
Гироскоп. Виды и устройство. Работа и применение. Особенности
Гироскоп – это устройство со свободной осью вращения, способное реагировать на изменение угла ориентирования тела, в котором оно закрепляется. Ключевая особенность прибора в сохранении неизменного положения, что позволяет его использовать как датчик для определения перемещения и поворота объекта, в котором он расположен.
Как устроен и работает гироскопВ упрощенном варианте изложения принципа работы классического устройства его можно сравнить с обыкновенным детским волчком. Центральный элемент прибора вращается по своей вертикальной оси, при этом он фиксируется в рамке. Последняя способна поворачиваться только по горизонтальной оси. Она закрепляется в еще одной рамке, которая может оборачиваться вокруг третьей оси. Такая конструкция прибора позволяют его центральному элементу всегда находиться в вертикальном положении, вне зависимости от того как будет поворачиваться корпус гироскопа.
Разновидности гироскопов по принципу действияКонструкцию гироскопа принято разделять на две группы по принципу действия:
- Механические.
- Оптические.
Первыми появились механические приборы, от которых и пошло изучение гироскопического эффекта. Однако сфера использования таких устройств ограничена и не позволяет их интегрировать в современную технику, которая нуждается в ориентире для определения положения в пространстве. Вследствие этого появилась оптическая группа гироскопов.
МеханическиеДанные приборы представляют собой классическую конструкцию. Наиболее ярким представителем данной группы является роторный гироскоп. Он представляет собой быстро вращающееся твердое тело. Его ось вращения может свободно изменять свою ориентацию в пространстве. Во время работы устройства скорость вращения его центрального элемента значительно превышает обороты по другим осям. Благодаря этому роторный прибор способен сохранять направление оси вращения даже при воздействии на корпус устройства внешних сил. При попытке переместить прибор наблюдается эффект сопротивления.
При попытке переместить прибор наблюдается эффект сопротивления.
Роторные устройства не используются как датчики, а являются стабилизирующим элементом для различных конструкций и механизмов. По данному принципу изготовляется спортивный кистевой гироскопический тренажер. Такой прибор представляет собой шар, внутри которого располагается гироскопический элемент со своей осью вращения.
Для его запуска применяется небольшой шнурок, который наматывается на центральную часть тренажера. При его выдергивании центральное тело начинает вращаться по своей оси, при этом внешняя оболочка тренажер раскручивается кистью по часовой стрелке. Вращающееся центральное тело начинает противодействовать оборотам корпуса, создавая значительную нагрузку. При этом такое воздействие лишь ускоряет обороты главного элемента, повышая противодействие. После запуска тренажер сложно удержать в руке, поскольку он постоянно норовит вырваться в разные стороны. Создается впечатление удержания живого объекта.
ОптическиеДанная группа устройств представлена несколькими разновидностями. Все они работают на основании физического эффекта Саньяка. Согласно ему, скорость света является постоянной в инерциальной системе отсчетов. При этом если отправить луч в неинерциальной системе, то его скорость поменяется. Если траектория луча будет проходить через место вращения устройства, то произойдет задержка по времени достижения светом конечной точки. Получаемая оптическая разница напрямую зависит от величины углового поворота датчика.
Сфера использования гироскоповГироскоп широко используется в:
- Авиации.
- Автомобилестроении.
- Мобильных устройствах и прочая подобная техника.
- Системах стабилизации видеокамер.
- Навигации.
Датчики, работающие по принципу гироскопа, являются неотъемлемым оборудованием в авиации. Два гироскопа устанавливаются на крыльях самолета, благодаря чему можно получать информацию о его повороте вокруг вертикальной оси. Распространенные сейчас беспилотники имеют три гироскопа, без которых управление летательным аппаратом и его точное балансирование было бы невозможным.
Распространенные сейчас беспилотники имеют три гироскопа, без которых управление летательным аппаратом и его точное балансирование было бы невозможным.
Наличие гироскопа обязательно для нормального функционирования навигационных систем. Такие датчики многократно увеличивают фактическую точность определения координат с погрешностью в несколько сантиметров. Дело в том, что навигация по спутниковому сигналу в определенных условиях работает хуже или полностью отказывает. В таком случае ориентация в пространстве возможна только с помощью гироскопа. Это в первую очередь наблюдается при нахождении под землей, под водой или в космосе. Комбинирование спутниковых и гироскопических систем дает возможность добиться максимальной точности определения местоположения движущихся объектов.
Гироскоп является не только полезным, но и интересным устройством, принцип работы которого был внедрен в производство нескольких видов детских игрушек. Примером этого является йо-йо, волчок, спиннер, кистевой гироскопический тренажер. В данном случае ценится качество устройства удерживаться в определенном положении благодаря вращению по главной оси. Что касается свойства гироскопа выступать в качестве датчика, то оно применяется при изготовлении вертолетов на радиоуправлении, квадрокоптеров.
Применение гироскопа в мобильных устройствах, планшетах и прочей портативной техникиВ мобильной технике гироскоп применяется благодаря его свойству реагировать на изменение углов ориентации тела. Прибор выступает в качестве датчика, позволяющего определить, что мобильный телефон или планшет был повернут в ту или иную сторону. Наличие устройства позволяет получить информацию об изменении положения тела в 3 плоскостях. Внедренные в гаджеты гироскопы внешне напоминают миниатюрную микросхему.
Благодаря присутствию гироскопа в мобильном телефоне, в том удалось реализовать функцию управления встряхиванием. Особенно полезным датчик является для реализации управления в играх, в частности гонках.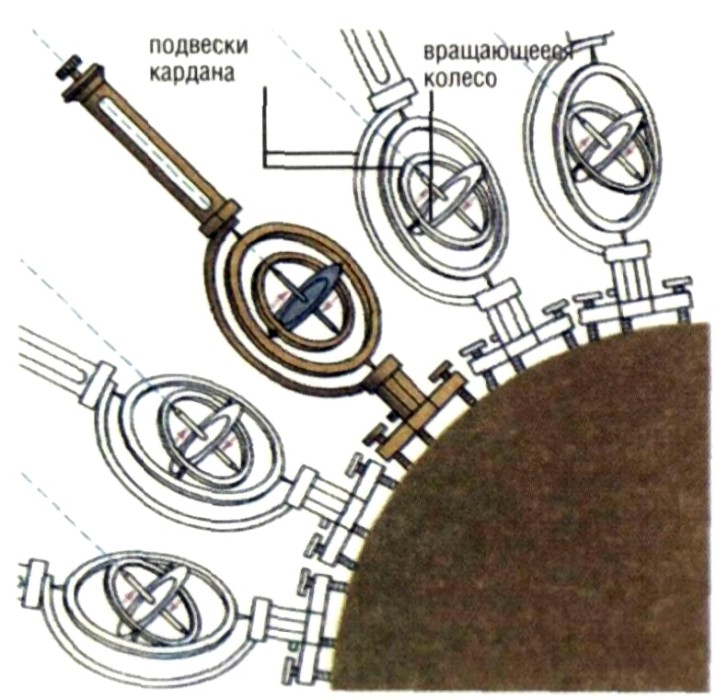 При повороте экрана девайса осуществляется управление автотранспортом без необходимости нажатия на кнопки.
При повороте экрана девайса осуществляется управление автотранспортом без необходимости нажатия на кнопки.
Весьма похожим устройством на гироскоп является акселерометр. Последний позволяет определять повороты тела относительно его оси. При этом функционал гороскопа гораздо обширнее.
Он позволяет:
- Определить перемещение в пространстве.
- Указывать стороны света как компас.
- Дает информацию для расчета скорости движения.
Наличие гироскопа позволяет решать те задачи, которые мог бы выполнять акселерометр. При этом использование акселерометра никогда не позволит сделать все то, что возможно с помощью гироскопа. Несмотря на схожесть датчиков, они часто используются в паре, особенно в мобильной технике, смарт-часах, планшетах и т.д. Работая вместе, они позволяют значительно быстрее получать различную информацию по перемещению устройств, что увеличивает скорость ее обработки. Это важно для мобильных игр, квадрокоптеров, гироскутеров.
Похожие темы:
инструкция, схемы и примеры использования [Амперка / Вики]
Используйте гироскоп для определения угловой скорости вокруг собственных осей X, Y, Z.
Модуль пригодиться для стабилизации летательного аппарата по самолётным углам: тангаж, крен и рысканье. Гироскоп совместно с акселерометром применяется для отслеживания угла поворота в современном смартфоне.
Видеообзор
Гироскоп в обзоре IMU-модуля.
Пример работы для Arduino и XOD
В качестве мозга для считывания показаний с датчика рассмотрим платформу из серии Arduino, например, Uno.
На аппаратном уровне инерционный модуль общается с управляющей электроникой по шине I²C. Но не переживайте о битах и байтах: используйте библиотеку TroykaIMU и на выходе получите готовы данные.
Схема устройства
Вывод данных
В качестве примера выведем в Serial-порт угловую скорость вокруг собственных осей X, Y, Z.
- gyro-read-data.ino
// Библиотека для работы с модулями IMU #include <TroykaIMU.h> // Создаём объект для работы с гироскопом Gyroscope gyroscope; void setup() { // Открываем последовательный порт Serial.begin(9600); // Выводим сообщение о начале инициализации Serial.println("Gyroscope begin"); // Инициализируем гироскоп gyroscope.begin(); // Выводим сообщение об удачной инициализации Serial.println("Initialization completed"); } void loop() { // Выводим угловую скорость в градусах в секунду относительно оси X Serial.print(gyroscope.readRotationDegX()); Serial.print("\t\t"); // Выводим угловую скорость в градусах в секунду относительно оси Y Serial.print(gyroscope.readRotationDegY()); Serial.print("\t\t"); // Выводим угловую скорость в градусах в секунду относительно оси Z Serial.print(gyroscope.readRotationDegZ()); Serial.print("\t\t"); Serial.println(); delay(100); }
Пример для Espruino
В качестве мозга для считывания показаний с датчика рассмотрим платформы из серии Espruino, например, Iskra JS.
Схема устройства
Вывод данных
В качестве примера выведем в консоль угловую скорость гироскопа вокруг собственных осей X, Y, Z.
- gyro-read-data.js
Пример для Raspberry Pi
В качестве мозга для считывания показаний с датчика рассмотрим одноплатные компьютеры Raspberry Pi, например, Raspberry Pi 4.
Схема устройства
Для быстрой сборки и отладки устройства возьмите плату расширения Troyka Cap, которая надевается сверху на малину методом бутерброда.
Программная настройка
Вывод данных
А написать пример кода для Raspberry Pi оставим вам домашним заданием.
Элементы платы
Гироскоп на I3G4250D
Гироскоп выполнен на чипе I3G4250D и представляет собой миниатюрный датчик перемещений в трёхмерном пространстве, разработанный по технологии MEMS от компании STMicroelectronics. Адрес устройства по умолчанию равен 0x68, но может быть изменен на 0x69. Подробности читайте в разделе смена адреса модуля.
Адрес устройства по умолчанию равен 0x68, но может быть изменен на 0x69. Подробности читайте в разделе смена адреса модуля.
Регулятор напряжения
Линейный понижающий регулятор напряжения NCP698SQ33T1G обеспечивает питание MEMS-чипа и других компонентов сенсора. Диапазон входного напряжения от 3,3 до 5 вольт. Выходное напряжение 3,3 В с максимальным выходным током 150 мА.
Преобразователь логических уровней
Преобразователь логических уровней PCA9306DCT необходим для сопряжения датчика с разными напряжениями логических уровней от 3,3 до 5 вольт. Другими словами сенсор совместим как с 3,3 вольтовыми платами, например, Raspberry Pi, так и с 5 вольтовыми — Arduino Uno.
Troyka-контакты
Датчик подключается к управляющей электронике через две группы Troyka-контактов:
Питание (V) — соедините с рабочим напряжением микроконтроллера.
Земля (G) — соедините с землёй микроконтроллера.
Сигнальный (D) — пин данных шины I²C. Подключите к пину SDA микроконтроллера.
Сигнальный (C) — пин тактирования шины I²C. Подключите к пину SCL микроконтроллера.
Смена адреса модуля
Иногда в проекте необходимо использовать несколько гироскопов. Для этого на модуле предусмотрены контактная площадка. Для смена адреса капните каплей припоя на отведённую контактную площадку.
| Модуль | Адрес без перемычки | Адрес с перемычкой |
|---|---|---|
| Гироскоп | 0x68 | 0x69 |
Принципиальная и монтажная схемы
Габаритный чертёж
Характеристики
MEMS-датчик: гироскоп I3G4250D
Интерфейс: I²C
I²C-адрес:
Максимальная чувствительность: 8,7×10-3 °/с
Диапазон измерений: ±250 / ±500 / ±2000 °/с²
Напряжение питания: 3,3–5 В
Потребляемый ток: до 10 мА
Размеры: 25,4×25,4×10,1 мм
Ресурсы
Улитка гироскопических инноваций
Инновационные циклы в гироскопостроении длятся сорок-пятьдесят лет, причем смена одного на другой происходит только после серьезного прорыва в физике и технологиях.
Инерциальные системы навигации — вершина развития систем навигации с древнейших времен. В основе инерциальной навигации лежат простые соображения: измеряя ускорение движения, можно путем его интегрирования вычислять скорость, а интегрированием скорости можно определять текущее местоположение (координаты) движущегося объекта.
Ускорение — векторная величина, которая имеет не только численное значение, но и направление. Следовательно, система датчиков, определяющая ускорение, должна измерять и его величину, и его направление. Величину ускорения определяет специальный прибор — акселерометр, который был изобретен в конце XIX века для установки в автомобилях и паровозах с целью контроля скорости их движения. Информацию о направлении движения объекта дают гироскопы, обеспечивающие опорную систему координат для акселерометров.
Полтора века гироскопии
В то время как устройство акселерометров принципиально не менялось с момента их создания, гироскопы за последние сто пятьдесят лет прошли в своем развитии четыре больших этапа принципиальных преобразований, каждый из которых непосредственно связан с историей развития физики и технологий.
Столь длительный цикл не случаен. Создание гироскопов, их доведение до уровня промышленных образцов — это длинный путь, двадцать, а то и тридцать лет. Не приходится ожидать, что кто-то вдруг придумает новый тип гироскопа, тут же запустит его в производство и всех опередит. Цикл жизни таких изделий тоже очень длинный: затраты на их разработку очень велики, и, пока они не окупятся, никто и не будет спешить что-то менять в системах, где они используются. А предшествующая разработка теоретических основ гироскопии потребовала еще больше времени.
Этот гирокомпас использовался во Второй мировой войне для управления полетом ракет «Фау-2»
Фотография: gettyimages.
Первый этап — это классический механический гироскоп, который был изобретен французским физиком Жаном Бернаром Леоном Фуко в середине XIX века. Первые промышленные образцы появились в конце XIX века — австрийский инженер Людвиг Обри применил гироскоп для стабилизации курса торпеды.
Хотя детская игрушка — волчок, изучение поведения которого легло в основу теории гироскопов, — известна с древнейших времен, создание гироскопа стало возможным только после серьезного развития классической механики и ее математического аппарата, что заняло значительную часть XVIII и XIX веков. В основу теории гироскопов легли труды многих величайших ученых — от Ньютона и Эйлера до Ковалевской и Жуковского. Одновременно, во многом на основе тех же теоретических достижений, развивались технологии точной обработки металлов, появилось современное металлорежущее оборудование, без которого изготовление гироскопов невозможно.
Второй этап развития гироскопии — это кольцевые лазерные гироскопы (КЛГ). Их создание стало возможным только после длительного периода развития квантовой электроники, занявшего почти весь ХХ век. В ее основе лежат труды творцов современной физики, начиная с Эйнштейна и заканчивая создателями первых квантовых генераторов — Прохоровым, Басовым, Таунсом. В нашей стране их начали разрабатывать еще в 1970-е, а пик применения — это уже 2000 годы. Создание лазерных гироскопов стало возможным благодаря появлению прецизионных методов механической и физической обработки различных материалов, в первую очередь зеркальных стекол. Шероховатость их поверхности — пять ангстрем — это уже на уровне размера атома. А радиус кривизны такого зеркала составляет семь метров при размере два сантиметра.
Изобретение гироскопа стало результатом изучения поведения древнейшей детской игрушки — волчка
Третий этап развития гироскопии, пик которого приходится на наше время, — это использование в системах навигации волновых твердотельных гироскопов (ВТГ).
Наконец, четвертый этап развития гироскопии — это появление микроэлектромеханических систем, МЭМС, физические принципы работы которых такие же, как и у больших гироскопов, но изготавливаются они на основе технологий обработки кремния — тех же самых, что используются при изготовлении микросхем и сверхбольших интегральных схем (СБИС). В 1964 году компания Westinghouse выпустила первую серийную МЭМС — резонансный затворный транзистор. А английская компания Silicon Sensing произвела первый МЭМС-гироскоп в 1985 году. В переплетении спиралей развития физики и технологий механической обработки материалов появилась спираль электронных технологий1.
Механический гироскоп
В 1852 году французский физик, механик и астроном, будущий член Парижской академии наук и член-корреспондент Петербургской академии наук, Жан Бернар Леон Фуко описал созданный им прибор, который он назвал гироскопом (от греч. gyros — «круг», gyrou — «кружусь», «вращаюсь» и scopeo — «смотрю», «наблюдаю»). Как показал Фуко, с его помощью можно автономно определять направление движения объекта и его скорость.
Как уже было сказано, изобретение гироскопа стало в известном смысле результатом изучения поведения древнейшей детской игрушки — волчка. Если раскрутить волчок относительно оси симметрии, то выясняется, что он оказывает энергичное сопротивление попытке изменить положение оси вращения, его ось вращения устойчиво сохраняет свое положение при наклонах основания или толчках. Именно в силу этого свойства вращающийся волчок не падает, а его ось описывает конус вокруг вертикали; это движение называется регулярной прецессией тяжелого твердого тела. Можно показать, что ось волчка в конце концов устанавливается параллельно земной оси. Этим и объясняется применение «волчка» в гироскопах.
Именно в силу этого свойства вращающийся волчок не падает, а его ось описывает конус вокруг вертикали; это движение называется регулярной прецессией тяжелого твердого тела. Можно показать, что ось волчка в конце концов устанавливается параллельно земной оси. Этим и объясняется применение «волчка» в гироскопах.
В гироскопе Фуко ротор (волчок) был установлен в карданов подвес с вертикальной осью наружной рамки. Фуко указал на три возможности использования гироскопа:
-
если быстровращающийся ротор имеет три степени свободы, то его ось вращения сохраняет неизменную ориентацию в инерциальном пространстве, что позволяет с помощью такого прибора наблюдать вращение Земли;
-
если внутреннюю рамку жестко связать с наружной так, чтобы ось ротора могла поворачиваться лишь в горизонтальной плоскости, то эта ось стремится установиться в плоскость меридиана;
-
если наружную рамку жестко связать с корпусом, а внутренней рамке дать свободу вращения относительно ее оси и установить ось ротора в плоскость меридиана, то она стремится установиться параллельно оси вращения Земли.
Гироскопы за последние сто пятьдесят лет прошли в своем развитии четыре больших этапа принципиальных преобразований, каждый из которых непосредственно связан с историей развития физики и технологий
Свободно вращающийся гироскоп под воздействием внешней силы отклоняется не в направлении этой силы, а перпендикулярно ей — прецессирует. В авиации, например, это свойство позволяет судить о движении самолета в пространстве в отсутствие ориентиров. Прецессия возникает, например, если крыло самолета, в котором установлен гироскоп, начинает крениться. Тогда пилот на приборной доске видит угол поперечного крена, что очень важно, если нет никаких ориентиров. Кроме того, он видит продольный крен, от носа до хвоста.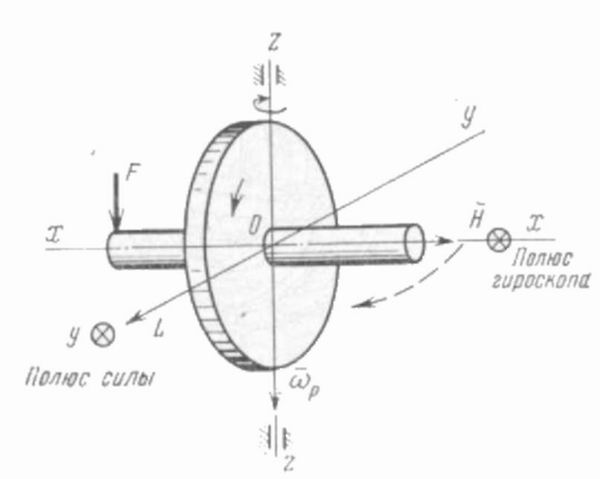 Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолета), то может функционировать как автопилот, то есть автоматически поддерживать самолет на курсе.
Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолета), то может функционировать как автопилот, то есть автоматически поддерживать самолет на курсе.
Лазерный гироскоп
Действие лазерных гироскопов основано на эффекте Саньяка, названном по имени французского физика Жоржа Саньяка, который в 1913 году построил оптический интерферометр для измерения скорости вращения. Суть эффекта Саньяка в том, что во вращающейся системе координат время прохождения электромагнитной волны по замкнутому контуру отличается от времени его прохождения по такому же контуру в покоящейся системе координат и зависит еще и от направления вращения. Световой луч, создаваемый источником света, разделялся на две части, которые шли в противоположных направлениях по периметру платформы и попадали на интерферометр. По изменению интерференционной картинки можно было судить о скорости вращения системы.
Однако реализовать его в гироскопии стало возможным только после изобретения лазера. Впервые сообщение о возможности создания на основе лазеров принципиально новых измерительных приборов — лазерных гироскопов — было сделано в конце 1962 года будущим лауреатом Нобелевской премии Александром Прохоровым в Физическом институте АН СССР. Но еще за десять лет до появления первых лазеров в Советском Союзе Израиль Берштейн провел экспериментальные исследования эффекта Саньяка в радиодиапазоне по схеме, которая по существу соответствует современной архитектуре построения волоконно-оптических гироскопов. Предпосылок для перенесения этих исследований в оптический диапазон тогда еще не было, но приоритет Израиля Берштейна, предвосхитившего концепцию построения волоконно-оптического гироскопа, признают в России и в СШA.
Одновременно в 1962 году А. Розенталь (США) предложил, а В. Мацек и Д. Дэвис (США) реализовали первый He-Ne лазер с кольцевым резонатором (кольцевой лазер), с которого началось развитие лазерной гироскопии. А одну из первых моделей лазерного гироскопа продемонстрировала компания Lockheed Martin уже в середине 1960-х.
А одну из первых моделей лазерного гироскопа продемонстрировала компания Lockheed Martin уже в середине 1960-х.
Лазерный гироскоп называется кольцевым, поскольку луч в нем, отражаясь от зеркал, проходит по замкнутому контуру в форме квадрата или треугольника. По кольцевому контуру проходят два луча лазера в противоположных направлениях, навстречу друг другу. Если вся эта система лазера и зеркал неподвижна в инерциальной системе отсчета, то частоты обоих лучей, воспринимаемые детектором, будут одинаковы. Но если эта система будет вращаться вокруг оси, перпендикулярной плоскости траектории лучей, то измеряемые частоты лучей вследствие эффекта Доплера будут различаться. Причем тем сильнее, чем больше угловая скорость вращения. Ее можно определить по интерференционной картинке на детекторе.
Волновые твердотельные гироскопы (ВТГ)
В основе работы волновых твердотельных гироскопов лежит использование механических колебаний стенок сосудов, которые используются как резонаторы колебания. Хотя идея волнового твердотельного гироскопа зародилась в конце XIX века и была высказана английским ученым Дж. Х. Брайаном еще в 1892 году, реальные работы над ВТГ начались в 80-е годы ХХ века.
Брайан обратил внимание на то, что, если щелкнуть по бокалу, сделанному из хорошего хрусталя, он достаточно долго звенит и если его в это время поворачивать, то звон пульсирует. Наблюдая в микроскоп за краем бокала, он увидел, что при этом возникают изгибные колебания края бокала, которые представляют собой стоячую волну, и что при вращении бокала эта волна тоже вращается, но с меньшей скоростью. Брайан доказал, что вращение бокала относительно основания приводит к тому, что узлы колебаний на краю оболочки движутся с угловой скоростью (или скоростью прецессии), меньшей, чем скорость самой оболочки. Это явление по своим физическим основаниям сродни прецессии оси волчка. Из этого наблюдения и появилась идея ВТГ.
Хотя теория этого явления была во многом разработана к концу XIX столетия, должно было пройти еще полвека, прежде чем специалисты исследовательской компании Delco Wakefield в Массачусетсе заново открыли работу Брайана. В результате их разработок был создан современный ВТГ, который затем нашел практическое применение.
В результате их разработок был создан современный ВТГ, который затем нашел практическое применение.
Важную роль в разработке теории ВТГ сыграли ученые Института проблем механики имени А. Ю. Ишлинского РАН.
Как было сказано выше, ВТГ имеет форму полусферической оболочки, или бокала с жестко зафиксированной точкой крепления на основании полусферы. При ударе по верхнему ободку оболочки ободок полусферы приходит в движение и производит стоячую волну, которая резонирует на определенной частоте. Положение пучностей и узлов возникшей стоячей волны стабильно относительно оболочки, однако, если оболочка вращается вокруг опорной точки или стержня, стоячая волна отстает от физического вращения оболочки на определенный период. Например, если оболочка физически поворачивается на 90°, стоячая волна запаздывает на 27°. При вращении основания вокруг оси симметрии оболочки стоячая волна, возбужденная в резонаторе, начинает поворачиваться как относительно резонатора, так и относительно инерциального пространства. Зная угол поворота волны относительно резонатора, можно рассчитать угол поворота основания.
Создание механических гироскопов стало возможным только после серьезного развития классической механики и ее математического аппарата, что заняло значительную часть XVIII и XIX веков и появления современного металлорежущего оборудования
На внешнюю и внутреннюю поверхности резонатора, около рабочего края, напыляются металлические электроды, образующие вместе с такими же электродами, нанесенными на окружающий резонатор кожух, конденсаторы, которые служат для силового воздействия на резонатор с целью возбуждения колебаний и поддержания их постоянной амплитуды и позволяют замерять величину колебаний стенок резонатора.
Уникальность прибору обеспечивает множество параметров, в частности минимальное по сравнению с аналогами время готовности, максимально широкий динамический диапазон, высокая устойчивость к механическим воздействиям.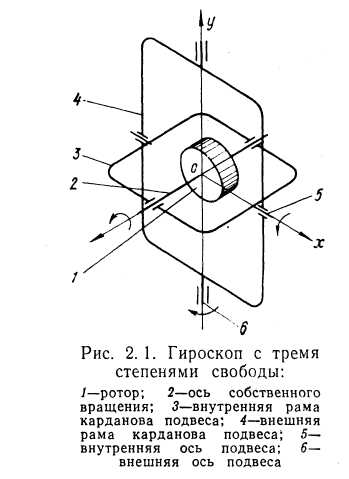
Микромеханические гироскопы
Вскоре после разработки первых микросхем возникла идея создания микромеханических систем по аналогичным технологиям. МЭМС-устройства изготавливают на кремниевой подложке аналогично технологии производства однокристальных интегральных микросхем, поэтому их размеры варьируются от нескольких десятков микрон до нескольких миллиметров.
Изготовление МЭМС очень похоже на создание микросхем. Здесь тоже используется кремний — самый популярный в микроэлектронике материал, а технология создания МЭМС-устройств очень напоминает процедуру создания интегральных схем. И в той и в другой есть
возможность создавать необходимые структуры в едином технологическом процессе.
Первыми по этой технологии были созданы датчики давления и ускорения. Массовое производство первого датчика давления, выполненного по МЭМС-технологии, было освоено компанией National Semiconductor в 1974 году, а начало производства МЭМС-датчиков давления и акселерометров для подушек безопасности автомобилей в мировом масштабе относится к началу 1990-х.
В середине 1980-х начались интенсивные поиски путей создания микроминиатюрных, дешевых, пригодных для крупносерийного производства гироскопов. В Британии это была, как мы уже упомянули, компания Silicon Sensing, во Франции — Sagem, а в США — Лаборатория им. Ч. Дрейпера. МЭМС-гироскопы, предназначенные для различных гаджетов, выпускаются сегодня миллионами штук фирмами разных стран.
В России исследования микромеханических гироскопов (ММГ) начались в конце 1990-х, и сейчас их выпускает ряд отечественных компаний.
Существуют МЭМС-гироскопы, работающие как ВТГ и как вибрационные гироскопы. Работа вибрационных гироскопов основана на свойстве камертона, заключающемся в стремлении сохранить плоскость колебаний своих ножек. Теория и эксперимент показывают, что в ножке колеблющегося камертона, установленного на платформе, вращающейся вокруг оси симметрии камертона, возникает периодический момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы.
Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы.
Лазерный гироскоп — навигационный прибор авиационной и космической промышленности производства Раменского приборостроительного завода
Фотография: visualrian.ru
В микромеханическом гироскопе вибрационного типа кремниевое кольцо свободно подвешено на изогнутых кремниевых пружинках, которые одним концом крепятся к неподвижной центральной шайбе. Когда на управляющие электроды подается напряжение, то под действием электростатических сил кольцо начинает вибрировать, возникает стоячая волна, которую отслеживают считывающие электроды. Если кольцо под действием внешних сил поворачивается, стоячая волна искажается, и сигнал о направлении поворота поступает на считывающие электроды. По величине искажений можно судить о скорости поворота.
Поскольку требования к точности и надежности гироскопов и систем навигации постоянно повышаются, в мире идут поиски путей создания гироскопов на новых принципах. Одно из направлений — так называемые квантовые гироскопы, в основу действия которых положены гироскопические свойства частиц: атомных ядер, электронов, фотонов и т. д. Так что можно ожидать, что мы (или наши потомки) будем наблюдать новые витки гироскопической спирали.
От астролябии до GPS
Люди с древнейших времен совершали дальние путешествия и нуждались в надежных средствах навигации для определения своих координат и направления движения, особенно в кораблевождении.
Уже в те далекие времена люди научились днем ориентироваться по Солнцу, а ночью по звездам. Древние мореходы — греки, финикийцы — для грубого определения своего местоположения и оценки широты замеряли угол между направлением на Полярную звезду и плоскостью местного горизонта.
Первым навигационным прибором стала астролябия — прибор для определения широты. Появилась она в Древней Греции, а окончательный вид приобрела в IV веке нашей эры. Ученые исламского Востока усовершенствовали астролябию. С XII века она становится известна и в Западной Европе.
Появилась она в Древней Греции, а окончательный вид приобрела в IV веке нашей эры. Ученые исламского Востока усовершенствовали астролябию. С XII века она становится известна и в Западной Европе.
В XVIII веке на смену астролябии приходит секстант, изобретенный в 1730 году независимо друг от друга английским математиком Джоном Хэдли и американским изобретателем Томасом Годфри. Это инструмент, используемый для измерения высоты Солнца и других космических объектов над горизонтом с целью определения географических координат точки, в которой производится измерение.
А в средневековом Китае изобрели магнитный компас — прибор, который после многовековых усовершенствований используется в навигации до сих пор.
Недостатки всех этих приборов известны: из-за многочисленных аномалий магнитного поля Земли и магнитных бурь магнитный компас —устройство весьма капризное, а звезды и Солнце в любой момент могут спрятаться в густом тумане или за тучами штормового неба.
Отсутствие аппаратуры, обеспечивающей получение точной информации о местоположении, стало особенно ощущаться в конце XIX — начале ХХ века и оказалось серьезным препятствием на пути развития мореходства, в том числе подводного, и авиации. Новые навигационные задачи возникали при строительстве подземных сооружений: шахт и метро.
Выходом стало создание автономных инерциальных навигационных систем (ИНС), ключевыми элементами которых являются акселерометры — приборы для определения ускорения и гироскопы разного типа2.
Инерциальная навигация — это метод определения координат объекта, основанный на известном физическом явлении — инерции тел. Проявляется это, в частности, в свойстве известной детской игрушки — волчка устойчиво сохранять положение своей оси вращения параллельно земной оси.
Главное достоинство ИНС — они автономны, то есть не требуют наличия внешних ориентиров или сигналов, поступающих извне.
Инерциальная навигация стала одним из важнейших направлений судостроения, авиационной и космической техники, атомного подводного флота. А соответствующая отрасль приборостроения — одной из самых наукоемких в промышленности. Ведь вся история рождения и становления инерциальной навигации основана на непосредственном использовании теоретической механики и фундаментальной математики при решении практических инженерных задач.
И поэтому не случайно технологиями, необходимыми для создания инерциальных навигационных систем самой высокой точности, которые используются в первую очередь в военной и космической технике, в мире в полном объеме сейчас владеют всего четыре страны — США, Франция, Россия и Китай.
В последние десятилетия получили развитие и стали неотъемлемой частью нашей жизни спутниковые системы навигации — GPS, ГЛОНАСС и другие. Датчики этих систем установлены не только на кораблях или самолетах, но и в автомобилях и почти во всех современных гаджетах, позволяя нам самим определять свое местоположение, равно как и следить за нами, что многих уже стало и раздражать.
Но развитие космических систем навигации не отменило использования инерциальных систем. Дело в том, что GPS, ГЛОНАСС и им подобные не покрывают всей поверхности Земли и тем более подземных сооружений и подводных объектов, а возможный выход этих систем или их составляющих из строя заставляет предусматривать наличие дублирующих автономных навигационных систем. Поскольку системы инерциальной навигации автономны, на их работе не сказываются погодные условия. Они не поддаются радиоэлектронному подавлению и обеспечивают скрытность использующих их объектов.
Важное направление развития современных навигационных систем — интеграция спутниковых (СНС) и инерциальных (ИСН) систем навигации, поскольку тем же современным летательным аппаратам не хватает точности, которую могут предоставить ИСН и СНС по отдельности.
Вот почему, несмотря на развитие космических систем навигации, инерциальные системы продолжают развиваться, а в последнее время даже очень интенсивно, к чему их подталкивает конкуренция с космическими средствами.
Гироскоп в версии 402 и выше
0 765 15 Августа, 2017
Роботы-пылесосы iCLEBO OMEGA стали использовать более точный и надежный гироскоп, который теперь не выносится за пределы материнской платы, а устанавливается прямо на ней. Ранее использовались гороскопы ST, с начала 2017 года все Омеги поставляются с высокоточным гироскопом Bosch. Новый гироскоп установлен в iCLEBO Omega с версией прошивки 402 и выше. Первые роботы выпускались в версии ПО 213.
Почему это важно? Дело в том, что iCLEBO Omega имеет треугольно-овальную форму, но не круглую, как предыдущая модель iCLEBO Arte. Из-за этого на больших территориях (от 100 кв. метров) роботы Omega могли накапливать ошибку навигации. Производитель принял максимально быстрые меры для устранения этого недочета и уже через пару недель после начала продаж, сделал отзыв роботов со старым типо гироскопа для замены его на новый тип. Для покупателей все выглядело следующим образом: где бы ни находился покупатель, приезжает курьер, забирает на 2-4 дня (в зависимости от дальности проживания от Москвы или другого ближайшего СЦ) и возвращает пылесос с обновленным гироскопом.
Некоторые технические особенности нового гироскопа Bosch. Разместили его на основной системной плате, переписав прошивку и ПО под новое устройство. Предыдущий гироскоп L3G4200D может работать в одном из 3-х режимов:
1 – Вращение со скоростью до 250 °/сек., с чувствительностью 8.75 mdps/digit
2 – Вращение со скоростью до 500°/сек., с чувствительностью 17.50 mdps/digit
3 – Вращение со скоростью до 2000°/сек. , с чувствительностью 70.00 mdps/digit
, с чувствительностью 70.00 mdps/digit
Режим работы задаётся программно, при инициализации устройств в момент включения. Чем меньше значение mdps/digit (millidegree per second / digit), тем выше чувствительность гироскопа. Соответственно, для максимальной чувствительности необходимо выбрать режим с минимальной предельно-допустимой скоростью вращения. По этому логично предположить, что гироскоп работает в режиме FS=250 dps (°/сек.), поскольку на большую скорость вращения конструкция робота просто не рассчитана и использование других режимов нецелесообразно. Кроме того, производитель заявляет допустимую погрешность измерений (отклонение нулевой точки) в режиме FS=250 dps до ±10°/сек. Чем быстрее скорость вращения, тем выше погрешность.
В новом гироскопе Bosch SMI130 доступно пять режимов работы: 125, 250, 500, 1000 и 2000 °/сек. Учитывая специфику устройства, предполагаем, что гироскоп работает в одном из первых двух режимов. Не исключено, что это FS=125 dps, т. к. даже такая предельно-допустимая скорость вращения не превышает конструкционных возможностей механической части робота, зато имеет максимальную чувствительность гироскопа. Производитель заявляет погрешность измерений (отклонение нулевой точки) в пределах ±0.5°/сек. Этот показатель в 20 раз превышает аналогичный параметр у L3G4200D. Вот основная причина использования нового гироскопа.
Кроме того, в документации SMI130, вместо параметра чувствительности, для каждого из режимов применен параметр Разрешение (Resolution), который измеряется в LSB/°/s (Least significant bit / °/ second). Здесь наоборот, чем больше разрешение, тем выше чувствительность. Для режима FS=250 dps разрешение составляет 131.2 LSB/°/s. Для FS=125 dps разрешение составляет 262.4 LSB/°/s. При конвертации mdps/digit в LSB/°/s получается, что максимальное разрешение у гироскопа STM L3G4200D в режиме FS=250 dps составляет 8.75 mdps/digit = 114.3 LSB/°/s. Это меньше, чем у Bosch SMI130 в аналогичном режиме, а при использовании режима FS=125 dps чувствительность SMI130 превышает L3G4200D более, чем в два раза. Есть ещё множество преимуществ использования нового гироскопа, но они малозначимы в контексте данного сравнения.
Есть ещё множество преимуществ использования нового гироскопа, но они малозначимы в контексте данного сравнения.
MEMS-акселерометры и гироскопы — разбираемся в спецификации / Хабр
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense. Когда все слова в отдельности понятны, но взаимосвязь их запутана до невозможности. Началось всё с параметра LSB, про который я только смутно помнила, что в переводе это Least Significant Bit. Дальше пошли “Resolution”, “Sensitivity”, а ещё дальше я поняла, что получающийся текст уже можно озаглавить “Datasheet для чайников”.Немного об основных блоках инерционного модуля.
MEMS-гироскоп
MPU-9250 состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z- осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации (, которое фиксируется емкостным датчиком. Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения [Время Электроники]. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения. Данный сигнал оцифровывается с помощью встроенного в плату 16-битного АЦП. Скорость оцифровки (sample rate) может программно варьироваться от 3.9 до 8000 выборок в секунду (samples per second, SPS), а задаваемые пользователем фильтры низких частот (LPF) предоставляют широкий диапазон возможных частот среза. ФНЧ нужен, в том числе, чтобы убирать вибрации от моторов (как правило, выше 20-25 Гц).
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси. Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
И сразу про трёхосевой MEMS-магнетометр
Основан на высокоточной технологии эффекта Холла. Включает в себя магнитные сенсоры, определяющие напряжённость магнитного поля земли по осям, схему управления, цепь усиления сигнала и вычислительную схему для обработки сигналов с каждого датчика. Каждый АЦП имеет разрешение 16 бит, диапазон измерений . Для измерения слабых магнитных полей применяют либо единицу в системе СИ микротесла (мкТл), либо гаусс (Гс, система СГС): , [Радиолоцман]).
Итак, что такое LSB и как его посчитать? Инструкция по добыче
Допустим, наш акселерометр сейчас работает в диапазоне измерений , то есть полный размах возможных значений будет . Соответствующие им значения напряжений оцифровываются 16-битным АЦП, который может разбить весь интервал максимально на ступеней. Минимальный инкремент, который можно засечь, — это как раз одна ступенька . Тут надо помнить, что счёт ведётся с нуля, так что на самом деле максимально измеряемое значение будет . То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом чувствительность (иногда называется масштабным коэффициентом, sensitivity scale factor) датчика на конкретном диапазоне будет определяться как соотношение электрического выходного сигнала и механического воздействия. Традиционно указывается для частоты сигнала 100 Гц и температуры Для MPU-9250 чувствительность составляет ступеней на каждые g или (, ), для другого IMU, BMI088 от Bosch Sensortec, чувствительность гироскопа высчитывается так же, а для акселерометра используется ступеней на каждое g.
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.
FS для акселерометров я брала ещё и из документации на BMI088 (см. ниже).
| Гироскоп, 16 бит | Акселерометр, 16 бит | ||
|---|---|---|---|
| Диапазон (FS), (dps) | LSB, (dps) | Диапазон (FS), g | LSB, mg |
| (FS = 250) | 0,004 | (FS = 4) | 0,06 |
| (FS = 500) | 0,008 | (FS = 6) | 0,09 |
| (FS = 1000) | 0,0015 | (FS = 8) | 0,12 |
| (FS = 2000) | 0,03 | (FS = 12) | 0,18 |
| (FS = 4000) | 0,06 | (FS = 16) | 0,24 |
| (FS = 24) | 0,37 | ||
| (FS = 32) | 0,48 | ||
| (FS = 48) | 0,73 | ||
Всё, вроде бы, встало на свои места, можно идти дальше. В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.
Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.
Какие бывают характеристики шума и откуда что берётся?
Источники шума можно в общем разбить на электронный шум схемы, преобразующей движение в сигнал напряжения (джонсоновский тепловой шум, дробовой шум, розовый 1/f фликкер-шум и т.д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы (собственной частоты колебаний сенсора ).
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Уровни шума можно определять несколькими способами. Можно рассматривать их во временной или частотной области (после преобразования Фурье). В первом случае берут остаточный шум как среднеквадратичное значение сигналов от неподвижного датчика (по факту это стандартное отклонение для выборки при ) за некоторый промежуток времени:
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение. Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Для белого шума отношение амплитуды (мгновенного пикового значения) к среднеквадратчному с вероятностью 99.9% составляет Называется такое отношение крест-фактором (crest factor, cross ratio). Можно выбрать вероятность 95.5% — крест фактор будет равен 4.
На деле же сигналы шума ведут себя не так хорошо и могут выдавать пики, увеличивающие крест-фактор до 10 раз. В некоторых спецификациях можно найти значения или сам множитель.
В узкой низкочастотной полосе 0.{-i n\omega t},dt = \begin{cases} \frac{1}{2}(a_n-ib_n), & n>0\\ \frac{a_0}{2}, & n=0\\ \frac{1}{2}(a_n + ib_n), & n<0 \end{cases} \end{equation}$$display$$
В общем случае эти коэффициенты представимы следующим образом: Амплитудным и фазовым спектром называют графики зависимости и от частоты. Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот: и имеет размерность Средняя нормированная мощность действительного сигнала будет Непериодические случайные сигналы (в частности, шум) можно описать как периодические в предельном смысле. Если стремится к бесконечности, последовательность импульсов превращается в отдельный импульс , число спектральных линий стремится к бесконечности, график спектра превращается в гладкий спектр частот Для данного предельного случая можно определить пару интегральных преобразований Фурье и где — Фурье-образ.Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю (), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Смотрим в спецификации — там на самом деле под именем спектральной плотности указан квадратный корень из неё с соответствующей размерностью или То есть значение RMS шума без указания полосы частот, на которой он считался (Bandwidth), бессмысленно.
Чуть подробнее про выбор полосы пропускания
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
Опуская технические подробности конфигурирования, можно сказать следующее. В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В таблицу режимов фильтра акселерометра добавилась колонка «Плотность шума» в , а “Bandwidth” колонка дополнилась значением “3dB”.
Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
Частота дискретизации + децимация -АЦП = скорость обновления данных (digital output data rate, ODR)
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8.714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
Согласно спецификации на MPU-9250, акселерометры снабжены сигма-дельта АЦП. Схемы на его основе потребляют минимальную мощность. Надо отметить, что полоса пропускания у данных преобразователей весьма узкая, не превышает звукового диапазона [Easyelectronics], но для штатного квадрокоптера больше и не нужно. Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал. В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
Для акселерометров MPU-9250 границы полосы пропускания определяются так, чтобы внутри диапазона спектральная плотность сигнала отличалась от пиковой (на частоте 0 Гц) не больше, чем на -3дБ. Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
.Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания. Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.
Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
Оценить разрешение для каждой полосы пропускания можно по пиковому шуму Среднеквадратичная величина шума на выходе связана с указанной в спецификации спектральной плотностью (а вернее, корнем из неё) и эквивалентной шумовой полосой пропускания (equivalent noise bandwidth, ENBW, — полоса пропускания эквивалентной системы, имеющей прямоугольную АЧХ и одинаковые с исходной системой значение на нулевой частоте и дисперсию на выходе, при воздействии на входы систем белого шума):
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра: Судя по исследованию в [MPU9250_DLPF], наш выбор 1.57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
| MPU-9250 | BMI088 | ||
|---|---|---|---|
| Гироскоп, 16 бит | |||
| Диапазон (FS), (dps) | Разрешение, бит (BW=92Hz) | Диапазон (FS), (dps) | Разрешение, бит (BW=64Hz) |
| 8 | |||
| 9 | 9 | ||
| 10 | 10 | ||
| 11 | 11 | ||
| 12 | 12 | ||
| Акселерометр | |||
| Диапазон (FS), g | Разрешение, бит | Диапазон (FS), g | Разрешение (по X,Y), бит |
| 6 | 8 | ||
| 7 | 9 | ||
| 8 | 10 | ||
| 9 | 11 | ||
И это лишь самые основные параметры.
Откуда что бралось:
- Самый приятный документ от Freescale Semiconductor — «How Many Bits are Enough?»
- [EE] — «Resolution vs Accuracy vs Sensitivity Cutting Through the Confusion»
- [Время электроники] — «МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы»
- [LSB] — «An ADC and DAC Least Significant Bit (LSB)»
- [Measurement Computing] — «TechTip: Accuracy, Precision, Resolution, and Sensitivity»
- [KIT] — «Акселерометры Analog Devices — устройство и применение»
- [Easyelectronics] — «Сигма-дельта АЦП»
- [Радиолоцман] — «Магнитометры: принцип действия, компенсация ошибок»
- [SO] — «Noise Measurement»
- [Mide] — «Accelerometer Specifications: Deciphering an Accelerometer’s Datasheet»
- [CiberLeninka] — Delta-Sigma ADC Filter
- [SciEd] — «Особенности реализации цифровой фильтрации с изменением частоты дискретизации»
- [MPU6050] — «Using the MPU6050’s DLPF»
- [MPU9250_DLPF] — MPU9250 Gyro Noise DLPF work investigation
- Understanding Sensor Resolution Specifications
- Siemens Digital Signal Processing
- МЭМС-датчики движения от STMicroelectronics
- [TMWorld] — «Evaluating inertial measurement units»
- [Sklyar] – Скляр Б. Цифровая связь. Теоретические основы и практическое применение.
суть, как устроен и для чего нужен
Однажды я наблюдал разговор двух друзей, точнее подруг:
А: О, знаешь, у меня новый смартфон, в нем есть даже встроенный гироскоп
Б: Аа, да, я тоже скачала себе, поставила гироскоп на месяц
А: Эмм, ты точно уверена, что это гироскоп?
Б: Да, гироскоп для всех знаков зодиака.
Чтобы таких диалогов в мире стало чуть меньше, предлагаем узнать, что такое гироскоп и как он работает.
Гироскоп: история, определение
Гироскоп – прибор, имеющий свободную ось вращения и способный реагировать на изменение углов ориентации тела, на котором он установлен. При вращении гироскоп сохраняет свое положение неизменным.
Само слово происходит от греческих gyreuо – вращаться и skopeo – смотреть, наблюдать. Впервые термин гироскоп был введен Жаном Фуко в 1852 году, но изобрели прибор раньше. Это сделал немецкий астроном Иоганн Боненбергер в 1817 году.
Гироскопы представляют собой вращающиеся с высокой частотой твердые тела. Ось вращения гироскопа может изменять свое направление в пространстве. Свойствами гироскопа обладают вращающиеся артиллерийские снаряды, винты самолетов, роторы турбин.
Простейший пример гироскопа – волчок или хорошо всем известная детская игрушка юла. Тело, вращающееся вокруг определенной оси, которая сохраняет положение в пространстве, если на гироскоп не действуют какие-то внешние силы и моменты этих сил. При этом гироскоп обладает устойчивостью и способен противостоять воздействию внешней силы, что во многом определяется его скоростью вращения.
Например, если мы быстро раскрутим юлу, а потом толкнем ее, она не упадет, а продолжит вращение. А когда скорость волчка упадет до определенного значения, начнется прецессия – явление, когда ось вращения описывает конус, а момент импульса волчка меняет направление в пространстве.
ВолчокВиды гироскопов
Существует множество видов гироскопов: двух и трехстепенные (разделение по степеням свободы или возможным осям вращения), механические, лазерные и оптические гироскопы (разделение по принципу действия).
Рассмотрим самый распространенный пример – механический роторный гироскоп. По сути это волчок, вращающийся вокруг вертикальной оси, которая поворачивается вокруг горизонтальной оси и в свою очередь закреплена в еще одной раме, поворачивающейся уже вокруг третьей оси. Как бы мы не поворачивали волчок, он всегда будет находится именно в вертикальном положении.
ГироскопПрименение гироскопов
Благодаря своим свойствам гироскопы находят очень широкое применение. Они используются в системах стабилизации космических аппаратов, в системах навигации кораблей и самолетов, в мобильных устройствах и игровых приставках, а также в качестве тренажеров.
Интересует, как такой прибор может поместиться в современный мобильный телефон и зачем он там нужен? Дело в том, что гироскоп помогает определить положение устройства в пространстве и узнать угол отклонения. Конечно, в телефоне нет непосредственно вращающегося волчка, гироскоп представляет собой микроэлектромеханическую систему (МЭМС), содержащую микроэлектронные и микромеханические компоненты.
Как это работает на практике? Представим, что вы играете в любимую игру. Например, гонки. Чтобы повернуть руль виртуального автомобиля не нужно нажимать никаких кнопок, достаточно лишь изменить положение своего гаджета в руках.
МЭМС датчикКак видим, гироскопы – удивительные приборы, обладающие полезными свойствами. Если вам понадобится решить задачу на расчет движения гироскопа в поле внешних сил, обращайтесь к специалистам студенческого сервиса, которые помогут вам справится с ней быстро и качественно!
Вопросы и ответы, связанные с датчиками в мобильных телефонах
Что такое датчик?
Датчик в мобильном телефоне — это компонент, который используется с целью распознавания изменений в окружающей среде (например, изменения яркости, магнитного поля, температуры и гравитации) и фиксации передвижений объектов (например, перемещения, встряхивания или поднятия телефона). Датчики конвертируют эти изменения в электронные сигналы, которые обрабатывает телефон.
Датчик мобильного телефона состоит из легко повреждаемых высокоточных деталей, чувствительных к источникам внешних помех. Старайтесь не ронять телефон и не подвергать его воздействию сильного магнитного поля, высокой влажности или экстремальных температур, чтобы не повредить датчики.
Самые распространенные датчики, которые устанавливаются в мобильных телефонах
1. Датчик освещенности
Функции: датчик освещенности фиксирует количество окружающего освещения, благодаря чему яркость экрана вашего телефона настраивается автоматически для того, чтобы обеспечить комфортное использование телефона и снизить нагрузку на глаза. Этот датчик поддерживает функцию автоматической настройки баланса белого во время фотосъемки. Кроме того, совместно с датчиком приближения, датчик освещенности помогает предотвратить случайные действия с телефоном, например, когда телефон находится в кармане.
Принцип работы: датчик создает сильный или слабый ток (в зависимости от количества света, которое он фиксирует) и сообщает телефону информацию о том, что нужно повысить или понизить яркость экрана. Обратите внимание, что, если вы используете неофициальное защитное стекло, датчик освещенности может быть закрыт, и это повлияет на его функционирование.
2. Датчик приближения
Функции: датчик приближения распознает другие предметы, которые находятся поблизости, не контактируя с ними. Благодаря датчику приближения экран вашего телефона автоматически выключается, когда вы подносите его близко к уху.
Принцип работы: датчик приближения состоит из инфракрасного светодиода и инфракрасного детектора. Обычно этот датчик располагается вверху экрана рядом с разговорным динамиком. Датчик определяет расстояние между телефоном и объектом, измеряя изменения сигналов инфракрасного света, который он получает. Рабочее расстояние датчика приближения обычно составляет 10 см.
3. Датчик гравитации (акселерометр)
Функции: этот датчик позволяет телефону автоматически менять ориентацию экрана между горизонтальной и вертикальной, считать количество пройденных шагов, использовать компас и распознавать жесты движения (например, жест взятия телефона или жест переворота телефона). С помощью датчика гравитации вы можете управлять движущимся мячом или гоночным автомобилем в играх, переключать композиции встряхиванием устройства, выключать мелодию звонка переворотом устройства и пр.
Принцип работы: датчик измеряет изменения емкостного сопротивления, вызванные движением по трем осям (X, Y, Z), и определяет текущее значение ускорения и замедления.
4. Гироскоп
Функции: гироскоп позволяет играть в игры, фиксирующие ваши движения, выполнять действия в играх движением телефона и служит для навигации, когда службы GPS недоступны. Гироскоп также применяется в виртуальной реальности, 3D-фотографии, 3D-навигации и т.д. (У некоторых моделей нет этого датчика).
Принцип работы: изначально гироскоп – это устройство, состоящее из быстро вращающегося колеса, установленного в рамку, которая позволяет колесу наклоняться в любом направлении. Импульс такого колеса заставляет его сохранять свое положение при наклоне каркаса, поэтому оно используется для измерения угла наклона и угловой скорости. Датчик, который работает по этому же принципу, применяется и в телефонах. Он способен одновременно определять местоположение, фиксировать движение и ускорение в шести направлениях.
5. Компас
Функции: датчик магнитного поля необходим для точного определения местоположения на карте и для обеспечения работы компаса в телефоне. (У некоторых моделей нет этого датчика).
Принцип работы: датчик магнитного поля измеряет силу и направление магнитного поля, фиксируя изменения электрического сопротивления анизотропного магниторезистивного материала, который находится внутри датчика. Иногда телефон нужно встряхнуть или повернуть, чтобы датчик магнитного поля работал корректно. Чтобы результаты измерений были максимально точными, старайтесь не располагать телефон вблизи объектов с сильным магнитным полем.
6. Датчик Холла
Функции: датчик Холла позволяет автоматически блокировать экран телефона, когда вы закрываете чехол-книжку, и разблокировать – когда открываете. (У некоторых моделей нет этого датчика).
Принцип работы: в датчике Холла на проводник подается ток. Когда проводник помещается в магнитное поле перпендикулярно направлению электронов, они отклоняются от прямой траектории. Как следствие, одна плоскость проводника становится отрицательно заряженной, а другая – положительно заряженной, в результате чего возникает разница в напряжениях. Обратите внимание, что на функции датчика может повлиять использование неофициального чехла-книжки, так как в этом случае может возникнуть магнитное склонение.
7. Барометр
Функции: барометр исправляет ошибки измерения высоты, чтобы снизить погрешность примерно до 1 метра, и работает совместно с датчиком GPS, чтобы определить местоположение, когда вы находитесь под мостом или внутри многоэтажного здания. (У некоторых моделей нет этого датчика).
Принцип работы: барометр состоит из реостата и конденсатора. Он измеряет атмосферное давление с помощью расчета изменений электрического сопротивления и емкости.
гироскопических датчиков – как они работают и что нас ждет впереди | о гироскопическом датчике | Техническая информация | Другая информация
Гироскопические датчики
Гироскопические датчики, также известные как датчики угловой скорости или датчики угловой скорости, представляют собой устройства, измеряющие угловую скорость.
| Угловая скорость |
|---|
| Проще говоря, угловая скорость – это изменение угла поворота в единицу времени. Угловая скорость обычно выражается в градусах в секунду (градусы в секунду). |
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
Типы гироскопических датчиков
Гироскопические датчикибывают разных типов. Здесь представлены разные типы по размеру и производительности.
В последние годы гироскопические датчики вибрации нашли свое применение, среди прочего, в системах обнаружения дрожания камеры для компактных видео- и фотоаппаратов, в датчиках движения для видеоигр и в системах электронного контроля устойчивости (противоскольжения) транспортных средств.
Ожидается, что в будущем спрос на гироскопы вибрации будет расти в таких областях, как системы безопасности и поддержки водителя транспортных средств, а также управление движением роботов.
Продукты с гироскопом EPSON
Автомобильный гироскоп
Стандартный гироскоп
Гироскопические датчики вибрации
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему элементу. По этой причине точность измерения угловой скорости значительно различается в зависимости от материала элемента и конструктивных отличий.Здесь мы кратко опишем основные типы элементов, используемых в вибрационных гироскопических датчиках.
Типы элементов, используемых в вибрационных гироскопических датчиках
Производители гироскопических датчиков вибрации используют различные материалы и конструкции, пытаясь разработать компактные высокоточные гироскопические датчики с хорошими характеристиками, в том числе:
• масштабный коэффициент
• температурно-частотный коэффициент
• компактный размер
• ударопрочность
• стабильность
• шумовые характеристики
Продукты с гироскопом EPSON
Автомобильный гироскоп
Стандартный гироскоп
Как работает определение угловой скорости (в датчиках вибрационного гироскопа)
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему объекту.
Здесь мы объясним, как это работает, на примере кристаллического элемента Epson с двойной Т-структурой.
Продукты с гироскопом EPSON
Автомобильный гироскоп
Стандартный гироскоп
Применение гироскопических датчиков
Гиродатчики имеют три основных применения.
| Измерение угловой скорости |
|---|
| Определите величину создаваемой угловой скорости. Используется для измерения самой величины движения. Пример) Проверка спортивного движения |
| Определение угла |
|---|
| Определяет угловую скорость, создаваемую собственным движением датчика. Углы обнаруживаются процессором посредством операций интеграции. Перемещенный угол передается в приложение и отражается в нем. Бывший.) Автомобильные навигационные системы Игровые контроллеры Сотовая связь |
| Механизмы управления |
|---|
| Определяет вибрацию, вызванную внешними факторами, и передает данные о вибрации в виде электрических сигналов на центральный процессор. Используется для корректировки ориентации или баланса объекта. Пример) Коррекция дрожания камеры Управление автомобилем |
Интересные факты
Примеры угловой скорости в приложениях:
• Автомобильные навигационные системы: ~ 10 град / с
• Управление транспортным средством: ~ 30 град / с
• Коррекция дрожания камеры: ~ 100 град / с
• Игровые контроллеры: ~ 300 град / с
• Определение движения лучших игроков в гольф: ~ 3000 град / с
Продукты с гироскопом EPSON
Автомобильный гироскоп
Стандартный гироскоп
Примеры приложений
Гироскопические датчики
используются во всех изделиях, которые нас окружают.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
– learn.sparkfun.com
Что такое гироскоп
Гироскопы или гироскопы – это устройства, которые измеряют или поддерживают вращательное движение. Гироскопы MEMS (микроэлектромеханические системы) – это небольшие недорогие датчики, измеряющие угловую скорость. Единицы угловой скорости измеряются в градусах в секунду (° / с) или оборотах в секунду (RPS).Угловая скорость – это просто измерение скорости вращения.
Гироскоп LPY503 на коммутационной плате. Гироскопы, аналогичные приведенному выше, могут использоваться для определения ориентации и используются в большинстве автономных навигационных систем. Например, если вы хотите сбалансировать робота, можно использовать гироскоп для измерения вращения из сбалансированного положения и отправки поправок на двигатель.
Основные понятия в этом руководстве
Перед тем, как углубиться в это руководство, вы можете прочитать некоторые из этих концепций, если вы с ними не знакомы.
Как работает гироскоп
Когда вещи вращаются вокруг оси, они имеют так называемую угловую скорость . Вращающееся колесо можно измерять в оборотах в секунду (RPS) или градусах в секунду (° / s).
Обратите внимание, что ось z гироскопа ниже совпадает с осью вращения колеса.
Если вы прикрепите датчик к колесу, показанному выше, вы можете измерить угловую скорость оси z гироскопа. Две другие оси не будут измерять вращение.
Представьте, если колесо вращается раз в секунду. У него будет угловая скорость 360 градусов в секунду. Также важно направление вращения колеса. По часовой стрелке вокруг оси или против часовой стрелки?
Трехосный гироскоп MEMS, подобный изображенному выше (ITG-3200), может измерять вращение вокруг трех осей: x, y и z. Некоторые гироскопы бывают одноосных и двухосных, но трехосный гироскоп в одном чипе становится меньше, дешевле и популярнее.
Гироскопычасто используются на объектах, которые совсем не вращаются очень быстро. Самолеты (надеюсь) не крутятся. Вместо этого они поворачиваются на несколько градусов по каждой оси. Обнаруживая эти небольшие изменения, гироскопы помогают стабилизировать полет самолета. Также обратите внимание, что ускорение или линейная скорость самолета не влияет на измерения гироскопа. Гироскопы измеряют только угловую скорость.
Как гироскоп MEMS определяет угловую скорость?
Внутренний вид гироскопического датчика MEMS
Датчик гироскопа внутри MEMS крошечный (от 1 до 100 микрометров, размером с человеческий волос).Когда гироскоп вращается, небольшая резонирующая масса смещается при изменении угловой скорости. Это движение преобразуется в электрические сигналы очень слабого тока, которые могут усиливаться и считываться микроконтроллером хоста.
Как подключиться к гироскопу
Основными аппаратными соединениями для использования гироскопа являются power и интерфейс связи . Как всегда, обратитесь к таблице данных датчика за всей информацией о технических характеристиках и примерах соединений.
Интерфейс связи
Гироскопымогут иметь цифровой интерфейс связи или аналоговый .
Гироскопы с цифровым интерфейсом обычно используют протоколы связи SPI или I2C. Использование этих интерфейсов позволяет легко подключиться к микроконтроллеру хоста. Одним из ограничений цифрового интерфейса является максимальная частота дискретизации. I2C имеет максимальную частоту дискретизации 400 Гц. SPI, с другой стороны, может иметь гораздо более высокую частоту дискретизации.
Гироскопы с аналоговым интерфейсом представляют скорость вращения посредством переменного напряжения, обычно между землей и напряжением питания. Для считывания сигнала можно использовать АЦП на микроконтроллере. Аналоговые гироскопы могут быть менее дорогими, а иногда и более точными, в зависимости от того, как вы читаете аналоговый сигнал.
Мощность
ГироскопыMEMS обычно маломощные. Рабочие токи находятся в диапазоне мА, а иногда и мкА.Напряжение питания для гироскопов обычно составляет 5 В или меньше. Цифровые гироскопы могут иметь выбираемые логические напряжения или работать от напряжения питания. Для любого цифрового интерфейса не забудьте подключить линии от 5 до 5 В и от 3,3 до 3,3 В. Кроме того, гироскопы с цифровыми интерфейсами могут иметь режимы пониженного энергопотребления и сна, что позволяет использовать их в приложениях с батарейным питанием. Иногда это преимущество перед аналоговым гироскопом.
Как выбрать гироскоп
При выборе гироскопа необходимо учитывать множество спецификаций.Вот несколько наиболее важных полезных:
Диапазон
Диапазон измерения или диапазон полной шкалы – это максимальная угловая скорость, которую может прочитать гироскоп. Подумайте о том, что вы измеряете. Вам нужно измерить вращение проигрывателя, которое работает очень медленно, или вращающегося колеса, которое может быть очень быстрым?
Чувствительность
Чувствительность измеряется в мВ на градус в секунду (мВ / ° / с). Не позволяйте странному измерению этой ценности пугать вас.Он определяет, насколько изменяется напряжение при заданной угловой скорости. Например, если гироскоп указан с чувствительностью 30 мВ / ° / с, и вы видите изменение выходного сигнала на 300 мВ, вы повернули гироскоп со скоростью 10 ° / с.
Хорошее правило, которое следует запомнить: с увеличением чувствительности дальность действия уменьшается. Например, посмотрите техническое описание гироскопа LPY503 или любой гироскоп с выбираемым диапазоном:
Обратите внимание, что с большим диапазоном страдает чувствительность и вы получаете меньшее разрешение.
Смещение
Как и в случае с любым другим датчиком, измеряемые вами значения будут содержать некоторую погрешность или смещение. Вы можете увидеть смещение гироскопа, измерив выходной сигнал, когда гироскоп неподвижен. Хотя вы думаете, что видите 0 °, когда гироскоп неподвижен, вы всегда будете видеть небольшую ненулевую ошибку на выходе. Эти ошибки иногда называют дрейфом смещения или нестабильностью смещения. На смещение сильно влияет температура сенсора. Чтобы свести к минимуму источник этой ошибки, большинство гироскопов имеют встроенный датчик температуры.Таким образом, вы можете считывать температуру датчика и исправлять любые изменения, зависящие от температуры. Чтобы исправить эти ошибки, гироскоп должен быть откалиброван. Обычно это делается, удерживая гироскоп неподвижным и обнуляя все показания в вашем коде.
Идем дальше
К настоящему времени вы должны знать, как работает гироскоп, и иметь хорошую основу, чтобы начать работу с гироскопом в своем собственном проекте.
Ознакомьтесь с этими руководствами, в которых используются гироскопы:
Как датчик гироскопа работает в вашем смартфоне?
A Гироскоп можно понимать как устройство, которое используется для поддержания исходного направления или обеспечения устойчивости при навигации, стабилизаторы и т. Д.Точно так же в вашем смартфоне присутствует гироскоп или гироскопический датчик, который измеряет угловую скорость вращения и ускорение. Проще говоря, все эти мобильные игры, в которые мы можем играть, используя чувство движения на наших телефонах, планшетах и т. Д., Происходят благодаря Gyroscope Sense. Точно так же в смартфоне требуется возможность просмотра 360-градусных видео или фотографий. Фотография или видео перемещаются, когда мы перемещаем телефон из-за наличия гироскопа.
Типы датчиков гироскопа
Датчики гироскопа бывают разных видов и типов, имеют разные характеристики и размеры.
Источник изображения – EPSON
Применение гироскопа в смартфоне
Гироскоп в смартфоне предоставляет графический интерфейс, который позволяет пользователю выбирать меню и т. Д., Наклоняя телефон. Телефон можно слегка отклонить, чтобы перемещаться вверх и вниз по списку контактов. Это позволяет смартфону запускать заданные команды различными движениями. Например, можно встряхнуть телефон, чтобы заблокировать его.
- Ответить по телефону / открыть сайт
Гироскопический датчик в вашем телефоне позволяет ответить на звонок или открыть веб-сайт с помощью имеющихся команд, таких как вращение, легкое встряхивание телефона 2–3 раза и т. Д.
Стабилизация изображения – это одно из приложений гироскопа в вашем смартфоне, которое предотвращает дрожание руки, которое влияет на качество изображения. Это позволяет телефону записывать действия во время нажатия на кнопку спуска затвора, чтобы сделать снимки более четкими. Устраняет влияние вибрации как на фото, так и на видео.
В случае потери услуги или сети, в туннелях или подземных дорогах, GPS продолжает помогать ориентироваться в автомобиле с помощью гироскопа.
- Управляющая игра с датчиком движения
Компания Apple, выпустившая iPhone 4, сделала Gyroscope ядром motion gaming . Это позволяет разработчику управлять игрой с помощью обнаружения действий. Он позволяет вам использовать свой телефон в качестве рулевого колеса во время вождения автомобиля в игре, реактивного самолета и т. Д. Игра воспроизводит моменты, которые вы делаете с телефоном, и, следовательно, управляет играми с чувством движения.
Источник изображения – SEIKO EPSON
Реализации датчика гироскопа в мобильном приложении
- Как обсуждалось ранее, датчик гироскопа может обеспечивать выполнение ряда действий на основе различных наборов движений, выполняемых пользователем, таких как встряхивание телефона для отмены записанного содержимого. Датчик гироскопа
- отвечает за авторотацию экрана и просмотр на экране всякий раз, когда телефон поворачивается.
- Одна из самых больших реализаций гироскопа заключается в том, что он обеспечивает плавное вращение и выполнение нескольких команд в играх с помощью трехмерных движений. Гироскоп
- может обеспечивать точное движение внутри функциональности приложения. Это позволяет пользователю выполнять большинство задач с помощью движения самого устройства. Гироскоп
- фиксирует 6-мерное угловое движение.Это просто означает, что мобильные приложения, разработанные с использованием датчика гироскопа, с большей вероятностью обеспечат привлекательный пользовательский интерфейс, чем приложение без датчика.
Приложения в смартфоне с датчиком гироскопа
Сегодня большинство приложений в смартфоне работают лучше всего, когда в телефоне есть датчик гироскопа. Например, недавно популярная игра Pokemon Go показала, как дополненная реальность добавляет впечатлений от игры, однако, что интересно, AR не будет возможна без гироскопического датчика.Если в вашем телефоне нет хорошего гироскопического датчика, его можно включить с помощью модуля GyroEmu Xposed на любом телефоне Android.
Android-приложения, которые наилучшим образом используют гироскопический датчик
Android-приложения, которые наилучшим образом используют гироскопический датчик:
приложений для iPhone, которые наилучшим образом используют гироскопический датчик
iPhone Приложения, которые наилучшим образом используют гироскопический датчик
С каждым днем появляется все больше и больше приложений, творчески использующих гироскопические датчики. Тем не менее, много инноваций делается в области расширенной готовности с гироскопом в смартфонах.Мы очень рады видеть, что будет дальше!
Лучшие смартфоны с датчиком гироскопа
Поскольку сегодня датчик гироскопа является неотъемлемой частью каждого смартфона, ниже приведены некоторые из лучших смартфонов с датчиком гироскопа, которые вы можете получить.
Гироскоп| Определение, физика и использование
Гироскоп , устройство, содержащее быстро вращающееся колесо или циркулирующий луч света, которое используется для обнаружения отклонения объекта от его желаемой ориентации.Гироскопы используются в компасах и автопилотах кораблей и самолетов, в управляющих механизмах торпед и в инерционных системах наведения, устанавливаемых в космических ракетах-носителях, баллистических ракетах и орбитальных спутниках.
гироскопТрехкадровый гироскоп.
Encyclopædia Britannica, Inc.Механические гироскопы
Механические гироскопы основаны на принципе, открытом в 19 веке Жаном-Бернаром-Леоном Фуко, французским физиком, который дал название гироскопу колесу или ротору, установленному в карданных кольцах.Угловой момент вращающегося ротора заставлял его сохранять свое положение даже при наклоне карданного вала. В 1850-х годах Фуко провел эксперимент с использованием такого ротора и продемонстрировал, что вращающееся колесо сохраняет свою первоначальную ориентацию в космосе независимо от вращения Земли. Эта способность подсказала ряд применений гироскопа в качестве указателя поворота, и в 1908 году немецкий изобретатель Х. Аншютц-Кемпфе разработал первый работоспособный гирокомпас для использования в подводных аппаратах.В 1909 году американский изобретатель Элмер А. Сперри построил первого автопилота, использовавшего гироскоп для удержания самолета на курсе. Первый автопилот для кораблей был установлен на датском пассажирском судне немецкой компанией в 1916 году, и в том же году гироскоп был использован при проектировании первого искусственного горизонта для самолетов.
(слева) Трехкадровый гироскоп и (справа) двухкадровый гироскоп.
Британская энциклопедия, Inc. Гироскопыиспользовались для автоматического рулевого управления, а также для коррекции поворота и тангажа крылатых и баллистических ракет со времен Второй мировой войны, когда были выпущены немецкие ракеты Фау-1 и Фау-2.Также во время той войны способность гироскопов определять направление с большой степенью точности в сочетании со сложными механизмами управления привела к разработке стабилизированных оружейных прицелов, бомбовых прицелов и платформ для переноски пушек и радиолокационных антенн на борту кораблей. Для инерциальных систем наведения, используемых на орбитальных космических аппаратах, требуется небольшая платформа, которая стабилизируется с необычайной степенью точности; это все еще делается с помощью традиционных гироскопов. Более крупные и тяжелые устройства, называемые импульсными колесами (или реактивными колесами), также используются в системах ориентации некоторых спутников.
гирокомпасНаправление, на которое указывает гирокомпас, не зависит от магнитного поля Земли и зависит от свойств гироскопа и от вращения Земли.
Encyclopædia Britannica, Inc.Оптические гироскопы
Оптические гироскопы практически без движущихся частей используются в коммерческих авиалайнерах, ракетах-носителях и орбитальных спутниках. Такие устройства основаны на эффекте Саньяка, впервые продемонстрированном французским ученым Жоржем Саньяком в 1913 году.В демонстрации Саньяка луч света разделялся таким образом, что часть его перемещалась по часовой стрелке, а часть – против часовой стрелки вокруг вращающейся платформы. Хотя оба луча перемещались по замкнутому контуру, луч, движущийся в направлении вращения платформы, вернулся в исходную точку несколько позже луча, движущегося в направлении, противоположном вращению. В результате была обнаружена картина «интерференции полос» (чередование светлых и темных полос), которая зависела от точной скорости вращения поворотного стола.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасГироскопы, использующие эффект Саньяка, начали появляться в 1960-х годах, после изобретения лазера и развития волоконной оптики. В кольцевом лазерном гироскопе лазерные лучи разделяются и затем направляются по противоположным путям через три взаимно перпендикулярных полых кольца, прикрепленных к транспортному средству. На самом деле «кольца» обычно представляют собой треугольники, квадраты или прямоугольники, заполненные инертным газом, через которые лучи отражаются зеркалами.Когда транспортное средство совершает поворот или движение по тангажу, интерференционные картины, созданные в соответствующих кольцах гироскопа, измеряются фотоэлементами. Затем образцы всех трех колец численно интегрируются, чтобы определить скорость поворота корабля в трех измерениях. Другой тип оптического гироскопа – это волоконно-оптический гироскоп, в котором нет полых трубок и зеркал, а свет проходит через тонкие волокна, плотно намотанные на небольшую катушку.
Кольцевой лазерный гироскоп.
Encyclopædia Britannica, Inc. Последняя редакция и обновление этой статьи выполняла Кара Роджерс, старший редактор.Узнайте больше в этих связанных статьях Britannica:
Датчики для Интернета
Используйте Generic Sensor API, чтобы получить доступ к датчикам на устройстве, таким как акселерометры, гироскопы и магнитометры.
• Обновлено
Сегодня данные датчиков используются во многих приложениях для конкретных платформ, что позволяет использовать такие варианты использования, как иммерсивные игры, отслеживание физической формы, а также дополненная или виртуальная реальность.Было бы здорово преодолеть разрыв между приложениями, ориентированными на платформу, и веб-приложениями? Откройте для себя API универсального датчика для Интернета!
Что такое API универсального датчика? #
Generic Sensor API – это набор интерфейсов, которые предоставляют сенсорные устройства веб-платформе. API состоит из базового интерфейса Sensor и набора конкретных классов датчиков, созданных на его основе. Наличие базового интерфейса упрощает процесс реализации и спецификации конкретных классов датчиков.Например, взгляните на класс Gyroscope . Он супер крошечный! Основные функции задаются базовым интерфейсом, а Gyroscope просто расширяет его тремя атрибутами, представляющими угловую скорость.
Некоторые классы датчиков взаимодействуют с реальными аппаратными датчиками, такими как, например, классы акселерометра или гироскопа. Они называются датчиками низкого уровня. Другие датчики, называемые датчиками слияния, объединяют данные от нескольких датчиков низкого уровня, чтобы предоставить информацию, которую в противном случае необходимо было бы вычислить сценарию.Например, датчик AbsoluteOrientation предоставляет готовую к использованию матрицу вращения четыре на четыре, основанную на данных, полученных от акселерометра, гироскопа и магнитометра.
Вы могли подумать, что веб-платформа уже предоставляет данные датчиков, и вы абсолютно правы! Например, события DeviceMotion и DeviceOrientation предоставляют данные датчика движения. Так зачем нам новый API?
По сравнению с существующими интерфейсами Generic Sensor API предоставляет большое количество преимуществ:
- Generic Sensor API – это платформа датчиков, которую можно легко расширить с помощью новых классов датчиков, и каждый из этих классов сохранит общий интерфейс.Клиентский код, написанный для одного типа датчика, может быть повторно использован для другого с очень небольшими изменениями!
- Датчик можно настроить. Например, вы можете установить частоту дискретизации, подходящую для вашего приложения.
- Вы можете определить, доступен ли датчик на платформе.
- Показания датчика имеют высокоточные временные метки, что обеспечивает лучшую синхронизацию с другими действиями в вашем приложении.
- Модели данных датчиков и системы координат четко определены, что позволяет поставщикам браузеров реализовывать совместимые решения.
- Интерфейсы на основе Generic Sensor не привязаны к DOM (это означает, что они не являются объектами
навигатораилиокна), и это открывает в будущем возможности для использования API в сервис-воркерах или его реализации в автономных средах выполнения JavaScript, таких как как встроенные устройства. - Аспекты безопасности и конфиденциальности являются высшим приоритетом для Generic Sensor API и обеспечивают гораздо лучшую безопасность по сравнению с более старыми API-интерфейсами датчиков. Есть интеграция с Permissions API.
- Автоматическая синхронизация с координатами экрана доступна для акселерометра
гироскопа,LinearAccelerationSensor,AbsoluteOrientationSensor,RelativeOrientationSensorиMagnetometer.
Совместимость с браузером #
Generic Sensor API поддерживается Google Chrome начиная с версии 67. Большинство браузеров на основе Chromium, таких как Microsoft Edge, Opera или Samsung Internet, также поддерживают этот API.Для других браузеров см. Могу ли я использовать. Обратите внимание, что API универсального датчика может быть полифиллированным.
Доступные общие API-интерфейсы датчиков #
На момент написания есть несколько датчиков, с которыми вы можете поэкспериментировать.
Датчики движения:
-
Акселерометр -
гироскоп -
LinearAccelerationSensor -
AbsoluteOrientationSensor -
RelativeOrientationSensor -
GravitySensor
датчики окружающей среды:
-
AmbientLightSensor(за флагом# enable-generic-sensor-extra-classesв Chromium.) -
Магнитометр(За флагом# enable-generic-sensor-extra-classesв Chromium.)
Обнаружение функций #
Обнаружение функций аппаратных API-интерфейсов является сложной задачей, поскольку вам необходимо определить, браузер поддерживает рассматриваемый интерфейс, и , имеет ли устройство соответствующий датчик. Проверить, поддерживает ли браузер интерфейс, несложно. (Замените Акселерометр любым другим интерфейсом, упомянутым выше.)
if («Акселерометр» в окне) {
} Для получения действительно значимого результата обнаружения функции вам также необходимо попытаться подключиться к датчику. Этот пример показывает, как это сделать.
пусть акселерометр = ноль;
попробуйте {
акселерометр = новый акселерометр ({частота: 10});
accelerometer.onerror = (event) => {
if (event.error.name === 'NotAllowedError') {
console.log ('Доступ к датчику запрещен.');
} else if (event.error.name === 'NotReadableError') {
console.log ('Невозможно подключиться к датчику.');
}
};
accelerometer.onreading = (e) => {
console.log (e);
};
accelerometer.start ();
} catch (error) {
if (error.name === 'SecurityError') {
console.log ('Создание датчика было заблокировано политикой разрешений.');
} else if (error.name === 'ReferenceError') {
console.log ('Датчик не поддерживается агентом пользователя.');
} else {
ошибка выброса;
}
} Polyfill #
Для браузеров, не поддерживающих Generic Sensor API, доступен polyfill.Полифилл позволяет загружать только соответствующие реализации датчиков.
импорт {Gyroscope, AbsoluteOrientationSensor} из './src/motion-sensors.js';
const гироскоп = новый гироскоп ({частота: 15});
const ориентация = новый AbsoluteOrientationSensor ({частота: 60});
Что это за датчики? Как я могу их использовать? #
Датчики – это область, в которой может потребоваться краткое введение. Если вы знакомы с датчиками, вы можете сразу перейти к разделу практического программирования.В противном случае давайте подробно рассмотрим каждый поддерживаемый датчик.
Акселерометр и датчик линейного ускорения #
Измерения датчика акселерометра Датчик акселерометра измеряет ускорение устройства, на котором размещен датчик, по трем осям (X, Y и Z). Этот датчик является инерционным датчиком, что означает, что, когда устройство находится в линейном свободном падении, общее измеренное ускорение будет 0 м / с 2 , а когда устройство лежит на столе, ускорение в направлении вверх (ось Z ) будет равняться силе тяжести Земли, т.е.е. g ≈ +9,8 м / с 2 , поскольку он измеряет силу стола, толкающего устройство вверх. Если вы толкнете устройство вправо, ускорение по оси X будет положительным или отрицательным, если устройство будет ускоряться справа налево.
Акселерометры могут использоваться для таких вещей, как подсчет шагов, определение движения или простая ориентация устройства. Довольно часто измерения акселерометра комбинируются с данными из других источников для создания термоядерных датчиков, таких как датчики ориентации.
Датчик LinearAccelerationSensor измеряет ускорение, прикладываемое к устройству, на котором установлен датчик, без учета силы тяжести. Когда устройство находится в состоянии покоя, например, лежа на столе, датчик будет измерять ускорение ≈ 0 м / с 2 по трем осям.
Датчик силы тяжести #
Пользователи уже могут вручную получать показания, близкие к показаниям датчика силы тяжести, вручную проверяя показания акселерометра и LinearAccelerometer , но это может быть обременительно и зависит от точности предоставленных значений. этими датчиками.Такие платформы, как Android, могут обеспечивать показания силы тяжести как часть операционной системы, что должно быть дешевле с точки зрения вычислений, обеспечивать более точные значения в зависимости от оборудования пользователя и быть более простым в использовании с точки зрения эргономики API. GravitySensor возвращает эффект ускорения вдоль осей X, Y и Z устройства, вызванный силой тяжести.
GravitySensor , как ожидается, будет поставляться в Chrome 91.
Гироскоп #
Измерения датчика гироскопа Датчик гироскопа измеряет угловую скорость в радианах в секунду вокруг местных осей X, Y и Z устройства.Большинство потребительских устройств имеют механические (MEMS) гироскопы, которые представляют собой инерционные датчики, которые измеряют скорость вращения на основе инерционной силы Кориолиса. Гироскопы MEMS склонны к дрейфу, вызванному гравитационной чувствительностью датчика, которая деформирует внутреннюю механическую систему датчика. Гироскопы колеблются на относительно высоких частотах, например, 10 кГц, и поэтому могут потреблять больше энергии по сравнению с другими датчиками.
Датчики ориентации #
Измерения абсолютного датчика ориентации Датчик AbsoluteOrientationSensor – это датчик слияния, который измеряет вращение устройства относительно системы координат Земли, а RelativeOrientationSensor предоставляет данные, представляющие вращение устройства, на котором размещены датчики движения, относительно в стационарную опорную систему координат.
Все современные фреймворки 3D JavaScript поддерживают кватернионы и матрицы вращения для представления вращения; однако, если вы используете WebGL напрямую, OrientationSensor удобно имеет как свойство кватерниона , так и метод populateMatrix () . Вот несколько фрагментов:
three.js
let torusGeometry = new THREE.TorusGeometry (7, 1.6, 4, 3, 6.3);
let material = new THREE.MeshBasicMaterial ({color: 0x0071c5});
пусть тор = новые ТРИ.Сетка (torusGeometry, материал);
scene.add (torus);
const sensorAbs = новый AbsoluteOrientationSensor ();
sensorAbs.onreading = () => torus.quaternion.fromArray (sensorAbs.quaternion);
sensorAbs.start ();
const sensorRel = новый RelativeOrientationSensor ();
пусть rotationMatrix = new Float32Array (16);
sensor_rel.onreading = () => {
sensorRel.populateMatrix (RotationMatrix);
torus.matrix.fromArray (RotationMatrix);
}; Датчик
Кат.Начало();
BABYLON
const mesh = new BABYLON.Mesh.CreateCylinder ('mesh', 0.9, 0.3, 0.6, 9, 1, scene);
const sensorRel = новый RelativeOrientationSensor ({частота: 30});
sensorRel.onreading = () => mesh.rotationQuaternion.FromArray (sensorRel.quaternion);
sensorRel.start (); WebGL
let modMatrix = new Float32Array ([1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1]) ;
const sensorAbs = новый AbsoluteOrientationSensor ({частота: 60}); Датчик
, абс.onreading = () => sensorAbs.populateMatrix (modMatrix);
sensorAbs.start ();
gl.uniformMatrix4fv (modMatrixAttr, false, modMatrix);
Датчики ориентации позволяют использовать различные варианты использования, такие как иммерсивные игры, дополненная и виртуальная реальность.
Дополнительные сведения о датчиках движения, расширенных вариантах использования и требованиях см. В документе с пояснением датчиков движения.
Синхронизация с координатами экрана #
По умолчанию показания пространственных датчиков разрешаются в локальной системе координат, которая привязана к устройству и не учитывает ориентацию экрана.
Система координат устройстваТем не менее, во многих случаях использования, таких как игры или дополненная и виртуальная реальность, требуется, чтобы показания датчика были разрешены в системе координат, которая вместо этого привязана к ориентации экрана.
Система координат экранаРаньше переназначение показаний датчика на координаты экрана нужно было реализовать в JavaScript. Такой подход неэффективен, а также значительно увеличивает сложность кода веб-приложения; веб-приложение должно отслеживать изменения ориентации экрана и выполнять преобразования координат для показаний датчиков, что нетривиально для углов Эйлера или кватернионов.
Generic Sensor API обеспечивает гораздо более простое и надежное решение! Локальная система координат настраивается для всех определенных классов пространственных датчиков: акселерометр , гироскоп , LinearAccelerationSensor , AbsoluteOrientationSensor , RelativeOrientationSensor и Magnetometer . Передавая опцию referenceFrame конструктору объекта датчика, пользователь определяет, будут ли возвращенные показания разрешены в координатах устройства или экрана.
const sensorRelDevice = new RelativeOrientationSensor ();
const sensorRelScreen = новый RelativeOrientationSensor ({referenceFrame: 'screen'});
Давайте кодируем! #
Generic Sensor API очень прост и удобен в использовании! Интерфейс датчика имеет методы start (), и stop (), для управления состоянием датчика и несколько обработчиков событий для получения уведомлений об активации датчика, ошибках и новых доступных показаниях.Конкретные классы датчиков обычно добавляют свои специфические атрибуты чтения к базовому классу.
Среда разработки #
Во время разработки вы сможете использовать датчики через localhost . Если вы разрабатываете для мобильных устройств, настройте переадресацию портов для локального сервера, и все готово!
Когда ваш код будет готов, разверните его на сервере, поддерживающем HTTPS. Страницы GitHub обслуживаются по протоколу HTTPS, что делает его отличным местом для публикации ваших демонстраций.
Вращение 3D-модели #
В этом простом примере мы используем данные с датчика абсолютной ориентации для изменения кватерниона вращения 3D-модели. Модель – это экземпляр класса three.js Object3D , который имеет свойство кватерниона . Следующий фрагмент кода из демонстрации ориентации телефона иллюстрирует, как датчик абсолютной ориентации может использоваться для поворота 3D-модели.
function initSensor () {
sensor = new AbsoluteOrientationSensor ({frequency: 60}); Датчик
.onreading = () => model.quaternion.fromArray (sensor.quaternion);
sensor.onerror = (event) => {
if (event.error.name == 'NotReadableError') {
console.log ('Датчик недоступен.');
}
};
sensor.start ();
} Ориентация устройства будет отражена во вращении 3D модели в сцене WebGL.
Punchmeter #
Следующий фрагмент кода извлечен из демонстрации перфоратора, иллюстрирующий, как датчик линейного ускорения может быть использован для расчета максимальной скорости устройства в предположении, что он изначально лежит неподвижно. .
this.maxSpeed = 0;
this.vx = 0;
this.ax = 0;
this.t = 0; this.accel.onreading = () => {
let dt = (this.accel.timestamp - this.t) * 0,001;
this.vx + = ((this.accel.x + this.ax) / 2) * dt;
let speed = Math.abs (this.vx);
if (this.maxSpeed <скорость) {
this.maxSpeed = скорость;
}
this.t = this.accel.timestamp;
this.ax = this.accel.x;
};
Текущая скорость рассчитывается как приближение к интегралу функции ускорения.
Измерение скорости удараВ некоторых случаях вам не требуется физическое устройство для работы с Generic Sensor API. Chrome DevTools отлично поддерживает имитацию ориентации устройства.
Имитация ориентации устройства с помощью Chrome DevToolsКонфиденциальность и безопасность #
Показания датчиков представляют собой конфиденциальные данные, которые могут подвергаться различным атакам со стороны вредоносных веб-страниц. Реализации API универсальных датчиков накладывают несколько ограничений для снижения возможных рисков безопасности и конфиденциальности.Эти ограничения должны быть приняты во внимание разработчиками, которые намерены использовать API, поэтому кратко их перечислим.
Только HTTPS #
Поскольку Generic Sensor API – это мощная функция, браузер разрешает ее только в безопасных контекстах. На практике это означает, что для использования Generic Sensor API вам потребуется доступ к своей странице через HTTPS. Во время разработки вы можете сделать это через http: // localhost, но для производства вам понадобится HTTPS на вашем сервере. См. Подборку «Надежно и надежно», чтобы узнать о лучших практиках и рекомендациях.
Интеграция политики разрешений #
Интеграция политики разрешений в Generic Sensor API контролирует доступ к данным датчиков для кадра.
По умолчанию объекты Sensor могут быть созданы только в пределах основного кадра или субкадров того же происхождения, что предотвращает несанкционированное считывание данных датчика фреймами iframe с перекрестными источниками. Это поведение по умолчанию можно изменить, явно включив или отключив соответствующие функции, управляемые политикой.
Приведенный ниже фрагмент иллюстрирует предоставление доступа к данным акселерометра iframe с разными источниками. Это означает, что теперь там можно создавать объекты Accelerometer или LinearAccelerationSensor .
Доставка показаний датчика может быть приостановлена #
Показания датчика доступны только на видимой веб-странице, т. Е. когда пользователь действительно с ним взаимодействует. Более того, данные датчика не будут предоставлены родительскому кадру, если фокус пользователя изменится на подкадр с перекрестным происхождением. Это предотвращает использование родительского фрейма пользовательского ввода.
Что дальше? #
Существует набор уже определенных классов датчиков, которые будут реализованы в ближайшем будущем, например, датчик внешней освещенности или датчик приближения; однако, благодаря большой расширяемости структуры Generic Sensor, мы можем ожидать появления еще большего количества новых классов, представляющих различные типы датчиков.
Еще одна важная область для будущей работы – это улучшение самого Generic Sensor API. Спецификация Generic Sensor в настоящее время является кандидатом в рекомендацию, что означает, что еще есть время для внесения исправлений и внедрения новых функциональных возможностей, необходимых разработчикам.
Вы можете помочь! #
Технические характеристики сенсора достигли уровня зрелости, являющегося кандидатом в рекомендации, поэтому отзывы разработчиков веб-сайтов и браузеров очень важны. Сообщите нам, какие функции было бы здорово добавить или есть ли что-то, что вы хотели бы изменить в текущем API.
Пожалуйста, не стесняйтесь сообщать о проблемах со спецификациями, а также об ошибках в реализации Chrome.
Resources #
Благодарности #
Эта статья была отрецензирована Джо Медли и Кейси Баскесом. Изображение героя сделано Миско через Wikimedia Commons.
Последнее обновление: Улучшить статьюПочему гироскоп важен для виртуальной реальности?
Почему гироскоп важен для виртуальной реальности?
С выпуском iPhone 4 был добавлен еще один удивительный датчик, известный как «гироскоп», который мгновенно стал успешным, так же как добавление «акселерометра» к первому iPhone стало важной вехой.Вопрос в том, зачем нам гироскоп? Каковы его последствия для виртуальной реальности? Давай выясним.
Гироскоп – движение против силы тяжести
Гироскоп определяется как устройство, которое использует силу земного притяжения для определения ориентации. Когда речь идет о смартфонах, это называется гироскопом. Они измеряют скорость вращения вокруг осей x, y и z устройства.
Например, мы обычно просматриваем изображение на нашем смартфоне вертикально, но когда мы нажимаем на кнопку поворота, что мы видим? Изображение поворачивается в горизонтальную ориентацию.Точно так же, играя в игру, мы касаемся пальцами экрана, чтобы прицелиться и направить игрока, чтобы он двигался вперед / назад, влево / вправо. Это явление является результатом встроенных в наши смартфоны гироскопических датчиков, которые постоянно отправляют информацию драйверу дисплея, чтобы изменить ориентацию телефона с книжной на альбомную или разрешить игроку перемещаться в разных направлениях.
Шесть степеней свободы
Объединение гироскопа, ускорителя и магнитометра еще больше обогатило впечатления от просмотра из виртуальной среды.Все эти датчики собраны вместе для достижения конечной цели – наилучшего просмотра, шести степеней свободы или 6DOF. То есть свобода передвижения, которую испытывает пользователь в трехмерном пространстве. 6DOF обычно представлен тремя перемещениями – вверх / вниз, вправо / влево, вперед / назад и тремя поворотами – тангажем, рысканием и креном.
Свобода передвижения, которую можно достичь в трехмерном пространстве, важна для виртуальной реальности, поскольку она позволяет более легко отслеживать перемещения пользователей и уровни интерактивности в среде.Представьте себе группу студентов, изучающих виртуальный тур по Тадж-Махалу. С помощью контроллера студенты могут перемещаться по всему помещению, двигаясь вперед и назад. Кроме того, они также могут вращать или двигать головой влево и вправо, чтобы получить панорамный вид на памятник.
Невозможно думать о виртуальной реальности без упоминания гироскопа, потому что он открыл новую волну взаимодействия и движения в виртуальном мире. Эта связь между устройством (гарнитурой VR) и эффектом (гироскопом) дала разработчикам огромные возможности для предоставления интерактивных и значимых впечатлений энтузиастам виртуальной реальности, новичкам и студентам.
Гироскоп – AWARE
Датчик гироскопа измеряет скорость или вращение в рад / с вокруг осей x, y и z устройства. Вращение положительное против часовой стрелки; то есть наблюдатель, смотрящий из некоторого положительного положения по оси x, y или z на устройство, расположенное в исходной точке, сообщит о положительном вращении, если устройство будет вращаться против часовой стрелки. Это стандартное математическое определение положительного вращения, которое не совпадает с определением крена, используемым датчиком ориентации.
Стандартные гироскопыпредоставляют необработанные данные о вращении без какой-либо фильтрации или коррекции шума и дрейфа (смещения). На практике шум и дрейф гироскопа вносят ошибки, которые необходимо компенсировать. Обычно вы определяете дрейф (смещение) и шум, отслеживая другие датчики, такие как датчик силы тяжести или акселерометр.
Система координат определяется относительно экрана телефона в его ориентации по умолчанию (лицом к пользователю). Оси не меняются местами при изменении ориентации экрана устройства. Ось X горизонтальна и направлена вправо, ось Y вертикальна и направлена вверх, а ось Z направлена к внешней стороне лицевой стороны экрана. В этой системе координаты за экраном имеют отрицательную ось Z. Кроме того, естественная ориентация устройства не всегда является книжной , поскольку естественная ориентация для многих планшетных устройств – альбомная . Дополнительную информацию можно найти в официальной документации по системе координат датчиков Android.
- Aware_Preferences. STATUS_GYROSCOPE : истина или ложь для активации или деактивации датчика акселерометра.
- Aware_Preferences. FREQUENCY_ GYROSCOPE : недетерминированная частота в микросекундах (зависит от возможностей и ресурсов аппаратного датчика). Вы также можете использовать константу задержки датчика SensorManager.
- Gyroscope.ACTION_AWARE_GYROSCOPE : новые данные, записанные в провайдере.
- Gyroscope.EXTRA_DATA : записанные данные в виде ContentValues.
- Gyroscope.EXTRA_SENSOR : информация датчика.
- Gyroscope.ACTION_AWARE_GYROSCOPE_LABEL : присвоить метку записанным данным.
- Gyroscope.EXTRA_LABEL : желаемая метка.
Датчик гироскопа
Содержит возможности аппаратного датчика мобильного устройства.
Датчик гироскопа.CONTENT_URI
content: //com.aware.provider.gyroscope/sensor_gyroscope
| Поле таблицы | Тип поля | Описание |
|---|---|---|
| _id | ЦЕЛОЕ | Первичный ключс автоматическим увеличением |
| метка времени | НАСТОЯЩИЙ | unixtime миллисекунд с 1970 года |
| device_id | ТЕКСТ | AWARE устройство UUID |
| double_sensor_maximum_range | НАСТОЯЩИЙ | Максимально возможное значение датчика |
| double_sensor_minimum_delay | НАСТОЯЩИЙ | Минимальная задержка выборки в микросекундах |
| имя_сенсора | ТЕКСТ | Название датчика |
| double_sensor_power_ma | НАСТОЯЩИЙ | Потребляемая мощность датчика в мА |
| double_sensor_resolution | НАСТОЯЩИЙ | Разрешение сенсора в единицах сенсора |
| тип_сенсора | ТЕКСТ | Тип датчика |
| датчик_вендор | ТЕКСТ | Производитель датчика |
| sensor_version | ТЕКСТ | Номер версии датчика |
Данные гироскопа
Содержит необработанные данные датчика.
Gyroscope_Data.CONTENT_URI
content: //com.aware.provider.gyroscope/gyroscope
| Поле таблицы | Тип поля | Описание |
|---|---|---|
| _id | ЦЕЛОЕ | Первичный ключс автоматическим увеличением |
| метка времени | НАСТОЯЩИЙ | unixtime миллисекунд с 1970 года |
| device_id | ТЕКСТ | AWARE устройство UUID |
| double_values_0 | НАСТОЯЩИЙ | значение оси X |
| double_values_1 | НАСТОЯЩИЙ | значение оси Y |
| double_values_2 | НАСТОЯЩИЙ | значение оси Z |
| точность | ЦЕЛОЕ | Уровень точности датчика (см. |