Space Shuttle и Международной космической станции. Орбитальные аппараты “Спейс Шаттл” были оснащены системой дистанционного манипулятора “Шаттл”, в просторечии известной как Canadarm (Sallaberger, 1997). SRMS успешно использовалась для захвата космического телескопа Хаббла и других спутников во время сервисных миссий, для определения местоположения астронавтов во время внекорабельной деятельности, а также для сборки и пополнения запасов МКС (Goodman, 2006; Hale et al., 2011). В настоящее время МКС оснащена двумя системами манипуляторов: системой дистанционного манипулятора космической станции (Stieber et al., 1997), также известной как Canadarm 2 , и системой дистанционного манипулятора японского экспериментального модуля (Sato and Wakabayashi, 2001). Система дистанционного манипулятора космической станции используется для захвата и швартовки транспортных средств H-II Transfer Vehicle (HTV), Dragon и Cygnus , а также для размещения припасов и астронавтов (Dreyer, 2009; Bain, 2010; Ueda et al., 2010). С помощью ловкого манипулятора специального назначения (также называемого Dextre ) в качестве конечного эффекта система дистанционного манипулятора космической станции способна тонко манипулировать (Coleshill et al., 2009). Эта возможность, например, используется в миссии НАСА по роботизированной дозаправке, которая продемонстрировала возможность доступа и дозаправки в типичном спутниковом топливном порту (Cepollina, 2013). Система удаленного манипулятора японского экспериментального модуля в основном используется для обслуживания японского экспериментального модуля Kibo и также оснащена ловким конечным эффектором.Комплект манипуляторов МКС планируется дополнить установкой европейской роботизированной руки на российском модуле (Patten et al., 2002). Использование манипуляторов-манипуляторов, установленных на небольших обслуживающих космических аппаратах, для захвата и управления клиентским спутником было успешно продемонстрировано с помощью миссий Engineering Test Satellite VII (ETS-VII) и Orbital Express (Yoshida, 2003; Kennedy, 2008). Предстоящие демонстрационные миссии по обслуживанию на орбите Restore-L и роботизированное обслуживание геостационарных спутников также будут включать роботов-манипуляторов в качестве основного компонента системы захвата и обслуживания (Reed et al., 2016; Roesler et al., 2017).
Работа с роботом-манипулятором на космическом корабле приводит к созданию сложной системы, перекрывающей дисциплины робототехники и аэрокосмической техники. Поскольку динамика между манипулятором и базовым космическим кораблем взаимосвязана, системе требуется интегрированная система управления для достижения целей захвата или манипулирования и обеспечения успеха миссии. Более того, сложная динамика системы космический аппарат-манипулятор должна быть учтена при планировании маневра и в общей временной шкале его маневра.Влияние операций манипулятора на ориентацию и положение орбитального корабля “Шаттл” и МКС было незначительным, и им можно было управлять с помощью оперативных процедур (Sargent, 1984). Для быстро движущихся манипуляторов, установленных на небольших базовых космических аппаратах, нарушения положения и ориентации из-за движения манипулятора становятся критическими, как показано на ETS-VII и Orbital Express (Oda, 2000; Kennedy, 2008). Следовательно, инженеры, разрабатывающие систему управления космическим кораблем, определяющие используемые сенсорные системы, разрабатывающие систему связи и разрабатывающие план операций, должны иметь представление о сложной динамике, возникающей в системе множества тел.Однако многотельная динамика и моделирование роботизированных систем не входят в типичную учебную программу бакалавриата по аэрокосмической инженерии и редко рассматриваются в программах для выпускников аэрокосмической инженерии. Поэтому аэрокосмические инженеры должны использовать академическую литературу, чтобы восполнить этот пробел в знаниях. В доступной литературе основное внимание уделяется применению и анализу характеристик различных подходов к описанию совместной динамики системы космический аппарат-манипулятор (Moosavian and Papadopulos, 2007; Flores-Abad et al., 2014), но не дает полного описания подхода к моделированию, который позволил бы аэрокосмическому инженеру получить доступ к теме, не обращаясь к исследовательским публикациям и учебникам.
Существует два общих метода моделирования динамики и вывода уравнений движения многотельных систем: рекурсивный метод Ньютона-Эйлера и метод Лагранжа. Общее описание метода Ньютона-Эйлера дано в Siciliano et al. (2010). Стоункинг (2007) предоставляет подробное описание использования динамики Ньютона-Эйлера для разработки уравнений движения для многотельного космического корабля.Приложения в области динамики космических аппаратов-манипуляторов показаны в Longman et al. (1987) и Мукерджи и Накамура (1992). В методе Ньютона-Эйлера уравнения движения многотельной системы вычисляются из равновесия сил и моментов, действующих на каждое звено системы. Исходя из этого, можно разработать рекурсивный алгоритм. При прямой рекурсии через структуру многотельной системы вычисляются линейные и угловые ускорения и скорости звеньев. Силы и моменты, действующие на звенья, затем вычисляются в обратной рекурсии.Для разработки уравнений движения системы гибких звеньев был разработан метод прямого пути (Ho, 1977; Hughes, 1979). В методе прямого пути точка отсчета уравнений движения перемещается от центра масс системы к фиксированной точке в одном из тел, который обычно выбирается в качестве центра масс основания. космический корабль. Затем описывается структура системы по самому прямому пути через ссылки. Крутящие моменты, действующие на звенья, принимаются относительно шарниров, а не центров масс звеньев, тем самым устраняя силы ограничения и крутящие моменты между звеньями.
Метод Лагранжа развивает уравнения движения многотельной системы на основе ее кинетической и потенциальной энергий, используя набор обобщенных координат, описывающих положения звеньев (Siciliano et al., 2010). Следуя Siciliano et al. (2010), метод Лагранжа выгоден тем, что он систематичен и легко понятен, а также предоставляет уравнения движения в компактной аналитической форме, облегчающей проектирование систем управления. Основным преимуществом подхода Ньютона-Эйлера является его вычислительная эффективность как рекурсивного алгоритма.Таким образом, метод Лагранжа используется для объяснения развития уравнений движения в настоящей статье из-за его систематического характера.
При управлении движением системы космический аппарат-манипулятор становится проблемой динамическое соединение базового космического аппарата и манипулятора. Поскольку базовый космический аппарат находится в одном из пяти режимов маневрирования, описанных в разделе «Подробная классификация маневрирования системы космического корабля-манипулятора», и, следовательно, не зафиксирован в космосе, любое движение манипулятора вызовет вращение и перемещение базового космического корабля.Исчерпывающий обзор методов учета динамической связи при управлении положением и ориентацией как рабочего органа манипулятора, так и базового космического корабля представлен в Flores-Abad et al. (2014). Здесь будут выделены три из этих методов: подход виртуального манипулятора (VM), подход динамически эквивалентного манипулятора (DEM) и подход обобщенной матрицы Якоби (GJM). Подход VM заменяет физическую систему космического корабля-манипулятора динамически согласованной системой VM (Vafa and Dubowsky, 1987).Основание ВМ представляет собой сферический шарнир, расположенный в центре масс физической системы космический аппарат-манипулятор. Ориентация этого сочленения равна ориентации космического корабля-базы в инерциальном пространстве. Поскольку в отсутствие внешних сил центр масс системы остается неподвижным, сложная свободно плавающая система заменяется динамически согласованной системой с фиксированным основанием. VM представляет собой чисто кинематическую вычислительную модель в том смысле, что это безмассовая кинематическая цепочка с постоянными размерами, рассчитанными на основе геометрии и массовых свойств системы космический аппарат-манипулятор.Обычно он используется для анализа рабочего пространства для систем плавучих космических аппаратов-манипуляторов (Вафа и Дубовски, 1987; Дубовски и Пападопулос, 1993). В частности, виртуальная машина не может быть представлена физическим манипулятором. Однако этого можно достичь с помощью метода DEM (Liang et al., 1998). Базовое соединение DEM также является сферическим шарниром в центре масс системы, и DEM геометрически идентична VM для той же системы космического корабля-манипулятора. В отличие от VM, звенья DEM имеют матрицы масс и моментов инерции, которые вычисляются из массовых распределений реальной системы.Таким образом, модель расчета DEM может быть воспроизведена в реальной механической системе и, таким образом, использована в экспериментальных системах.
Обобщенный якобианский подход был первоначально предложен Йошидой и Уметани (1993), расширяя динамический анализ, ранее введенный Дубовски и Пападопулосом (1993) и в диссертации Пападопулоса (1990). Обобщенный якобианский подход успешно использовался при проведении моделирования и разработке алгоритмов управления для демонстрационной миссии ETS-VII (Yoshida, 2003).Этот подход был также обобщен, чтобы служить в качестве описания любой недостаточно задействованной системы манипулятора (Yoshida and Nenchev, 1998). Обобщенный метод Якобиана лег в основу разработки алгоритмов неголономного планирования пути (Nakamura, Mukherjee, 1989; Xu et al., 2008), алгоритмов захвата цели (Yoshida, Nakanishi, 2003), стратегий управления космическими аппаратами-манипуляторами (Marchesi , 1997; Caccavale and Siciliano, 2001; Aghili, 2009), аппаратное моделирование космических робототехнических систем (Wei et al., 2006), алгоритмы управления реакционным нулевым пространством (Ненчев и др., 1999) и модели контактной динамики (Ненчев, Йошида, 1999). Метод полезен для символического аналитического описания динамики сложной системы космический аппарат-манипулятор, что важно для синтеза законов наведения и управления, а также для руководства при выборе систем датчиков операций приближения и конструкции механизмов наведения. для антенн, солнечных батарей и т. д.
Несмотря на широкое использование подхода GJM, полное описание расчета всех инерционных параметров системы космический аппарат-манипулятор для общего случая пространственного манипулятора N , установленного на шести градусах, в литературе отсутствует. Базовый космический корабль свободы (DOF).Однако это критично для его использования в конструкции базового космического корабля, а также в общей системе сближения и захвата и миссии. Настоящая статья направлена на восполнение этого значительного пробела путем представления полного символического, пошагового вывода связанных уравнений движения системы космический аппарат-манипулятор в соответствии с подходом GJM, включая производные по времени и совместному углу обобщенной матрицы инерции. В представленном здесь руководстве используется метод Лагранжа для одиночного манипулятора, установленного на базовом космическом корабле, в предположении нулевого линейного и углового моментов, что делает его применимым к описанию большинства современных систем космического корабля-манипулятора.Кинематика системы космический аппарат-манипулятор описывается как матрицами направляющих косинусов, так и кватернионами. Для распространения этого подхода на системы с несколькими манипуляторами читателя отсылаем к работе Моосавиана и Пападопулоса (2004), а уравнения движения системы космический аппарат-манипулятор с ненулевым угловым моментом рассматриваются в статье Наноса и Пападопулоса (2011). . Это полное обсуждение подхода GJM позволяет вычислить символические выражения уравнений движения системы космический аппарат-манипулятор, которые затем могут быть использованы для формулировки законов наведения и управления в дополнение к численному моделированию.
Вторым важным вкладом статьи является введение новой, более точной и подробной категоризации для режимов управления космическим аппаратом-манипулятором. В частности, две часто используемые категории (свободно летающие и свободно плавающие) расширены за счет введения пяти категорий (а именно: плавающий, вращающийся-плавающий, вращающийся-летающий, поступательно-летающий и летающий).
Третьим вкладом статьи является определение обобщенного якобиана для произвольной точки системы космический аппарат-манипулятор, который полезен для наведения и управления, предотвращения препятствий, а также обнаружения и моделирования столкновений.
Насколько известно авторам, это первый случай, когда обобщенный якобианский подход выводится во всей полноте на основе многочисленных ссылок в литературе и собственных исследований авторов. Таким образом, документ представляет собой ценный ресурс для аэрокосмических инженеров, позволяющий понять и смоделировать сложную динамику робота-манипулятора, работающего на космическом корабле.
Работа организована следующим образом. В разделе «Детальная классификация маневров системы космический аппарат-манипулятор» дана подробная классификация режимов маневрирования системы космический аппарат-манипулятор.В разделе «Кинематика системы космический аппарат-манипулятор» разрабатываются выражения для кинематики системы «космический аппарат-манипулятор» на основе адаптированной версии параметров Денавита-Хартенберга. Используя эти выражения, динамика системы плавучего космического корабля-манипулятора описана в разделе «Динамика системы плавучего космического корабля-манипулятора». В статье развивается обобщенная форма уравнений движения системы плавучего космического аппарата-манипулятора из раздела «Обобщенная форма уравнений движения для системы плавающий космический аппарат-манипулятор», за которым следует обобщенная форма типичных якобианов космического аппарата. система манипулятора в разделе Обобщенный якобиан.В разделе «Реализация имитационной модели для системы плавучего космического корабля-манипулятора» обсуждаются варианты реализации компьютерной имитационной модели на основе обобщенного подхода. Результаты моделирования представлены в разделе «Численное моделирование». Наконец, в разделе «Заключение» представлены заключительные замечания.
Детальная классификация маневров системы космических аппаратов-манипуляторов
Система космического корабля-манипулятора может маневрировать в различных режимах, обычно обозначаемых терминами свободно плавающий и свободно летающий (Уметани и Йошида, 1989; Дубовски и Пападопулос, 1993).Для получения более детальной и полной классификации режимов маневрирования космических аппаратов авторы предлагают добавить три режима, полностью покрывающих все возможные маневры космических аппаратов (см. Таблицу 1). Новые режимы определены для изолированной системы космический аппарат-манипулятор, работающей в чистой невесомости и отсутствии трения.
Таблица 1 . Классификация режимов маневрирования изолированной системы космический аппарат-манипулятор.
Сохранение линейного и углового момента
Случаи маневрирования, определенные здесь как плавающий и вращающийся-плавающий , в предыдущей литературе назывались свободно плавающим .В обоих случаях полный линейный момент и полный момент количества движения космического аппарата-манипулятора не подвержены никаким внешним управляющим силам или моментам и, таким образом, сохраняются.
Плавающий
Система космического корабля-манипулятора здесь определяется как , плавающая при маневрировании в режиме недостаточного срабатывания шести степеней свободы, в котором активно управляются только сочленения манипулятора. Система движется только под действием внутренних реакций за счет срабатывания совместных двигателей манипулятора.Поскольку роботы-манипуляторы, установленные на космических аппаратах, обычно используют только поворотные шарниры, эти внутренние реакции обычно являются крутящими моментами. Следовательно, 3 степени свободы ориентации космического корабля-основы и 3 степени свободы перемещения центра масс системы активно не контролируются.
Вращение-Плавающий
Система космического корабля-манипулятора здесь определяется как вращательно-плавающий при маневрировании в режиме с недостаточной активизацией 3 степеней свободы, в котором как степень свободы в суставах манипулятора, так и три степени свободы ориентации базового космического корабля управляются посредством только внутренние моменты.Таким образом, вариант маневра вращательно-плавающего действия отличается от плавания тем, что положение базового космического корабля активно контролируется устройствами обмена импульсом [то есть реактивными колесами или гироскопами управляющего момента (Hughes, 2004)]. Три степени свободы перемещения центра масс системы активно не контролируются.
Управляемый линейный и угловой момент
Все три случая маневрирования, которые здесь определены как вращение-полет, поступательное движение и полет , были определены в предыдущей литературе как свободно летающий .Во всех трех случаях полный угловой момент, полный линейный момент или и то и другое активно контролируются внешними силами и / или крутящими моментами, например, системой управления реакцией.
Вращение-Полет
Система космический аппарат-манипулятор здесь определяется как вращение-полет , когда глубина резкости в суставах манипулятора активно контролируется крутящими моментами двигателя суставов, а три степени свободы ориентации космического корабля-основы активно управляются только внешними крутящими моментами. Обычно это достигается с помощью реактивных двигателей, работающих парами, таким образом создавая чистый крутящий момент с полной нулевой силой.Три степени свободы перемещения центра масс системы активно не контролируются. Следовательно, в этом случае полный линейный момент системы постоянен, в то время как угловой момент изменяется во времени.
Перевод-Летающий
Система космического корабля-манипулятора здесь определяется как поступательно-летающий , когда активно контролируются как степень свободы в суставах манипулятора, так и три степени свободы перемещения базового космического корабля. Степень свободы манипулятора регулируется крутящими моментами двигателя шарнира.Перемещение базового космического корабля управляется внешними силами, обычно создаваемыми реактивными двигателями малой тяги. Кроме того, три степени свободы ориентации космического корабля-базы либо не контролируются активно, либо контролируются только устройствами обмена импульсом. Следовательно, полный угловой момент системы в этом случае постоянен, в то время как линейный момент изменяется во времени.
Летающий
Система космического корабля-манипулятора здесь определяется как летает при маневрировании в режиме, в котором все степени свободы в суставах манипулятора активно контролируются крутящими моментами двигателя суставов, а шесть степеней свободы движения базового космического корабля активно контролируются. внешними силами, обычно создаваемыми реактивными двигателями.В этом случае как полный угловой момент системы, так и линейный момент изменяются во времени.
Приведенная выше классификация строго действительна только для изолированной системы космический аппарат-манипулятор. В действительности система космического корабля-манипулятора никогда не бывает изолированной, а вращается вокруг протяженного тела (например, Земли) под действием своего гравитационного притяжения. Однако приведенная выше классификация все еще может использоваться в приблизительном смысле из-за невесомости (например, свободного падения) состояния центра масс системы (из-за уравновешивания гравитационного притяжения и центробежной силы) и пренебрежения эффектом крутящих моментов окружающей среды (обычно преобладают крутящий момент градиента силы тяжести, крутящий момент атмосферы и крутящий момент давления солнечного излучения ) и негравитационные силы окружающей среды (обычно преобладают атмосферное сопротивление и давление солнечного излучения).Анализ и моделирование режимов маневрирования плавающий, вращение-плавающий и вращение-полет обычно можно проводить с хорошей точностью, как если бы система была изолирована. В этих трех случаях система координат с центром в центре масс орбитальной системы космического корабля-манипулятора и с осями, ориентированными фиксированным образом относительно инерциальной системы отсчета (т. Е. Имеющей нулевую абсолютную угловую скорость), может рассматриваться как эквивалент инерциальной системы координат для описания движения системы космический аппарат-манипулятор.
Кинематика космического аппарата-манипулятора
Геометрия базового космического корабля, оборудованного одним манипулятором N -звено, показана на рисунке 1. Базовый космический корабль определяется как звено 0, с соединением 0, находящимся в центре масс базового космического корабля. Концевой эффектор (EE) манипулятора является частью звена N и расположен на конце этого звена. Следовательно, его расположение можно рассматривать как виртуальный стык N + 1 . Геометрия системы космический аппарат-манипулятор относительно начала Ω инерциальной системы отсчета J может быть однозначно описана векторами положения шарниров, p i (0 ≤ i ≤ N + 1), а по векторам положения центров масс звеньев r j (0 ≤ j ≤ N ).В этой статье слово «вектор» строго зарезервировано для векторов Гиббса (см., Например, Hughes, 2004).
Рисунок 1 . Геометрия системы космический аппарат-манипулятор.
В анализе используются три типа декартовых систем координат: инерциальная система координат J, набор из N + 2 совместных фиксированных систем координат Ji (0 ≤ i ≤ N + 1), и набор N + 1 связанных систем координат Li (0 ≤ i ≤ N ), с J0≡L0 и JN + 1 = JEE.i для 1 ≤ i ≤ N . Начало координат ϱ 1 точки J1, а также направления xJ1 и yJ1 могут быть выбраны по мере необходимости для конкретной геометрии. То же верно и для системы координат рабочего органа JN + 1. Кроме того, для 2 ≤ i ≤ N начало координат ϱ i Ji находится на пересечении zJi и общей нормали между zJi-1 и zJi. Когда zJi-1 и zJi параллельны, общая нормаль определяется однозначно и для удобства выбирается ϱ i (например.г., проходящий через центр масс звена и-1 ). Ось xJi направлена от ϱ до вдоль направления общей нормали, определенной выше. Ось yJi завершает правую декартову систему координат. Система координат звена Li параллельна Ji + 1 (для 1 ≤ i ≤ N ), но с началом в центре масс ( CM i ) звена i . Этот способ определения совместных систем координат соответствует Siciliano со следующим отличием: система координат Siciliano link i идентична нашей совместной i + 1 системе координат Ji + 1.Кроме того, истоки систем координат связи Li помещаются в центры масс связи, чтобы соответствовать подходу Йошида (Yoshida and Umetani, 1993).
Геометрическая взаимосвязь между последовательными системами координат Ji и Ji + 1 (1 ≤ i ≤ N ) описывается четырьмя параметрами DH d i , θ i , α i и c i (см. Таблицу 2 и рисунок 2).Для звена с поворотным шарниром θ i является единственным изменяемым параметром и идентичен углу соединения q i . Параметры d i , α i и c i представляют фиксированные геометрические свойства звена манипулятора. Для призматического шарнира параметр d i является переменным и идентичен удлинению шарнира.Поскольку призматические соединения обычно не используются в приложениях орбитальной робототехники, в этой статье рассматриваются только поворотные соединения.
Таблица 2 . Параметры Денавита-Хартенберга и их геометрический смысл.
Рисунок 2 . Индивидуальные кинематические параметры Денавита-Хартенберга.
Матрица однородного преобразования JiTJi + 1 из mathcalJ i в координаты Ji + 1 может быть выражена как функция параметров DH следующим образом:
JiTJi + 1 = A (θi, di, αi, ci), (1), где матричная функция преобразования DH A (β, u , γ, w ) определяется как:
A (β, u, γ, w) ≜ [cos β− sin β cos γ sin β sin γw cos β sin β cos β cos γ− cos β sin γw sin β0 sin γ cos γu0001].(2)Следовательно, положение и ориентация каждой совместной системы координат Ji (2 ≤ i ≤ N + 1) могут быть рекурсивно выражены посредством произведения матриц преобразования DH. Результирующая матрица однородного преобразования JTJi содержит матрицу направленного косинуса (DCM) JRJi и вектор положения Jpi:
JTJ i = [JRJi Jpi01,31], (3)Аналогично, матрица однородного преобразования JTLi содержит DCM JRLi и позицию Jri. Примечательно, что из-за того, что Ли ориентирован как Ji + 1, он дает:
JRLi = JRJi + 1.я = JRJi (001). (5)Кроме того, полезно определить следующие дополнительные векторы. Вектор положения a i соединяет начало координат ϱ i шарнирной системы координат i Ji с центром масс звена i (CM i , начало звена i система координат Li). Вектор положения b i соединяет CM i и ϱ i +1 .Примечательно, что если CM i лежит на прямой линии, соединяющей ϱ i и ϱ i +1 , что является допустимым предположением для большинства распространенных манипуляторов космических аппаратов, a i и b i могут быть заменены их скалярными компонентами a i и b i на оси x Li и J929 оси Li + 1.
Примечательно, что поскольку базовый космический корабль обозначен как звено 0, а его центр масс совмещен с 0, это r 0 = p 0 , L0 = J0, JRL0 = JRJ0, и JTL0 = JTJ0. В частности, мы решили выразить DCM для базового космического корабля в углах Эйлера (угол крена ϕ, угол тангажа θ, угол рыскания ψ) в следующей последовательности вращения 1-2-3:
JRL0 = JRJ0 = [cos ψ− sin ψ0 sin ψ cos ψ0001] [cos θ0 sin θ010− sin θ0 cos θ] [1000 cos ϕ− sin ϕ0 sin ϕ cos ϕ].(6)Следовательно:
JTJ 0 = JTL 0 = [cos ψ cos θ cos ψ sin θ sin ψ− sin ψ cos ψ cos ψ sin θ cos ψ + sin ψ sin ψ sin ψ cos θ sin ψ sin θ sin ψ + cos ψ cos ψ sin ψ sin θ cos ψ− cos ψ sin ψ Ir0− sin θ cos θ sin ψ cos θ cos ψ 0001]. (7)Совместная система координат J1 имеет постоянное положение 0b0 и ориентацию L0RJ1 относительно системы координат базового космического аппарата. Выражая L0RJ1 в углах Эйлера с последовательностью 1-2-3 (ϵ, ζ и η), получаем:
JTJ 1 = JTJ0J 0TJ1 == JTJ 0 [cos η cos ζ cos η sin ζ sin ϵ− sin η cos ϵ cos η sin ζ cos ϵ + sin η sin ϵ sin η cos ζ sin η sin ζ sin ϵ + cos η cos sin η sin ζ cos ϵ− cos η sin ϵ 0b0− sin ζ cos ζ sin ϵ cos ζ cos ϵ 0001].(8)Для всех последующих совместных систем координат Ji с учетом уравнения (1) получается:
JTJ i = JTJ i − 1Ji − 1TJi = JTJ i − 1A (qi − 1, di − 1, αi − 1, ai − 1 + bi − 1), ∀ {2≤i≤N}, (9), где матрицы преобразования для систем координат звена, ITLi, выводятся как:
JTL i = JTJ i J iTLi = JTJ iA (qi, di, αi, ai), ∀ {1≤i≤N}. k × (Jxi − Jpk)] q.kq˙k). (16)Обозначение a × используется для обозначения кососимметричной матрицы (Hughes, 2004), связанной с любым вектором a , так что векторное произведение c = a × b может быть выражено операцией матрица-вектор c = a × b :
a × = [0-azayaz0-ax-ayax0]. (17)Альтернативное выражение преобразований с использованием кватерниона единиц вместо DCM
Использование DCM при разработке матриц преобразования для системы космический аппарат-манипулятор знакомо и интуитивно понятно.DCM, или, что эквивалентно, матрицы вращения, предлагают уникальную параметризацию ориентации без сингулярностей. Таким образом, метод DCM используется выше для описания формализма DH, а нотации на основе DCM используются в этой статье. Однако параметризация вращения с использованием трех параметров, например, комбинаций углов Эйлера, создает сингулярности, что делает результирующий DCM необратимым. Кроме того, умножение матриц преобразования приводит к большому количеству операций: 27 для двух матриц вращения [3 × 3] и 64 для двух матриц однородного преобразования [4 × 4], что делает подход вычислительно неэффективным.под любым углом α можно записать как четырехвектор:
q¯ = [εη] = [ε1ε2ε3η] = [u1 sin (α / 2) u2 sin (α / 2) u3 sin (α / 2) cos (α / 2)]. (18)Величина q¯ равна | q¯ | = 1, поэтому q¯ называется единичным кватернионом. Таким образом, единичный кватернион соответствует матрице вращения R (Hughes, 2004):
R = [1−2 (ε22 + ε32) 2 (ε1ε2 − ε3η) 2 (ε1ε3 + ε2η) 2 (ε1ε2 + ε3η) 1−2 (ε12 + ε32) 2 (ε2ε3 − ε1η) 2 (ε1ε3 − ε2η) 2 (ε2ε3 + ε1η) 1−2 (ε12 + ε22)]. (19)Последовательность вращений, R 3 = R 1 R 2 , затем выражается кватернионным произведением (Campa and Camarillo, 2008):
q¯3 = q¯1⊗q¯2 = [η1ε2 + η2ε1 + ε1 × ε2η1η2 − ε1Tε2].(20)Следовательно, любой вектор a , выраженный как четырехвектор a = [a1a2a30] T, можно повернуть с помощью единичного кватерниона (Kuipers, 2000):
a ′ = q¯⊗a⊗q¯ *, (21)с сопряженным кватернионом q¯ * = – [εTη] T. Следовательно, применение соглашения DH приводит к единичному кватерниону Jiq¯rJi + 1 для вращения между системами координат Ji и Ji + 1 и к четырехвекторному JitJi + 1 для перемещения между началом координат Ji и Ji + 1 ( Campa and Camarillo, 2008):
. Jiq¯r Ji + 1 = [cos θi2 sin αi2 sin θi2 cos αi2 cos θi2 cos αi2], (22) JitJi + 1 = [ci cos θici sin θidi0].(23)Таким образом, вращение от базового шарнира J1 до рабочего органа JN + 1 может быть вычислено из последовательности вращений с использованием уравнения (20):
1q¯r E = 1q¯r N + 1 = 1q¯r 2⊗2q¯r 3⊗… ⊗N − 1q¯r N⊗ Nq¯r N + 1. (24)Последовательность переводов получается из Уравнения (21):
1tE = 1tN + 1 = 1t2 + + 1q¯r 2⊗2t3⊗1q¯r2 * + + (1q¯r 2⊗2q¯r 3) ⊗3t4⊗ (1q¯r 2⊗2q¯r 3) * +… + + (1q¯r 2⊗… ⊗N − 1q¯r N) ⊗NtN + 1 ⊗ (1q¯r 2⊗… ⊗N − 1q¯r N) *.(25)Динамика системы плавучего космического аппарата-манипулятора
Уравнения движения системы космический аппарат-манипулятор, показанные на рисунке 1, здесь выведены с использованием лагранжевого подхода для случая плавающего режима маневрирования (см. Раздел «Подробная классификация маневрирования системы космический корабль-манипулятор» и таблицу 1). В этом случае потенциальная энергия системы равна нулю, а лагранжиан равен кинетической энергии T :
L = T = 12∑i = 0N (Jωi TJIi Jωi + mi Jr.я TJr.i). (26)Путем сбора данных о массе и инерционных свойствах системы космический аппарат-манипулятор в матрицу инерции [6 × 6] базового космического аппарата H 0 , матрица инерции манипулятора [ N × N ] H m и матрица инерции динамической связи [6 × N ] H 0m , после некоторых алгебраических шагов кинетическая энергия может быть выражена как (Йошида и Уметани, 1993):
T = 12 [Jx˙0Tq˙T] [H0H0mH0mTHm] [Jx.0q.] = 12Jx.0TH0 Jx.0 + 12q˙THmq˙ + 12Jx˙0TH0mq˙ + 12q.TH0mT Jx.0, (27), где Jx.0 = [Jv0 T Jω0T] T – матрица комбинированной и угловой скорости космического корабля-базы. Матрица инерции базового космического корабля, матрица инерции манипулятора и матрица инерции динамической связи подробно объясняются в следующих подразделах.
Матрица инерции базового космического корабля
Матрица инерции базового космического аппарата [6 × 6] H 0 в результате будет иметь вид:
H0 = [mtot 𝕀3,3 − mtot Jr0C × mtot Jr0C × HS], (28), где 𝕀 3, 3 – единичная матрица [3 × 3], а подматрица [3 × 3] H S собирает моменты инерции системы космический аппарат-манипулятор. о центре масс базового космического корабля, выраженном в инерциальной системе отсчета J:
HS = ∑i = 1N (JIi − mi Jr0i × Jr0i ×) + JI0.(29)Матрица моментов инерции i -го звена в инерциальной системе координат получается из матрицы моментов инерции в системе координат i -го звена как:
JIi = JRLi LiIi JRLiT. (30)Матрица инерции динамической связи
Матрица инерции динамической связи [6 × N ] H 0m выражает вклад динамической связи между манипулятором и базовым космическим кораблем в кинетическую энергию системы космический аппарат-манипулятор.В частности, это:
H0m = [JTSHSq], (31), где подматрица [3 × N ] J TS собирает вклад в кинетическую энергию системы от комбинации эффекта совместной скорости манипулятора q˙ и линейной скорости Jv0 базового космического аппарата. Подробно это:
JTS = ∑i = 1N (miJTi), (32), где матрица [3 × N ] J Ti представляет якобиан линейной скорости для центра масс i -го звена (Siciliano et al.i × (Jri-Jpi) 03, N-i], ∀ (1≤i≤N). (33)
Наконец, подматрица [3 × N ] H Sq содержит вклад в кинетическую энергию системы от комбинации эффекта совместной скорости манипулятора q˙ и угловой скорости базового космического корабля. Jω0. Подробно это:
HSq = ∑i = 1N (JIiJRi + mi Jr0i × JTi), (34), где матрица [3 × N ] J Ri представляет якобиан угловой скорости для i -го звена (Siciliano et al.i03, N − i], ∀ (1≤i≤N). (35)
Матрица инерции манипулятора
Матрица инерции [ N × N ] для манипулятора, H м , идентична матрице любого манипулятора с фиксированным основанием (Siciliano et al., 2010) и выражается как:
Hm = ∑i = 1N (JRiT JIiJRi + miJTiTJTi). (36)Уравнения движения плавающего космического аппарата-манипулятора
В качестве обобщенных координат для описания системы космический аппарат-манипулятор были выбраны углы сочленения манипулятора q и комбинированное линейное и угловое положение базового космического корабля Jx0, в результате чего получены следующие два матричных уравнения Лагранжа.В дальнейшем для удобства чтения надстрочный индекс системы координат будет опускаться:
ddt (∂T∂x˙0) −∂T∂x0 = 06,1, (37) ddt (∂T∂q˙) −∂T∂q = τ, (38), где матрица [ N × 1] τ содержит крутящие моменты суставов манипулятора. Можно было бы включить эффекты внутренних крутящих моментов из-за наличия устройств обмена импульсом в правую часть уравнения (37), следуя процедуре, изложенной в Wie (2008). Это расширило бы анализ на случай вращение-плавающий (см. Таблицу 1).
Подставляя кинетическую энергию, выраженную в уравнении (27), в уравнения (37) и (38), вычисляя производные и правильно переставляя члены, матричные уравнения движения (соответствующие N + 6 скаляр уравнения) для системы плавучего космического аппарата-манипулятора получаем:
[H0H0mH0mTHm] [x..0q ..] + [H.0H.0mH.0mTH.m] [x.0q.] + [C0cm] = [06,1τ], (39), где матрица [6 × 1] c 0 и матрица [ N × 1] c m определены как:
c0 = −∂T∂x0 = −12∂∂x0 (x.0TH0x.0 + q.THmq. + X.0TH0mq. + Q.TH0mTx.0), (40) см = −∂T∂q = −12∂∂q (x.0TH0x.0 + q.THmq. + x.0TH0mq. + q.TH0mTx.0). (41)Обобщенная форма уравнений движения для системы плавучего космического аппарата-манипулятора
Уравнения движения в уравнении (39) управляют динамикой системы плавучего космического корабля-манипулятора в терминах связанного движения базового космического корабля (первые шесть скалярных уравнений) и движения манипулятора (последние скалярные уравнения N ). В этом разделе скалярные уравнения движения N + 6 переписываются в набор обобщенных скалярных уравнений N , как это обычно делается для недостаточно задействованных систем (Yoshida and Nenchev, 1998).Момент импульса P и угловой момент L даны по формуле (Umetani and Yoshida, 1989):
[PL] = H0x.0 + H0mq. = M0, (42), где M0 = [PL] T – [61] комбинированная матрица начального линейного и углового момента относительно центра масс базового космического корабля, выраженная в инерциальной системе координат J. Из-за гипотезы плавающего маневрирования при отсутствии любых внешних сил или моментов, положение центра масс системы остается постоянным, импульсы сохраняются, и, следовательно, дает:
ddt (PL) = H0x..0 + H0mq .. + H.0x.0 + H.0mq. = 0. (43)Уравнение (42) решается относительно x˙0. Результат вставляется в уравнение (43), которое затем решается относительно x¨0. Результирующие выражения, наконец, вставляются в последние N скалярных уравнений уравнения (39). Учитывая симметрию H0-1 (которая будет обсуждаться ниже), результирующее матричное уравнение (соответствующее N скалярным уравнениям) будет:
H⋆q .. + H · ⋆q˙ − 12∂∂q (q.TH⋆q.) = Τ − ddt (H0mTH0−1) M0 + 12∂∂q (M0TH0 − TM0), (44), где [ N × N ] обобщенная матрица инерции H ⋆ определяется как:
H⋆ = Hm − H0mTH0−1H0m.(45)Дальнейшее рассмотрение этого обобщенного уравнения движения в присутствии ненулевого углового момента описано в Nanos and Papadopoulos (2011). Для целей этого руководства мы предполагаем, что с этого момента начальный импульс системы плавучего космического корабля-манипулятора равен нулю, то есть:
Следовательно, уравнение (44) упрощается до:
H⋆q .. + H · ⋆q. + C⋆ = τ, (47), где матрица [ N × 1] c ⋆ определяется как:
c⋆ = −12∂∂q (q.TH⋆q.) = – 12q.T∂H⋆∂qq .. (48)Члены, зависящие от скорости и положения в обобщенных уравнениях движения, могут быть объединены в единую матрицу [ N × 1] C ⋆ :
C⋆ (q, q˙) = H .⋆q˙ + c⋆. (49)Это позволяет знакомое представление обобщенных уравнений движения, которое очень похоже на уравнения движения для манипулятора с фиксированным основанием (Siciliano et al., 2010):
H⋆q .. + C⋆ (q, q˙) = τ. (50)Подробное символическое выражение членов уравнения (47) приведено в следующих подразделах.
Обратная матрица инерции базового космического корабля
Для вычисления символьного выражения H ⋆ из уравнения (45) требуется обратная матрица инерции базового космического аппарата [6 × 6] H 0 . Матрица H 0 представляет собой разбитую блочную матрицу вида:
H0 = [mtot𝕀3,3 − mtotr0C × mtotr0C × HS] = [UVWX]. (51)Следуя подходу, принятому Мукерджи и Накамура (1992), обратная величина H 0 определяется с использованием формулы обращения Банахевича (Baksalary and Styan, 2002) и дополнения Шура S U неособой подматрицы U :
H0−1 = [𝕀3,3 − U − 1V03,3𝕀3,3] [U − 103,303,3SU − 1] [𝕀3,303,3 − WU − 1𝕀3,3] = [1mtot𝕀3,3 − r0C × SU − 1r0C × r0C × SU − 1SU − 1r0C × SU − 1], (52), где дополнение Шура U для матрицы [UVWX] определяется как Baksalary and Styan (2002):
SU = X − WU − 1V = HS + mtotr0C × r0C ×.(53)Подробно, S U – это симметричная [3 × 3] матрица с элементами:
s1,1 = ∑i = 1N (Ixxi + mi (r0iy2 + r0iz2)) + Ixx0 − mtot (r0Cy2 + r0Cz2), (54) s1,2 = s2,1 = ∑i = 1N (Ixyi − mir0ixr0iy) + Ixy0 + mtotr0Cxr0Cy, (55) s1,3 = s3,1 = ∑i = 1N (Ixzi − mir0ixr0iz) + Ixz0 + mtotr0Cxr0Cz, (56) s2,2 = ∑i = 1N (Iyyi + mi (r0iy2 + r0iz2)) + Iyy0 − mtot (r0Cx2 + r0Cz2), (57) s2,3 = s3,2 = ∑i = 1N (Iyzi − mir0iyr0iz) + Iyz0 + mtotr0Cyr0Cz, (58) s3,3 = ∑i = 1N (Izzi + mi (r0iy2 + r0iz2)) + Izz0 − mtot (r0Cx2 + r0Cy2).(59)Определитель S U определяется по формуле:
det (SU) = – s132s22 + 2s12s13s23 − s11s232 − s122s33 + s11s22s33. (60)Следовательно, S U может быть инвертировано символически, что приведет к симметричной матрице [3 × 3]:
SU − 1 = 1det (SU) [s22s33 − s232s13s23 − s12s33s12s23 − s13s22s13s23 − s12 s33s11s33 − s132s12s13 − s11s23s12s23 − s13s22s12s13 − s11s23s11s22 − s122] (61)Это символьное выражение для S U позволяет вычислить символьное выражение H0-1 с использованием уравнения (52).
Производная по времени обобщенной матрицы инерции
Производная по времени обобщенной матрицы инерции, H˙⋆, вычисляется путем взятия производной по времени из уравнения (45), что дает:
H.⋆ = ddt (Hm − H0mTH0−1H0m). (62)Производная матрицы, обратной по скаляру, может быть выражена как:
dQ − 1dx = −Q − 1dQdxQ − 1, (63), так как его можно получить сразу с
d (QQ − 1) dx = dEdx = 0 = dQdxQ − 1 + QdQ − 1dx, (64), где Q – любая обратимая квадратная матрица, а x – скаляр.Это позволяет вычислять производную по времени обобщенной матрицы инерции без необходимости вычисления производной по времени обратной матрицы инерции базового космического аппарата, H0-1:
H.⋆ = H.m− (H.0mTH0−1H0m + H0mTH0−1H.0m – H0mTH0−1H.0H0−1H0m). (65)В следующих подразделах обсуждается вычисление индивидуальных производных матрицы в уравнении (65).
Производная по времени матрицы инерции манипулятора
Взяв производную по времени от уравнения (36), получим:
ЧАС.m = ∑i = 1N (J.RiT JIiJRi + JRiT JI.iJRi + JRiT JIiJ.Ri + mi (J.TiT JTi + JTiT J.Ti)) (66)Единственными новыми значениями, которые должны быть вычислены, являются производные по времени якобианов углового и линейного движения, J˙Ri и J˙Ti, а также производная по времени матриц моментов инерции звеньев, JI˙i (1 ≤ i ≤ N ). Для вычисления этих членов требуются производные по времени матрицы направленного косинуса соединения и звена, JR˙Ji и JR˙Li. Производная по времени любой совместной матрицы направленного косинуса JRJi задается уравнением Дарбу (Hughes, 2004):
JR.Ji − 1q.i − 1, ∀ (1≤i≤N + 1). (68)В связи с определением систем координат сочленения и звена в разделе «Кинематика системы космического аппарата-манипулятора»:
JR.Li = JR.Ji + 1, ∀ (1≤i≤N). (69)Кроме того, производная по времени уравнения (30) дает:
JI.i = JR.Li LiIi JRLiT + JRLi LiIi JR.LiT, ∀ (1≤i≤N). (70)Производная по времени якобиана угловой скорости, определенного в уравнении (35), равна:
J.Ri = [JR.J1 (001) JR.J2 (001)… JR.Ji (001) 03, N-1], ∀ (1≤i≤N).k × (r.i − p.k), ∀ (k≤i). (73)Производная по времени матрицы инерции базового космического корабля
Производная по времени уравнения (28) задается как:
H.0 = [03,3-mtotr.0C × mtotr.0C × H.S]. (74)Используя уравнения (11) и (13), верхняя правая и нижняя левая подматрицы уравнения (74) могут быть получены из следующего:
mtotr.0C × = ∑i = 1Nmir.0i × = ∑i = 1Nmi (ri − r.0) × = ∑i = 1Nmi (ω0 × (ri − r0) + ∑j = 1i {[[JRJj (001) ] × (ri − pj)] q˙j}) ×. (75)Нижняя правая подматрица уравнения (74) вычисляется с использованием уравнения (29):
ЧАС.S = ∑i = 1N (JI.i − mi (r.0i × r0i × + r0i × r.0i ×)) + JI.0. (76)Производная по времени матрицы инерции динамической связи
Производная по времени матрицы динамической связи H 0 m в уравнении (31) приводит к:
H.0m = [J.TSH.Sq], (77), где из уравнений (32) и (34):
J.TS = ∑i = 1NmiJ.Ti, (78) H.Sq = ∑i = 1N (JI.iJRi + JIiJ.Ri + mi (r.0i × JTi + r0i × J.Ti)). (79)Выражение матрицы
c ⋆Из уравнения (48) элементы c ⋆ могут быть выражены как:
ck⋆ = −12q.T∂H⋆∂qkq., ∀ (1≤k≤N), (80)Для плоского случая Пападопулос (1990) дает выражение для c ⋆ . В общем случае для символьного вычисления c ⋆ требуются производные от H ⋆ по каждому углу соединения q k . Следуя аналогичной процедуре, которая используется для производной по времени от H ⋆ (см. Уравнение 65), получаем:
∂H⋆∂qk = ∂Hm∂qk − ∂H0m∂qkTH0−1H0m − H0mTH0−1∂H0m∂qk + H0mTH0−1∂H0∂qkH0−1H0m, ∀ (1≤k≤N) (81)Что касается приведенной выше производной по времени, вычисление производной обобщенной матрицы инерции требует отдельных вычислений, показанных в следующих параграфах.
Угловая производная матрицы инерции манипулятора
Производные по углу сустава матрицы инерции манипулятора из уравнения (36) даются как:
∂Hm∂qk = ∑ i = 1N (∂JRi∂qkT JIiJRi + JRiT∂JIi∂qkJRi + JRiT JIi∂JRi∂qk + mi∂JTi∂qkTJTi + miJTi T∂JTi∂qk), ∀ (1≤k≤N ) (82)Для вычисления этого выражения требуются производные по углу сустава матриц преобразования сустава и звена JTJi и JTLi, а также производные по углу сустава якобианов линейного и углового движения.Из уравнения (9) матрицы совместного преобразования равны:
JTJ i = JTJ k • A (qk, dk, αk, kak + kbk) • ∏l = k + 1i − 1A (ql, dl, αl, lal + lbl). (83), где однородная матрица преобразования JTJ k и матрицы DH A (ql, dl, αl, lal + lbl) ( k + 1 ≤ l ≤ i – 1) не зависят от угла сочленения q к . Следовательно, только одна матрица преобразования DH в цепочке умножения зависит от q k , с совместной угловой производной матрицы DH, определяемой по формуле:
∂A (qk, dk, αk, kck) ∂qk = [- sin qk− cos qk cos αk cos qk sin αk − ck sin qk cos qk− sin qk cos αk sin qk sin αkck cos qk00000000].(84)Следовательно, необходимо рассмотреть три случая:
(1) Если k > i – 1, матрица совместного преобразования не зависит от q k :
∂JTJ i∂qk | k> i − 1 = 04,4, (85)(2) Если k = i – 1, конечный множитель в произведении матриц преобразования зависит от q k , а производная изменяется на:
∂JTJ i∂qk | k = i − 1 = JTJ i − 1 • ∂A (qi − 1, di − 1, αi − 1, i − 1ai − 1 + i − 1bi − 1) ∂qi − 1, ( 86)(3) Для k < i – 1 одна из вспомогательных матриц зависит от q k :
∂JTJ i∂qk | k С помощью (10) производные по углу стыка матриц преобразования звеньев становятся: ∂JTL i∂qk = ∂JTJ i∂qkA (qi, di, αi, iai) + JTJ i∂A (qi, di, αi, iai) ∂qk. (88)Что касается матриц преобразования ссылок JTL i, следует рассмотреть три случая:
(1) Для k > i матрица преобразования ссылок не зависит от q k .
∂JTL i∂qk | k> i = 04,4, (89)(2) Для k = i , окончательная матрица преобразования DH должна быть дифференцирована для q k :
∂JTL i∂qk | k = i = JTJ i • ∂A (qi, di, αi, iai) ∂qi, (90)(3) Если k < i , мы можем повторно использовать производную матрицы совместного преобразования, разработанной выше:
∂JTL i∂qk = ∂JTJ i∂qkA (qi, di, αi, iai).l × (∂ri∂qk − ∂pl∂qk), ∀ (l≤i) ∀ (1≤k≤N). (94)Угловая производная матрицы динамической связи
Производные матрицы динамической связи вычисляются из уравнения (31) как:
∂H0m∂qk = [∂JTS∂qk∂HSq∂qk], ∀ (1≤k≤N), (95)где
∂JTS∂qk = ∑i = 1N (mi∂JTi∂qk), ∀ (1≤k≤N), (96) ∂HSq∂qk = ∑i = 1N {∂JIi∂qkJRi + JIi∂JRi∂qk + mi [(∂Jr0i∂qk) × JTi + r0i × ∂JTi∂qk]}, ∀ (1≤k≤N). (97)Так как r 0 не зависит напрямую от угла соединения, r 0 i (см. Уравнение 11) дифференцируется как:
∂r0i∂qk = ∂ri∂qk, ∀ (1≤i≤N) ∀ (1≤k≤N).(98)Угловая производная матрицы инерции базового космического корабля
Угловые производные матрицы инерции базового космического аппарата H 0 из уравнения (28) приводят к:
∂H0∂qk = [03,3 − mtot (∂r0C∂qk) × mtot (∂r0C∂qk) × ∂HS∂qk]. (99)Производные угла сочленения вектора относительного положения центра масс r 0 C из уравнения (13) вычисляются по формуле:
∂r0C∂qk = 1mtot∑i = 1N (mi∂r0i∂qk) = 1mtot∑i = 1N (mi∂ri∂qk), ∀ (1≤k≤N).(100)Матрица моментов инерции системы из уравнения (29) различается следующим образом:
∂HS∂qk = ∑i = 1N {∂JIi∂qk − mi [(∂ri∂qk) × r0i × + r0i × (∂ri∂qk) ×]}, ∀ (1≤k≤N), (101 ), откуда из уравнения (30):
∂JIi∂qk = ∂JRLi∂qk LiIi JRLiT + JRLi LiIi∂JRLi∂qkT ∀ (1≤k≤N). (102)Обобщенный якобиан
Для целей управления преобразование между пространством суставов и пространством задач требует использования якобиана (Siciliano et al. i03, N − i], (104)
с положением точки x i X i .Вклад комбинированной скорости базового космического корабля выражается якобианом [6 × 6] базового космического корабля J 0 X i :
J0Xi = [E − x0i × 03,3E], (105)где
x0i = xi − p0. (106)При использовании обобщенной формы уравнений движения можно сформулировать [6 × N ] обобщенный якобиан JXi⋆, такой что:
[JνXi Jωi] = JXi⋆q.. (107)Следовательно:
JXi⋆q. = J0Xix.0 + JmXiq .. (108)Используя уравнение (42) и предполагая, что M 0 = 0 6, 1 , x˙0 можно выразить как:
x.0 = −H0−1H0mq .. (109)Таким образом, обобщенный якобиан определяется как:
JXi * = JmXi − J0X iH0−1H0m (110)Если x i совпадает с положением конечного эффектора ( p E = p
N + ), результирующий обобщенный якобиан-якобиан, определенный уравнением (110) для произвольной точки, становится таким же, как обобщенный якобиан J ⋆ плавающего манипулятора, как первоначально определено Йошидой и Уметани (1993).Следовательно, совместные скорости, необходимые для движения рабочего органа с линейной скоростью ν E и угловой скоростью ω E , можно рассчитать по формуле: q. = J⋆ − 1 [νEωE] (111)Реализация имитационной модели для системы «плавучий космический корабль-манипулятор»
Используя обобщенные уравнения в символьной форме, представленные выше, можно реализовать компьютерную модель для моделирования системы плавучего космического корабля-манипулятора.Эта компьютерная модель может быть основана на двух подходах к реализации, которые мы здесь называем полной символьной реализацией и частичной символьной реализацией (см. Рисунок 3). Таким образом, численное моделирование может выполняться путем вычисления на каждом шаге интегрирования статических функций, содержащих символьные выражения, без выполнения итеративных процедур, таких как рекурсивный алгоритм Ньютона-Эйлера, как в доступной литературе по этому вопросу (см., Например, Mukherjee and Nakamura, 1992 ; Кариньян, Акин, 2000).В частичной символьной реализации числовые значения для матриц JTJ i, JTL i, H 0 , H 0 m , H
89
, и H0-1 вычисляются из их символьных выражений. Эти числовые значения затем используются для нахождения обобщенных матриц H ⋆ , C ⋆ и J ⋆ .В полной символьной реализации H ⋆ , C ⋆ , J ⋆ вычисляются непосредственно из их символьных выражений.Рисунок 3 . Структура псевдокода, иллюстрирующая два предложенных варианта реализации имитационной модели системы плавучего космического аппарата-манипулятора на основе обобщенного якобианского подхода.
Символьные реализации легко адаптируются к любому количеству узлов и любой структуре кинематической цепи системы космический аппарат-манипулятор.
Численное моделирование
Чтобы проверить предложенный аналитический подход, имитационная модель была реализована для двух тематических исследований: (1) планарный космический аппарат-манипулятор с манипулятором с 4 степенями свободы, который обычно используется в наземных экспериментах с системами космический аппарат-манипулятор, и (2) ) космический аппарат-манипулятор с пространственным манипулятором с 6 степенями свободы, подобный описанному в первоначальном обсуждении Йошида обобщенного якобианского подхода (Yoshida and Umetani, 1993).Имитационная модель была реализована в Matlab / Simulink, следуя подходу частичной символьной реализации, показанному на рисунке 3. Блок-схема общей имитируемой архитектуры управления проиллюстрирована на рисунке 4.
Рисунок 4 . Блок-схема общей имитируемой архитектуры управления, используемой для численного моделирования.
Обладая полным знанием обобщенных уравнений движения системы космический аппарат-манипулятор, этой системой можно управлять с помощью стандартной схемы управления, называемой Computed Torque Control (Siciliano et al., 2010). В частности, управляемый крутящий момент для шарнирных двигателей вычисляется из желаемого углового ускорения шарнира, угловой скорости и углового положения посредством операции прямой динамики. Входной сигнал управления совместным ускорением u¯ вычисляется с помощью закона управления пропорционально-производной (PD):
u¯ = KD (q.D − q.) + KP (qD − q) (112)В общем, коэффициенты усиления регулятора могут быть спроектированы на основе решений гармонического осциллятора:
KPi = τmax, i (qD − q) max, (113)с T max, i – максимальный крутящий момент двигателя для каждого шарнира.Управляющий вход, наконец, вводится в динамическую модель как ускорение для получения результирующего реактивного крутящего момента. Затем этот крутящий момент служит входом в реальную систему манипулятора. С манипулятором, используемым на орбитальном космическом корабле, всегда существует значительный уровень неопределенности, когда дело доходит до инерционных свойств системы космический корабль-манипулятор, в основном из-за состояния стабилизации топливных баков и связанного с этим колебания топлива. Следовательно, вычисленное управление крутящим моментом основано на оценках матриц инерционных свойств, H ~ ⋆ и C ~ ⋆:
τ = H˜⋆u¯ + C˜⋆ (q, q.). (115)В представленном здесь численном моделировании предполагалось совершенное знание инерционных свойств системы, таким образом, H ~ ⋆ = H⋆ и C ~ ⋆ = C⋆.
Моделирование с помощью планарной четырехзвенной системы манипулятора космического корабля
Моделируемая планарная система космический аппарат-манипулятор состоит из базового аппарата и четырех идентичных звеньев манипулятора. Массовые и инерционные свойства системы приведены в таблице 3, а свойства кинематической цепи обобщены в таблице 4.В целях иллюстрации коэффициенты усиления контроллера были установлены на K D i = 1 и K P i = 1 для всех соединений i . Изначально манипулятор полностью выдвинут по оси x, что соответствует нулевому углу для каждого сустава. В примере последовательности маневров одно сочленение за раз ускоряется до 0,1 рад / с в течение 10 с, затем останавливается в течение 2 с, вращается со скоростью -0,1 рад / с в течение 20 с, снова отдыхает в течение 2 с, затем возвращается в исходное состояние. .Базовый космический корабль изначально расположен в начале инерциальной системы координат, при этом все три угла Эйлера равны нулю.
Таблица 3 . Планарный аппарат-манипулятор с четырехзвенным манипулятором: массовые и инерционные свойства.
Таблица 4 . Планарный аппарат-манипулятор с четырехзвенным манипулятором: индивидуальные параметры Денавита-Хартенберга.
Как показано на рисунке 5A, динамическое соединение между базовым космическим кораблем и манипулятором создает компенсирующее движение базового космического корабля.Как и ожидалось, базовый космический корабль имеет компонент угловой скорости, который имеет противоположный знак по отношению к совместным скоростям и меньше по величине, поскольку базовый космический корабль имеет более высокую инерцию, чем манипулятор. Следует также отметить, что реакция базового космического корабля становится меньше по мере того, как последовательность совместных маневров продолжается «наружу», поскольку внешние суставы перемещают меньшую массу, чем внутренние суставы.
Рисунок 5 . Планарный аппарат-манипулятор с четырехзвенным манипулятором: (A) совместных скоростей и результирующие компоненты угловой скорости базового аппарата; (B) углов сочленения и результирующее отклонение положения базового космического корабля.
Аналогичное поведение очевидно на рисунке 5B, который иллюстрирует отклонение положения базового космического корабля в зависимости от углов сочленения. Поскольку общий центр масс системы остается неподвижным, центр масс базового космического корабля смещается вперед и возвращается в исходное положение x , а затем смещается влево и вправо в направлении x направление движения манипулятора влево и вправо. Величина отклонения положения зависит от комбинации расстояния между центром масс базового космического корабля и центром масс задействованных звеньев, а также общей массы или задействованных звеньев.Положение общего центра масс многочастичной системы остается неизменным.
Поскольку в этом примере шарниры манипулятора приводятся в действие исключительно внутренними моментами, как линейный, так и угловой момент системы космический аппарат-манипулятор остаются постоянными, а в данном случае равными нулю, как и ожидалось. Следовательно, линейный и угловой моменты космического корабля-базы должны быть противоположными по знаку, но равными по величине импульсам манипулятора. Это ожидаемое поведение подтверждается на рисунках 6A, B.Поскольку система космического корабля-манипулятора движется только в плоскости x-y, отсутствует линейный импульс вдоль оси z и угловой момент вокруг осей x и y.
Рисунок 6 . Планарный космический аппарат-манипулятор с четырехзвенным манипулятором: (А) количества движения; (B) угловой момент.
Моделирование с помощью пространственной шестизвенной космической системы-манипулятора
Моделируемая пространственная система космический аппарат-манипулятор состоит из базового аппарата и шести звеньев манипулятора.Массовые и инерционные характеристики системы приведены в таблице 5, параметры DH приведены в таблице 6. В целях иллюстрации коэффициент усиления контроллера был установлен на K D i = 1 и K P i = 1 для всех соединений i . Изначально манипулятор полностью выдвинут по оси x, что соответствует нулевому углу для каждого сустава. В примере последовательности маневров одно соединение за раз ускоряется до 0.1 рад / с в течение 10 с, затем отдых в течение 2 с, вращение со скоростью -0,1 рад / с в течение 20 с, снова отдых в течение 2 с, затем вращение обратно на нулевой угол. Базовый космический корабль изначально расположен в начале инерциальной системы координат, при этом три угла Эйлера равны нулю.
Таблица 5 . Пространственный космический аппарат-манипулятор с шестизвенным манипулятором: массовые и инерционные свойства (Йошида, Уметани, 1993).
Таблица 6 . Пространственный космический аппарат-манипулятор с шестизвенным манипулятором: индивидуальные параметры Денавита-Хартенберга.
Ось вращения шарнира 1 проходит вдоль оси x системы координат космического аппарата. Следовательно, вращение шарнира 1 вызывает вращение космического корабля-базы на 3 степени свободы, см. Рисунок 7A. Кроме того, он вызывает отклонение центра масс космического корабля-основы от его исходного положения в направлении x, y и z во время цикла соединения 1, и только в направлении x и z , когда суставы 2–6 активны, как показано на рисунке 7B.Положение общего центра масс многочастичной системы остается неизменным. Линейный и угловой моменты космического корабля-базы и манипулятора компенсируют друг друга (см. Рис. 8), поскольку общий импульс сохраняется.
Рисунок 7 . Пространственный космический аппарат-манипулятор с шестизвенным манипулятором: (A) совместных скоростей и результирующие компоненты угловой скорости базового космического корабля; (B) углов сочленения и результирующее отклонение положения базового космического корабля.
Рисунок 8 . Пространственный космический аппарат-манипулятор с шестизвенным манипулятором: (А) количества движения; (B) угловой момент.
Заключение
В данной статье представлен полный, пошаговый аналитический вывод уравнений движения плавающей системы космический аппарат-манипулятор с использованием обобщенного якобианского подхода для моделирования динамики системы космический аппарат-манипулятор. Сюда входят символьные аналитические выражения для всех матриц инерции системы космический аппарат-манипулятор, а также их производные по времени и производные по углу сочленения.Он также включает общее выражение для якобиана типичной точки на любом из звеньев системы космический аппарат-манипулятор, которое требуется для анализа и моделирования систем предотвращения столкновений и динамики контакта. Кроме того, в данной статье предлагаются новые и более подробные определения (см. Таблицу 1) возможных режимов маневрирования системы космический аппарат-манипулятор. В частности, две часто используемые категории (свободно летающие и свободно плавающие) расширены за счет введения пяти категорий (а именно: плавающий, вращающийся-плавающий, вращающийся-летающий, поступательно-летающий и летающий).Авторы считают, что принятие новых предложенных определений будет способствовать большей ясности, что будет полезно как для студентов, так и для исследователей в этой области. Кроме того, в статье представлены полностью символьная реализация и частичная символьная реализация компьютерных имитационных моделей, основанная на полном обобщенном якобианском подходе. Эти варианты реализации позволяют разрабатывать эффективное численное моделирование. Примеры моделирования для плоской четырехзвенной системы манипулятора космического корабля и пространственной системы манипулятора космического корабля с шестью связями показывают, что подход к моделированию эффективен и согласуется с физическими принципами.
В описании геометрии системы космический аппарат-манипулятор используются параметры DH, что допускает полную общность. Таким образом, в принципе, этот подход можно распространить на несколько манипуляторов с разомкнутой цепью. Фундаментальное предположение, которое было использовано при описании кинематики и динамики системы космический аппарат-манипулятор, заключается в том, что прямые звенья с центром масс звена расположены на прямой, проходящей через начало координат соседнего декартова сочленения. системы.Хотя это ограничение общего характера, оно также отражает тип роботов-манипуляторов, обычно используемых в орбитальных робототехнических системах. Кроме того, рассматривались только поворотные шарниры, поскольку призматические шарниры обычно не используются в приложениях орбитальной робототехники. Тем не менее, описание кинематики и динамики системы можно, в принципе, просто расширить, включив как звенья неправильной формы, так и призматические соединения. Шестерни в суставах не рассматривались, но их можно было добавить в анализ, используя, например, подход, подробно описанный в Siciliano et al.(2010). Углы Эйлера использовались при описании ориентации базового космического корабля: в принципе было бы просто использовать кватернионы, чтобы избежать любой возможной проблемы сингулярности ориентации.
Цель этого подробного представления обобщенного якобианского подхода – служить учебным пособием по построению полной аналитической модели сложной динамики системы космический аппарат-манипулятор. Хотя это руководство в основном нацелено на аэрокосмических инженеров, столкнувшихся с проблемой моделирования роботизированной системы при проектировании космического корабля для миссии сближения и захвата, оно также является хорошим справочником для инженеров-робототехников, поскольку оно объединяет материалы из распределенных источников в одну полную презентацию. .
Авторские взносы
МВт – главный автор. Он провел исследование литературы по обобщенному якобианскому подходу и вывел математические уравнения, чтобы заполнить пробелы в опубликованной литературе. Он также реализовал модель Matlab / Simulink, используемую для генерации примеров, показанных в статье. Он также руководил написанием статьи. SK работал с MW над проверкой правильности математических выводов и над разъяснением представления соглашения Денавита-Хартенберга.AG работала с MW над реализацией в Matlab / Simulink и над созданием графиков данных, используемых в статье. MR предоставил экспертные знания по лагранжевому методу, используемому для вывода уравнений движения, и по матричной / векторной математике.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Это исследование не получало специального гранта от какого-либо финансирующего агентства в государственном, коммерческом или некоммерческом секторах.
Список литературы
Агили, Ф. (2009). «Координационное управление свободно летающим манипулятором и его базовое положение для захвата и разрушения кооперативного спутника», в материалах Proceedings of 2009 IEEE / RSJ International Conference on Intelligent Robots and Systems (St. Louis, MO), 2365–2372.
Google Scholar
Бейн, М. Э. (2010). «Cygnus: назад в будущее – применение извлеченных уроков из коммерческих программ», Конференция и выставка AIAA SPACE 2010 (Анахайм, Калифорния: AIAA), 1–8.
Google Scholar
Баксалары, Дж. К., Стьян, Г. П. Х. (2002). Обобщенные инверсии разбитых матриц в форме Банахевича-Шура. Linear Algeb. Прил. 354, 41–47. DOI: 10.1016 / S0024-3795 (02) 00334-8
CrossRef Полный текст | Google Scholar
Barnhart, D., Sullivan, B., Hunter, R., Bruhn, J., Fowler, E., Hoag, L., et al. (2013). «Статус проекта Phoenix 2013» на конференции и выставке AIAA Space 2012 (Сан-Диего, Калифорния: AIAA), 1–17.
Caccavale, F., и Siciliano, B. (2001). «Кватернионное кинематическое управление резервированными системами космических аппаратов / манипуляторов», в материалах Труды Международной конференции по робототехнике и автоматизации IEEE 2001 г., (Сеул: IEEE), 435–440.
Google Scholar
Кампа, Р., Камарильо, К. (2008). «Единичные кватернионы: математический инструмент для моделирования, планирования пути и управления роботами-манипуляторами», в Robot Manipulators , ed M. Ceccarelli (Rijeka: InTech), 23–48.
Google Scholar
Кариньян, К. Р., Акин, Д. Л. (2000). Стабилизация реакции орбитальных роботов. IEEE Control Syst. Mag. 20, 19–33. DOI: 10.1109 / 37.887446
CrossRef Полный текст | Google Scholar
Колесхилл, Э., Ошиново, Л., Рембала, Р., Бина, Б., Дэниел, Р., и Шелли, С. (2009). Декстре: улучшение операций по техническому обслуживанию Международной космической станции. Acta Astronaut. 64, 869–874. DOI: 10.1016 / j.actaastro.2008.11.011
CrossRef Полный текст | Google Scholar
Дрейер, Л. (2009). «Последние разработки ракет-носителей Falcon 1 и Falcon 9 компании SpaceX и космических кораблей Dragon», в документе IEEE Aerospace Conference (Big Sky, MT: IEEE).
Google Scholar
Дубовский, С., Пападопулос, Э. (1993). Кинематика, динамика и управление свободно летающими и свободно плавающими системами космической робототехники. IEEE Trans. Robotics Autom. 9, 531–543.
Google Scholar
Флорес-Абад, А., Ма, О., Фам, К., и Ульрих, С. (2014). Обзор технологий космической робототехники для обслуживания на орбите. Прогр. Aerospace Sci. 68, 1–26. DOI: 10.1016 / j.paerosci.2014.03.002
CrossRef Полный текст | Google Scholar
Гудман, Дж. Л. (2006). История сближения и сближения космических челноков. J. Spacecr. Ракеты 43, 944–959. DOI: 10,2514 / 1,19653
CrossRef Полный текст | Google Scholar
Хейл, У., Лейн, Х., Лулла, К.и Чаплин Г. (2011). Крылья на орбите: научное и инженерное наследие космических кораблей 1971-2010 гг. Вашингтон, округ Колумбия: НАСА.
Google Scholar
Хо, Дж. Ю. Л. (1977). Метод прямого пути для гибкой динамики многотельных космических аппаратов. J. Spacecr. Ракеты 14, 102–110.
Google Scholar
Hughes, P. C. (1979). Динамика цепочки гибких тел. J. Astronautical Sci. 27, 359–380.
Хьюз, П.С. (2004). Динамика ориентации космических аппаратов. Mineola, NY: Dover Publications.
Google Scholar
Кеннеди, Ф. Г. (2008). «Орбитальный экспресс: достижения и извлеченные уроки», в Proceedings of the AAS Guidance and Control Conference (Breckenridge, CO: Univelt), 575–586.
Google Scholar
Койперс, Дж. Б. (2000). «Кватернионы и последовательности вращения», в материалах Международной конференции по геометрии, интегрируемости и квантованию (София: Coral Press Scientific Publishing), 127–143.
Google Scholar
Лян Б., Сюй Ю. и Бергерман М. (1998). Сопоставление космического манипулятора с динамически эквивалентным манипулятором. J. Dyn. Syst. Измер. Контроль 120, 1–7.
Google Scholar
Лонгман Р. В., Линдберг Р. Э. и Зедд М. Ф. (1987). Спутниковые манипуляторы – новая кинематика и компенсация момента реакции. Внутр. Дж. Роб. Res. 6, 87–103.
Google Scholar
Марчези М. (1997).«Стратегия управления свободно летающим космическим манипулятором», в Труды 8-й Международной конференции по передовой робототехнике (ICAR ’97) (Монтерей, Калифорния), 665–670
Google Scholar
Моосавиан, С.А.А., и Пападопулос, Э. (2004). Явная динамика космических безбилетников с несколькими манипуляторами через SPACEMAPLE. Adv. Робототехника 18, 223–244. DOI: 10.1163 / 156855304322758033
CrossRef Полный текст | Google Scholar
Моосавян, С.А.А., и Пападопулос, Э. (2007). Свободно летающие роботы в космосе: обзор моделирования динамики, планирования и управления. Robotica 25, 537–547. DOI: 10.1017 / S0263574707003438
CrossRef Полный текст | Google Scholar
Мукерджи Р. и Накамура Ю. (1992). Формулировка эффективных вычислений обратной динамики космических роботов. IEEE Trans. Робот. Автомат. 8, 400–406.
Google Scholar
Накамура Ю. и Мукерджи Р. (1989).«Неголономное планирование пути космических роботов», в материалах Proceedings of 1989 International Conference on Robotics and Automation (Scottsdale, AZ: IEEE), 1050–1055.
Google Scholar
Нанос, К., Пападопулос, Э. (2011). Об использовании свободно плавающих космических роботов при наличии углового момента. Intell. Серв. Робот. 4, 3–15. DOI: 10.1007 / s11370-010-0083-2
CrossRef Полный текст | Google Scholar
Ненчев Д. Н., Йошида К.(1999). Проблемы анализа ударов и управления движением после удара свободно плавающего космического робота, подверженного силовому импульсу. IEEE Trans. Робот. Автомат. 15, 548–557.
Google Scholar
Ненчев Д. Н., Йошида К., Вичиткулсават П. и Учияма М. (1999). Управление реакцией в нулевом пространстве систем манипуляторов, смонтированных на гибкой конструкции. IEEE Trans. Робот. Автомат. 15, 1011–1023.
Google Scholar
Ода, М. (2000). «Опыт и уроки, извлеченные из робота-спутника ETS-VII», в Proceedings of the 2000 IEEE International Conference on Robotics & Automation (San Francisco, CA: IEEE), 914–919.
Google Scholar
Пападопулос, Э. Г. (1990). О динамике космических манипуляторов и управлении ими. к.э.н. Диссертация, Кембридж, Массачусетс: Массачусетский технологический институт.
Google Scholar
Паттен Л., Эванса Л., Ошиново Л., Очисор М., Казухару Н., Лодевийк А. и др. (2002). «Робототехника Международной космической станции: сравнительное исследование ERA, JEMRMS и MSS», в 7-м семинаре ЕКА по передовым космическим технологиям для робототехники и автоматизации «ASTRA 2002» (Нордвейк: ESA), 1–8.
Google Scholar
Рид Б. Б., Смит Р. К., Наас Б., Пеллегрино Дж. И Бэкон К. (2016). «Миссия по обслуживанию восстановления L», в AIAA Space Forum (Лонг-Бич, Калифорния: AIAA), 1–8.
Google Scholar
Рейнтсема Д., Тхэтер Дж., Ратке А., Науманн В., Ранк П. и Соммер Дж. (2010). «DEOS – немецкий робототехнический подход к обеспечению безопасности и спуска неисправных спутников с низких околоземных орбит», в материалах Труды Международного симпозиума по искусственному интеллекту, робототехнике и автоматизации в космосе (i-SAIRAS) (Саппоро, JAXA), 244–251.
Google Scholar
Roesler, G., Jaffe, P., and Henshaw, G. (2017). Орбитальная механика. IEEE Spectrum 54, 44–50. DOI: 10.1109 / MSPEC.2017.7864756
CrossRef Полный текст | Google Scholar
Саллабергер, К. (1997). Канадские космические роботы. Acta Astronaut. 41, 239–246.
Google Scholar
Сарджент, Д. Г. (1984). «Влияние динамики конструкции удаленного манипулятора на управление полетом шаттла на орбите», в 17-я конференция по динамике жидкости, плазменной динамике и лазерам (Сиэтл, Вашингтон: AIAA).
Google Scholar
Сато, Н., Вакабаяси, Ю. (2001). «Конструктивные особенности JEMRMS и темы испытаний», в Материалы 6-го Международного симпозиума по искусственному интеллекту, робототехнике и автоматизации в космосе: i-SAIRAS 2001 (St-Hubert, QC: CSA).
Google Scholar
Шумейкер Дж. И Райт М. (2004). «Программа орбитальной экспресс-разработки космических операций», в труде SPIE 5088, Space Systems Technology and Operations (Орландо, Флорида), 56–65.
Google Scholar
Сицилиано Б., Шавикко Л., Виллани Л. и Ориоло Г. (2010). Робототехника. Лондон: Springer-Verlag.
Google Scholar
Штибер, М. Э., Трудель, К. П., и Хантер, Д. Г. (1997). «Роботизированные системы для международной космической станции», в Труды Международной конференции IEEE 1997 года по робототехнике и автоматизации (Альбукерке, Нью-Мексико: IEEE), 3068–3073.
Google Scholar
Стоункинг, Э.(2007). «Динамические уравнения движения Ньютона-Эйлера для многофюзеляжного космического корабля», AIAA Guidance, Navigation and Control Conference and Exhibit, Guidance, Navigation, Control and Co-Located Conferences (Hilton Head, SC: AIAA), 1 –13.
Google Scholar
Уэда, С., Касаи, Т., и Уэмацу, Х. (2010). «Техника сближения HTV и оценка проекта GN&C на основе результатов первого полета на орбите», Конференция специалистов по астродинамике AIAA / AAS, руководство, навигация, управление и совместные конференции (Торонто, ON: AIAA), 1– 12.
Уметани Ю. и Йошида К. (1989). Решенное управление скоростью движения космических манипуляторов с обобщенной матрицей Якоби. IEEE Trans. Robotics Autom. 5, 303–314.
Google Scholar
Вафа, З., и Дубовски, С. (1987). «О динамике манипуляторов в космосе с использованием подхода виртуального манипулятора», в Международная конференция IEEE по робототехнике и автоматизации (Роли, Северная Каролина).
Google Scholar
Вэй, Р., Цзинь, М.Х., Ся, Дж. Дж., Се, З. В., Ши, Дж. Х. и Лю, Х. (2006). «Высокоточное распределенное моделирование аппаратных средств в цикле для космических роботов», в Труды Международной конференции IEEE 2006 г. по мехатронике и автоматизации (Лоян: IEEE), 2150–2155.
Google Scholar
Верц, Дж. Р. (1978). Определение и контроль ориентации космических аппаратов . Бостон, Массачусетс: Kluwer Academic Publishers.
Google Scholar
Ви, Б. (2008). Динамика космических аппаратов и управление 2-е изд. Рестон, Вирджиния: AIAA.
Сюй, В., Лю, Ю., Лян, Б., Сюй, Ю., Ли, К., и Цян, В. (2008). Неголономное планирование пути свободно плавающей космической робототехнической системы с использованием генетических алгоритмов. Adv. Робот. 22, 451–476. DOI: 10.1163 / 156855308X2
CrossRef Полный текст | Google Scholar
Йошида, К. (2003). Инженерные испытательные полеты спутника VII для изучения динамики и управления космическими роботами: теории на лабораторных испытательных стендах десять лет назад, теперь на орбите. Внутр. Дж. Роб. Res. 22, 321–335. DOI: 10.1177 / 02783642005003
CrossRef Полный текст | Google Scholar
Йошида К. и Наканиши Х. (2003). «Согласование импеданса при захвате спутника космическим роботом», в протоколе Proceedings of the 2003 IEEE / RSJ Intl. Конференция по интеллектуальным роботам и системам. (Лас-Вегас, Невада: IEEE), 3059–3064.
Google Scholar
Йошида, К., Ненчев, Д. Н. (1998). «Общая формулировка для недостаточно задействованных манипуляторов», Восьмой международный симпозиум по исследованиям робототехники (Шонан).
Google Scholar
Йошида К. и Уметани Ю. (1993). «Управление космическими манипуляторами с помощью обобщенного якобиана», в Space Robotics: Dynamics and Control , ред. Я. Сю и Т. Канаде (Бостон, Массачусетс: Springer), 165–204.
Google Scholar
Номенклатура
J = инерциальная декартова система координат на орбите с системой космический аппарат-манипулятор
Ji = декартова система координат, прикрепленная к стыку i
Li = декартова система координат, привязанная к звену i
α i = параметр Денавита-Хартенберга для поворота от оси системы координат звена z i − 1 к оси z i вокруг оси x i
ω E = угловая скорость рабочего органа относительно инерциальной рамы J
ω i = угловая скорость звена i относительно инерциальной системы координат J
ω 0 = угловая скорость базового КА относительно инерциальной системы координат J
Ω = начало инерциальной декартовой системы координат J
[ϵ & ζ & η] T = углы Эйлера (последовательность 1-2-3), выражающие ориентацию системы координат, прикрепленной к сочленению 1, относительно системы координат в центре масс космического корабля CM 0
[ϕ & θ & Ψ] T = углы Эйлера (последовательность 1-2-3), выражающие ориентацию базового космического корабля (звено 0) относительно инерциальной системы координат J
ϱ i = начало декартовой системы координат, прикрепленной к стыку i
τ = [ N × 1] матрица крутящих моментов в шарнирах (каждый элемент τ i выражает скалярное значение составляющей крутящего момента вдоль k ^ i из-за приводного шарнира двигателя i )
θ i = параметр Денавита-Хартенберга для вращения между осью системы координат звена x i − 1 и x i вокруг оси z i − 1 900
aℬ = [3 × 1] матрица компонент вектора a по декартовой системе координат B
a × = [3 × 3] кососимметричная матрица, связанная с вектором a
a i = вектор положения от ϱ i до центра масс звена i
A = [4 × 4] Матрица преобразования Денавита-Хартенберга
b 0 = вектор положения от CM 0 до ϱ 1
b i = вектор положения от CM i до ϱ i +1
c i = параметр Денавита-Хартенберга для смещения между осью системы координат звена z i − 1 и осью z i вдоль оси x i
c ⋆ = [ N × 1] матрица обобщенных нелинейных членов уравнений движения
C ⋆ = [ N × 1] матрица обобщенных центростремительных членов и членов Кориолиса
C ~ ⋆ = [ N × 1] матрица оцененных обобщенных центростремительных членов и членов Кориолиса
c 0 = [6 × 1] матрица производных для положения базового космического аппарата
c м = [ N × 1] матрица производных углов шарниров манипулятора
CM i = центр масс звена i
CM tot = центр масс космического аппарата-манипулятора
d i = параметр Денавита-Хартенберга для смещения между осью системы координат звена x i − 1 и осью x i вдоль оси z i 1
ε = [3 × 1] векторная часть единичного кватерниона q
η = Скалярная часть кватерниона единицы q
𝕀 3, 3 = [3 × 3] единичная матрица
H ⋆ = [ N × N ] обобщенная матрица инерционных свойств
H˜⋆ = [ N × N ] оценочная матрица обобщенных инерционных свойств
H 0 = [6 × 6] основная матрица свойств инерции
H 0 м = [6 × N ] матрица динамической связи основания / манипулятора
H м = [ N × N ] матрица инерционных свойств манипулятора
H S = [3 × 3] матрица моментов инерции системы
H Sq = [3 × N ] матрица вклада энергии углового движения
ILi i = [3 × 3] матрица моментов инерции узла звена i относительно декартовой системы координат, прикрепленной к звену i
JIi = [3 × 3] матрица моментов инерции звена i узла относительно инерциальной системы координат J
J ⋆ = [6 × N ] обобщенный якобиан для движения рабочего органа
JXi⋆ = [6 × N ] обобщенный якобиан для движения X i
J 0 X i = [6 × 6] якобиан для вклада движения базового космического корабля в скорость X i
Jk⋆ = [6 × N ] обобщенный якобиан для точки действия внешней силы или крутящего момента F k
J м X i = [6 × N ] Якобиан для вклада движения манипулятора в скорость X 28 900 i
J Ri = [3 × N ] Якобиан углового перемещения для центра масс звена i
J Ti = [3 × N ] Якобиан линейного перемещения для центра масс звена i
j T i k = [3 × 1] k-й столбец матрицы J Ti
Дж TS = [3 × N ] матрица вклада энергии линейного движения
K D = [ N × 1] матрица элементов K D i
K D i = коэффициент усиления регулятора производной
k ^ i = единичный вектор по оси z системы координат, прикрепленной к соединению i
K P = [ N × 1] матрица элементов K P i
K P i = коэффициент усиления пропорционального регулятора
L = лагранжиан
L = вектор углового момента относительно CM 0 , выраженный в кадре J
м i = масса звена i в сборе (включая соединяемые части шарниров i и i + 1 )
JM0 = [6 × 1] комбинированная матрица начального импульса (линейного и углового) относительно центра масс базового космического корабля
м tot = масса космического аппарата-манипулятора
N = количество шарниров манипулятора
0 i, j = [ i × j ] нулевая матрица
P = вектор импульса относительно CM 0 , выраженный в системе координат J
p i = вектор положения от точки Ω до точки ϱ i
q = [ N × 1] матрица элементов q i
q D = [ N × 1] матрица элементов q D
q = [4 × 1] кватернион единиц
q D i = желаемое угловое смещение шарнира i
q i = угловое смещение шарнира i
qB rA = [4 × 1] единичный кватернион, выражающий вращение между системой координат A и системой координат B
r C = вектор положения от Ω до CM до выражен в кадре J
r i = вектор положения от точки Ω к точке CM i выражен в кадре J
r 0C = вектор положения от CM 0 до CM до выражено в рамке J
r 0i = вектор положения от CM 0 до CM i выражен в кадре J
RB A = [3 × 3] матрица направляющих косинусов из системы координат A в систему координат B
S U = [3 × 3] Дополнительная матрица Шура верхней левой подматрицы H b
s j, k = строка j , столбец k элемент S U
tB A = [4 × 1] четырехвектор, выражающий перенос начала системы координат между системой A и системой B
T = кинетическая энергия
τ max, i = максимальный крутящий момент двигателя для шарнира i
ТБ A = [4 × 4] матрица однородного преобразования из системы координат A в систему координат B
u = [ N × 1] матрица управляющих входов для вычисленного управления крутящим моментом
v 0 = линейная скорость КА относительно инерциальной системы координат J
v E = линейная скорость рабочего органа относительно инерциальной рамы J
v X i = линейная скорость произвольной точки X i , расположенной на звене i манипулятора относительно инерциальной рамки J
Jx0 = [6 × 1] комбинированная матрица положения компонентов линейного положения и параметров ориентации базового космического корабля, (Jxb = [Jr0 Tϕθψ] T)
Jx˙0 = [6 × 1] комбинированная матрица скоростей линейных и угловых составляющих скорости космического корабля-базы,
(Jx.0 = [Jv0 T Jω0 T] T = [Jv0 T ([10− sin θ0 cos ϕ cos θ sin ϕ0− sin ϕ cos ϕ cos θ] [ϕ˙θ˙ψ˙]) T] T)x 0i = вектор положения от CM 0 до произвольной точки на линии i
X i = произвольная точка на звене i
x i = вектор положения от Ω до произвольной точки на линии i
DCM = матрица направленного косинуса
DEM = динамически эквивалентный манипулятор
DH = Денавит-Хартенберг
DOF = степень свободы
EE = конечный эффект
ETS-VII = Инженерный испытательный спутник VII
GJM = Обобщенная матрица Якоби
HTV = Транспортное средство H-II
МКС = Международная космическая станция
JEMRMS = Японский экспериментальный модуль Система удаленного манипулятора
PD = пропорционально-производный регулятор
SPDM = ловкий манипулятор специального назначения
SRMS = Система дистанционного манипулятора Shuttle
VM = виртуальный манипулятор.
Какие кинематические формулы?
Kinematic Equations: Целью этого первого раздела “Класса физики” было исследование разнообразных средств, с помощью которых можно описать движение объектов. Разнообразие представлений, которые мы исследовали, включает словесные представления, графические представления, числовые представления и графические представления (графики положения-времени и графики скорости-времени).
В Уроке 6 мы исследуем использование уравнений для описания и представления движения объектов.Эти уравнения известны как кинематические уравнения. Существует множество величин, связанных с движением объектов: смещение (и расстояние), скорость (и скорость), ускорение и время.
Что такое кинематические формулы?Знание каждой из этих величин дает описательную информацию о движении объекта. Например, если известно, что автомобиль движется с постоянной скоростью 22,0 м / с, на север в течение 12,0 секунд для смещения на север на 264 метра, то движение автомобиля полностью описано.И если известно, что вторая машина ускоряется из положения покоя с ускорением на восток 3,0 м / с 2 в течение 8,0 секунд, обеспечивая конечную скорость 24 м / с, восток и смещение на восток 96 метров. , то полностью описывается движение этой машины.
Эти два утверждения предоставляют полное описание движения объекта. Однако не всегда такая полнота известна. Часто бывает так, что известны лишь некоторые параметры движения объекта, а остальные неизвестны.Например, приближаясь к светофору, вы можете узнать, что ваша машина развивает скорость 22 м / с, восток, и способна выдерживать заносное ускорение 8,0 м / с. 2 , запад.
Однако вы не знаете, какое смещение испытает ваша машина, если бы вы резко нажали на тормоз и занесло до полной остановки; и вы не знаете, сколько времени потребуется, чтобы остановиться. В таком случае неизвестные параметры могут быть определены с использованием принципов физики и математических уравнений (кинематических уравнений)
4 кинематических уравнения
Кинематика – это изучение движущихся объектов и их взаимосвязей.Есть четыре (4) кинематических уравнения, которые относятся к смещению D, скорости v, времени t и ускорению a.
a) D = v i t + 1/2 при 2 b) (v i + v f ) / 2 = D / t
c) a = (v f – v i ) / t d) v f 2 = v i 2 + 2aD
D = смещение
a = ускорение
т = время
v f = конечная скорость
v i = начальная скорость
Какие 3 кинематических уравнения?
Если мы знаем , три из этих пяти кинематических переменных – Δ x, t, v 0, v, a \ Delta x, t, v_0, v, a Δx, t, v0, v, adelta, x, запятая , t, запятая, v, начальный индекс, 0, конечный индекс, запятая, v, запятая, a – для объекта с постоянным ускорением мы можем использовать кинематическую формулу , см. ниже, чтобы найти одну из неизвестных переменных .
Сколько существует кинематических уравнений?
Четыре кинематических уравнения , которые описывают движение объекта: В приведенных выше уравнениях используются различные символы. Каждый символ имеет свое особое значение. Символ d обозначает смещение объекта.
Для чего используются кинематические уравнения?
Кинематические уравнения можно использовать для расчета различных аспектов движения, таких как скорость, ускорение, смещение и время.
Список кинематических уравнений
Кинематические формулы – это набор формул, которые относятся к пяти кинематическим переменным, перечисленным ниже.
Большой 1.
четырехъядерный v = v0 + at1
v = v0 + at1,
точка, пробел, v, равно, v, начальный индекс, 0, конечный индекс, плюс, a, t
Большой 2.
четырехъядерный {\ Delta x} = (\ dfrac {v + v_0} {2}) t2
Δx = (2v + v0) t2,
точка, пробел, дельта, x, равно, левая скобка, начальная дробь, v, плюс, v, начальный нижний индекс, 0, конечный нижний индекс, деление на, 2, конечная дробь, правая скобка, t
Большой 3.2 + 2а \ Дельта x4.
v2 = v02 + 2aΔx4,
точка, пробел, v, начальный надстрочный индекс, 2, конечный надстрочный индекс, равно, v, начальный подстрочный индекс, 0, конечный подстрочный индекс, начальный надстрочный индекс, 2, конечный надстрочный индекс, плюс, 2, a, дельта, x
Поскольку кинематические формулы являются точными только в том случае, если ускорение является постоянным в течение рассматриваемого временного интервала, мы должны быть осторожны, чтобы не использовать их при изменении ускорения. Кроме того, кинематические формулы предполагают, что все переменные относятся к одному и тому же направлению: по горизонтали xxx, по вертикали yyy и т. Д.2} g = 9,81s2m g, равно, 9, точка, 81, начальная дробь, m, деленная на, s, начальный верхний индекс, 2, конечный верхний индекс, конечная дробь.
Это и странно, и удачно, если вдуматься. Это странно, поскольку это означает, что большой валун будет ускоряться вниз с тем же ускорением, что и небольшой камешек, и, если его уронить с той же высоты, он одновременно ударится о землю.
Это удачно, поскольку нам не нужно знать массу снаряда при решении кинематических формул, поскольку свободно летящий объект будет иметь такую же величину ускорения, g = 9.2} ay = −9,81s2m a, начальный индекс, y, конечный индекс, равно, минус, 9, точка, 81, начальная дробь, m, деленное на, s, начальный верхний индекс, 2, конечный верхний индекс, конечная дробь для снаряд, когда мы подставляем кинематические формулы.
Физика кинематических уравнений
Кинематические уравнения – это набор из четырех уравнений, которые можно использовать для прогнозирования неизвестной информации о движении объекта, если известна другая информация. Уравнения можно использовать для любого движения, которое можно описать как движение с постоянной скоростью (ускорение 0 м / с / с) или движение с постоянным ускорением.Их нельзя использовать в течение какого-либо периода времени, в течение которого изменяется ускорение. Каждое из кинематических уравнений включает четыре переменные. Если известны значения трех из четырех переменных, то можно рассчитать значение четвертой переменной. Таким образом, кинематические уравнения предоставляют полезные средства прогнозирования информации о движении объекта, если известна другая информация.
Например, если значение ускорения, а также начальное и конечное значения скорости буксирующего автомобиля известны, то смещение автомобиля и время можно предсказать с помощью кинематических уравнений.Урок 6 этого модуля будет посвящен использованию кинематических уравнений для прогнозирования числовых значений неизвестных величин для движения объекта.
Четыре кинематических уравнения, описывающие движение объекта:
В приведенных выше уравнениях используются различные символы. Каждый символ имеет свое особое значение. Символ d обозначает смещение объекта. Символ t обозначает время, в течение которого объект двигался. Символ обозначает ускорение объекта.А символ v обозначает скорость объекта; индекс i после v (как в v i ) указывает, что значение скорости является начальным значением скорости, а индекс f (как в v f ) указывает, что значение скорости является окончательным значением скорости.
Каждое из этих четырех уравнений надлежащим образом описывает математическую связь между параметрами движения объекта. Таким образом, их можно использовать для прогнозирования неизвестной информации о движении объекта, если известна другая информация.В следующей части Урока 6 мы исследуем, как это сделать.
Читайте также: Формула линейной интерполяции
Основные кинематические уравнения
Кинематика – это исследование движения объектов без учета сил, вызывающих это движение. Эти знакомые уравнения позволяют студентам анализировать и предсказывать движение объектов, и студенты будут продолжать использовать эти уравнения на протяжении всего изучения физики. Твердое понимание этих уравнений и того, как их использовать для решения проблем, необходимо для успеха в физике.Эта статья представляет собой чисто математическое упражнение, предназначенное для быстрого обзора того, как уравнения кинематики выводятся с помощью алгебры.
Это упражнение ссылается на диаграмму на рис. 1, на которой ось x представляет время, а ось y представляет скорость. Диагональная линия представляет движение объекта, скорость которого изменяется с постоянной скоростью. Заштрихованная область (A 1 + A 2 ) представляет смещение объекта в течение интервала времени между t 1 и t 2 , в течение которого скорость объекта увеличилась с v 1 до v 2. .
В этом документе будут использоваться следующие переменные:
v = величина скорости объекта (метры в секунду, м / с)
v 1 = величина начальной скорости (метров на секунда, м / с) (в некоторых текстах это vi или v 0 )
v 2 = величина конечной скорости (метры в секунду, м / с) (в некоторых текстах это v f )
a = величина ускорения (в метрах в секунду в квадрате, м / с 2 )
s = вектор смещения, величина смещения – это расстояние,
s = │ s │ = d (векторы выделены жирным шрифтом; тот же символ, не выделенный жирным шрифтом, представляет величину вектора)
Δ указывает на изменение, например Δv = (v 2 –v 1 )
t = время
t 1 = начальное время
t 2 = Последний раз
Список кинематических уравнений в физике (Читать)
Кинематические уравнения в физике
Кинематика – это раздел механики, имеющий дело с движением тел без ссылки на массу или силу.В физике есть три кинематических уравнения для тел, движущихся с равномерным ускорением. Эти уравнения связывают начальную скорость, конечную скорость, ускорение, время и расстояние, пройденное движущимся телом.
Для вывода уравнений движения мы предполагаем, что движение идет по прямой. Следовательно, мы рассматриваем только величину смещений, скоростей и ускорений.
Список кинематических уравнений в физике
Вывод первого уравнения движения графическим методом
Рассмотрим тело, движущееся с начальной скоростью Vi по прямой с равномерным ускорением a.Его скорость становится равной Vf по прошествии времени t. Движение тела описывается графиком скорость-время, представленным линией AB. Наклон линии AB равен ускорению a. Общее расстояние, пройденное телом, показано заштрихованной областью под линией AB. Из этого графика легко получить кинематические уравнения движения.
График скорости движения тела и времени показан на рисунке. Наклон линии AB дает ускорение тела.
См. Также: Законы движения Ньютона
Вывод второго уравнения движения графическим методом
Представьте, что тело движется с начальной скоростью «Vi» по прямой линии с равномерным ускорением «a».Пусть его скорость станет “Vf” по прошествии времени t. Движение тела описывается графиком скорость-время линией AB, как показано на рисунке ниже. Общее расстояние «S», пройденное телом, равно общей площади OABD, указанной на графике.
Известно как 2-е уравнение движения.
Третье (3-е) уравнение движения графическим методом
Рассмотрим тело, движущееся с начальной скоростью «vi» по прямой с равномерным ускорением «a».Пусть по прошествии времени t его скорость станет Vf. Движение тела описывается графиком скорость-время, показанным на рисунке линией AB. Общее расстояние S, пройденное телом, выражается общей площадью OABD под графиком.
Это 3-е уравнение движения.
Условия, при которых могут применяться эти уравнения:
1: Движение должно быть одномерным.
2: Ускорение должно быть равномерным.
3: Система отсчета должна быть инерциальной.
Связанные темы:
Численность, математика и статистика – Набор академических навыков
Переменное ускорение (механика)
Введение
Уравнения SUVAT из уравнений движения могут использоваться только тогда, когда объект движется с постоянным ускорением. Когда ускорение меняется, мы должны использовать расчет.
На диаграмме выше показана взаимосвязь между ускорением $ a $, скоростью $ v $ и перемещением $ x $.
- Скорость – это скорость изменения смещения, поэтому для получения скорости от смещения необходимо дифференцировать.
- Чтобы найти смещение относительно скорости, вы интегрируете.
- Ускорение – это скорость изменения скорости. Чтобы получить ускорение от скорости, вы дифференцируете.