
Робота в Мостиськах | Careerjet
Фільтр
32 вакансій на відстані менше 25 км
KORMIL
- Яворів, Львівська Область
володіння загальними навичками ремонту для підтримки належного стану техніки в польових умовах знати і застосовувати призначення і техніко-експлуатаційні характеристики агрегатів.…
Контінентал Фармерз Груп
- Рудки, Львівська Область
Компанія Контінентал Фармерз Груп, сільськогосподарська компанія з міжнародними інвестиціями, запрошує на роботу: Вагаря-обліковця на елеватор Місце роботи: Львівська область, Са…
Контінентал Фармерз Груп
- Рудки, Львівська Область
Компанія Контінентал Фармерз Груп, сільськогосподарська компанія з міжнародними інвестиціями, запрошує на роботу Вагаря-обліковця на елеватор у м.
 Рудки , Самбірський р-н, Львівськ…
Рудки , Самбірський р-н, Львівськ…Фармастор
- Мостиська, Львівська Область
Ставка + % Дата публикации: 05.10.2021 Компания: Фармастор Контактное лицо: Ковтун Алена Телефон: Показать телефон Адрес: г.Мостиска Вид занятости: Полная з…
Veranda
- Мостиська, Львівська Область
- UAH 6,500-7,000 per month
Вимоги: Охайність, комунікабельність. Умови роботи: 2/2 Обов’язки: Обслуговування столиків, знання меню та ін. звертатись за номером тел.…
Контінентал Фармерз Груп
- Мостиська, Львівська Область
Контінентал Фармерз Груп, сільськогосподарська компанія з міжнародними інвестиціями, запрошує в свою команду: Комірника (с.
 Чуква, Самбірський р-н) Вимоги: Освіта вища або непо…
Чуква, Самбірський р-н) Вимоги: Освіта вища або непо…Дерев’яний дім, ТзОВ
- Яворів, Львівська Область
На виробництво дерев’яних піддонів (автоматична лінія по збірці піддонів) потрібний оператор лінії. Вимоги: – Чоловіки – Вік: до 45 років – Стаж роботи вітається. Робочий…
OKKO Group
- Яворів, Львівська Область
Є мільйони причин, чому ПРАЦЮВАТИ НА ОККО – ЗАВЖДИ ГАРНА ІДЕЯ. Але нам не вистачить часу, щоб перелічити усі, тому коротко розповімо тобі про найголовніше: ТУТ ВСЕ ОФІЦІЙНО. Бо я…
Zdoblew, ТМ
- Судова Вишня, Львівська Область
Запрошуємо жінок на роботу: формувальниця хлібобулочних виробів.
 Пропонуємо: після робочої зміни – 2 хліба безкоштовно безкоштовно торти до свят вчасна виплата заробітної плат…
Пропонуємо: після робочої зміни – 2 хліба безкоштовно безкоштовно торти до свят вчасна виплата заробітної плат…Біскотті, ТзОВ
- Яворів, Львівська Область
BISCOTTI – компанія, яка дає можливість отримувати моменти задоволення і насолоди життям кожний день. Компанія BISCOTTI оголошує про відкриття вакансії Кондитера Ваші основні о…
Нова державна служба України
- Яворів, Львівська Область
Кваліфікаційні вимоги Освіта – вища, за освітнім ступенем не нижче магістра Досвід роботи – досвід роботи на посадах державної служби категорій «Б» чи «В» або досвід служби в о…
Нова Мрія, ФГ
- Краковець, Львівська Область
ВИМОГИ Фермерське господарство яке розташоване в с.
 Глиниці Яворівського р-ну шукає на роботу людей які мають бажання працювати. Сумлінно та відповідально виконувати різну роботу…
Глиниці Яворівського р-ну шукає на роботу людей які мають бажання працювати. Сумлінно та відповідально виконувати різну роботу…Нова Мрія
- Яворів, Львівська Область
Вимоги: Фермерське господарство яке розташоване в с. Глиниці Яворівського р-ну, шукає людей які мають бажання працювати, сумлінно та відповідально виконувати різну роботу. Умови …
ГУДОК, ТОРГОВА МЕРЕЖА
- Мостиська, Львівська Область
8000 грн. Дата публикации: 25.08.2021 Компания: ГУДОК, ТОРГОВА МЕРЕЖА Контактное лицо: Гудок Анжела Телефон: Показать телефон Адрес: г.Мостиска Вид занятости:…
Нова державна служба України (НАДС)
- Яворів, Львівська Область
- UAH 4,670-4,760 per month
Повна назва посади: Провідний спеціаліст сектору з призначень відділу з питань призначення та виплати державної соціальної допомоги Структурний підрозділ: Управління соціального…
- Яворів, Львівська Область
Маршрут: Жовква, Рава Руська, Яворів, Новояворівськ, Пустомити, Мостиська, Краковець Вимоги: досвід роботи від 1 року на даному маршруту.
 Наявність авто Умови роботи: 5 ден…
Наявність авто Умови роботи: 5 ден…Нова державна служба України (НАДС)
- Яворів, Львівська Область
Повна назва посади: начальник відділу митного оформлення № 8 митного поста «Яворів» Львівської митниці Структурний підрозділ: Львівська митниця Кваліфікаційні вимоги: Освіт…
Нова державна служба України (НАДС)
- Яворів, Львівська Область
Повна назва посади: Начальник відділу соціальної підтримки пільгових категорій громадян та осіб з інвалідністю управління соціального захисту населення Яворівської районної державн…
Агросем
- Мостиська, Львівська Область
Дата публикации: 19.

Ощадбанк
- Мостиська, Львівська Область
#ZVISNO_ДОЛУЧАЙСЯ Прагнеш змін? Не довіряєш обіцянкам роботодавців? Хочеш долучитися до команди однодумців? Тоді тобі до нас! Ми – найбільший державний банк, який задає темп …
Наступна сторінка
Отримайте повідомлення на е-пошту щоб дізнатись про останні
Вакансії в Мостиськах
Недавно шукали:
Очистити історію пошуківБудь-яка вакансія
Мостиська (на відстані менше 25 км)
Перегляд документа #043f865f-9467-4fba-897d-191a915c2af0 | ЄДИНИЙ ДЕРЖАВНИЙ РЕЄСТР ДЕКЛАРАЦІЙ
Прізвище:
ОСЯДАЧ
По батькові (за наявності):
ЮЛІАНОВИЧ
Податковий номер:
[Конфіденційна інформація]
Серія та номер паспорта громадянина України (ID-картка):
[Конфіденційна інформація]
Унікальний номер запису в Єдиному державному демографічному реєстрі:
[Конфіденційна інформація]
Дата народження:
[Конфіденційна інформація]
Зареєстроване місце проживання:Країна:
Україна
Поштовий індекс:
[Конфіденційна інформація]
Місто, селище чи село:
Мостиська / Мостиський район / Львівська область / Україна
Тип:
[Конфіденційна інформація]
Назва:
[Конфіденційна інформація]
Номер будинку:
[Конфіденційна інформація]
Номер корпусу:
[Конфіденційна інформація]
Номер квартири:
[Конфіденційна інформація]
Місце фактичного проживання або поштова адреса, на яку Національне агентство з питань запобігання корупції може надсилати кореспонденцію суб’єкту декларування:Країна:
Україна
Поштовий індекс:
[Конфіденційна інформація]
Місто, селище чи село:
Мостиська / Мостиський район / Львівська область / Україна
Тип:
[Конфіденційна інформація]
Назва:
[Конфіденційна інформація]
Номер будинку:
[Конфіденційна інформація]
Номер корпусу:
[Конфіденційна інформація]
Номер квартири:
[Конфіденційна інформація]
Місце роботи:Місце роботи або проходження служби (або місце майбутньої роботи чи проходження служби для кандидатів):
Територіальне управління Служби судової охорони у Львівській області
Займана посада (або посада, на яку претендуєте як кандидат):
контролер підрозділу охорони
Категорія посади (заповніть, якщо це вас стосується):Тип посади:
[Не застосовується]
Категорія посади:
[Не застосовується]
Чи відноситесь ви до службових осіб, які займають відповідальне та особливо відповідальне становище, відповідно до статті 50 Закону України “Про запобігання корупції”?
Ні
Чи належить ваша посада до посад, пов’язаних з високим рівнем корупційних ризиків, згідно з переліком, затвердженим Національним агентством з питань запобігання корупції?
Ні
Чи належите Ви до національних публічних діячів відповідно до Закону України “Про запобігання та протидію легалізації (відмиванню) доходів, одержаних злочинним шляхом, фінансуванню тероризму та фінансуванню розповсюдження зброї масового знищення”?
Ні
Рінат Ахметов будує сухий порт навпроти станції Мостиська II
Навпроти залізничної станції Мостиська II почалося будівництво так званого сухого порту площею 36,5 га.
Що таке «сухий порт» та де його будуватимуть
Сухий порт – вантажний термінал на суходолі, який через автошляхи чи залізницю пов’язаний з морським портом. Його головне призначення – перевантаження морських вантажів на внутрішніх напрямках, окрім того такий порт може надавати послуги зі зберігання та митного оформлення товарів.
На Львівщині його почали будувати в лісі навпроти станції Мостиська II на території колишнього паливного складу, до якого прокладені дві залізничні гілки – європейського та (пост)радянського розміру. Звідти лише 7 км до станції «Медика» у Польщі. Також до бази є заїзд з боку автотраси Львів-Шегині.
Цей промисловий об’єкт раніше належав компанії «Фірма «Львів-Петроль», що входила до групи «Приват» Ігоря Коломойського та Геннадія Боголюбова, та перебував у заставі «ПриватБанку». Після того, як «ПриватБанк» став державним, він виставив старий склад на аукціон зі стартовою ціною 79,7 млн грн. Проте реалізувати його з першої спроби не вдалося, тож до других торгів вартість знизили до 31,89 млн грн. У підсумку базу продали за 31,92 млн грн, що лише на 20 тис. грн більше від початкової вартості.
Після того, як «ПриватБанк» став державним, він виставив старий склад на аукціон зі стартовою ціною 79,7 млн грн. Проте реалізувати його з першої спроби не вдалося, тож до других торгів вартість знизили до 31,89 млн грн. У підсумку базу продали за 31,92 млн грн, що лише на 20 тис. грн більше від початкової вартості.
За кілька місяців після аукціону, 18 вересня 2020 року Львівська ОДА припинила право постійного користування державною земельною ділянкою площею 36,5 га для «Львів-Петроль» і того ж дня передала її в оренду разом із під’їзними шляхами на 20 років ТОВ «Мостиська Драй Порт». Станом на початок березня 2021 року колишній склад пального також перебуває у власності цієї компанії.
Хто будує
ТОВ «Мостиська Драй Порт» (МДП) було зареєстроване на початку лютого 2020 року у селі Мостиська Другі зі статутним капіталом 35,4 млн грн. Засновниками МДП є киянин Олександр Примак (30%) та ТОВ «Лемтранс» (70%).
Майбутній сухий порт між залізничною станцією Мостиська ІІ та трасою «Львів-Шегині» (натисніть для збільшення картинки)
«Лемтранс» – найбільший приватний оператор на залізниці, який надає послуги з транспортування вантажів та ремонту рухомого складу. Група має 20 тис. вантажних вагонів та, згідно з даними Forbes Ukraine, 2019 року посіла 39 місце у топ-100 найбільших приватних компаній країни. «Лемтранс» є частиною холдингу СКМ найбагатшого українця Ріната Ахметова.
Група має 20 тис. вантажних вагонів та, згідно з даними Forbes Ukraine, 2019 року посіла 39 місце у топ-100 найбільших приватних компаній країни. «Лемтранс» є частиною холдингу СКМ найбагатшого українця Ріната Ахметова.
Олександр Примак раніше був топ-менеджером групи компанії «ТрансІнвестСервіс» (ТІС). Це найбільший приватний портовий оператор в Україні, який має п’ять спеціалізованих морських терміналів поблизу порту «Південний» на Одещині.
Бенефіціарним власником МДП, згідно з даними системи YouControl, окрім Примака вказаний киянин Володимир Деменко. Він є директором компанії «Левада Карго», яка займається контейнерними перевезеннями і також входить до групи «Лемтранс».
«Цей район стане інвестиційно привабливим»
Як розповів ZAXID.NET заступник голови Львівської ОДА Юрій Бучко, інвестор планує збудувати великий логістичний хаб, де оброблятимуть вантажні контейнери. Планована потужність комплексу, згідно з попередніми даними адміністрації, становитиме близько 50 тис. контейнерів на рік.
контейнерів на рік.
«В контейнерному терміналі вони перевантажуватимуть вантажі із залізничного на автомобільний транспорт і навпаки. Також там буде залізничний хаб, який з’єднуватиме українські колії [1520 мм] з європейськими [1435 мм]. Із однієї колії на іншу можна буде швидко перевантажувати товари та відправляти їх до місця призначення», – розповів Юрій Бучко.
Колишня нафтобаза, на місці якої зводять сухий порт (фото «ПриватБанку»)
За словами очільника департаменту економічної політики Львівської ОДА Степана Куйбіди, будівництво сухого порту триватиме упродовж кількох років. До 2026 року інвестор планує остаточно ввести комплекс в експлуатацію, а першу чергу обіцяють здати вже до кінця поточного року.
«Минулого тижня [15-21 березня] вони почали підготовчі роботи – розчистку ділянки від хащ, вже підвели світло», – зазначив Куйбіда. За його словами, після запуску першої черги на об’єкті працюватимуть близько 50 людей, коли порт запрацює на повну потужність штат планують розширити до 200 робочих місць.
Як повідомив Куйбіда, спочатку порт використовуватиме лише стару колію, на якій зроблять «косметичний ремонт». «У подальшому, це йдеться про 2023-2024 роки, якщо пропускна здатність дозволить, вони найімовірніше розширюватимуть колійну мережу», – розповів він.
В обласній адміністрації упевнені, що майбутній сухий порт може згодом стати ключовим транзитним пунктом на шляху товарів з Китаю в Європу. Терміналом зможуть користуватимуться всі зацікавлені, наприклад українські агрохолдинги, які експортують свою продукцію до ЄС.
«Загалом йдеться про всі товари, які можуть рухатися в бік Європейського Союзу. І це не тільки продукція агропромислового комплексу. Якщо стосунки з Китаєм збережуться на такому рівні, як є нині, то ми можемо стати логістичним хабом для їхніх товарів на шляху до Європи. Звісно, ми не закриємо всю потребу в такій логістиці, але свою нішу ми зможемо зайняти», – вважає Куйбіда.
За словами Юрія Бучка, користь від цього сухого порту для Львівщини може бути не лише у нових робочих місцях. «[Шегинівська] ОТГ отримуватиме орендну плату за землю, це близько 1,5 млн грн на рік. Загалом цей район стане інвестиційно привабливим, тут розвиватиметься різна інфраструктура – заправки, готелі та інші заклади, як наприклад це є навколо митного посту у Городку», – переконаний заступник голови ОДА.
«[Шегинівська] ОТГ отримуватиме орендну плату за землю, це близько 1,5 млн грн на рік. Загалом цей район стане інвестиційно привабливим, тут розвиватиметься різна інфраструктура – заправки, готелі та інші заклади, як наприклад це є навколо митного посту у Городку», – переконаний заступник голови ОДА.
У прес-службі «Лемтрансу» ZAXID.NET підтвердили, що перші вантажні потяги їхній хаб планує прийняти до кінця року. Водночас уточнили, що вони розраховують на плановану потужність сухого порту до 100 тис. контейнерів на рік (контейнери TEU об’ємом від 19 до 43 м3).
«Після завершення будівництва вантажоперевізники та вантажовідправники отримають можливість швидкого перевалювання контейнерів із залізничних вагонів колії 1520 [мм] на колію 1435 [мм] і навпаки», – повідомила у письмовому коментарі прес-служба «Лемтрансу». Зазначається, що оперативна обробка вантажів у великих обсягах дасть змогу «стати основним транспортним хабом між регіонами України+Азія і Європейською термінальною мережею, а також зможе залучити в Україну додатковий транзит із Китаю».
За твердженням «Лемтрансу», загальні інвестиції у проект сухого порту становитимуть близько 15 млн дол. США (418 млн грн за поточним курсом).
Скільки сухих портів на Львівщині
Проект від «Лемтрансу» – лише один з трьох сухих портів у колишньому Мостиському (тепер Яворівському) районі.
2019 року на околиці села Волиця велика аграрна компанія «Агросем» почала будівництво логістичного терміналу MOST Logistic Terminal. Як розповідав її співзасновник Олег Звягінцев у коментарі аграрному часопису «Зерно», для цього компанія викупила сім гектарів землі та почала прокладати вузьку та широку колії. Будувати планували в два етапи: на першому мали звести логістичний хаб із розвантажування мінеральних добрив, які продавав «Агросем», а на другому – власне сухий порт та елеватор, який мав оперативно «приймати та завантажувати вагони зерном на Європу». Загалом проект 2019 року оцінювали в 10 млн євро.
Наразі MOST Logistic Terminal ще добудовують, проте він вже надає послуги з перевантаження, зберігання вантажів та організації їхнього транспортування.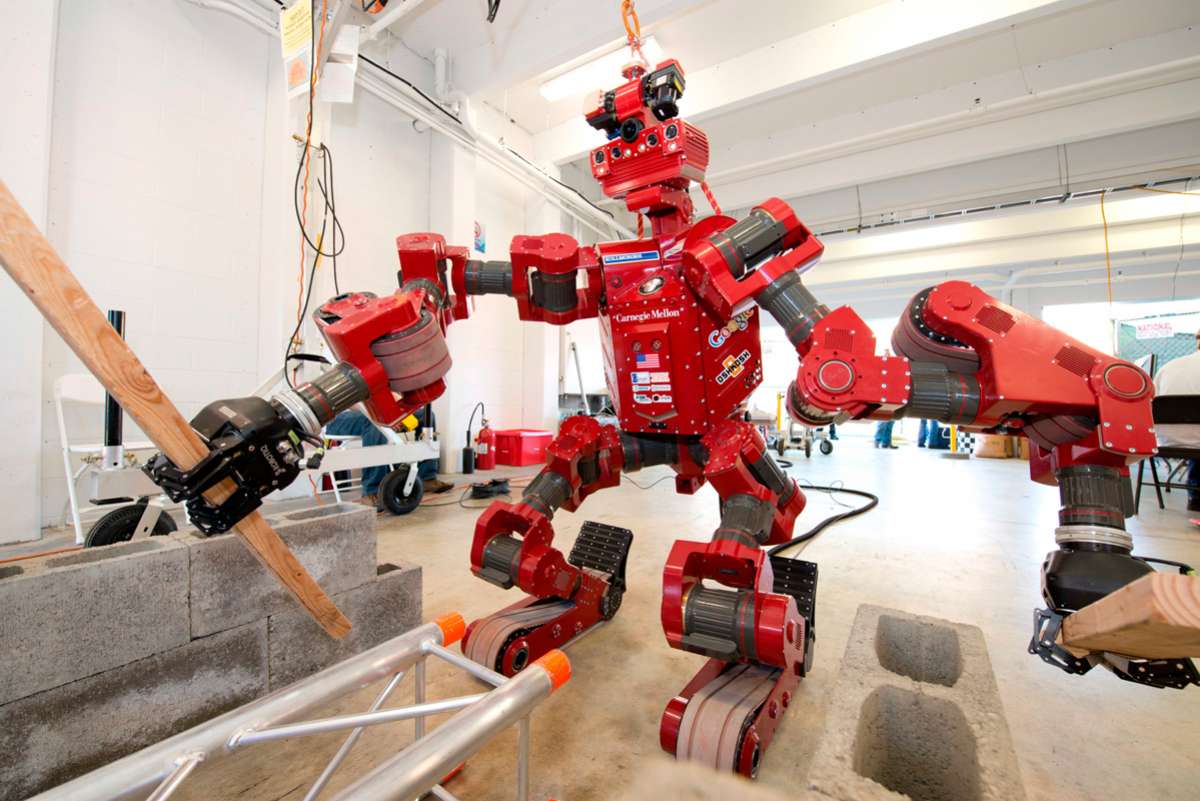
Інший проект – це проект індустріального парку «Мостиський сухий порт» площею 63,25 га між містом Мостиська, селами Волиця та Годині. Вперше про нього заговорили 2017 року – тоді Львівська ОДА визначила низку земельних ділянок, які у подальшому мали запропонувати приватним інвесторам для будівництва логістичних потужностей. Детальний план території сухого порту у травні 2020 року оприлюднила Мостиська РДА, перед тим інформацію про нього надрукували в інвестиційному атласі України. У Львівській ОДА тоді повідомляли, що є кілька компаній, які думають над тим, щоби взяти участь в цьому проекті.
Як розповів тепер ZAXID.NET голова департаменту економічної політики ЛОДА Степан Куйбіда, навесні 2020 року адміністрація вела перемовини із іноземним аграрним інвестором, який хотів займатися на території індустріального парку переробкою кукурудзи та виробництвом біогазу, але переговори не мали успіху.
«Перемовини про це були. Ми в травні [2020 року] виїжджали з потенційним інвестором на це місце, ознайомлювалися з ділянкою. Обласна адміністрація та ОТГ надали інвестору інформацію про проект. Ключовим питанням для нього була кількість кукурудзи, яку вирощують в радіусі до 50 км від місця розташування ділянки. Але далі процес поступу не мав», – зазначив посадовець. Тож нині цей проект сухого порту фактично заморожений.
Обласна адміністрація та ОТГ надали інвестору інформацію про проект. Ключовим питанням для нього була кількість кукурудзи, яку вирощують в радіусі до 50 км від місця розташування ділянки. Але далі процес поступу не мав», – зазначив посадовець. Тож нині цей проект сухого порту фактично заморожений.
Якщо Ви виявили помилку на цій сторінці, виділіть її та натисніть Ctrl+Enter
Ремонт Телевізора у Мостиськах ᐈ ціна від 350 грн
Послуга
Більшість поломок телевізорів є наслідком неправильної експлуатації техніки. Серед таких причин часто фігурують: надмірне навантаження, неправильні налаштування, ненадійна фіксація до настінного кріплення тощо. У таких випадках майстру часто вдається повернути телевізор в робочий стан відразу після проведення діагностики.
Серйозніший і терміновий ремонт ЖК телевізора вдома у Мостиськах потрібен тоді, коли причиною його поломки виступає вихід з ладу внутрішніх деталей: одна з мікросхем, резистор, конденсатор, блок живлення тощо. Часто фахівці стикаються з викликом через поломки антенних гнізд або одного з роз’ємів, призначених для силових кабелів, штекерів, HDMI і USB пристроїв. Подібне трапляється через неакуратне поводження з ними та вимагає заміни.
Часто фахівці стикаються з викликом через поломки антенних гнізд або одного з роз’ємів, призначених для силових кабелів, штекерів, HDMI і USB пристроїв. Подібне трапляється через неакуратне поводження з ними та вимагає заміни.
Рідше причиною виклику майстра є несправність динаміків. У цьому випадку фахівець проведе тестування аудіо можливостей техніки та відновить звук.
Найскладнішим і дорогим вважається ремонт ЛЕД (LED) телевізорів у Мостиськах, викликаний поломкою матриці. Часто вона підлягає відновленню, однак в цьому випадку техніку слід доставити в майстерню. У ситуації, коли матриця не підлягає відновленню, майстер може запропонувати варіант її заміни на оригінал або надійний аналог високої якості.
Master911 пропонує ремонт рідкокристалічних телевізорів у Мостиськах від усіх відомих виробників: Samsung (Самсунг), LG (ЛЖ), Daewoo (Дейво), Hyundai (Хюндай), Pioneer (Піонер), Funai (Фунай), Sharp (Шарп), Sony (Соні), Philips (Філіпс), Toshiba (Тошиба), а також послуги з ремонту телевізорів інших типів будь-яких моделей, незалежно від року випуску.
Майстер
Перед виходом на роботу всі наші техніки з ремонту телевізорів проходять навчання, і складають іспит. Тільки 15% з усіх кандидатів демонструють високий результат – 4,5 бали і вище. Вони й допускаються до обслуговування клієнтів.
Техніки працюють зі своїми інструментами, при необхідності забирають техніку в майстерню. Вони готові відповісти на будь-які питання.
Під час роботи наші майстри не курять і не вживають нецензурну лексику, а також прибирають своє робоче місце після ремонту.
Ремонт ЛЕД телевізорів у Мостиськах. Як формується ціна?
Ключовий принцип роботи сервісу побутових послуг Master911 – абсолютно прозоре та зрозуміле кожному нашому клієнту ціноутворення. У зв’язку з цим, вартість всіх стандартних послуг прописана в прайс-листі, без урахування вартості запасних частин, що підлягають заміні, і транспортних витрат.
У процесі оформлення заявки, ми ставимо клієнтам ряд уточнювальних питань щодо виробника телевізора, його моделі та року випуску, а також причини виклику майстра.
На основі отриманої інформації ми готові проконсультувати і назвати приблизну вартість послуги. У разі якщо мова йде про стандартну поломки, назвемо точну вартість майбутнього ремонту. Буває так, що «симптоми» поломки занадто загальні та без попередньої діагностики встановити точну причину виходу з ладу телевізора неможливо. У подібних ситуаціях ціна буде названа майстром вдома у клієнта, вона буде точно відповідати тій, що наведена в нашому прайсі.
Що ви отримаєте?
- Грамотний ремонт LCD телевізорів у Мостиськах. Фахівці Master911 постійно працюють з моделями різних брендів, завдяки чому їх досвіду та професіоналізму можна повністю довіряти.
- Швидкий виїзд за вказаною в заявці адресою.
- Відповідальність за якість послуг. При виявленні будь-яких помилок / конфліктів, в процесі ремонту, звертайтеся до нас, і ми допоможемо розв’язати будь-яку ситуацію.
- Цілодобове приймання заявок на виклик майстра з ремонту телевізора у Мостиськах, в тому числі у вихідні та святкові дні.

- Швидкий приїзд фахівця (приблизно через три години після виклику).
- Підтримка чистоти на робочому місці. Після закінчення ремонту наші майстри обов’язково проведуть прибирання на своєму робочому місці.
- Справедлива вартість. Ціна кожної послуги повністю відповідає кваліфікації та досвіду майстра.
- Зручний спосіб оплати. Якщо треба викликати майстра з ремонту телевізора у Мостиськах, очікуйте на можливість оплати послуги готівкою або безготівковим переказом.
- Фіксована ціна. При складанні договору вказується вартість майбутніх робіт, яка точно відповідає зазначеній в прайсі, і яка залишиться незмінною до закінчення робіт.
- Гарантія. Майстер сервісу Master911 надає гарантії на всі надані послуги.
- Страхівка. Телемайстер з ремонту телевізорів у Мостиськах перед виходом на роботу проходить перевірку паспортних даних.
 Тому, якщо Ви зіткнулися з недоброзичливим або грубим ставленням, звертайтеся в службу підтримки Master911, і ми допоможемо у розв’язанні конфлікту, що виник.
Тому, якщо Ви зіткнулися з недоброзичливим або грубим ставленням, звертайтеся в службу підтримки Master911, і ми допоможемо у розв’язанні конфлікту, що виник. - Договір. Після надання необхідних послуг, клієнт отримує на руки акт виконаних робіт.
Працюємо в межах міста Мостиська з виїздом по Львівській області
Якщо вас цікавить терміновий ремонт телевізорів вдома у Мостиськах, звертайтеся в сервіс Master911. Досвідчений фахівець високої кваліфікації приїде за вказаною в заявці адресою, і за одну-дві години надасть якісну послугу.
Ремонт телевізорів у Мостиськах. Працюємо в межах міста Мостиська
Ті, хто проживають в межах міста, можуть очікувати на те, що майстер виїде до вас в середньому через три години після подачі та оформлення заявки. Це гарантує виконання необхідних послуг в мінімальний термін.
Працюємо в передмісті Мостиськ
Якщо ви перебуваєте в передмісті Мостиськ, приїзд фахівця може відняти приблизно 4-5 годин.
Працюємо по Львівській області
Сервіс Master911 має своїх майстрів практично у всіх населених пунктах Львівської області. Завдяки цьому, якщо потрібний ремонт телевізорів, то ціна у Мостиськах буде нижчою, що пояснюється економією на транспортних витратах. Додатковий плюс – Ви очікуйте на те, що майстер приїде в день подачі заявки.
В окремих випадках, обумовлених високою сезонною завантаженістю, приїзд фахівця може бути перенесений на наступний день.
Контакти
ОКПП “КИЇВ”
м. Бориспіль
НАДПСУ
м. Хмельницький
Північне регіональне управління
м. Житомир
Північне регіональне управління
м. Житомир
Луцький прикордонний загін
м. Луцьк
Луцький прикордонний загін
м. Луцьк
volinskiy_zagin@dpsu. gov.ua
gov.ua
Житомирський прикордонний загін
м. Житомир
Житомирський прикордонний загін
м. Житомир
Чернігівський прикордонний загін
м. Чернігів
Західне регіональне управління
м. Львів
Чернігівський прикордонний загін
м. Чернігів
Львівський прикордонний загін
м. Львів
Західне регіональне управління
м. Львів
Мукачівський прикордонний загін
м. Мукачево
Львівський прикордонний загін
м. Львів
Чернівецький прикордонний загін
м. Чернівці
chernivci_zagin@dpsu. gov.ua
gov.ua
Мукачівський прикордонний загін
м. Мукачево
Мостиський прикордонний загін
м. Мостиська
Чернівецький прикордонний загін
м. Чернівці
Чопський прикордонний загін
м. Чоп
Мостиський прикордонний загін
м. Мостиська
Південне регіональне управління
м. Одеса
Чопський прикордонний загін
м. Чоп
Могилів-Подільський прикордонний загін
м. М.Подільський
Південне регіональне управління
м. Одеса
Подільський прикордонний загін
м. Котовськ
kotovskiy_zagin@dpsu. gov.ua
gov.ua
Могилів-Подільський прикордонний загін
м. М.Подільський
Б.-Дністровський прикордонний загін
м. Білгород – Дністровський
Подільський прикордонний загін
м. Котовськ
Ізмаїльський прикордонний загін
м. Ізмаїл
Б.-Дністровський прикордонний загін
м. Білгород – Дністровський
Одеський прикордонний загін
м. Одеса
Ізмаїльський прикордонний загін
м. Ізмаїл
Одеський загін морської охорони
м. Одеса
Одеський прикордонний загін
м. Одеса
Одеська окрема авіаційна ескадрилья
м. Одеса
Одеса
Одеський загін морської охорони
м. Одеса
Азово-Чорноморське регіональне управління
м. Херсон
Одеська окрема авіаційна ескадрилья
м. Одеса
Азово-Чорноморське регіональне управління
м. Херсон
Бердянський прикордонний загін
м. Бердянськ
Бердянський прикордонний загін
м. Бердянськ
Херсонський прикордонний загін
м. Херсон
Херсонський прикордонний загін
м. Херсон
RegioJet запустить поїзд Прага-Краків-Мостиська з червня 2020 року
21 Січня 2020
Залізниця – доволі зручний та економічно вигідний варіант для тих, хто любить подорожувати не лише Україною, але й за кордоном. Популярність залізничного сполучення Київ-Львів-Перемишль підтверджує цей факт – не потрібно стояти у довгих виснажливих чергах на автомобільний пунктах пропуску, а також переплачувати за дорогий авіапереліт.
Популярність залізничного сполучення Київ-Львів-Перемишль підтверджує цей факт – не потрібно стояти у довгих виснажливих чергах на автомобільний пунктах пропуску, а також переплачувати за дорогий авіапереліт.
“Укрзалізниця”, а також іноземні залізничні перевізники активно працюють над розширенням мережі міжнародних сполучень з українськими містами. Так, у 2020 році можуть з’явитись одразу два прямих залізничних маршрути, що проходитимуть через Прагу, Остраву, Краків, Жешув і вестимуть аж до українського кордону.
Про обидва сполученнях відомо ще з 2019 року. За останньою інформацією, з середини березня 2020 року чеський автобусний і залізничний перевізник Leo Express може запустити прямий поїзд між Прагою та Мостиськами. Наразі компанія намагається “втиснути” свої поїзди в оновлений графік руху польської залізниці на 2020 рік.
Крім цього, необхідні дозволи на залізничні перевезення територією Польщі очікує ще одна чеська залізнична компанія – RegioJet. Коли можна сподіватись на запуск прямих поїздів Прага-Краків-Мостиська цієї компанії – читайте далі у нашій статті.
Поїзд RegioJet Прага-Краків-Мостиська: розклад руху і ціни на квитки
З 14 червня 2020 року чеська приватна залізнична компанія RegioJet планує запустити новий маршрут, що сполучатиме Україну та Чехію і буде мати декілька зупинок в Польщі. Заявку на перевезення компанія вже подала в Управління залізничного транспорту Польщі, повідомляє портал rynek-kolejowy.pl.
За попередньою інформацією, маршрут поїзда пролягатиме через Прагу, Остраву, Богумін, Краків та Перемишль і закінчиться на залізничній станції в Мостиськах, куди прокладено євроколію шириною 1435 мм. Там на пасажирів, ймовірно, чекатиме пересадка на автобуси до Львова.
Відомо також, що поїзд RegioJet Прага-Мостиська буде нічним і матиме у своєму складі лише спальні вагони. З чеської столиці він виїжджатиме о 22:10 за місцевим часом. У Кракові поїзд зупинятиметься близько 4:30 ночі і далі прямуватиме до Перемишля, де матиме зупинку о 7:30 ранку. Дорога до станції Мостиська-2 забере ще кількадесят хвилин, а отже в Україну поїзд прибуде близько 9:30. У зворотній бік поїзд RegioJet також вирушатиме вночі.
У зворотній бік поїзд RegioJet також вирушатиме вночі.
За планом чеського перевізника, маршрут Прага-Мостиська обслуговуватиметься щоденно. Остаточна вартість квитків наразі невідома, однак в компанії вже заявили, що вона буде конкурентною у порівнянні з автобусними- та авіаперевізниками.
Нагадаємо, у 2020 році “Укрзалізниця” планує збудувати зі станції у Скнилові, що поблизу Львова, до державного кордону з Польщею колію європейського стандарту. Відтак, поїзди, що прибуватимуть із європейських міст до польсько-українського кордону зможуть продовжити свої маршрути аж до столиці Галичини.
Додамо, наприкінці 2019 року “Укрзалізниця” змінила графік руху поїзда №90/89 Львів-Перемишль, аби відтепер його пасажири могли зручно пересісти на нічний поїзд Перемишль-Вроцлав-Берлін.
⇒ Читайте також:
Поїзд Ґрац-Перемишль: розклад, маршрут, ціна та пересадка на Інтерсіті в Україну
Поїздом з Одеси до Парижа через Перемишль та Дрезден: можливий напрямок залізничного сполучення
Укрзалізниця змінила правила перевезення ручної поклажі
Семесюк Лариса Василівна від НАЗК
1.
 Тип декларації та звітний період
Тип декларації та звітний період Щорічна
особи, уповноваженої на виконання функцій держави або місцевого самоврядування (охоплює попередній рік) 2016
2.1. Інформація про суб’єкта декларування
Прізвище: СЕМЕСЮК
Ім’я: ЛАРИСА
По батькові (за наявності): ВАСИЛІВНА
Податковий номер: [Конфіденційна інформація]
Дата народження: [Конфіденційна інформація]
Зареєстроване місце проживання:
Країна: Україна
Поштовий індекс: [Конфіденційна інформація]
Місто, селище чи село: Мостиський район / Львівська область / Україна
Вулиця: [Конфіденційна інформація]
Номер будинку: [Конфіденційна інформація]
Номер корпусу: [Конфіденційна інформація]
Номер квартири: [Конфіденційна інформація]
Місце фактичного проживання або поштова адреса, на яку Національне агентство з питань запобігання корупції може надсилати кореспонденцію суб’єкту декларування: Збігається з місцем реєстрації
Місце роботи:
Місце роботи або проходження служби (або місце майбутньої роботи чи проходження служби для кандидатів): Мостиська міська рада
Займана посада (або посада, на яку претендуєте як кандидат): Начальник земельного відділу Мостиської міської ради
Категорія посади (заповніть, якщо це вас стосується):
Тип посади: Посада в органах місцевого самоврядування
Категорія посади: шоста категорія
Чи відноситесь ви до службових осіб, які займають відповідальне та особливо відповідальне становище, відповідно до статті 50 Закону України “Про запобігання корупції”? Ні
Чи належить ваша посада до посад, пов’язаних з високим рівнем корупційних ризиків, згідно з переліком, затвердженим Національним агентством з питань запобігання корупції? Ні
2.
 2. Інформація про членів сім’ї суб’єкта декларування
2. Інформація про членів сім’ї суб’єкта декларуванняЧленами сім’ї суб’єкта декларування є: особи, які перебувають у шлюбі із суб’єктом декларування (чоловік/дружина), незалежного від того, чи вони проживають спільно; діти, у тому числі повнолітні діти, батьки, особи, які перебувають під опікою і піклуванням, інші особи, які спільно проживають, пов’язані спільним побутом, мають взаємні права та обов’язки із суб’єктом декларування (крім осіб, взаємні права та обов’язки яких не мають характеру сімейних – наприклад, особи, що спільно орендують житло), у тому числі особи, які спільно проживають із суб’єктом декларування, але не перебувають з ним у шлюбі.
| Зв’язок із суб’єктом декларування | Прізвище, ім’я, по батькові | Громадянство | Податковий номер |
|---|---|---|---|
| батько | Прізвище: Семесюк Ім’я: Василь По батькові: БогдановичДата народження: [Конфіденційна інформація] | Україна | [Конфіденційна інформація] |
| мати | Прізвище: СемесюкІм’я: Марія По батькові: ВолодимирівнаДата народження: [Конфіденційна інформація] | Україна | [Конфіденційна інформація] |
| син | Прізвище: СемесюкІм’я: Володимир По батькові: ВасильовичДата народження: [Конфіденційна інформація] | Україна | [Конфіденційна інформація] |
3.
 Об’єкти нерухомості
Об’єкти нерухомостіСуб’єкт декларування повинен задекларувати всі об’єкти нерухомості, що належать йому або членам його сім’ї на праві власності, знаходяться у них в оренді чи на іншому праві користування, незалежно від форми укладення правочину, внаслідок якого набуте таке право. Це включає такі об’єкти нерухомості: земельна ділянка, житловий будинок, квартира, офіс, садовий (дачний) будинок, гараж, інше.
| Загальна інформація | Місцезнаходження | Вартість на дату набуття | Вартість за останньою оцінкою | Інформація щодо прав на об’єкт |
|---|---|---|---|---|
| Вид об’єкта:Житловий будинок Дата набуття права:27.04.2015 Загальна площа (м2): 38,65 Реєстраційний номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: [Не застосовується] Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:24. 06.2010 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Прізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА 06.2010 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Прізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Прізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27. | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1000 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:27.12.2012 Загальна площа (м2): 2561 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:27. 12.2012 Загальна площа (м2): 1439 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 12.2012 Загальна площа (м2): 1439 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
| Вид об’єкта:Земельна ділянка Дата набуття права:22.04.2015 Загальна площа (м2): 584 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
Вид об’єкта:Земельна ділянка Дата набуття права:22. 04.2015 Загальна площа (м2): 2109 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна 04.2015 Загальна площа (м2): 2109 Кадастровий номер:[Конфіденційна інформація]Декларує:матиПрізвище: СемесюкІм’я: Марія По батькові: Володимирівна | Країна:Україна Поштовий індекс:[Конфіденційна інформація] Населений пункт:Мостиська / Мостиський район / Львівська область / Україна Адреса:[Конфіденційна інформація] | [Не відомо] | [Не відомо] | Тип права: ВласністьВідсоток, %: 100Власник: матиПрізвище: СемесюкІм’я: МаріяПо батькові: Володимирівна |
4. Об’єкти незавершеного будівництва
Суб’єкт декларування повинен задекларувати: 1) об’єкти незавершеного будівництва; 2) об’єкти, не прийняті в експлуатацію; або 3) об’єкти, право власності на які не зареєстроване в установленому законом порядку.
Такі об’єкти декларуються, якщо вони: а) належать суб’єкту декларування або членам його сім’ї на праві власності відповідно до Цивільного кодексу України; б) розташовані на земельних ділянках, що належать суб’єкту декларування або членам його сім’ї на праві приватної власності, включаючи спільну власність, або передані їм в оренду чи на іншому праві користування, незалежно від правових підстав набуття такого права; або в) повністю або частково побудовані з матеріалів чи за кошти суб’єкта декларування або членів його сім’ї.
5. Цінне рухоме майно (крім транспортних засобів)
Суб’єкт декларування повинен задекларувати: цінне рухоме майно, вартість якого перевищує 100 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року. Під рухомим майном розуміються будь-які матеріальні об’єкти, які можуть бути переміщеними без заподіяння їм шкоди (наприклад, ювелірні вироби, персональні або домашні електронні пристрої, одяг, твори мистецтва, антикваріат тощо).
У цьому розділі декларації НЕ декларується таке майно: цінні папери, корпоративні права, готівкові кошти, кошти на рахунках в банку чи інших фінансових установах, дорогоцінні (банківські) метали.
Якщо рухоме майно є одночасно подарунком, то воно декларується як в цьому розділі (у разі перевищення зазначеного порогу декларування), так і в розділі “Доходи, у тому числі подарунки”.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі6.
 Цінне рухоме майно – транспортні засоби
Цінне рухоме майно – транспортні засобиСуб’єкт декларування повинен задекларувати: транспортні засоби та інші самохідні машини і механізми незалежно від їх вартості.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі7. Цінні папери
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі8. Корпоративні права
Суб’єкт декларування повинен задекларувати: будь-які корпоративні права, крім акцій, зазначених в попередньому розділі декларації, у тому числі частки (паї) у статутному (складеному) капіталі чи в будь-якому іншому еквіваленті статутного капіталу товариства, підприємства, організації, що зареєстровані в Україні або за кордоном, у тому числі пайові внески в кредитній спілці.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі9. Юридичні особи, кінцевим бенефіціарним власником (контролером) яких є суб’єкт декларування або члени його сім’ї
Суб’єкт декларування повинен задекларувати: будь-які корпоративні права, крім акцій, зазначених в попередньому розділі декларації, у тому числі частки (паї) у статутному (складеному) капіталі чи в будь-якому іншому еквіваленті статутного капіталу товариства, підприємства, організації, що зареєстровані в Україні або за кордоном, у тому числі пайові внески в кредитній спілці.
10. Нематеріальні активи
Нематеріальні активи включають: об’єкти права інтелектуальної власності, що можуть бути оцінені в грошовому еквіваленті (право на винахід, корисну модель, ноу-хау, промисловий зразок, топографії інтегральної мікросхеми, сорт рослин, торгову марку чи комерційне найменування, авторське право тощо), право на використання надр чи інших природних ресурсів, інше.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі11. Доходи, у тому числі подарунки
Суб’єкт декларування повинен зазначити отриманий (нарахований) дохід упродовж звітного періоду.
Доходи включають: заробітну плату (грошове забезпечення), отриману як за основним місцем роботи, так і за сумісництвом, гонорари та інші виплати згідно з цивільно-правовими правочинами, дохід від зайняття підприємницькою або незалежною професійною діяльністю, дохід від надання майна в оренду, дивіденди, проценти, роялті, страхові виплати, благодійну допомогу, пенсію, спадщину, доходи від відчуження цінних паперів та корпоративних прав, подарунки та інші доходи. Під заробітною платою розуміється основна заробітна плата, а також будь-які заохочувальні та компенсаційні виплати, які виплачуються (надаються) особі у зв’язку з відносинами трудового найму.
Подарунки у формі грошових коштів повинні зазначатися, якщо розмір таких подарунків, отриманих від однієї особи (групи осіб) протягом року, перевищує 5 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року.Подарунок у формі, іншій ніж грошові кошти (рухоме майно, нерухомість тощо), зазначається, якщо вартість такого подарунку перевищує 5 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року. Зазначення інформації про подарунок не виключає обов’язок вказати відповідне майно в інших розділах декларації, наприклад, у розділах про цінне рухоме майно, нерухоме майно, цінні папери тощо.
| Джерело доходу | Вид доходу | Розмір (вартість) | Інформація щодо права власності |
|---|---|---|---|
Джерело доходу:Юридична особа, зареєстрована в УкраїніНайменування: Мостиська міська рада, м. Мостиська, вул. Грушевського, 6, Львівської областіКод в Єдиному державному реєстрі юридичних осіб, фізичних осіб – підприємців та громадських формувань: 26307500 Декларує:Прізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА Мостиська, вул. Грушевського, 6, Львівської областіКод в Єдиному державному реєстрі юридичних осіб, фізичних осіб – підприємців та громадських формувань: 26307500 Декларує:Прізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА | Заробітна плата отримана за основним місцем роботи | 73165 | Тип права: ВласністьПрізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА |
| Джерело доходу:Юридична особа, зареєстрована в УкраїніНайменування: Мостиська районна профспілка, м. Мостиська, вул. Грушевського, 22Код в Єдиному державному реєстрі юридичних осіб, фізичних осіб – підприємців та громадських формувань: [Не відомо] Декларує:Прізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА | Інше: профспілкова допомога | 1000 | Тип права: ВласністьПрізвище: СЕМЕСЮКІм’я: ЛАРИСАПо батькові: ВАСИЛІВНА |
12.
 Грошові активи
Грошові активиСуб’єкт декларування повинен задекларувати: готівкові кошти, кошти, розміщені на банківських рахунках, внески до кредитних спілок та інших небанківських фінансових установ, у тому числі до інститутів спільного інвестування, кошти, позичені суб’єктом декларування або членом його сім’ї третім особам, активи у дорогоцінних (банківських) металах, інше.
Не підлягають декларуванню наявні грошові активи (у тому числі готівкові кошти, кошти, розміщені на банківських рахунках, внески до кредитних спілок та інших небанківських фінансових установ, кошти, позичені третім особам) та активи у дорогоцінних (банківських) металах, сукупна вартість яких не перевищує 50 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі13. Фінансові зобов’язання
Суб’єкт декларування повинен задекларувати: отримані кредити, отримані позики, зобов’язання за договорами лізингу, розмір сплачених коштів в рахунок основної суми позики (кредиту) та процентів за позикою (кредитом), зобов’язання за договорами страхування та недержавного пенсійного забезпечення, кошти, позичені суб’єкту декларування або члену його сім’ї іншими особами, несплачені податкові зобов’язання, інше.
Інформація зазначається, лише якщо розмір зобов’язання перевищує 50 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року. Якщо розмір зобов’язання не перевищує 50 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року, зазначається лише загальний розмір такого фінансового зобов’язання (наприклад, якщо розмір сплачених коштів в рахунок основної суми позики (кредиту) у звітному році не перевищує 50 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року, то зазначається лише загальний розмір позики (кредиту)).
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі14. Видатки та правочини суб’єкта декларування
Суб’єкт декларування повинен задекларувати: видатки та всі правочини, вчинені у звітному періоді, на підставі яких у суб’єкта декларування виникає або припиняється право власності, володіння чи користування, у тому числі спільної власності, на нерухоме або рухоме майно, нематеріальні та інші активи, а також виникають фінансові зобов’язання, які зазначені у розділах 3–12 цієї декларації.
Відомості про видатки та правочини зазначаються лише у разі, якщо розмір відповідного видатку (вартість предмету правочину) перевищує 50 прожиткових мінімумів, встановленних для працездатних осіб на 1 січня звітного року.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі15. Робота за сумісництвом суб’єкта декларування
Суб’єкт декларування повинен задекларувати: посаду чи роботу, що виконується або виконувалася за сумісництвом.
Зайняття посади чи робота за сумісництвом декларується, якщо її зайняття (виконання) розпочалося або продовжувалося під час звітного періоду незалежно від тривалості.
Посада чи робота за сумісництвом декларується незалежно від того, чи була вона оплачуваною.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі16. Членство суб’єкта декларування в організаціях та їх органах
Суб’єкт декларування повинен задекларувати: посаду чи роботу, що виконується або виконувалася за сумісництвом.
Зайняття посади чи робота за сумісництвом декларується, якщо її зайняття (виконання) розпочалося або продовжувалося під час звітного періоду незалежно від тривалості.
Посада чи робота за сумісництвом декларується незалежно від того, чи була вона оплачуваною.
Організації, у яких суб’єкт декларування є членом.
У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділі Членство в органах організацій.У суб’єкта декларування чи членів його сім’ї відсутні об’єкти для декларування в цьому розділіДокумент підписано:
СЕМЕСЮК ЛАРИСА ВАСИЛІВНА
Мост Арройо был спроектирован студентами, построен роботами.
Расположенный над ущельем в горах Лос-Анджелеса инновационный новый пешеходный мост, спроектированный студентами-архитекторами и построенный с помощью новых роботизированных технологий. Мост – это пример того, как строительство мостов и зданий можно быстро ускорить и вывести на новые пределы дизайна.
Семь лет назад проект, изначально являвшийся предметом разработки дизайн-студии Школы архитектуры Университета Южной Калифорнии, превратился из умозрительного упражнения в реальную часть городской инфраструктуры.Строительство проекта было завершено незадолго до пандемии, и теперь изображения публикуются впервые.
[Фото: © Иван Баан / любезно предоставлено Madworkshop]Мост Арройо выглядит как скопище птичьего гнезда из стальных труб цвета ржавчины; он достигает 80 футов через обсаженный дубами каньон. Мост, спроектированный студентами с помощью программного обеспечения 3D, изготовленный из сотен стальных деталей с помощью усовершенствованного шестиосевого робота-манипулятора, а затем собранный в большие части, которые были сварены вместе на месте, является прототипом нового метода изготовления архитектуры, который уменьшает отходы и упрощает строительство.
[Фото: любезно предоставлено Gigante AG] «Это будущее. Это дает больше творческой свободы дизайнерам для работы напрямую с производителями », – говорит Р. Скотт Митчелл, доцент Школы архитектуры USC, возглавлявший студию, разработавшую проект, в партнерстве с компанией Autodesk, занимающейся разработкой программного обеспечения для 3D-дизайна. .
Проект начался весной 2014 года, когда к Митчеллу обратился архитектор и другой инструктор USC Дэвид К.Мартин. Митчелл взял курс на изготовление мебели, который Мартин начал преподавать в 2005 году, и у Мартина было предложение для другого рода задач. Вместо изготовления мебели Мартин предложил студентам спроектировать мост для удаленного участка в горах Лос-Анджелеса. Как бывший руководитель проекта AC Martin Partners из Лос-Анджелеса, архитектурной фирмы, основанной его дедом в 1906 году, Мартин всю жизнь интересовался архитектурными инновациями.Для Митчелла, основателя архитектурной компании Gigante AG, этот проект казался идеальным способом изучить новые подходы к строительству в больших масштабах.
[Фото: любезно предоставлено Gigante AG] К концу семестра совместный дизайн моста студентов стал больше, чем просто умной моделью, а скорее задатками проекта, который можно было построить в масштабе в качестве прототипа. Мартин был заинтригован. Через Madworkshop , некоммерческий фонд дизайнерского образования, который Мартин основал вместе со своей женой Мэри, они спонсировали дальнейшее развитие идеи.Вскоре у Митчелла за лето шесть студентов работали, чтобы выяснить, как можно изготовить и построить эту конструкцию. В конце концов они обнаружили, что с помощью правильной технологии они могут создать конструкцию моста, которая уменьшит количество его составных частей примерно до 500, и что эти части могут быть специально изготовлены для объединения в сегменты, которые можно легко транспортировать на удаленный объект.
Мартин был заинтригован. Через Madworkshop , некоммерческий фонд дизайнерского образования, который Мартин основал вместе со своей женой Мэри, они спонсировали дальнейшее развитие идеи.Вскоре у Митчелла за лето шесть студентов работали, чтобы выяснить, как можно изготовить и построить эту конструкцию. В конце концов они обнаружили, что с помощью правильной технологии они могут создать конструкцию моста, которая уменьшит количество его составных частей примерно до 500, и что эти части могут быть специально изготовлены для объединения в сегменты, которые можно легко транспортировать на удаленный объект.
«Однажды Скотт пришел ко мне и сказал:« Я думаю, нам нужно использовать роботов.Это единственный практический способ сделать это ». И я подумал про себя:« О, ч, боже, куда это нас приведет? » », – говорит Мартин.
Он привел проект и его дизайнеров в долгий путь. Поскольку помещения USC не были достаточно большими, чтобы вместить полномасштабное строительство моста или сложность изготовления, несколько студентов-архитекторов переехали в Бостон примерно на семь месяцев, чтобы работать напрямую с Autodesk над архитектурой и проектированием. , и строительный технологический объект.Митчелл летал туда-сюда из Лос-Анджелеса каждую неделю, втискивая 40-часовые недели в несколько дней и дорабатывая сценарии роботов, чтобы оптимизировать производство и эффективность строительства. Используя технологию Autodesk, Митчеллу и студентам удалось уговорить производителей роботов создать сварные швы и фитинги, которые в конечном итоге имели точность в пределах 1 миллиметра от цифрового дизайна, что имеет решающее значение для такой детализированной конструкции, как мост. «Мы действительно разрабатывали новые процессы сварки для этого моста.Нам буквально каждый день приходилось что-то изобретать », – говорит Митчелл.
, и строительный технологический объект.Митчелл летал туда-сюда из Лос-Анджелеса каждую неделю, втискивая 40-часовые недели в несколько дней и дорабатывая сценарии роботов, чтобы оптимизировать производство и эффективность строительства. Используя технологию Autodesk, Митчеллу и студентам удалось уговорить производителей роботов создать сварные швы и фитинги, которые в конечном итоге имели точность в пределах 1 миллиметра от цифрового дизайна, что имеет решающее значение для такой детализированной конструкции, как мост. «Мы действительно разрабатывали новые процессы сварки для этого моста.Нам буквально каждый день приходилось что-то изобретать », – говорит Митчелл.
После того, как роботизированное изготовление было установлено, 500 стальных компонентов моста были сварены роботами примерно на 30 кусков, которые затем были загружены на грузовики и отправлены через всю страну в Лос-Анджелес. находившийся поблизости склад, детали были вывезены на гористую местность для строительства. Из-за своего естественного окружения сайт был труднодоступным. Кусочки были доставлены в конец дороги возле каньона, а затем перевезены на место на телескопическом погрузчике, который выглядит как вездеход, совмещенный с вилочным погрузчиком.Детали были осторожно размещены на сваях, которые были вырыты в земле, и примерно через семь дней весь мост длиной 80 футов был вставлен на место. После еще двух недель сварки она была завершена в мае 2020 года.
Из-за своего естественного окружения сайт был труднодоступным. Кусочки были доставлены в конец дороги возле каньона, а затем перевезены на место на телескопическом погрузчике, который выглядит как вездеход, совмещенный с вилочным погрузчиком.Детали были осторожно размещены на сваях, которые были вырыты в земле, и примерно через семь дней весь мост длиной 80 футов был вставлен на место. После еще двух недель сварки она была завершена в мае 2020 года.
Митчелл говорит, что роботизированное изготовление и сварка помогли проекту устранить большую часть строительных отходов, которые обычно возникают при аналогичном строительстве, без временной опалубки, необходимой для размещения деталей для монтажа. и сварка. По словам Митчелла, мост сделан из 18 000 фунтов стали и образовал всего 1 000 фунтов отходов, все из которых были переработаны.Для других строительных проектов, которые, как известно, производят большое количество отходов, этот процесс предлагает более экологически безопасный путь.
С момента запуска проекта в 2014 году студенты приходили и уходили, но некоторые из них были задействованы на протяжении всего процесса, работая над первоначальным дизайном, а затем участвуя в его строительстве. Митчелл говорит, что такой практический опыт редко встречается в архитектурном образовании. Но на это уходит много времени. На прохождение процесса разрешения на проект в Лос-Анджелесе потребовалось три года.Он не стал раскрывать общий бюджет проекта, но отмечает, что в качестве прототипа он имел более высокую стоимость, чем мост, построенный более традиционным способом. Проект был больше связан с экспериментами и доказательством того, что процесс работает, чем с ограничением бюджета. «Эта часть может появиться позже», – говорит он.
Мост – это редкий реально созданный прототип, спроектированный студентами, и он намекает на мощь, которую может иметь этот тип совместного изготовления роботов. После доработки этот процесс может позволить роботам фрезеровать и сваривать детали даже более крупных конструкций. Мартин говорит, что использование роботов для помощи в изготовлении и строительстве сложных или даже простых зданий и инфраструктур только начинает показывать свой потенциал.
Мартин говорит, что использование роботов для помощи в изготовлении и строительстве сложных или даже простых зданий и инфраструктур только начинает показывать свой потенциал.
«Весь процесс можно автоматизировать. Вместо огромных расходов и огромного строительного мусора он мог бы стать чем-то заранее продуманным и тщательно продуманным, а физический процесс его изготовления был бы высокоэффективным », – говорит Мартин. «Это было обещанием индустриализации с компьютерами и роботами, и этот мост доказывает, что вы абсолютно способны на это.”
Системы развертывания роботов для инспекции мостов (BIRDS)
Большое количество надземных и сложных мостов труднодоступны, требуют грузовых автомобилей для прохождения проверки с контролем движения и представляют угрозу безопасности как для инспекторов, так и для водителей. Таким образом, желательно разработать роботизированные платформы, такие как альпинистские роботы и беспилотные летательные аппараты (БПЛА), для поддержки систем обнаружения и устройств неразрушающего контроля для более безопасного, быстрого, дешевого и надежного осмотра мостов без нарушения транспортного потока. В настоящее время смотровая площадка часто проектируется и строится между балками в надстройке мостов через реки из-за сложности и затрат, связанных с осмотром и обслуживанием мостов. Такая смотровая площадка стоит порядка 1 миллиона долларов и хорошо знакома владельцам мостов и инспекторам.
Подход и методология. В Транспортном центре Университета INSPIRE разрабатываются роботы-альпинисты для бетонных и стальных мостов, а также БПЛА для поддержки инспекции мостов с использованием передовых технологий оценки.В основном они применимы на больших открытых площадках с небольшими препятствиями или без них. Для двутавровых балок или балок подъем по поперечному сечению этих элементов конструкции не является пробным занятием. В частности, подъемный робот может не иметь достаточной площади для безопасного поворота с внутренней на внешнюю поверхность верхнего или нижнего фланца. В этом случае беспилотный автомобиль предназначен для облегчения осмотра двутавровых балок и развертывания подъемных роботов на нижней стороне настила моста между двумя соседними балками.
В настоящее время смотровая площадка часто проектируется и строится между балками в надстройке мостов через реки из-за сложности и затрат, связанных с осмотром и обслуживанием мостов. Такая смотровая площадка стоит порядка 1 миллиона долларов и хорошо знакома владельцам мостов и инспекторам.
Подход и методология. В Транспортном центре Университета INSPIRE разрабатываются роботы-альпинисты для бетонных и стальных мостов, а также БПЛА для поддержки инспекции мостов с использованием передовых технологий оценки.В основном они применимы на больших открытых площадках с небольшими препятствиями или без них. Для двутавровых балок или балок подъем по поперечному сечению этих элементов конструкции не является пробным занятием. В частности, подъемный робот может не иметь достаточной площади для безопасного поворота с внутренней на внешнюю поверхность верхнего или нижнего фланца. В этом случае беспилотный автомобиль предназначен для облегчения осмотра двутавровых балок и развертывания подъемных роботов на нижней стороне настила моста между двумя соседними балками. Беспилотный автомобиль в сочетании с альпинистскими роботами и БПЛА позволит проверять и обслуживать более 90% мостов в Национальной инвентаризации мостов и будет относительно легко принят инспекторами, поскольку они знакомы с концепцией инспекции. платформы. Он должен иметь возможность летать в воздухе и перемещаться по балке с эффективным механизмом сцепления транспортного средства с мостом для плавного перехода от режима полета к режиму перемещения, как это было спроектировано с поддержкой анализа ограниченного напряжения, прототипом, испытаниями, модификациями с расширенными функциональными возможностями и переоборудованием. -испытан в лабораторных и полевых условиях.Общие цели: этот проект направлен на разработку и строительство мобильной испытательной установки на солнечной энергии на базе наземного транспортного средства (например, прогулочного транспортного средства) для поддержки полевых испытаний на площадках мостов и обеспечения беспроводной связи, такой как спутниковые услуги, между мостами без сотовой связи.
Беспилотный автомобиль в сочетании с альпинистскими роботами и БПЛА позволит проверять и обслуживать более 90% мостов в Национальной инвентаризации мостов и будет относительно легко принят инспекторами, поскольку они знакомы с концепцией инспекции. платформы. Он должен иметь возможность летать в воздухе и перемещаться по балке с эффективным механизмом сцепления транспортного средства с мостом для плавного перехода от режима полета к режиму перемещения, как это было спроектировано с поддержкой анализа ограниченного напряжения, прототипом, испытаниями, модификациями с расширенными функциональными возможностями и переоборудованием. -испытан в лабораторных и полевых условиях.Общие цели: этот проект направлен на разработку и строительство мобильной испытательной установки на солнечной энергии на базе наземного транспортного средства (например, прогулочного транспортного средства) для поддержки полевых испытаний на площадках мостов и обеспечения беспроводной связи, такой как спутниковые услуги, между мостами без сотовой связи. сайты и транспортный центр университета INSPIRE. Мобильный испытательный центр в дальнейшем именуется системами развертывания роботов для инспекции мостов (BIRDS), которые включают в себя альпинистских роботов, БПЛА, мультимодальные транспортные средства, датчики, устройства неразрушающей оценки, блоки сбора данных, аккумуляторы и различные инструменты для поддержки полевых испытаний и беспроводной связи.ПТИЦЫ служат в качестве полевой станции для сбора и передачи данных на базовую станцию в Транспортном центре Университета INSPIRE, а также в качестве средства передвижения для бригады из двух или трех инспекторов.
Объем работ в 1-й год: (1) Разработка и создание прототипа гибридного летающего и пересекающего беспилотного транспортного средства для осмотра балочных мостов и развертывания альпинистских роботов, (2) Разработка технических спецификаций транспортного средства для полета, пересечения и их переходных характеристик. и (3) минимизировать вес транспортного средства с помощью компьютерного моделирования и анализа в различных условиях эксплуатации.
сайты и транспортный центр университета INSPIRE. Мобильный испытательный центр в дальнейшем именуется системами развертывания роботов для инспекции мостов (BIRDS), которые включают в себя альпинистских роботов, БПЛА, мультимодальные транспортные средства, датчики, устройства неразрушающей оценки, блоки сбора данных, аккумуляторы и различные инструменты для поддержки полевых испытаний и беспроводной связи.ПТИЦЫ служат в качестве полевой станции для сбора и передачи данных на базовую станцию в Транспортном центре Университета INSPIRE, а также в качестве средства передвижения для бригады из двух или трех инспекторов.
Объем работ в 1-й год: (1) Разработка и создание прототипа гибридного летающего и пересекающего беспилотного транспортного средства для осмотра балочных мостов и развертывания альпинистских роботов, (2) Разработка технических спецификаций транспортного средства для полета, пересечения и их переходных характеристик. и (3) минимизировать вес транспортного средства с помощью компьютерного моделирования и анализа в различных условиях эксплуатации.
пр.
Предмет / указатель терминов
Информация для подачи
- Регистрационный номер: 01700884
- Тип записи: Исследовательский проект
- Агентство-источник: Проверка и сохранение инфраструктуры через Транспортный центр Университета роботизированных исследований
- Номера контрактов: 69A3551747126
- Файлы: UTC, RIP
- Дата создания: 1 апреля 2019 г. 16:12
Строим мосты будущего с помощью роботов
Строительный сектор сталкивается с множеством проблем.Одним из наиболее важных вопросов в этой отрасли является безопасность на рабочем месте. В США строительство представляло собой одну из самых опасных областей для работы, поскольку в 2015 году оно занимало первое место по количеству несчастных случаев на рабочем месте (по последним доступным данным) с 937 несчастными случаями, что на 4 процента больше, чем в предыдущем году. Кроме того, отрасль также страдает от острой нехватки квалифицированной рабочей силы, из-за чего более 60% подрядчиков с трудом подбирают подходящий персонал для своих площадок.
Кроме того, отрасль также страдает от острой нехватки квалифицированной рабочей силы, из-за чего более 60% подрядчиков с трудом подбирают подходящий персонал для своих площадок.
Тем не менее, спрос на рабочую силу не снизился.Напротив, недавние стихийные бедствия, такие как ураган Ирма и Харви, вызвали резкий скачок спроса на строительных рабочих, стремящихся восстановить объекты и инфраструктуру, разрушенные этими ураганами.
К счастью, экономические условия и новые технологические достижения позволили отрасли занять активную позицию в отношении решения проблем и роста. Ниже мы представим вам два современных решения от разных компаний, решающих эти проблемы в области строительства мостов.
- Тайбот
- Мост MX3D
Связывание арматуры – один из самых ответственных процессов при строительстве моста. Эта утомительная задача может вызвать проблемы со здоровьем, например, проблемы со спиной. Более того, поскальзывания и падения являются причиной номер один несчастных случаев в этом секторе, подвергая рабочих, занятых на таких проектах, более высокому риску получения более серьезных травм.
Стив Мак, генеральный директор и председатель Brayman Construction Corp., вместе с Джереми Сироком, бывшим менеджером технической программы в Национальном центре робототехники Университета Карнеги-Меллона, решили решить эту проблему с помощью очень новаторского решения.
Они решили создать робота, способного связывать арматуру, которого они назвали «Тайбот». Это оригинальное решение значительно улучшает этот процесс, поскольку роботу требуется только один руководитель для управления машиной. «Тайбот» может расширяться до 140 футов по ширине моста, а его роботизированная рука может автоматически обнаруживать перекрестки для связывания арматуры, потенциально экономя сотни долларов на трудозатратах, но также значительно снижая травмы и ответственность в области мостостроение.
В дополнение к многочисленным преимуществам, это решение не за горами, поскольку генеральный директор заявил, что робот почти готов к выходу на рынок с затратами, которые улучшат прибыльность сайтов.
Голландская компания MX3D стремится произвести революцию в индустрии крупномасштабной 3D-печати. Чтобы выполнить эту задачу, они работают над очень передовым проектом: первым стальным мостом, напечатанным на 3D-принтере. Компания разработала новую конструкцию 3D-принтера, прикрепив к принтеру 6-осевую промышленную роботизированную руку, чтобы обеспечить большую гибкость в процессе.
Мост был спроектирован Йорисом Лаарманом, известным голландским дизайнером, известным своими новаторскими технологиями. Изначально мост задумывался как центр Амстердама. Однако возникли трудности, и в настоящее время проект находится в стадии реализации в штаб-квартире MX3D, и ожидается, что он будет завершен в начале 2018 года.
Хотя этот проект не решает насущную потребность, так как город каналов уже обладает разветвленной сетью мостов, а 3D-печать остается слишком дорогостоящей. Проект надеется продемонстрировать все потенциальные применения этой новой технологии, такие как более экологичные конструкции за счет меньшего количества отходов от аддитивного производства, меньшего количества человеческих ошибок и гибких графиков, поскольку машины могут работать непрерывно без потерь времени или усталости, среди многих других преимуществ. .
Проект надеется продемонстрировать все потенциальные применения этой новой технологии, такие как более экологичные конструкции за счет меньшего количества отходов от аддитивного производства, меньшего количества человеческих ошибок и гибких графиков, поскольку машины могут работать непрерывно без потерь времени или усталости, среди многих других преимуществ. .
Однако, по словам дизайнера, индустрия 3D-печати повлияла не только на труд и устойчивость. Он нарушил широкий спектр строительных процессов.Так обстоит дело с дизайном: теперь архитекторам и дизайнерам необходимо одновременно работать с инженерами и другими специалистами в области строительства, тогда как раньше это происходило поэтапно. Еще одним большим преимуществом использования роботов и 3D-печати для строительства является машинное обучение, потенциально повышающее производительность на строительной площадке за счет использования ИИ.
В заключение, эти проекты позволяют нам получить представление о том, как будет выглядеть будущее мостостроения, а также подталкивают другие предприятия к модернизации. Надеемся, что вскоре мы будем рассматривать более экологичную и безопасную инфраструктуру для всех.
Надеемся, что вскоре мы будем рассматривать более экологичную и безопасную инфраструктуру для всех.
Разработка роботов для проверки мостовых кабелей
В этом документе представлен робот для проверки мостовых кабелей, разработанный в Корее. Были разработаны два типа роботов для контроля кабеля для вантово-подвесных мостов и вантовых мостов. Обсуждаются конструкция роботизированной системы и выполнение методов неразрушающего контроля, связанных с роботом для контроля кабеля. Также представлен обзор последних достижений в новых роботизированных технологиях проверки мостовых кабелей и текущих методов проверки мостовых кабелей.
1. Введение
Мосты являются важным национальным достоянием, за которым следует надлежащим образом ухаживать для обеспечения общественной безопасности. Последние достижения в области мостостроения позволили проектировать и строить мосты более длинными и тонкими, чем когда-либо. В частности, мосты с длинными пролетами на кабельных опорах требуют серьезного обслуживания, связанного с надежными и эффективными методами контроля.
Мосты с вантовыми опорами, включая вантовые и вантовые мосты, состоят из множества подсистем, включая пилоны, анкерные крепления, тросы, фермы жесткости и плиты.Кабельная система моста – важная подсистема, которая состоит из основных кабелей, подвесных тросов и подпорных тросов. Кабельный канат обычно изготавливают из высокопрочной углеродистой стали, которая в пять-десять раз прочнее обычных конструкционных сталей [1].
При обслуживании мостовых кабелей ремонту подлежат лишь некоторые компоненты, такие как оболочки кабеля из полиэтилена высокой плотности (HDPE), неопреновые башмаки и эластомерные кольца. При наличии коррозионных или усталостных повреждений основных натяжных элементов (МТЭ) вблизи анкеров или в свободных пролетах ремонт поврежденных МТЭ практически невозможен.Таким образом, профилактическое обслуживание жизненно важно для обеспечения безопасности кабельных систем. Для этого необходима разработка надежных методов контроля для оценки материального и структурного состояния кабельных систем [2].
В США автомобильные мосты следует визуально осматривать каждые два года [3]. Технологии мониторинга состояния конструкций (SHM) также использовались для оценки состояния мостов. Однако современные методы оценки состояния мостов имеют некоторые технические ограничения.Например, возле креплений кабели на опорах часто не видны, поскольку эти кабели заделаны раствором. В свободных пролетах для доступа к кабелям используются тележки и катушки, что не является самым безопасным способом для инспекторов [4, 5]. Ограничения нынешних методов контроля кабелей можно преодолеть с помощью новых робототехнических технологий. Технологии робототехники обычно сочетаются с мощными методами неразрушающего контроля (NDT) для кабельных систем мостов, которые трудно доступны при нынешней практике контроля.В этой статье рассматриваются последние достижения в области роботизированных технологий проверки мостовых кабелей. В этом документе также представлен уникальный робот для проверки кабелей, который был разработан в Корее с 2010 года в рамках проекта исследований и разработок сверхдлинных мостов, проводимого Министерством земли, инфраструктуры и транспорта Кореи (MOLIT). Будет представлена конструкция кабельной роботизированной системы и результаты испытаний различных методов неразрушающего контроля, связанных с роботом.
Будет представлена конструкция кабельной роботизированной системы и результаты испытаний различных методов неразрушающего контроля, связанных с роботом.
Этот документ состоит из двух частей: (i) обзор современных методов проверки кабелей (разделы 2 и 3) и (ii) введение в робота для проверки кабелей, разработанного в Корее (раздел 4).В Разделе 2 будет описан обзор современных методов проверки кабеля. В Разделе 3 будут описаны имеющиеся в продаже системы контроля кабеля. Подробное описание недавно разработанного в Корее робота для проверки кабелей представлено в Разделе 5.
2. Современные методы проверки кабелей мостов
2.1. Тенденции в строительстве и обслуживании мостов с кабельной опорой
В мире строится все больше мостов с кабельной опорой, особенно в развивающихся странах (см. Рисунок 1).Технологии строительства вантовых и вантовых мостов были первоначально разработаны в США и Германии, а затем в Японии в рамках крупных строительных проектов моста Акаси-Кайкё, вантово-подвесного моста и моста Татара, вантового моста. мост. Совсем недавно в Китае был построен ряд мостов с кабельной опорой, в том числе мост Цин Ма в 1997 году, мост Сутонг в 2008 году и мост Сихоумен в 2009 году. Строительство моста Камнерезов считается технологическим памятником в мире. конструкция моста за счет его уникальной конструкции в виде композитных башен и сдвоенных аэродинамических настилов.Объем рынка строительства мостов с кабельной опорой быстро растет в странах Юго-Восточной Азии, включая Таиланд, Малайзию, Сингапур, Вьетнам, Филиппины, Камбоджу и Бангладеш.
мост. Совсем недавно в Китае был построен ряд мостов с кабельной опорой, в том числе мост Цин Ма в 1997 году, мост Сутонг в 2008 году и мост Сихоумен в 2009 году. Строительство моста Камнерезов считается технологическим памятником в мире. конструкция моста за счет его уникальной конструкции в виде композитных башен и сдвоенных аэродинамических настилов.Объем рынка строительства мостов с кабельной опорой быстро растет в странах Юго-Восточной Азии, включая Таиланд, Малайзию, Сингапур, Вьетнам, Филиппины, Камбоджу и Бангладеш.
В Корее Большой мост Нам-Хэ был построен в 1973 году как первый вантово-подвесной мост, а Большой мост Джин-До был построен в 1984 году как первый вантовый мост. Самый длинный вантово-подвесной мост в Корее – мост И-Сун-Шин, построенный в 2013 году, а самый длинный вантовый мост в Корее – это Инчхонский мост, построенный в 2010 году (см. Рис. 2).Поскольку на Корейском полуострове много островов, для соединения островов с сушей требуется строительство длиннопролетных мостов. В настоящее время в прибрежных районах запланировано строительство 64 мостов. Объем рынка строительства мостов оценивается в 1,2 миллиарда долларов США в ближайшие 20 лет [7].
В настоящее время в прибрежных районах запланировано строительство 64 мостов. Объем рынка строительства мостов оценивается в 1,2 миллиарда долларов США в ближайшие 20 лет [7].
2.2. Современные методы обслуживания мостов с кабельной опорой
2.2.1. Техническое обслуживание мостов с кабельной опорой
Надежные методы контроля жизненно важны для обеспечения структурной и эксплуатационной безопасности мостов с кабельной опорой.Агентства по техническому обслуживанию мостов используют различные уровни инспекций, включая плановые, периодические, экстренные и углубленные. В таблице 1 приведены основные руководства по проверке мостов в США и Корее.
| ||||||||||||||||||||||||||||||||||||||||||
| MOLIT: Министерство земли, инфраструктуры и транспорта. 2 KISTEC: Корейская корпорация безопасности инфраструктуры. | ||||||||||||||||||||||||||||||||||||||||||
 (2011)
(2011) )
) )
) Согласно [8], мосты следует проверять каждые два года. В Корее мостовые агентства должны проводить регулярные проверки каждые 2 года и углубленные проверки каждые 5 лет. При осмотре моста важно наблюдать за чрезмерным износом, обрывом проводов, коррозией и точечной коррозией, состоянием смазки, состоянием сердечника и т. Д. Причины дефектов и ухудшений должны быть выяснены с использованием соответствующих методов диагностики.Частые дефекты кабеля включают ржавчину на поверхности, потерю сечения, усталостное растрескивание и повреждение при столкновении.
При осмотре моста важно наблюдать за чрезмерным износом, обрывом проводов, коррозией и точечной коррозией, состоянием смазки, состоянием сердечника и т. Д. Причины дефектов и ухудшений должны быть выяснены с использованием соответствующих методов диагностики.Частые дефекты кабеля включают ржавчину на поверхности, потерю сечения, усталостное растрескивание и повреждение при столкновении.
2.2.2. Проверка кабеля с использованием методов неразрушающего контроля
Проблемы при проверке кабеля моста в основном связаны с ограниченным доступом к кабельным системам. MTE в кабельных пучках часто почти не видны инспекторам. Кабели, залитые в местах анкеровки, очень трудно проверять. Визуальный осмотр и методы неразрушающего контроля мостовых кабелей в свободных пролетах затруднены из-за недоступности кабеля.Раннее обнаружение внутренних повреждений жизненно важно при профилактическом осмотре. Однако внутреннее повреждение кабелей моста практически невозможно обнаружить с помощью методов визуального осмотра. Например, рисунок 3 иллюстрирует важность раннего обнаружения внутренних дефектов. Во время проекта перемотки основных кабелей моста Нам-Хэ в Корее коррозия была обнаружена в нижней части основных кабелей в середине пролета и вблизи зон крепления боковых пролетов. Обрыв проводов был обнаружен в кабельных бандажах, что могло привести к серьезному разрушению конструкции, если оно не было обнаружено во время проекта модернизации кабеля.Некоторые методы неразрушающего контроля, такие как магнитные, ультразвуковые и рентгеновские испытания, использовались для обнаружения таких внутренних повреждений.
Например, рисунок 3 иллюстрирует важность раннего обнаружения внутренних дефектов. Во время проекта перемотки основных кабелей моста Нам-Хэ в Корее коррозия была обнаружена в нижней части основных кабелей в середине пролета и вблизи зон крепления боковых пролетов. Обрыв проводов был обнаружен в кабельных бандажах, что могло привести к серьезному разрушению конструкции, если оно не было обнаружено во время проекта модернизации кабеля.Некоторые методы неразрушающего контроля, такие как магнитные, ультразвуковые и рентгеновские испытания, использовались для обнаружения таких внутренних повреждений.
2.2.3. Оценка состояния кабеля с использованием методов SHM
Технологии SHM широко используются для оценки структурного состояния кабельных мостов с целью обеспечения безопасности и работоспособности мостов. Цели SHM заключаются в диагностике и прогнозировании структурной безопасности моста на основе измерения поведения конструкций. Система SHM состоит из трех подсистем, включая зондирование, передачу данных и обработку данных. Подсистема датчиков может непрерывно собирать данные датчиков, такие как рабочие нагрузки, воздействия окружающей среды и деформация моста. Подсистема передачи данных передает данные датчиков с удаленного объекта полевого мониторинга в хранилище данных и архивирует их. Подсистема обработки данных извлекает значимую информацию для обслуживания моста из необработанных данных датчиков.
Подсистема датчиков может непрерывно собирать данные датчиков, такие как рабочие нагрузки, воздействия окружающей среды и деформация моста. Подсистема передачи данных передает данные датчиков с удаленного объекта полевого мониторинга в хранилище данных и архивирует их. Подсистема обработки данных извлекает значимую информацию для обслуживания моста из необработанных данных датчиков.
Ряд систем SHM использовался для оценки состояния мостов с кабельной опорой. Примером может служить Система мониторинга ветра и состояния конструкций (WASHMS) для моста Цин Ма, моста Тинг Кау и моста Кап Шуй Мун, разработанная Департаментом автомобильных дорог Гонконга [10].Система датчиков состоит из примерно 900 датчиков, включая акселерометры, тензодатчики, датчики смещения, инклинометр, анемометры, датчики температуры и датчики динамического веса в движении: около 350 датчиков на мосту Цин Ма, 350 на мосту Тинг Кау. , и 200 на мосту Кап Шуй Мун.
В Корее технологии SHM активно используются для мостов с кабельной опорой. На рисунке 4 показана система SHM для моста Йонг-Чон, которая включает термометры, тензодатчики, наклономеры, акселерометры, анемометры, преобразователи смещения и потенциометры.Двенадцать акселерометров установлены по всей тросовой системе моста для контроля сил натяжения тросов.
На рисунке 4 показана система SHM для моста Йонг-Чон, которая включает термометры, тензодатчики, наклономеры, акселерометры, анемометры, преобразователи смещения и потенциометры.Двенадцать акселерометров установлены по всей тросовой системе моста для контроля сил натяжения тросов.
При оценке состояния мостовых тросов измерение силы натяжения троса является важной задачей для оценки структурной безопасности. Согласно Табатабаи [2], хотя измерение силы на основе вибрации обычно используется для оценки уровней внутренних напряжений мостовых тросов, точность во многих полевых приложениях является спорной. Однако внутренние повреждения кабелей, такие как коррозия и обрыв внутренней проволоки, вряд ли можно обнаружить с помощью метода, основанного на вибрации.
2.3. Методы проверки кабеля
Кабели мостов подвержены различным нагрузкам при эксплуатации и окружающей среде, которые могут вызвать различные виды разрушения материалов и конструкции. Следовательно, при контроле кабеля используются комбинации нескольких методов и инструментов неразрушающего контроля [12]. В этом разделе рассматриваются современные методы проверки кабеля.
В этом разделе рассматриваются современные методы проверки кабеля.
2.3.1. Визуальный осмотр
Визуальный осмотр человека считается основным методом контроля кабеля по сравнению с другими методами неразрушающего контроля, хотя осмотр человеком в значительной степени зависит от субъективных суждений отдельных инспекторов [2, 9].В этом методе сначала необходимо визуально осмотреть всю поверхность кабеля с близкого расстояния; затем проводится осмотр неопреновых сапог, неопреновых колец, видимых направляющих труб и доступных поверхностей крепления [2]. Визуальный осмотр часто проводится с помощью тележки для осмотра кабеля, которая движется по кабелю с небольшой скоростью, что может считаться неудобным и требующим много времени. Поскольку на производительность инспекционной тележки в значительной степени влияет наличие препятствий на кабельных путях, некоторые части кабельных систем, такие как свободные кабельные пролеты с защитой от коррозии и зоны крепления, будут недоступны при использовании этого метода [7].
2.3.2. Проверка на основе обработки изображений
Проверка кабеля на основе обработки изображений исходит из более общей области обработки сигналов, включая различные методы обработки изображений, такие как сглаживание изображения, улучшение изображения, сегментация и обнаружение краев [13]. Изображения поверхности кабеля обычно фиксируются камерой в виде цифровых изображений в виде двумерной числовой матрицы. Методы обработки изображений используются для обработки этих числовых матриц, связанных с алгоритмами распознавания образов, для извлечения полезной информации, связанной с повреждениями [14].Мандал и Атертон применили методы обработки изображений для оценки степени повреждения поверхности кабеля [15]. Ho et al. разработаны алгоритмы обнаружения повреждений для проверки кабеля [16]. Эти алгоритмы были разработаны для сглаживания и повышения контрастности исходных изображений, а также для классификации паттернов повреждений на основе методов анализа главных компонентов.
2.3.3. Измерение силы троса на основе вибрации
Сила натяжения троса может быть рассчитана по сигнатурам вибрации мостовых тросов с использованием следующего уравнения: где натяжение троса; – длина кабеля; – масса кабеля на единицу; – собственная частота кабеля.Следовательно, сила натяжения кабеля может быть определена на основе измерений физических свойств этого кабеля [17]. Однако этот метод не является строго применимым для осмотра кабеля моста из-за чрезмерного упрощения, игнорирующего жесткость на изгиб, провисание под собственным весом и другие усложняющие факторы, такие как неопреновые кольца, вязкие демпферы и переменная жесткость по длине.
Разработаны многочисленные методы измерения силы троса на основе вибрации. Например, Zui et al.разработал основанный на вибрации метод измерения сил кабеля с учетом как жесткости на изгиб, так и прогиба, присущих наклонному кабелю [18]. Cho et al. реализовал метод Зуи с использованием беспроводных сенсорных сетей [19]. В таблице 2 приведены некоторые системы мониторинга кабеля на основе акселерометра в разных странах.
В таблице 2 приведены некоторые системы мониторинга кабеля на основе акселерометра в разных странах.
2.3.4. Ультразвуковой контроль Методы ультразвукового контроля также широко используются при обследовании кабелей мостов. Ультразвуковое устройство состоит из передатчика, посылающего высокочастотные звуковые волны через образец, и приемника для захвата отраженного сигнала, а метод акустической эмиссии может обнаруживать обрыв провода в пассивном режиме.Дефекты материала в виде неоднородности в твердой среде отражают переданный сигнал приемнику как признак наличия дефектов. Desimone et al. [22] провели экспериментальное исследование ультразвуковой техники с использованием импульсной волны для проволоки с надрезами и канавками на разной глубине. Ультразвуковой метод применим для проверки кабелей, подключенных к параллельным проводам в зонах анкеровки, для обнаружения разрывов проводов и коррозии [12]. Этот метод был применен к семипроводным кабелям на 12 креплениях моста Конрейн в Алабаме, США [23, 24]. 2.3.5. Магнитные методы Магнитные датчики могут использоваться для измерения растягивающего напряжения в кабеле, потери металлической поверхности (LMA) и локальных повреждений (LF), таких как обрыв провода. Концептуальный чертеж электромагнитного (ЭМ) датчика показан на рисунке 5. ЭМ-датчик состоит из первичной обмотки и вторичной обмотки для измерения кажущейся относительной проницаемости и формализации электромагнитных характеристик стального стержня (т. Е. Образца).Когда в первичной катушке протекает импульсный ток, ферромагнитный материал намагничивается, и вдоль образца вводится импульсное магнитное поле. Относительная проницаемость является функцией натяжения кабеля. Относительная проницаемость () может быть рассчитана как где и – изменение индукционного и магнитного полей соответственно, – проницаемость свободного пространства [25]. (a) Концептуальный чертеж электромагнитного датчика [25] (b) Электромагнитный датчик, установленный на тросе [26] (a) Концептуальный чертеж электромагнитного датчика [25] (b) Электромагнитный датчик, установленный на подпорном тросе [26] Устройства утечки магнитного потока (MFL) часто используются для оценки степени коррозии и обнаружения локальных повреждений (LF) из-за внешних и внутренних разрывов проводов путем измерения потерь металлических поперечных элементов. Этот метод считается многообещающим методом контроля кабеля, поскольку LMA можно точно измерить под защитным покрытием кабеля неразрушающим способом за относительно короткое время [12]. Типичные применения устройств MFL включают контроль стальных тросов канатных дорог, шахтных подъемников и морских трубопроводов [13, 28, 29]. Существует ряд имеющихся в продаже магнитных датчиков для стальных тросов, которые можно использовать при обследовании мостовых кабелей. DMT GmbH разработала оборудование для магнитоиндуктивного тестирования мостовых кабелей (см. Рис. 8 (а)). Оборудование оснащено прочными головками с постоянными магнитами для канатов диаметром до 150 мм. Брандт разработал тросовую испытательную головку, предназначенную для контроля стальных тросов диаметром до 160 мм [37].Kündig AG производит три магнитные системы серии PMK для канатов диаметром до 125 мм [38]. Ropescan был разработан Британской исследовательской лабораторией угля (в настоящее время принадлежащей Lloyds Beal Ltd.) для проверки канатов с замкнутой катушкой шахтных подъемников [39]. Канадский центр минеральных и энергетических технологий (CANMET) и Технологический центр Норанды совместно разработали Magnograph II, оборудование для испытания троса с компьютерным управлением [34] (см. NDT Technologies производит головки магнитных датчиков MFL. Устройство может измерять LF и LMA канатов диаметром до 120 мм. Вес устройства менее 75 кг (Рисунок 8 (в)). Штутгартский университет в Германии разработал магнитные датчики, связанные с кольцевым массивом из двух наборов из 30 датчиков на эффекте Холла для применения на канатных дорогах, подвесных тросах мостов, судовых лифтах и кранах [42]. 2.3.6. Радиография Радиография используется для визуализации недр для обнаружения дефектов кабеля с помощью рентгеновских или гамма-лучей. (a) Концепция рентгеновского исследования кабеля (b) Рентгеновская пленка кабеля (a) Концепция рентгеновского исследования кабеля (b) Рентгеновская пленка кабеля Xu et al.сообщили, что рентгеновская радиография может применяться для обнаружения дефектов кабеля в свободных пролетах, но не применима для креплений [48]. Применение радиографии при обследовании кабеля моста также ограничено из-за возможности радиоактивной опасности для рабочего персонала во время осмотра, особенно на большой высоте кабельной опоры [1]. 3. Роботы для проверки кабелей Роботы для проверки кабелейРоботизированные системы могут перемещаться по кабельным системам моста, таким как мостовые кабели, трубы, стальные тросы и круглые столбы, для ремонта и технического обслуживания, а также для осмотра.В этом разделе представлены несколько роботизированных систем, которые можно использовать для проверки кабельных систем мостов. 3.1. Роботы для осмотра труб Li et al. разработал кабельный пневматический подъемный робот для обслуживания (PCMR) для покрытия и окраски трубных конструкций (см. рисунок 10 (а)) [44]. Робот для лазания с шестом (UT-PCR) был разработан Тегеранским университетом, Иран, с возможностью захвата шеста и вертикального перемещения (см. Рисунок 10 (b)) [45]. Робот состоит из трехстороннего симметричного тела треугольной формы с шестью конечностями, соединенными в его угловых точках посредством отдельных пружин растяжения.Механические конечности используются для захвата шеста. Колеса на нижних конечностях приводятся в действие двигателями постоянного тока, а колеса на верхних конечностях только направляют движение робота. Робот для проверки поверхности труб был разработан префектурным университетом Акита в Японии для проверки труб (рис. 10 (c)). Этот робот может перемещаться по фланцам, подниматься по вертикальным фланцам и перемещаться по нижней стороне трубы с помощью шести магнитных опорных колес. Робот для подъема и манипулирования шестом, разработанный Университетом Шарифа, Иран, может преодолевать изгибы и ветви шеста [49]. Робот состоит из трех основных частей корпуса, включая плоское основание с 3 степенями свободы, вращающееся по оси опорное основание и захваты. Робот приводится в действие тремя двигателями постоянного тока, управляемыми центральным компьютером через управляющие драйверы. 3.2. Роботы для проверки кабелей Кабельный робот ATIS, робот для лазания по кабелю, разработанный компанией Alpin Technik Leipzig, был разработан для установки различных модулей для различных целей проверки и обслуживания кабелей, включая визуальный осмотр и модули MFL для проверки и склеивания, а также модули сварки для техническое обслуживание (см. Mavis ReCreator – еще один робот для лазания по тросу, разработанный Tiefenbach GmbH (см. Рисунок 12). Этот робот имеет пять модулей для обслуживания покрытия кабеля, включая удаление покрытия, очистку, ремонт, нанесение покрытия и перемещение. Инструменты визуального контроля также могут быть установлены на роботе для проверки поверхности кабелей моста. Луо и др. (2005) разработали роботизированную систему, которая может проверять, очищать и красить мостовые кабели (см. Рисунок 13) [50]. Внутренняя рама, соединенная с подъемным модулем, может двигаться по тросу по спирали. Внешняя рама, соединенная с модулем обслуживания, уравновешивает робота, когда он перемещается, контролируя вес покрасочного ковша и аккумулятора. Мобильная роботизированная система для проверки линий электропередачи, разработанная Tokyo Electric Power и Toshiba, состоит из узла транспортного средства, направляющего рельса, узла манипулятора направляющего рельса и балансира [52]. 4. Разработка робота для проверки кабеля в Корее С 2010 года Министерство земли, транспорта и морских дел Кореи (MLTM) поддерживает исследовательскую инициативу по разработке роботизированной системы для проверки кабеля на мосту.Несмотря на то, что существует множество коммерчески доступных систем, о которых говорилось в предыдущих главах, все еще остаются проблемы, связанные с улучшением производительности системы инспекционного робота (например, скорости инспекции, физического размера, адаптируемости, управляемости и т. Д.). Роботизированная система состоит из трех основных подсистем, включая (i) подсистему поднимающегося робота, (ii) подсистему неразрушающего контроля и (iii) подсистему управления и анализа (см. Подсистема лазящего робота позволяет роботу перемещаться по тросу моста.Робот управляется инспекторами по беспроводной сети и может передавать данные датчиков, собранные с сенсорных модулей, в подсистему управления и анализа. Подсистема неразрушающего контроля состоит из двух сенсорных модулей, в том числе (i) магнитного сенсорного модуля, использующего устройства MFL для обнаружения внутренних дефектов проводов, таких как LF из-за разрывов проволоки и LMA из-за коррозии проволоки, и (ii) считывание на основе обработки изображений. модуль для обнаружения дефектов на поверхности кабеля. На рисунке 15 показаны конструкция и технические характеристики подсистемы альпинистского робота и подсистемы неразрушающего контроля.Для вантово-подвесных мостов и вантовых мостов были разработаны два типа системы подъемного робота. Это необходимо, так как вантовые мосты имеют наклонные кабели большего сечения (до 300 мм), а вантово-подвесные мосты имеют вертикальные подвесные тросы меньшего сечения (до 90 мм). 4.1. Подъемный робот и подсистемы управленияДля роботов для проверки кабеля обычно используются три подъемных механизма, включая магнитные, пневматические и электрические методы [53, 54].В данном исследовании был выбран электрический метод, обеспечивающий легкость управления и постоянное подъемное усилие. Доступна беспроводная связь между блоком поднимающегося робота и подсистемой управления и анализа для управления роботом и передачи данных датчиков. Роботизированный блок может управляться инспекторами на расстоянии до 600 м с помощью управляющей программы, показанной на Рисунке 16. 4.1.1. Робот для подвесного моста с тросом Важной целью конструкции робота с тросом и подвесным мостом было то, что робот должен подходить для подвесных тросов разного диаметра.Еще одна важная цель проектирования заключалась в том, чтобы робот имел достаточную подъемную силу для проверки вертикальных подвесных кабелей, а в случае непредсказуемого отключения электроэнергии необходимо эффективно противодействовать силе тяжести из-за собственного веса робота, чтобы избежать свободного падения. (а) Самоблокирующийся механизм (б) Лабораторное испытание самоблокирующейся системы (а) Самоблокирующийся механизм (б) Лабораторное испытание самоблокирующейся системы 4.1.2. Робот для вантовых мостов Подсистема для вантовых мостов была разработана для решения двух важных задач проектирования. Уретановые колеса используются для быстрого перемещения на тросах с улучшенным трением и уменьшением повреждения поверхности троса во время осмотра (см. Рисунок 19 (a)). Колесо в сборе состоит из колес, прикрепленных к пружинам, и проставок внутри внешней рамы для адаптации к различным калибрам кабелей. (a) Уретановые колеса (b) Блок управления (a) Уретановые колеса (b) Блок управления 4.2. Модуль магнитного зондирования подсистемы неразрушающего контроля Головка магнитного сенсора в подсистеме неразрушающего контроля состоит из двух модулей, включая (i) модуль намагничивания для создания поля магнитного потока и (ii) сенсорный модуль для измерения утечки магнитного потока, вызванной присутствием дефектов внутренней проволоки.Магнитная головка заключена в алюминиевый корпус размером. Внутренний диаметр корпуса рассчитан на стальные тросы диаметром до 85 мм (см. Рисунок 20 (а)). Модуль намагничивания создает однородное магнитное поле вокруг кабеля с парой ярмов, состоящей из четырех высокопрочных постоянных магнитов Nd-Fe-B (неодим 35) и пластины из углеродистой стали (см. Чувствительный модуль имеет два типа датчиков, включая датчики на эффекте Холла и катушечные датчики (см. Рисунок 21).Датчики на эффекте Холла имеют 14 каналов, расположенных вокруг кабеля моста для обнаружения НЧ, например обрыва внутреннего провода. Катушечные датчики имеют 2 канала для измерения общего магнитного потока, который является необходимой информацией для расчета LMA. Эти датчики подключены к бортовой системе сбора данных в блоке управления. Был проведен ряд лабораторных испытаний для проверки характеристик магнитного датчика. Образцы кабеля диаметром 76 мм и длиной 2 м имели девятнадцать 7-жильных жил, заключенных в трубу из ПВХ (см. Рисунок 22). (a) Испытательная установка (b) Поперечное сечение образца (a) Испытательная установка (b) Поперечное сечение образца Пять поврежденных случаев были испытаны путем разрезания прядей в разных местах для имитации LF . (а) Сигналы магнитного потока с внешними повреждениями (б) Сигналы магнитного потока с внутренними повреждениями (а) Сигналы магнитного потока с внешними повреждениями (б) Сигналы магнитного потока с внутренними повреждениями 4. 3. Модуль зондирования на основе обработки изображений подсистемы неразрушающего контроля 3. Модуль зондирования на основе обработки изображений подсистемы неразрушающего контроляМодуль зондирования на основе обработки изображений состоит из трех камер повышенной прочности, установленных вокруг кабеля для сбора цифровых изображений на поверхности кабеля (см. Рисунок 25). Модуль собирает необработанные изображения поверхности кабеля, когда взбирающийся робот движется по мостовому кабелю. Модуль имеет высокоскоростной беспроводной модем для передачи собранных цифровых изображений на серверный компьютер с подсистемой управления и анализа. (a) Три камеры в модуле зондирования на основе обработки изображений (b) Блок зондирования на основе обработки изображений, установленный на поднимающемся роботе (a) Три камеры в модуле зондирования на основе обработки изображений (b) Чувствительный элемент на основе обработки изображений, установленный на поднимающемся роботе Алгоритм обработки изображений на основе морфологической техники был разработан для обнаружения трещиноподобных дефектов на поверхности кабеля. Для обнаружения дефектов поверхности кабеля в виде трещин морфологическая операция, разработанная Jahanshahi et al. был использован [58]: где – исходное полутоновое изображение поверхности кабеля; – элемент структурирования, определяющий, какие соседние пиксели должны быть включены в каждую морфологическую операцию; морфологическое отверстие; морфологическое замыкание; – изображение, обработанное в градациях серого.Для обнаружения линейных дефектов (т. Е. Трещин) в качестве структурного элемента был выбран линейный пиксельный элемент [58]. Поскольку трещины на поверхности кабеля могут иметь любую ориентацию, во время морфологической операции использовался структурирующий элемент в виде линии с четырьмя углами: 0 °, 45 °, 90 ° и 135 °. После морфологической операции выходное изображение в градациях серого было обработано для преобразования в черный (т. После бинаризации изображение кабеля разделяется на пиксели трещины и пиксели фона. Однако в этом бинаризационном изображении между пикселями не установлена топологическая связь. Таким образом, сегментация проводилась на основе возможности соединения восьми соседних пикселей пикселя трещины, чтобы определить, какие пиксели трещины принадлежат каким трещинам. После сегментации шумные трещины были отфильтрованы на основе трех геометрических свойств сегментированных трещин, включая площадь трещины, максимальную длину трещины и эксцентриситет трещины.Здесь эксцентриситет трещины равен 0 для окружности и 1 для прямой. Серия лабораторных испытаний была проведена с использованием трех типов мостовых кабелей для оценки применимости алгоритма обработки изображений для различных условий проверки кабеля: обычный кабель (тип I), кабель, намотанный спиральной проволокой (тип II), и кабель с углублениями. К тестовым изображениям применялся алгоритм обработки изображений.Трещины на кабелях разных типов были точно идентифицированы, и результаты испытаний образцов показаны на Рисунке 28. Обнаруженные дефекты показаны красными пикселями в зеленых прямоугольниках. Параметры, используемые в алгоритме обнаружения трещин на основе обработки изображений, приведены в Таблице 3. В настоящее время проводятся испытания реальных мостовых кабелей.
5. ЗаключениеВ этом документе представлен обзор современной практики проверки кабелей мостов и робота для проверки кабелей, разработанного в Корее. Два типа роботизированных систем были разработаны для наклонных тросов в вантовых мостах и вертикальных подвесных тросов в подвесных мостах. Аппаратные средства роботов для проверки кабелей имеют следующие уникальные особенности: (i) Максимальный диаметр кабеля составляет 90 мм и 300 мм, а максимальная полезная нагрузка составляет 25 кг и 45 кг для подвесных тросов и подвесных тросов, соответственно.(ii) Робот управляется с помощью и передает данные датчиков в систему управления через беспроводную связь. (iii) Самоблокирующаяся система предназначена для предотвращения обратного воздействия на двигатель и рассеивания силы свободного падения для непредвиденного отключения электроэнергии. Роботизированная система контроля кабеля была испытана в лабораторных и полевых экспериментах на обнаружение внутренних дефектов проводов с помощью магнитного датчика и поверхностных дефектов кабелей мостовых кабелей с использованием зондирования на основе обработки изображений. Роботизированная система в настоящее время оценивается в реальных полевых условиях на предмет мобильности робота, обнаруживаемости дефектов и применимости в полевых условиях. Мобильность – важная составляющая конструкции для быстрого осмотра кабеля с неровными поверхностями и препятствиями на мостовых кабелях. БлагодарностиЭто исследование было поддержано Министерством земли, инфраструктуры и транспорта Кореи (MOLIT) в рамках основного исследовательского проекта 4 Центра исследований и разработок сверхдлинных мостов (08 CTIP-E01).Это исследование также было частично поддержано Национальным научным фондом США (№ 16206032). Авторы заявляют об отсутствии конфликта интересов относительно публикации данной статьи. Калифорнийские студенты используют совместную робототехнику для строительства моста АрройоСтуденты Школы архитектуры Университета Южной Калифорнии спроектировали и построили сложный мост в Лос-Анджелесе, используя полуавтоматический процесс, который сокращает строительный мусор. 70-футовый мост Арройо начал свою жизнь как спекулятивный проект в студии дизайна и строительства Университета Южной Калифорнии, возглавляемой ведущим исследователем Р. Скоттом Митчеллом. Мост Арройо был создан в результате совместного роботизированного процесса. Он представляет собой сложную сеть стальных труб с многослойной структурой, вдохновленной прожилками листьев и ветвями деревьев. Конструкция моста стала результатом испытания, в ходе которого 13 студентов бакалавриата получили задание спроектировать пешеходный мост с использованием инструментов параметрического проектирования. Хотя дизайн изначально был гипотетическим, он должен был соответствовать определенному месту в каньоне Лос-Анджелеса, обеспечивая доступ к видам верхушек деревьев с обеих сторон. Он сделан из сложной сети стальных труб, полученной с помощью параметрического проектирования. Сложная геометрия означала, что конструкцию было бы практически невозможно построить с помощью традиционных ручных методов производства. Работая с Martin Architecture and Design Workshop (Madworkshop) и компанией Autodesk, занимающейся разработкой программного обеспечения, группа начала исследовать, как это можно сделать с помощью роботов. «Несмотря на то, что окончательная конструкция стали возможна, геометрическая сложность и асимметрия потребовали бы непрактичного количества креплений, чтобы удерживать элементы конструкции на месте перед сваркой», – сказал Митчелл Dezeen. Структура обозначена прожилками на листьях«В течение нескольких недель после студии я начал думать о перспективе размещения и удержания элементов конструкции с минимальным креплением или без него. Промышленный робот-манипулятор оказался лучшим, если не единственным, решением. ,” он продолжил. В процессе, разработанном группой, сварщики работали с промышленными роботами-манипуляторами, которые удерживали детали в необходимом положении. Роботы могут достичь гораздо более точного позиционирования, чем при использовании опорной опалубки. Этот вид процесса известен как совместная робототехника, потому что вместо того, чтобы заменять работников автоматизацией, они работают вместе над одной и той же задачей. Сварщики работали с роботами, чтобы сплавить около 600 стальных деталей.«Вначале мы поняли, что роботы намного точнее, чем физический мир», – сказал Митчелл. «Неточность самых простых материалов может сбросить день работы». «Используя эти методы, мы смогли выдержать допуск менее одного миллиметра на роботизированных узлах, что намного меньше максимального допуска инженеров в шесть миллиметров.« «Постцифровая архитектура будет грубой, предварительной и создаваемой роботами»Таким образом они сварили 600 деталей из трубной стали А500 и листовой стали А572 в 30 секций. Затем они были собраны вместе на месте. Роботы эффективно устранили необходимость в опалубке в процессе сварки, сокращая обычные отходы материала. Мост был собран на месте из 30 секций.Стальной лом был также сведен к минимуму за счет прецизионной предварительной резки элементов конструкции с использованием многоосных станков для лазерной и гидроабразивной резки труб.В общей сложности в результате проекта было образовано менее 500 кг строительного мусора, который был переработан. Митчелл говорит, что хотя проект можно было бы выполнить с использованием традиционных приспособлений и технологий изготовления, он был бы намного дороже, расточительнее и гораздо менее точным. Мост простирается на 70 футов через каньон Лос-Анджелеса. «Строительный каркас, вероятно, стоил бы больше, чем сам мост, только для того, чтобы его списали или переработали после завершения», – сказал он Dezeen. «Я бы оценил общее количество в две-три тонны, по крайней мере, половина из которых была бы отправлена на свалку». Первоначально мост был гипотетическим проектом, но в итоге был построен.Коллаборативная робототехника сочетает в себе точность робототехники с человеческим творчеством и адаптируемостью. «Любая автоматизированная система часто бывает очень хрупкой», – сказала Хизер Керрик, ведущий исследователь Autodesk Research Robotics Lab. “Как только что-то выходит из строя или неожиданно, вся система может выйти из строя.« «В ответ на это промышленность часто пыталась уменьшить любой источник хаоса, – продолжила она. «Вместо этого этот проект допускает этот хаос, а затем опирается на людей, которые помогают адаптироваться и спокойно справляться с этим хаосом». Его создали студенты Школы архитектуры Университета Южной Калифорнии совместно с Madworkshop. На то, чтобы пройти от проекта до завершения моста Арройо, потребовалось шесть лет. Его стальная конструкция покрыта красновато-коричневым долговечным покрытием, которое дополняет окружающую растительную жизнь. На предыдущем курсе USC, который также проводили Madworkshop и Митчелл, студенты проектировали приюты для бездомных жителей Лос-Анджелеса, включая тележку для покупок, превращенную в палатку, и крошечный домик из мусора. Фотография сделана Иваном Бааном. Кредиты проекта: Руководитель проекта: Джон Юниак Полуавтономный мобильный робот для осмотра мостовhttps: // doi.org / 10.1016 / j.autcon.2018.02.013Получить права и контентОсновные моменты
AbstractВ этой статье представлена полуавтономная роботизированная система, предназначенная для проверки автомобильных и железнодорожных мостов. До сих пор инспекции мостов выполнялись вручную рабочими, которые либо поднимались и спускались по спускам, либо использовали так называемые мобильные отрицательные сборщики вишни или специальные мобильные сборки. Это опасная и утомительная работа, которую необходимо выполнять в ночное время или когда движение по мосту прекращено из соображений безопасности.Установка мобильных узлов требует больших затрат времени и средств, и они становятся несовместимыми с современными конструкциями. Кроме того, ручная проверка требует подсчета, измерения, определения местоположения и фотографирования мелких трещин. Качество этих ручных операций зависит не только от опыта, но и от уровня усталости рабочих. Роботизированная система инспекции, предлагаемая в этой статье, состоит из трех основных компонентов: индивидуального грузовика, мобильного роботизированного механизма, который делает снимки всей интересующей области, и программного обеспечения, которое автоматически связывает эти изображения с CAD-моделью моста. После этого в офисе пользователи просматривают изображения поверхностей моста с помощью программного обеспечения САПР и специального плагина для обнаружения, измерения и комментирования дефектов моста для последующей обработки. Результат суммируется в отчете, созданном программным обеспечением. Описываются требования и механическая конструкция этой системы, а также предоставляется обзор проверок, проведенных с ее помощью. Ключевые словаМобильная робототехника Осмотр мостов Рекомендуемые статьиЦитирующие статьи (0) Полный текст© 2018 Elsevier B.V. Все права защищены. Рекомендуемые статьиЦитирующие статьиКак построить робота УчебникиСХЕМАТИКА – КАК РАБОТАЮТ H-МОСТЫ H-Bridge – это связующее звено между цифровой схемой и механическим действием. Компьютер отправляет двоичные команды, а исполнительные механизмы высокой мощности делают то же самое. Чаще всего H-образные мосты используются для управления направлением вращения двигателей постоянного тока. И если вы покупаете потенциально дорогой мотор-привод , вам нужен H-мост для управления любым роботом с мотором. Это быстро набросанная схема H-Bridge с вспомогательной схемой. Используйте транзисторы PNP для двух верхних полевых МОП-транзисторов и полевые МОП-транзисторы NPN для двух нижних (тех, которые подключены к земле). В противном случае может случиться что-то плохое. Сначала давайте поговорим о том, что транзистор есть. Эти изящные фишки произвела революцию в электронной промышленности, и вы будете сильно подавлены найти что-то электронное, в котором нет хотя бы нескольких тысячи таких в них. Так что они делают? Они могут контролировать поток электронов путем приложения к ним напряжения.Сантехнический эквивалент будет водяной клапан. Вращая клапан, очень большой поток воды можно легко контролировать. Таким образом, чтобы управлять полевым МОП-транзистором, вы подаете напряжение на затвор (от вашего микроконтроллер ), и внезапно через два других контакта проходит ток электронов. Подключите двигатель (M) к одному из штифтов, и ваш робот готов к работе. На схеме выше вы заметите буквы A и B .Это ваши две линии управления, на которые вы подаете это логическое напряжение. Поскольку у вас есть два контакта и только бинарный элемент управления, возможны четыре события. A = 0 B = 0: ничего не происходит, двигатель выключен Вот графическое изображение логической схемы H-моста: Итак, теперь давайте поговорим о том, как работать с полевыми МОП-транзисторами.В основном все вы Вам необходимо присоединить вентиль к вашему цифровому выходу вашего контроллера. Когда цифровой выход включен, на затвор будет подаваться 5В, поворачивая MOSFET включен. Однако лучше усилить что 5V на значение выше, и я объясню почему. Напряжение затвора управляет внутренним полевым МОП-транзистором. сопротивление. Нулевое напряжение делает сопротивление слишком высоким для работы. Очень высокое напряжение имеет очень низкое сопротивление. Сопротивление ведет к потере энергии термически.Это означает, что ваш MOSFET нагреется и, возможно, сгорит. из. Взгляните на изображение MOSFET выше, и вы заметите мой палец. напечатайте в нем. Вот что происходит, когда вы касаетесь горячего полевого МОП-транзистора – боль! Так хотя вам не нужно увеличивать напряжение затвора, лучше всего это сделать. Также следует поставить на него радиатор . Убедитесь, что в MOSFET встроено защитных диодов . Если нет, установите их на вашей схеме, как показано. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5
5 Механизм магнитных датчиков основан на чувствительности магнитного поля к наличию повреждений, таких как коррозия и трещины. Следовательно, изменение магнитного поля вдоль кабеля указывает на наличие дефектов.
Механизм магнитных датчиков основан на чувствительности магнитного поля к наличию повреждений, таких как коррозия и трещины. Следовательно, изменение магнитного поля вдоль кабеля указывает на наличие дефектов. площадь сечения (LMA) [12].Механизм устройств MFL показан на рисунке 6. В неповрежденном состоянии поле магнитного потока, создаваемое с помощью магнитов, остается однородным. В поврежденном состоянии потеря металла из-за коррозии или поломки проволоки нарушает магнитное поле, что приводит к неоднородным магнитным потокам. Возмущение магнитного поля можно обнаружить с помощью датчика Холла, помещенного между полюсами магнитов. Величина сигнала датчика Холла пропорциональна утечке магнитного потока [15]. Следовательно, на точность измерения LMA в значительной степени влияет однородность магнитного потока вокруг стального кабеля.Обычно используется сильный постоянный магнит или электромагнит.
площадь сечения (LMA) [12].Механизм устройств MFL показан на рисунке 6. В неповрежденном состоянии поле магнитного потока, создаваемое с помощью магнитов, остается однородным. В поврежденном состоянии потеря металла из-за коррозии или поломки проволоки нарушает магнитное поле, что приводит к неоднородным магнитным потокам. Возмущение магнитного поля можно обнаружить с помощью датчика Холла, помещенного между полюсами магнитов. Величина сигнала датчика Холла пропорциональна утечке магнитного потока [15]. Следовательно, на точность измерения LMA в значительной степени влияет однородность магнитного потока вокруг стального кабеля.Обычно используется сильный постоянный магнит или электромагнит. Техника контроля MFL также применялась к различным вантовым мостам [30, 31].На Рисунке 5 (b) показана система MFL, применяемая при осмотре подвесного кабеля для моста Йонг-Чон, Корея [32] (см. Рисунок 7).
Техника контроля MFL также применялась к различным вантовым мостам [30, 31].На Рисунке 5 (b) показана система MFL, применяемая при осмотре подвесного кабеля для моста Йонг-Чон, Корея [32] (см. Рисунок 7). Рисунок 8 (b)). Магнограф может работать только с датчиками Холла, которые выдают сигнал, не зависящий от скорости, и поэтому могут работать на очень низких скоростях.Intron Plus [32] и лаборатория LRM [40] производят испытательные головки, которые могут проверять как плоские, так и круглые стальные тросы. Эти устройства обычно применяются в канатах шахтных подъемников, на морских платформах, канатных дорогах, кранах, подъемниках и мостовых тросах [41].
Рисунок 8 (b)). Магнограф может работать только с датчиками Холла, которые выдают сигнал, не зависящий от скорости, и поэтому могут работать на очень низких скоростях.Intron Plus [32] и лаборатория LRM [40] производят испытательные головки, которые могут проверять как плоские, так и круглые стальные тросы. Эти устройства обычно применяются в канатах шахтных подъемников, на морских платформах, канатных дорогах, кранах, подъемниках и мостовых тросах [41]. Рентгеновские лучи производятся с помощью высоковольтной рентгеновской трубки, а гамма-лучи производятся с помощью радиоизотопа (см. Рисунок 9 (а)). Краткое изложение технологий подземного изображения для железобетона можно найти в [43]. Рентгенография обычно обеспечивает двумерную томографию для изображений поперечного сечения трехмерного объекта (см. Рисунок 9 (b)).
Рентгеновские лучи производятся с помощью высоковольтной рентгеновской трубки, а гамма-лучи производятся с помощью радиоизотопа (см. Рисунок 9 (а)). Краткое изложение технологий подземного изображения для железобетона можно найти в [43]. Рентгенография обычно обеспечивает двумерную томографию для изображений поперечного сечения трехмерного объекта (см. Рисунок 9 (b)). Робот оснащен самоблокирующимся механизмом, предотвращающим соскальзывание с шеста.
Робот оснащен самоблокирующимся механизмом, предотвращающим соскальзывание с шеста. рисунок 11).Робот-альпинист рассчитан на кабель разного диаметра от 24 мм до 350 мм. Относительно короткое время установки от 5 до 15 минут является преимуществом этой системы.
рисунок 11).Робот-альпинист рассчитан на кабель разного диаметра от 24 мм до 350 мм. Относительно короткое время установки от 5 до 15 минут является преимуществом этой системы. Рисунок 14).
Рисунок 14). Подробное описание каждой подсистемы будет представлено в следующих подразделах.
Подробное описание каждой подсистемы будет представлено в следующих подразделах. Для достижения этих целей конструкции используются электрические двигатели постоянного тока для приведения в действие роботизированной системы на подвесных кабелях. В роботизированной системе использовался пантографический механизм для кабелей различного калибра и самоблокирующийся механизм на случай отключения электроэнергии (см. Рисунок 17).Самоблокирующаяся система была разработана для предотвращения обратного воздействия на двигатель и уменьшения ускорения падения при отключении электроэнергии. Используется простая зубчатая система, которая состоит из дифференциалов, включая червячные и шестерни, а также червячные колеса, прикрепленные к дисковым амортизаторам [55, 56].
Для достижения этих целей конструкции используются электрические двигатели постоянного тока для приведения в действие роботизированной системы на подвесных кабелях. В роботизированной системе использовался пантографический механизм для кабелей различного калибра и самоблокирующийся механизм на случай отключения электроэнергии (см. Рисунок 17).Самоблокирующаяся система была разработана для предотвращения обратного воздействия на двигатель и уменьшения ускорения падения при отключении электроэнергии. Используется простая зубчатая система, которая состоит из дифференциалов, включая червячные и шестерни, а также червячные колеса, прикрепленные к дисковым амортизаторам [55, 56]. Во-первых, у робота должно быть достаточно силы подъема, чтобы подниматься по наклонным тросам. Во-вторых, подъемный робот должен иметь возможность возбуждать трос для проверки амортизаторов троса, динамический отклик которых отдельно измеряется с помощью акселерометров, установленных на тросах. Таким образом, система приведения в действие лазающего робота состоит из двух модулей: (i) модуля приведения в действие при подъеме и (ii) модуля возбуждения кабеля (см. Рисунок 18 (a)) [57].Модуль активации подъема имеет два электродвигателя для подъема на роботизированный блок на тросах (см. Рисунок 18 (b)). Модуль возбуждения кабеля состоит из возбудителя кабеля, связанного с устройством пневматической фиксации для надежного захвата блока робота во время вибрации кабеля (см. Рисунок 18 (c)).
Во-первых, у робота должно быть достаточно силы подъема, чтобы подниматься по наклонным тросам. Во-вторых, подъемный робот должен иметь возможность возбуждать трос для проверки амортизаторов троса, динамический отклик которых отдельно измеряется с помощью акселерометров, установленных на тросах. Таким образом, система приведения в действие лазающего робота состоит из двух модулей: (i) модуля приведения в действие при подъеме и (ii) модуля возбуждения кабеля (см. Рисунок 18 (a)) [57].Модуль активации подъема имеет два электродвигателя для подъема на роботизированный блок на тросах (см. Рисунок 18 (b)). Модуль возбуждения кабеля состоит из возбудителя кабеля, связанного с устройством пневматической фиксации для надежного захвата блока робота во время вибрации кабеля (см. Рисунок 18 (c)). Блок управления расположен в нижней части робота для обеспечения устойчивости позы во время движения (см. Рисунок 19 (b)).
Блок управления расположен в нижней части робота для обеспечения устойчивости позы во время движения (см. Рисунок 19 (b)). Рисунки 20 (b) и 20 (c). ).
Рисунки 20 (b) и 20 (c). ). На рисунке 23 показаны сигналы магнитного потока, измеренные с помощью семи датчиков Холла. Результат теста показывает, что величина датчика пропорциональна близости к месту повреждения. После того, как необработанные данные были собраны с помощью датчиков MFL, данные были обработаны в следующих процедурах: (i) применялась фильтрация нижних частот для удаления высокочастотного содержимого; (ii) был определен порог для величины сигнала датчиков эффекта Холла путем калибровки с использованием лабораторной испытательной установки; (iii) местоположения НЧ были идентифицированы посредством визуализации контурного картирования обработанных данных MFL относительно порога на поперечном сечении кабеля (см. Рисунок 24).После проведения лабораторных испытаний датчик MFL был использован для полевых испытаний на Большом мосту Сохэ в Корее. Измеренный магнитный поток вдоль кабелей не показал значительных колебаний, а это означает, что в тестовых кабелях нет резких изменений.
На рисунке 23 показаны сигналы магнитного потока, измеренные с помощью семи датчиков Холла. Результат теста показывает, что величина датчика пропорциональна близости к месту повреждения. После того, как необработанные данные были собраны с помощью датчиков MFL, данные были обработаны в следующих процедурах: (i) применялась фильтрация нижних частот для удаления высокочастотного содержимого; (ii) был определен порог для величины сигнала датчиков эффекта Холла путем калибровки с использованием лабораторной испытательной установки; (iii) местоположения НЧ были идентифицированы посредством визуализации контурного картирования обработанных данных MFL относительно порога на поперечном сечении кабеля (см. Рисунок 24).После проведения лабораторных испытаний датчик MFL был использован для полевых испытаний на Большом мосту Сохэ в Корее. Измеренный магнитный поток вдоль кабелей не показал значительных колебаний, а это означает, что в тестовых кабелях нет резких изменений. Алгоритм состоит из нескольких шагов, включая (i) морфологическую операцию, (ii) бинаризацию изображения, (iii) сегментацию изображения и (iv) фильтрацию шума. Процедуры алгоритма обработки изображений показаны на рисунке 26.
Алгоритм состоит из нескольких шагов, включая (i) морфологическую операцию, (ii) бинаризацию изображения, (iii) сегментацию изображения и (iv) фильтрацию шума. Процедуры алгоритма обработки изображений показаны на рисунке 26. кабель (тип III) (см. рисунок 27). Линии были отмечены черной ручкой в различных направлениях для имитации трещин на испытательном кабеле на макете.
кабель (тип III) (см. рисунок 27). Линии были отмечены черной ручкой в различных направлениях для имитации трещин на испытательном кабеле на макете. 958
958 Следующие результаты были получены при неразрушающем контроле.(i) Магнитные датчики могут использоваться для обнаружения обрыва внутреннего провода путем измерения изменения магнитного потока с использованием комбинации двух датчиков, включая 14-канальные датчики на эффекте Холла и двухканальные катушечные датчики. (ii) Модуль магнитного датчика был упакован в прочный алюминиевый корпус. Общий вес магнитного датчика составлял менее 20 кг. (Iii) Датчики, основанные на обработке изображений, могут использоваться для обнаружения дефектов поверхности в виде трещин с различной ориентацией на поверхности кабеля. Алгоритм обнаружения трещин был экспериментально подтвержден с использованием трех типов кабелей, включая обычные кабели, кабели, намотанные спиральными проводами, и кабель с углублениями.
Следующие результаты были получены при неразрушающем контроле.(i) Магнитные датчики могут использоваться для обнаружения обрыва внутреннего провода путем измерения изменения магнитного потока с использованием комбинации двух датчиков, включая 14-канальные датчики на эффекте Холла и двухканальные катушечные датчики. (ii) Модуль магнитного датчика был упакован в прочный алюминиевый корпус. Общий вес магнитного датчика составлял менее 20 кг. (Iii) Датчики, основанные на обработке изображений, могут использоваться для обнаружения дефектов поверхности в виде трещин с различной ориентацией на поверхности кабеля. Алгоритм обнаружения трещин был экспериментально подтвержден с использованием трех типов кабелей, включая обычные кабели, кабели, намотанные спиральными проводами, и кабель с углублениями. Обнаруживаемость различных типов внутренних и внешних дефектов мостовых кабелей должна быть подтверждена в реальных полевых условиях. Робот для проверки мостов должен быть применим в различных полевых условиях.
Обнаруживаемость различных типов внутренних и внешних дефектов мостовых кабелей должна быть подтверждена в реальных полевых условиях. Робот для проверки мостов должен быть применим в различных полевых условиях.