
3. Динамика материальной точки и поступательного движения твердого тела Основные формулы
,
где -масса материальной точки, – скорость движения.
,
где – тангенциальное (касательное) ускорение,
– нормальное (центростремительное) ускорение.
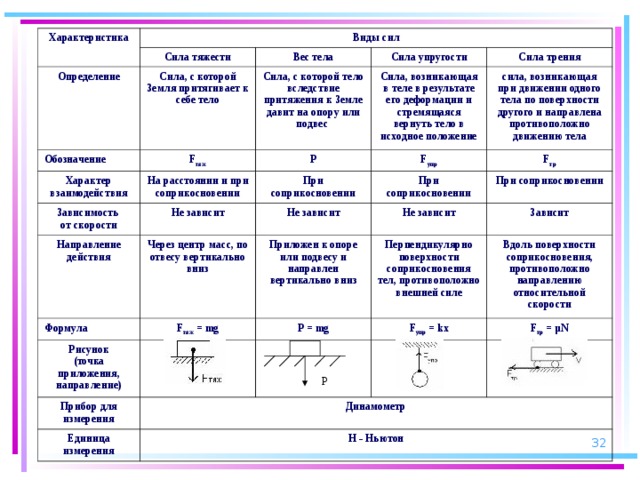
где – коэффициент трения скольжения; – сила нормального давления.
Сила упругости:
,
где – величина деформации; – коэффициент жесткости.
,
где – гравитационная постоянная, и – массы взаимодействующих точек, – расстояние между точками.
где – число материальных точек (или тел), входящих в систему.
,
где — проекция силы на направление
перемещения; — угол между направлениями силы и
перемещения.
где – работа за промежуток времени .
, или .
.
,
где – ускорение свободного падения.
.
.
.
Задача 1. На шнуре, перекинутом через неподвижный блок, подвешены грузы массами и (). Считаем нить и блок невесомыми и пренебрегаем трением в блоке. С каким ускорением движутся грузы? Какова сила натяжения шнура во время движения?
Дано: Решение:
,; (). | Делаем рисунок, расставляем силы, действующие на каждое тело: Рис.2.1 |
Записываем второй закон Ньютона для каждого тела в векторной форме:
Поскольку
,
считаем, что тело массой движется вниз, а тело массой
–
вверх. Ось совпадает с направлением ускорения.
Записываем второй закон Ньютона для
каждого тела в проекции на направление
оси
:
Ось совпадает с направлением ускорения.
Записываем второй закон Ньютона для
каждого тела в проекции на направление
оси
:
Складывая почленно эти уравнения, получаем:
.
Подставляя это выражение в одно из уравнений системы, получаем выражение для силы натяжения:
.
Задача 2. В установке (см. рис.2.2) угол наклонной плоскости с горизонтом , массы тели. Считая нить и блок невесомыми, определите ускорение, с которым движутся тела, и силу натяжения нити, если телоопускается. Коэффициент трения телао плоскость равен 0,1.
Дано: Решение:
; ; ; . | Делаем рисунок, расставляем силы, действующие на каждое тело: |
Записываем второй закон Ньютона для каждого тела в векторной форме: | |
Для каждого тела устанавливаем оси координат и записываем второй закон Ньютона для каждого тела в проекциях на направления и :
.
Учитывая, что , получаем систему:
Складываем почленно эти уравнения:
.
Отсюда получаем выражение для ускорения:
.
Подставляем числа:
.
Из уравнения 2) выражаем силу натяжения: .
Подставляем числа: .
Ответ: ;.
Задача 3. Движущееся тело массой ударяется о неподвижное тело массой . Считая удар упругим и центральным, определите, какую часть своей первоначальной кинетической энергии первое тело передает второму при ударе. Задачу решите сначала в общем виде, а затем рассмотрите случаи: 1) ; 2) .
Дано: ,, ,; 1); 2). | Решение: Пусть
скорость первого тела до удара . |
– ? |
 Скорость второго тела до удара .
Кинетическая энергия первого тела до
удара
.
Предположим, что скорость второго
тела после удара равна . Тогда кинетическая энергия второго
тела после удара
,
а отношение энергий
Скорость второго тела до удара .
Кинетическая энергия первого тела до
удара
.
Предположим, что скорость второго
тела после удара равна . Тогда кинетическая энергия второго
тела после удара
,
а отношение энергий. (1)
Для определения скорости второго тела после удара запишем закон сохранения импульса в проекции на направление движения и закон сохранения механической энергии, полагая, что система тел замкнута и в ней действуют только консервативные силы.
(2)
Преобразуем систему (2) к виду
(3)
Разделив одно на другое выражения системы (3), получим , а после подстановки скорости в первую формулу системы (3) получим
. (4)
Отношение энергий (1) приобретает вид
.
1) Если , то =1. При равенстве масс первое тело полностью отдает энергию второму, т.е. первое тело остановится, а второе начнет двигаться со скоростью первого тела.
2) Если , то .
Ответ: 1) =1; 2) .
Динамика в физике, теория и онлайн калькуляторы
Динамика в физике, теория и онлайн калькуляторыОпределение
Динамикой называют раздел механики, рассматривающий причины механического движения. Иначе говоря, динамика – это часть механики, которая изучает движение тела, связывая характер перемещения тела с действующими на него силами.
Законы классической динамики были сформулированы И. Ньютоном и имеют его имя. Основные законы динамики являются обобщением экспериментальных данных. Эти законы следует рассматривать в совокупности, как взаимосвязанные. Экспериментальной проверке стоит подвергать не каждый закон отдельно, а всю систему законов динамики целиком.
Экспериментальной проверке стоит подвергать не каждый закон отдельно, а всю систему законов динамики целиком.
Основная задача динамики
Многие задачи науки и техники формулируют следующим образом: имеется тело, известны силы, действующие на тело, следует сформулировать закон движения тела, то есть записать координаты рассматриваемого тела как функции времени.
И так, кратко основную задачу динамики определим так: найти закон движения материальной точки (тела), при известных силах, действующих на нее.
Для решения такой задачи при помощи основного закона динамики (второго закона Ньютона) определяют ускорение движения точки. Затем при помощи кинематических уравнений находят функции скорости и координат зависящих от времени. Такие функции позволяют предсказывать поведение частицы в любой момент времени.
Решение этой задачи в общем виде может быть проблематично. Частное решение любой задачи в классической динамике можно получить при помощи численных методов приближенно, но заданной степенью точности.
Выделяют и такую задачу динамики, как определение равнодействующей сил, приложенных к телу (материальной точке) при известном характере его движения.
Для определения закона движения материальной точки необходимы:
- Сила, которая действует на материальную точку. Ее можно задать как функцию времени или координат.
- Начальные условия: координаты и скорость точки в некоторый момент времени. Вместо начальной скорости иногда используют начальный импульс.
Основные законы классической динамики
Законы Ньютона составили основу динамики, и по сей день играют в ней исключительную роль.
- Первый закон Ньютона: Если тело не взаимодействует с другими телами или действие других тел скомпенсировано, то скорость тела не изменяется ни по модулю, ни по направлению.
 Тело перемещается равномерно и прямолинейно.
Тело перемещается равномерно и прямолинейно. - Второй закон Ньютона: если тело движется с ускорением, по отношению к инерциальной системе отсчета, то на него действует сила. Сила, вызывает ускорение, величина которого пропорциональна модулю этой силы. Направление ускорения совпадает с направлением, действующей силы.
 Тело перемещается равномерно и прямолинейно.
Тело перемещается равномерно и прямолинейно.Выражение (1)- это второй закон Ньютона в классической динамике.
Этот закон можно записать в иной форме:
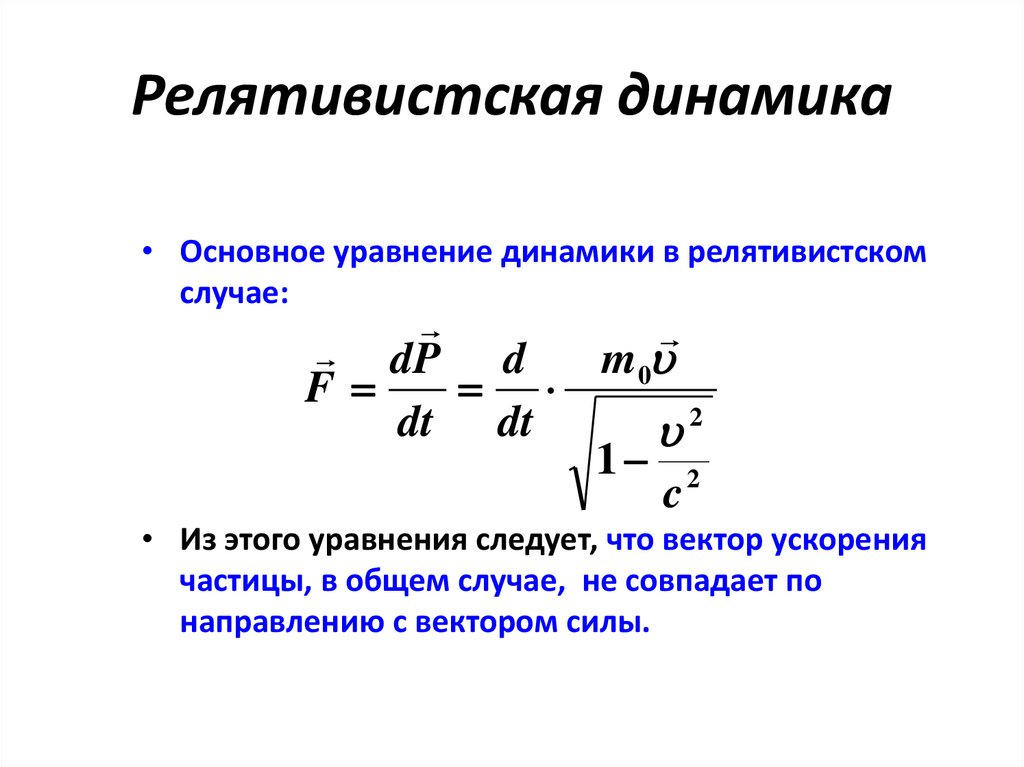
\[\overline{F}=\frac{d\left(m\overline{v}\right)}{dt}=\frac{d\left(\overline{p}\right)}{dt}\left(2\right),\]
где $\overline{p}=m\overline{v}$ – импульс тела. Тогда второй закон Ньютона формулируют так: сила равна производной от импульса по времени – это наиболее общая формулировка основного закона динамики.
- Третий закон Ньютона: Силы взаимодействия тел равны по величине, направлены вдоль одной прямой и имеют противоположные направления.
То есть, если тело 1 действует на тело 2 с силой ${\overline{F}}_{12}$, то в этот же момент тело 2 действует на тело 1 с силой ${\overline{F}}_{21}$, при этом:
\[{\overline{F}}_{12}=-{\overline{F}}_{21}\left(3\right). 2}}}\left(5\right).\]
2}}}\left(5\right).\]
Следует иметь в виду, что сила и ускорение точки в релятивистском случае совпадают. Сила совпадает по направлению с изменением импульса.
Примеры задач с решением
Пример 1
Задание. Железнодорожный вагон нагружен песком. Начальная масса вагона с грузом составляет $m_n$ кг. Вагон движется прямолинейно из состояния покоя под действием силы тяги равной $\overline{F}$. Эта сила направлена горизонтально и она постоянна (рис.1). В дне вагона имеется отверстие, через него высыпается песок с постоянной скоростью $\sigma \ \frac{кг}{с}$. Запишите функцию скорости в зависимости от времени ($v(t)$). Силой трения пренебречь.
Решение. Запишем второй закон Ньютона для сил, действующих на вагон:
\[m\overline{g}+\overline{N}+\overline{F}=m\overline{a}\left(1.1\right).\]
Запишем проекцию уравнения (1.1) на ось X:
\[F=ma\ \left(1. 2\right),\]
2\right),\]
где $m=m_n-\sigma t$. Выразим ускорение из (1.2):
\[a=\frac{F}{m_n-\sigma t}\left(1.3\right).\]
Учитывая кинематическое уравнение вида:
\[a=\frac{dv}{dt}\left(1.4\right)\]
скорость найдем как:
\[v\left(t\right)=\int{a\left(t\right)dt=\int{\frac{F}{m_n-\sigma t}dt=\frac{F}{\sigma }}}{\ln \left(\frac{m_n}{m_n-\sigma t}\right)\ }+C\left(1.5\right).\]
Из начального условия ($v\left(0\right)=0$) найдем постоянную интегрирования $C$:
\[v\left(0\right)=\frac{F}{\sigma }{ln \left(\frac{m_n}{m_n-\sigma \cdot 0}\right)\ }+C=0\to C=0.\]
Получаем:
\[v\left(t\right)=\frac{F}{\sigma }{ln \left(\frac{m_n}{m_n-\sigma t}\right)\ }.\]
Ответ. $v\left(t\right)=\frac{F}{\sigma }{ln \left(\frac{m_n}{m_n-\sigma t}\right)\ }$
Пример 2
Задание. 2}$
2}$
Читать дальше: закон сохранения импульса.
236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Шпаргалки по физике (формулы)
Шпаргалка
- формат doc
- размер 120.38 КБ
- добавлен 04 декабря 2010 г.
Площади.
Кинематика.
Динамика.
Механика жидкостей и газов.
Колебания и волны. Звук.
Молекулярно-кинетическая теория.
Свойства газов.
Электричество и магнетизм.
Оптика.
Квантовая физика.
Похожие разделы
- Абитуриентам и школьникам
- ВНО / ЗНО
- ЗНО по физике
- Абитуриентам и школьникам
- ЕГЭ
- ЕГЭ по физике
- Абитуриентам и школьникам
- ОГЭ / ГИА / ДПА
- ОГЭ / ГИА / ДПА по физике
- Абитуриентам и школьникам
- Физика
- Академическая и специальная литература
- Механика
- Механика жидкостей и газов
- Академическая и специальная литература
- Педагогика
- Методики преподавания
- Методика преподавания физики
- Академическая и специальная литература
- Радиоэлектроника
- Антенная и СВЧ техника
- Электромагнитные поля и волны
- Академическая и специальная литература
- Радиоэлектроника
- Радиофизика
- Учебные планы, программы и нормативная документация
- Для средней школы
- Физика
- Учебные планы, программы и нормативная документация
- Физика
Смотрите также
Шпаргалка
- формат pdf
- размер 1. 58 МБ
- добавлен 21 января 2012 г.
 58 МБ
58 МБМ.: РИОР, 2009. – 32 с. В шпаргалке приведены все основные формулы и определения по физике. Рекомендуется всем изучающим и сдающим физику в школах, средних и высших учебных заведениях.
Шпаргалка
- формат jpg
- размер 149.22 КБ
- добавлен 14 января 2011 г.
Здесь представлены самые основные формулы, которые могут понадобиться студенту при сдачи экзамена по физике. Разделы: кинематика, динамика, электростатика, квантовая физика, ядерная физика и другие. Один этот самый лист.
software
- формат exe
- размер 91. 13 КБ
- добавлен 12 июля 2010 г.
 13 КБ
13 КБПрограмма, выводящая на экран формулы по физике. Бета-версия. Доступна только кинематика. NNSoft, 2006 г. Разработки для Pocket PC. Разделы: Кинематика; Динамика, Законы Сохранения; Статика, гидростатика; Мех. Колебания. Волны.; МКТ; термодинамика.rn
- формат pdf
- размер 1.95 МБ
- добавлен 06 октября 2011 г.
На 10 страницах приведены всё основные формулы по физике. Может пригодиться студенту при подготовке к экзамену, контрольной работе или просто для освежения памяти по следующим разделам: Кинематика. Динамика. Законы сохранения. Работа и мощность. Статика и гидростатика. Тепловые явления. Электростатика. Постоянный ток. Магнитные явления. Колебания и волны. Оптика.
Шпаргалка
- формат doc
- размер 128.54 КБ
- добавлен 30 октября 2011 г.
Выписки на 9 листах из книги “Краткий справочник по физике” Гридасов А.Ю. Новосибирск 1997 г. Файл содержит формулы из курса физики, которые будут полезны учащимся старших классов школ и младших курсов вузов. Все формулы изложены в компактном виде с небольшими комментариями. Файл также содержит полезные константы и прочую информацию.
Шпаргалка
- формат doc
- размер 136.87 КБ
- добавлен 24 января 2009 г.
Формулы по курсу физики: Механике, молекулярной физике и термодинамике, электричеству и магнетизму, колебаниям и волнам, оптике, квантовой природе излучения, элементам квантовой физики атомов, молекул и твёрдых тел, элементам физики атомного ядра и элементарных частиц.
- формат jpg
- размер 1.15 МБ
- добавлен 27 мая 2009 г.
Формулы – Шпоры по физике сделаны специально для мобильного телефона или графического калькулятора. (калькулятор должен иметь флешь память и читать jpg формат) Есть формулы по: Кинематике. Динамике. Законах сохранения энергии. Механика жидкостей. Основах МКТ. Термодинамике. Колебаниях и волнах. Электростатике. Постоянном электрическом токе. Индукции. Электромагнитным колебаниям. Оптике. Ядерным реакциям. Квантовой физике. Основам СТО.rn
- формат docx
- размер 97.99 КБ
- добавлен 07 декабря 2009 г.
Все школьные формулы по механике, молекулярной физике, термодинамике, электродинамике, оптике, квантовой физике и т. д.
д.
Шпаргалка
- формат doc
- размер 2.24 МБ
- добавлен 22 февраля 2011 г.
Полный сборник по физике, включающий в себя основные формулы, законы и определения. Данный сборник(глоссарий предназначен для студентов технического факультета). Рассмотрены следующие темы: Механика. Динамика. Молекулярный физика и термодинамика. Электричество и магнетизм. Оптика.
- формат jpg, htm
- размер 17.33 МБ
- добавлен 22 октября 2009 г.
Шпоры по Физике. Буквы, используемые для обозначения величин Методика решения задач по физике Векторы Основные положения, законы и формулы Механика Кинематика Динамика Статика Простые механизмы Жидкости и газы Молекулярная физика Термодинамика Электростатика Электричество Магнитное поле Колебания и волны Оптика Элементы теории относительности Квантовая физика Атомная и ядерная физика Приложения Шкала электромагнитных волн. ..
..
Кинематика формулы по физике 9. Основные понятия кинематики и формулы. Теоретическая база для решения задач
Сессия приближается, и пора нам переходить от теории к практике. На выходных мы сели и подумали о том, что многим студентам было бы неплохо иметь под рукой подборку основных физических формул. Сухие формулы с объяснением: кратко, лаконично, ничего лишнего. Очень полезная штука при решении задач, знаете ли. Да и на экзамене, когда из головы может «выскочить» именно то, что накануне было жесточайше вызубрено, такая подборка сослужит отличную службу.
Больше всего задач обычно задают по трем самым популярным разделам физики. Это механика , термодинамика и молекулярная физика , электричество . Их и возьмем!
Основные формулы по физике динамика, кинематика, статика
Начнем с самого простого. Старое-доброе любимое прямолинейное и равномерное движение.
Формулы кинематики:
Конечно, не будем забывать про движение по кругу, и затем перейдем к динамике и законам Ньютона.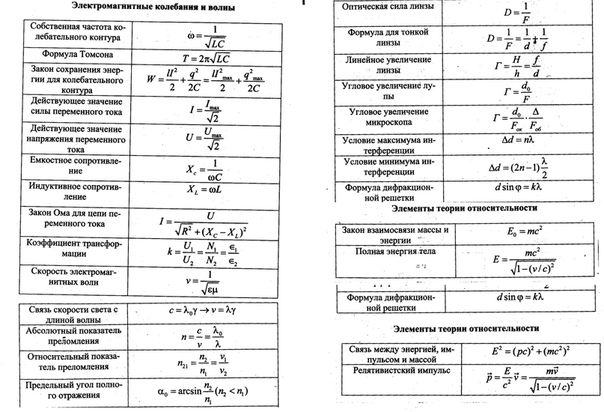
После динамики самое время рассмотреть условия равновесия тел и жидкостей, т.е. статику и гидростатику
Теперь приведем основные формулы по теме «Работа и энергия». Куда же нам без них!
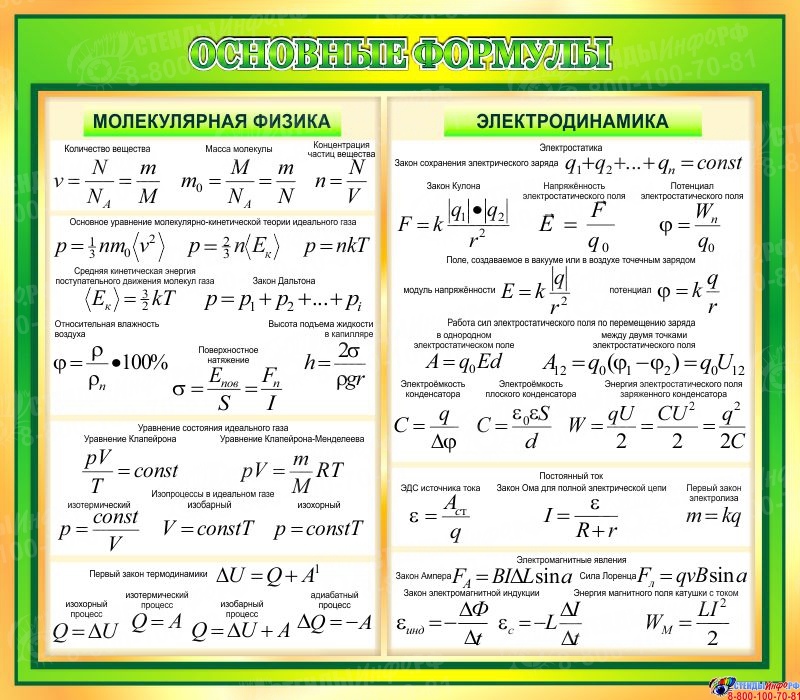
Основные формулы молекулярной физики и термодинамики
Закончим раздел механики формулами по колебаниям и волнам и перейдем к молекулярной физике и термодинамике.
Коэффициент полезного действия, закон Гей-Люссака, уравнение Клапейрона-Менделеева – все эти милые сердцу формулы собраны ниже.
Кстати! Для всех наших читателей сейчас действует скидка 10% на .
Основные формулы по физике: электричество
Пора переходить к электричеству, хоть его и любят меньше термодинамики. Начинаем с электростатики.
И, под барабанную дробь, заканчиваем формулами для закона Ома, электромагнитной индукции и электромагнитных колебаний.
На этом все. Конечно, можно было бы привести еще целую гору формул, но это ни к чему. Когда формул становится слишком много, можно легко запутаться, а там и вовсе расплавить мозг. Надеемся, наша шпаргалка основных формул по физике поможет решать любимые задачи быстрее и эффективнее. А если хотите уточнить что-то или не нашли нужной формулы: спросите у экспертов студенческого сервиса . Наши авторы держат в голове сотни формул и щелкают задачи, как орешки. Обращайтесь, и вскоре любая задача будет вам «по зубам».
Надеемся, наша шпаргалка основных формул по физике поможет решать любимые задачи быстрее и эффективнее. А если хотите уточнить что-то или не нашли нужной формулы: спросите у экспертов студенческого сервиса . Наши авторы держат в голове сотни формул и щелкают задачи, как орешки. Обращайтесь, и вскоре любая задача будет вам «по зубам».
Основные единицы измерения величин в системе СИ таковы:
- единица измерения длины – метр (1 м),
- времени – секунда (1 с),
- массы – килограмм (1 кг),
- количества вещества – моль (1 моль),
- температуры – кельвин (1 К),
- силы электрического тока – ампер (1 А),
- Справочно: силы света – кандела (1 кд, фактически не используется при решении школьных задач).
При выполнении расчетов в системе СИ углы измеряются в радианах.
Если в задаче по физике не указано, в каких единицах нужно дать ответ, его нужно дать в единицах системы СИ или в производных от них величинах, соответствующих той физической величине, о которой спрашивается в задаче. Например, если в задаче требуется найти скорость, и не сказано в чем ее нужно выразить, то ответ нужно дать в м/с.
Например, если в задаче требуется найти скорость, и не сказано в чем ее нужно выразить, то ответ нужно дать в м/с.
Для удобства в задачах по физике часто приходится использовать дольные (уменьшающие) и кратные (увеличивающие) приставки. их можно применять к любой физической величине. Например, мм – миллиметр, кт – килотонна, нс – наносекунда, Мг – мегаграмм, ммоль – миллимоль, мкА – микроампер. Запомните, что в физике не существует двойных приставок. Например, мкг – это микрограмм, а не милликилограмм. Учтите, что при сложении и вычитании величин Вы можете оперировать только величинами одинаковой размерности. Например, килограммы можно складывать только с килограммами, из миллиметров можно вычитать только миллиметры, и так далее. При переводе величин пользуйтесь следующей таблицей.
Путь и перемещение
Кинематикой называют раздел механики, в котором движение тел рассматривается без выяснения причин этого движения.
Механическим движением тела называют изменение его положения в пространстве относительно других тел с течением времени.
Всякое тело имеет определенные размеры. Однако, во многих задачах механики нет необходимости указывать положения отдельных частей тела. Если размеры тела малы по сравнению с расстояниями до других тел, то данное тело можно считать материальной точкой . Так при движении автомобиля на большие расстояния можно пренебречь его длиной, так как длина автомобиля мала по сравнению с расстояниями, которое он проходит.
Интуитивно понятно, что характеристики движения (скорость, траектория и т.д.) зависят от того, откуда мы на него смотрим. Поэтому для описания движения вводится понятие системы отсчета. Система отсчета (СО) – совокупность тела отсчета (оно считается абсолютно твердым), привязанной к нему системой координат, линейки (прибора, измеряющего расстояния), часов и синхронизатора времени.
Перемещаясь с течением времени из одной точки в другую, тело (материальная точка) описывает в данной СО некоторую линию, которую называют траекторией движения тела .
Перемещением тела называют направленный отрезок прямой, соединяющий начальное положение тела с его конечным положением. Перемещение есть векторная величина. Перемещение может в процессе движения увеличиваться, уменьшаться и становиться равным нулю.
Пройденный путь равен длине траектории, пройденной телом за некоторое время. Путь – скалярная величина. Путь не может уменьшаться. Путь только возрастает либо остается постоянным (если тело не движется). При движении тела по криволинейной траектории модуль (длина) вектора перемещения всегда меньше пройденного пути.
При равномерном (с постоянной скоростью) движении путь L может быть найден по формуле:
где: v – скорость тела, t – время в течении которого оно двигалось. При решении задач по кинематике перемещение обычно находится из геометрических соображений. Часто геометрические соображения для нахождения перемещения требуют знания теоремы Пифагора.
Средняя скорость
Скорость – векторная величина, характеризующая быстроту перемещения тела в пространстве. Скорость бывает средней и мгновенной. Мгновенная скорость описывает движение в данный конкретный момент времени в данной конкретной точке пространства, а средняя скорость характеризует все движение в целом, в общем, не описывая подробности движения на каждом конкретном участке.
Скорость бывает средней и мгновенной. Мгновенная скорость описывает движение в данный конкретный момент времени в данной конкретной точке пространства, а средняя скорость характеризует все движение в целом, в общем, не описывая подробности движения на каждом конкретном участке.
Средняя скорость пути – это отношение всего пути ко всему времени движения:
где: L полн – весь путь, который прошло тело, t полн – все время движения.
Средняя скорость перемещения – это отношение всего перемещения ко всему времени движения:
Эта величина направлена так же, как и полное перемещение тела (то есть из начальной точки движения в конечную точку). При этом не забывайте, что полное перемещение не всегда равно алгебраической сумме перемещений на определённых этапах движения. Вектор полного перемещения равен векторной сумме перемещений на отдельных этапах движения.
- При решении задач по кинематике не совершайте очень распространенную ошибку. Средняя скорость, как правило, не равна среднему арифметическому скоростей тела на каждом этапе движения. Среднее арифметическое получается только в некоторых частных случаях.
- И уж тем более средняя скорость не равна одной из скоростей, с которыми двигалось тело в процессе движения, даже если эта скорость имела примерно промежуточное значение относительно других скоростей, с которыми двигалось тело.
 Средняя скорость, как правило, не равна среднему арифметическому скоростей тела на каждом этапе движения. Среднее арифметическое получается только в некоторых частных случаях.
Средняя скорость, как правило, не равна среднему арифметическому скоростей тела на каждом этапе движения. Среднее арифметическое получается только в некоторых частных случаях.Равноускоренное прямолинейное движение
Ускорение – векторная физическая величина, определяющая быстроту изменения скорости тела. Ускорением тела называют отношение изменения скорости к промежутку времени, в течение которого происходило изменение скорости:
где: v 0 – начальная скорость тела, v – конечная скорость тела (то есть спустя промежуток времени t ).
Далее, если иное не указано в условии задачи, мы считаем, что если тело движется с ускорением, то это ускорение остается постоянным. Такое движение тела называется равноускоренным (или равнопеременным). При равноускоренном движении скорость тела изменяется на одинаковую величину за любые равные промежутки времени.
При равноускоренном движении скорость тела изменяется на одинаковую величину за любые равные промежутки времени.
Равноускоренное движение бывает собственно ускоренным, когда тело увеличивает скорость движения, и замедленным, когда скорость уменьшается. Для простоты решения задач удобно для замедленного движения брать ускорение со знаком «–».
Из предыдущей формулы, следует другая более распространённая формула, описывающая изменение скорости со временем при равноускоренном движении:
Перемещение (но не путь) при равноускоренном движении рассчитывается по формулам:
В последней формуле использована одна особенность равноускоренного движения. При равноускоренном движении среднюю скорость можно рассчитывать, как среднее арифметическое начальной и конечной скоростей (этим свойством очень удобно пользоваться при решении некоторых задач):
С расчетом пути все сложнее. Если тело не меняло направления движения, то при равноускоренном прямолинейном движении путь численно равен перемещению. А если меняло – надо отдельно считать путь до остановки (момента разворота) и путь после остановки (момента разворота). А просто подстановка времени в формулы для перемещения в этом случае приведет к типичной ошибке.
А если меняло – надо отдельно считать путь до остановки (момента разворота) и путь после остановки (момента разворота). А просто подстановка времени в формулы для перемещения в этом случае приведет к типичной ошибке.
Координата при равноускоренном движении изменяется по закону:
Проекция скорости при равноускоренном движении изменяется по такому закону:
Аналогичные формулы получаются для остальных координатных осей.
Свободное падение по вертикали
На все тела, находящиеся в поле тяготения Земли, действует сила тяжести. В отсутствие опоры или подвеса эта сила заставляет тела падать к поверхности Земли. Если пренебречь сопротивлением воздуха, то движение тел только под действием силы тяжести называется свободным падением. Сила тяжести сообщает любым телам, независимо от их формы, массы и размеров, одинаковое ускорение, называемое ускорением свободного падения. Вблизи поверхности Земли ускорение свободного падения составляет:
Это значит, что свободное падение всех тел вблизи поверхности Земли является равноускоренным (но не обязательно прямолинейным) движением. Вначале рассмотрим простейший случай свободного падения, когда тело движется строго по вертикали. Такое движение является равноускоренным прямолинейным движением, поэтому все изученные ранее закономерности и фокусы такого движения подходят и для свободного падения. Только ускорение всегда равно ускорению свободного падения.
Вначале рассмотрим простейший случай свободного падения, когда тело движется строго по вертикали. Такое движение является равноускоренным прямолинейным движением, поэтому все изученные ранее закономерности и фокусы такого движения подходят и для свободного падения. Только ускорение всегда равно ускорению свободного падения.
Традиционно при свободном падении используют направленную вертикально ось OY. Ничего страшного здесь нет. Просто надо во всех формулах вместо индекса «х » писать «у ». Смысл этого индекса и правило определения знаков сохраняется. Куда направлять ось OY – Ваш выбор, зависящий от удобства решения задачи. Вариантов 2: вверх или вниз.
Приведем несколько формул, которые являются решением некоторых конкретных задач по кинематике на свободное падение по вертикали. Например, скорость, с которой упадет тело падающее с высоты h без начальной скорости:
Время падения тела с высоты h без начальной скорости:
Максимальная высота на которую поднимется тело, брошенное вертикально вверх с начальной скоростью v 0 , время подъема этого тела на максимальную высоту, и полное время полета (до возвращения в исходную точку):
Горизонтальный бросок
При горизонтальном броске с начальной скоростью v 0 движение тела удобно рассматривать как два движения: равномерное вдоль оси ОХ (вдоль оси ОХ нет никаких сил препятствующих или помогающих движению) и равноускоренного движения вдоль оси OY.
Скорость в любой момент времени направлена по касательной к траектории. Ее можно разложить на две составляющие: горизонтальную и вертикальную. Горизонтальная составляющая всегда остается неизменной и равна v x = v 0 . А вертикальная возрастает по законам ускоренного движения v y = gt . При этом полная скорость тела может быть найдена по формулам:
При этом важно понять, что время падения тела на землю никоим образом не зависит от того, с какой горизонтальной скоростью его бросили, а определяется только высотой, с которой было брошено тело. Время падения тела на землю находится по формуле:
Пока тело падает, оно одновременно движется вдоль горизонтальной оси. Следовательно, дальность полета тела или расстояние, которое тело сможет пролететь вдоль оси ОХ, будет равно:
Угол между горизонтом и скоростью тела легко найти из соотношения:
Также иногда в задачах могут спросить о моменте времени, при котором полная скорость тела будет наклонена под определенным углом к вертикали . Тогда этот угол будет находиться из соотношения:
Тогда этот угол будет находиться из соотношения:
Важно понять, какой именно угол фигурирует в задаче (с вертикалью или с горизонталью). Это и поможет вам выбрать правильную формулу. Если же решать эту задачу координатным методом, то общая формула для закона изменения координаты при равноускоренном движении:
Преобразуется в следующий закон движения по оси OY для тела брошенного горизонтально:
При ее помощи мы можем найти высоту на которой будет находится тело в любой момент времени. При этом в момент падения тела на землю координата тела по оси OY будет равна нулю. Очевидно, что вдоль оси OХ тело движется равномерно, поэтому в рамках координатного метода горизонтальная координата изменятся по закону:
Бросок под углом к горизонту (с земли на землю)
Максимальная высота подъема при броске под углом к горизонту (относительно начального уровня):
Время подъема до максимальной высоты при броске под углом к горизонту:
Дальность полета и полное время полета тела брошенного под углом к горизонту (при условии, что полет заканчивается на той же высоте с которой начался, т. е. тело бросали, например, с земли на землю):
е. тело бросали, например, с земли на землю):
Минимальная скорость тела брошенного под углом к горизонту – в наивысшей точке подъёма, и равна:
Максимальная скорость тела брошенного под углом к горизонту – в моменты броска и падения на землю, и равна начальной. Это утверждение верно только для броска с земли на землю. Если тело продолжает лететь ниже того уровня, с которого его бросали, то оно будет там приобретать все большую и большую скорость.
Сложение скоростей
Движение тел можно описывать в различных системах отсчета. С точки зрения кинематики все системы отсчета равноправны. Однако кинематические характеристики движения, такие как траектория, перемещение, скорость, в разных системах оказываются различными. Величины, зависящие от выбора системы отсчета, в которой производится их измерение, называют относительными. Таким образом, покой и движение тела относительны.
Таким образом, абсолютная скорость тела равна векторной сумме его скорости относительно подвижной системы координат и скорости самой подвижной системы отсчета. Или, другими словами, скорость тела в неподвижной системе отсчета равна векторной сумме скорости тела в подвижной системе отсчета и скорости подвижной системы отсчета относительно неподвижной.
Или, другими словами, скорость тела в неподвижной системе отсчета равна векторной сумме скорости тела в подвижной системе отсчета и скорости подвижной системы отсчета относительно неподвижной.
Равномерное движение по окружности
Движение тела по окружности является частным случаем криволинейного движения. Такой вид движения также рассматривается в кинематике. При криволинейном движении вектор скорости тела всегда направлен по касательной к траектории. То же самое происходит и при движении по окружности (см. рисунок). Равномерное движение тела по окружности характеризуется рядом величин.
Период – время, за которое тело, двигаясь по окружности, совершает один полный оборот. Единица измерения – 1 с. Период рассчитывается по формуле:
Частота – количество оборотов, которое совершило тело, двигаясь по окружности, в единицу времени. Единица измерения – 1 об/с или 1 Гц. Частота рассчитывается по формуле:
В обеих формулах: N – количество оборотов за время t . Как видно из вышеприведенных формул, период и частота величины взаимообратные:
Как видно из вышеприведенных формул, период и частота величины взаимообратные:
При равномерном вращении скорость тела будет определяется следующим образом:
где: l – длина окружности или путь, пройденный телом за время равное периоду T . При движении тела по окружности удобно рассматривать угловое перемещение φ (или угол поворота), измеряемое в радианах. Угловой скоростью ω тела в данной точке называют отношение малого углового перемещения Δφ к малому промежутку времени Δt . Очевидно, что за время равное периоду T тело пройдет угол равный 2π , следовательно при равномерном движении по окружности выполняются формулы:
Угловая скорость измеряется в рад/с. Не забывайте переводить углы из градусов в радианы. Длина дуги l связана с углом поворота соотношением:
Связь между модулем линейной скорости v и угловой скоростью ω :
При движении тела по окружности с постоянной по модулю скоростью изменяется только направление вектора скорости, поэтому движение тела по окружности с постоянной по модулю скоростью является движением с ускорением (но не равноускоренным), так как меняется направление скорости. В этом случае ускорение направлено по радиусу к центру окружности. Его называют нормальным, или центростремительным ускорением , так как вектор ускорения в любой точке окружности направлен к ее центру (см. рисунок).
В этом случае ускорение направлено по радиусу к центру окружности. Его называют нормальным, или центростремительным ускорением , так как вектор ускорения в любой точке окружности направлен к ее центру (см. рисунок).
Модуль центростремительного ускорения связан с линейной v
на этом сайте. Для этого нужно всего ничего, а именно: посвящать подготовке к ЦТ по физике и математике, изучению теории и решению задач по три-четыре часа каждый день. Дело в том, что ЦТ это экзамен, где мало просто знать физику или математику, нужно еще уметь быстро и без сбоев решать большое количество задач по разным темам и различной сложности. Последнему научиться можно только решив тысячи задач. После этого Вам останется подумать только над самыми сложными задачами.
После этого Вам останется подумать только над самыми сложными задачами.
Успешное, старательное и ответственное выполнение этих трех пунктов, а также ответственная проработка итоговых тренировочных тестов , позволит Вам показать на ЦТ отличный результат, максимальный из того, на что Вы способны.
Нашли ошибку?
Если Вы, как Вам кажется, нашли ошибку в учебных материалах, то напишите, пожалуйста, о ней на электронную почту (). В письме укажите предмет (физика или математика), название либо номер темы или теста, номер задачи, или место в тексте (страницу) где по Вашему мнению есть ошибка. Также опишите в чем заключается предположительная ошибка. Ваше письмо не останется незамеченным, ошибка либо будет исправлена, либо Вам разъяснят почему это не ошибка.
В письме укажите предмет (физика или математика), название либо номер темы или теста, номер задачи, или место в тексте (страницу) где по Вашему мнению есть ошибка. Также опишите в чем заключается предположительная ошибка. Ваше письмо не останется незамеченным, ошибка либо будет исправлена, либо Вам разъяснят почему это не ошибка.
Для того чтобы понять, что изучает механика, необходимо рассмотреть, что означает движение в самом общем смысле. Значение этого слова подразумевает под собой изменение чего-либо. Например, политическое движение выступает за равноправие разных слоев населения вне зависимости от их расовой принадлежности. Раньше его не было, затем что-то изменилось и теперь каждый человек имеет равные права. Это движение цивилизации вперед. Еще пример – экологическое. В прошлом, выбравшись на природу, никто не задумывался о том, что оставляет после себя мусор. Сегодня же любой цивилизованный человек соберет его за собой и отвезет в специально отведенное место для дальнейшей утилизации.
Что-то подобное можно наблюдать и в механике. При механическом движении изменяется положение тела в пространстве относительно других предметов с течением времени. Основная задача механики – указать, где находится объект в любой момент, учитывая даже тот, который еще не наступил. То есть, предсказать положение тела в заданное время, а не только узнать, где именно в пространстве оно находилось в прошлом.
Кинематика – это раздел механики, который изучает движение тела, не анализируя его причины. Это значит, что она учит не объяснять, а описывать. То есть, придумать способ, с помощью которого можно было бы задать положение тела в любой момент времени. Основные понятия кинематики включают в себя скорость, ускорение, расстояние, время и перемещение.
Сложность в описании движения
Первая проблема, с которой сталкивается кинематика – это то, что у каждого тела есть определенный размер. Допустим, необходимо описать движение какого-нибудь предмета. Это значит научиться обозначать его положение в любой момент времени. Но каждый предмет занимает в пространстве какое-то место. То есть, что все части этого объекта в один и тот же момент времени занимают разное положение.
Но каждый предмет занимает в пространстве какое-то место. То есть, что все части этого объекта в один и тот же момент времени занимают разное положение.
Какую точку в таком случае необходимо взять для описания нахождения всего предмета? Если учитывать каждую, то расчеты окажутся слишком сложными. Поэтому решение ответа на этот вопрос можно максимально упростить. Если все точки одного тела движутся в одинаковом направлении, то для описания движения достаточно одной такой, которую содержит это тело.
Виды движения в кинематике
Существует три типа:
- Поступательным называется движение, при котором любая прямая проведенная в теле остается параллельной самой себе. Например, автомобиль, который движется по шоссе, совершает такой вид движения.
- Вращательным называется такое движение тела при котором все его точки движутся по окружностям с центрами, лежащими на одной прямой, называемой осью вращения. Например, вращение Земли относительно своей оси.
- Колебательным называется движение, при котором тело повторяет свою траекторию через определенный отрезок времени. Например, движение маятника.
 Например, движение маятника.
Например, движение маятника.Основные понятия кинематики – материальная точка
Любое сложное движение можно описать как комбинацию двух простейших видов – поступательного и вращательного. Например колесо автомобиля или юла, стоящая на движущейся прямо платформе, участвуют одновременно в этих двух типах перемещения.
Но что делать, если движение тела нельзя представить в виде комбинации? Например, если автомобиль едет по ухабистой дороге, его положение будет меняться очень сложным образом. Если рассчитывать только то, что этот транспорт перемещается из одного города в другой, то в такой ситуации становится не важно какого размера тело движется из точки А в точку Б и им можно пренебречь. В данном случае важно только за какое время автомобиль прошел определенное расстояние и с какой скоростью двигался.
Однако следует учитывать, что пренебрежение размером допускается не в каждой задаче. Например, если рассчитывать движение при парковке автомобиля, то игнорирование величины данного тела, приведет к пагубным последствием. Поэтому, только в тех ситуациях, когда в рамках конкретной задачи, размерами движущегося объекта можно пренебречь, то такое тело принято называть материальной точкой.
Поэтому, только в тех ситуациях, когда в рамках конкретной задачи, размерами движущегося объекта можно пренебречь, то такое тело принято называть материальной точкой.
Формулы кинематики
Числа, с помощью которых задается положение точки в пространстве, называются координатами. Чтобы определить его на прямой, достаточно одного числа, когда речь идет о поверхности, то двух, о пространстве – трех. Большего количества чисел в трехмерном мире (для описывания положения материальной точки) не требуется.
Существует три основных уравнения для понятия кинематики, как раздела о движении тел:
- v = u + at.
- S = ut + 1/2at 2 .
- v 2 = u 2 + 2as.
v = конечная скорость,
u = Начальная скорость,
a = ускорение,
s = расстояние, пройденное телом,
Формулы кинематики в одномерном пространстве:
X – X o = V o t + 1/2a t2
V 2 = V o 1 + 2a (X – X o)
X – X o = 1\2 (V o + V) t
Где,
V – конечная скорость (м / с),
V o – начальная скорость (м / с),
a – ускорение (м / с 2),
t – время (с),
X – конечное положение (м),
Формулы кинематики в двумерном пространстве
Поскольку следующие уравнения используются для описания материальной точки на плоскости, стоит рассматривать ось X и Y.
Учитывая направление Х:
a x = constant
V fx = V i x + a x Δt
X f = X i + V i x Δt +1/2a x Δt 2
Δt = V fx -V ix /a x
V fx 2 = V ix 2 + 2ax Δx
X f = X i + 1/2 (V fx + V ix) Δ t .
И учитывая направление y:
a y = constant
V fy = V iy + a y Δt
y f = y i + V iy Δt + 1/2 a x Δt 2
Δt = V fy – V iy /a y
V fy 2 = V iy 2 + 2 ay Δ y
y f = y i +1/2 (V fy + V iy) Δt.
V f – конечная скорость (м / с),
V i – начальная скорость (м / с),
a – ускорение (m / с 2),
t – время (с),
X – конечное положение (м),
X 0 – начальное положение (м).
Перемещение брошенного снаряда – лучший пример для описания движения объекта в двух измерениях. Здесь тело перемещается, как в вертикальном положении У, так и в горизонтальном положении Х, поэтому можно сказать, что предмет имеет две скорости.
Примеры задач по кинематике
Задача 1 : Начальная скорость грузовика равна нулю. Изначально этот объект находится в состоянии покоя. На него начинает действовать равномерное ускорение в течение временного интервала 5,21 секунды. Расстояние, пройденное грузовиком, составляет 110 м. Найти ускорение.
Изначально этот объект находится в состоянии покоя. На него начинает действовать равномерное ускорение в течение временного интервала 5,21 секунды. Расстояние, пройденное грузовиком, составляет 110 м. Найти ускорение.
Решение:
Пройденное расстояние s = 110 м,
начальная скорость v i = 0,
время t = 5,21 с,
ускорение a =?
Используя основные понятие и формулы кинематики, можно заключить, что,
s = v i t + 1/2 a t 2 ,
110 м = (0) × (5.21) + 1/2 × a (5.21) 2 ,
a = 8,10 м / с 2 .
Задача 2: Точка движется вдоль оси х (в см), после t секунд путешествия, ее можно представить, используя уравнение x = 14t 2 – t + 10. Необходимо найти среднюю скорость точки, при условии, что t = 3s?
Решение:
Положение точки при t = 0, равно x = 10 см.
При t = 3s, x = 133 см.
Средняя скорость, V av = Δx/Δt = 133-10/3-0 = 41 см / с.
Что такое тело отсчета
О движении можно говорить только если существует что-то, относительно чего рассматривается изменение положения изучаемого объекта. Такой предмет называется телом отсчета и оно условно всегда принимается за неподвижное.
Такой предмет называется телом отсчета и оно условно всегда принимается за неподвижное.
Если в задаче не указано в какой системе отчета движется материальная точка, то телом отсчета считается земля по умолчанию. Однако, это не означает, что за неподвижный в заданный момент времени объект, относительно которого совершается движение, нельзя принять любой другой удобный для расчета. Например, за тело отсчета можно взять движущийся поезд, поворачивающий автомобиль и так далее.
Система отсчета и ее значение в кинематике
Для описания движения необходимы три составляющие:
- Система координат.
- Тело отсчета.
- Прибор для измерения времени.
Тело отсчета, система координат, связанная с ним и прибор для измерения времени образуют систему отсчета. Бессмысленно говорить о движении, если ее не указывать. Правильно подобранная система отсчета, позволяет упростить описание перемещения и, наоборот, усложнить, если она выбрана неудачно.
Именно по этой причине, человечество долго считало, что Солнце движется вокруг Земли и что она находится в центре вселенной. Такое сложное движение светил, связанное с тем, что земные наблюдатели находятся в системе отсчета, которая очень замысловато движется. Земля вращается вокруг свое оси и одновременно вокруг Солнца. На самом деле, если сменить систему отсчета, то все движения небесных тел легко описываются. Это в свое время было сделано Коперником. Он предложил собственное описание мироустройства, в котором Солнце неподвижно. Относительно него описать движение планет гораздо проще, чем если телом отсчета будет являться Земля.
Такое сложное движение светил, связанное с тем, что земные наблюдатели находятся в системе отсчета, которая очень замысловато движется. Земля вращается вокруг свое оси и одновременно вокруг Солнца. На самом деле, если сменить систему отсчета, то все движения небесных тел легко описываются. Это в свое время было сделано Коперником. Он предложил собственное описание мироустройства, в котором Солнце неподвижно. Относительно него описать движение планет гораздо проще, чем если телом отсчета будет являться Земля.
Основные понятия кинематики – путь и траектория
Пусть некоторая точка первое время находилась в положении А, спустя некоторое время она оказалась в положении В. Между ними можно провести одну линию. Но для того, чтобы эта прямая несла больше информации о движении, то есть было понятно откуда и куда двигалось тело, это должен быть не просто отрезок, а направленный, обычно обозначающийся буквой S. Перемещением тела, называется вектор, проведенный из начального положения предмета в конечное.
Если тело изначально находилось в точке А, а затем оказалось в точке В, это не означает, что оно двигалось только по прямой. Из одного положения в другое можно попасть бесконечным количеством способов. Линия, вдоль которой движется тело, является еще одним основным понятием кинематики – траекторией. А ее длина называется путь, который обычно обозначается буквами L или l.
Определение 1
Кинематика − это раздел механики, который рассматривает движение тел без объяснения вызывающих его причин.
Определение 2
Механическое движение тела − это изменение положения данного тела в пространстве относительно других тел во времени.
Как мы сказали, механическое движение тела относительно. Движение одного и того же тела относительно разных тел может быть разным.
Определение 3
Для характеристики движения тела указывается, по отношению к какому из тел рассматривается это движение. Это будет тело отсчета .
Определение 4
Система отсчета − система координат, которая связана с телом отсчета и временем для отсчета. Она позволяет определить положение передвигающегося тела в любой отрезок времени.
Она позволяет определить положение передвигающегося тела в любой отрезок времени.
В С И единицей длины выступает метр, а единицей времени – секунда.
У каждого тела есть определенные размеры. Разные части тела расположены в разных пространственных местах. Но в большинстве задач механики не нужно указывать положение отдельных частей тела. Если размеры тела маленькие в сравнении с расстояниями до остальных тел, тогда заданное тело считается его материальной точкой. Таким образом поступают при изучении перемещения планет вокруг Солнца.
Определение 5
Механическое движение называют поступательным , в случае если все части тела перемещаются одинаково.
Пример 1
Поступательное движение наблюдается у кабин в аттракционе «Колесо обозрения» или у автомобиля на прямолинейном участке пути.
При поступательном движении тела его также рассматривают в качестве материальной точки.
Определение 6
Материальная точка − это тело, размерами которого при заданных условиях можно пренебречь.
Термин “материальная точка” имеет важное значение в механике.
Определение 7
Траектория движения тела − некоторая линия, которую тело или материальная точка описывает, перемещаясь во времени от одной точки до другой.
Местонахождение материальной точки в пространстве в любой временной отрезок (закон движения) определяют, используя зависимость координат от времени x = x (t) , y = y (t) , z = z (t) или зависимость от времени радиус-вектора r → = r → (t) , проведенного от начала координат до заданной точки. Наглядно это представлено на рисунке 1 . 1 . 1 .
Рисунок 1 . 1 . 1 . Определение положения точки при помощи координат x = x (t) , y = y (t) и z = z (t) и радиус-вектора r → (t) , r 0 → – радиус-вектор положения точки в начальный момент времени.
Определение 8
Перемещение тела s → = ∆ r → = r → – r 0 → – это направленный отрезок прямой, который соединяет начальное положение тела с его дальнейшим положением. Перемещение является векторной величиной.
Перемещение является векторной величиной.
Пройденный путь l равняется длине дуги траектории, преодоленной телом за определенное время t . Путь является скалярной величиной.
Если движение тела рассматривается в течение довольно короткого отрезка времени, тогда вектор перемещения оказывается направленным по касательной к траектории в заданной точке, а его длина равняется преодоленному пути.
В случае небольшого промежутка времени Δ t преодоленный телом путь Δ l практически совпадает с модулем вектора перемещения ∆ s → . При перемещении тела по криволинейной траектории модуль вектора движения все время меньше пройденного пути (рисунок 1 . 1 . 2).
Рисунок 1 . 1 . 2 . Пройденный путь l и вектор перемещения ∆ s → при криволинейном движении тела.
a и b – это начальная и конечная точки пути.
Для описания движения в физике введено понятие средней скорости: υ → = ∆ s → ∆ t = ∆ r → ∆ t .
Физиков больше интересует формула не средней, а мгновенной скорости, которая рассчитывается как предел, к которому стремится средняя скорость на бесконечно маленьком промежутке времени Δ t , то есть υ → = ∆ s → ∆ t = ∆ r → ∆ t ; ∆ t → 0 .
В математике данный предел называется производная и обозначается d r → d t или r → ˙ .
Мгновенная скорость υ → тела в каждой точке криволинейной траектории направлена по касательной к траектории в заданной точке. Отличие между средней и мгновенной скоростями демонстрирует рисунок 1 . 1 . 3 .
Рисунок 1 . 1 . 3 . Средняя и мгновенная скорости. ∆ s 1 → , ∆ s 2 → , ∆ s 3 → – перемещения за время ∆ t 1 соответственно. При t → 0 , υ → с р → υ → .
При перемещении тела по криволинейной траектории скорость υ → меняется по модулю и по направлению. Изменение вектора скорости υ → за какой-то маленький промежуток времени Δ t задается при помощи вектора ∆ υ → (рисунок 1 . 1 . 4).
Вектор изменения скорости ∆ υ → = υ 2 → – υ 1 → за короткий промежуток времени Δ t раскладывается на 2 составляющие: ∆ υ r → , которая направлена вдоль вектора υ → (касательная составляющая) и ∆ υ n → , которая направлена перпендикулярно вектору υ → (нормальная составляющая).
Рисунок 1 . 1 . 4 . Изменение вектора скорости по величине и по направлению. ∆ υ → = ∆ υ → r + ∆ υ → n – изменение вектора скорости за промежуток времени Δ t .
Определение 9
Мгновенное ускорение тела a → – это предел отношения небольшого изменения скорости ∆ υ → к короткому отрезку времени Δ t , в течение которого изменялась скорость: a → = ∆ υ → ∆ t = ∆ υ → τ ∆ t + ∆ υ → n ∆ t ; (∆ t → 0) .
Направление вектора ускорения a → , при криволинейном движении, не совпадает с направлением вектора скорости υ → . Составляющие вектора ускорения a → – это касательные (тангенциальные) a → τ и нормальные a → n ускорения (рисунок 1 . 1 . 5).
Рисунок 1 . 1 . 5 . Касательное и нормальное ускорения.
Касательное ускорение показывает, как быстро меняется скорость тела по модулю: a τ = ∆ υ ∆ t ; ∆ t → 0 .
Вектор a → τ направлен по касательной к траектории.
Нормальное ускорение показывает, как быстро скорость тела меняется по направлению.
Пример 2
Представим криволинейное движение, как движение по дугам окружностей (рисунок 1 . 1 . 6).
Рисунок 1 . 1 . 6 . Движение по дугам окружностей.
Нормальное ускорение находится в зависимости от модуля скорости υ и радиуса R окружности, по дуге которой тело перемещается в определенный момент времени: a n = υ 2 R .
Вектор a n → все время направлен к центру окружности.
По рисунку 1 . 1 . 5 видно, модуль полного ускорения равен a = a τ 2 + a n 2 .
Итак, основные физические величины в кинематике материальной точки – это пройденный путь l , перемещение s → , скорость υ → и ускорение a → .
Путь l – скалярная величина.
Перемещение s → , скорость υ → и ускорение a → – векторные величины.
Для того чтобы задать какую-нибудь векторную величину, необходимо задать ее модуль и определить направление. Вектора подчиняются математическим правилам: их можно проектировать на координатные оси, складывать, вычитать и др.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Прежде всего, следует заметить, что речь будет идти о геометрической точке, то есть области пространства, не имеющей размеров. Именно для этого абстрактного образа (модели) и справедливы все представленные ниже определения и формулы. Однако для краткости я в дальнейшем буду часто говорить о движении тела , объекта или частицы . Это я делаю только для того, чтобы Вам легче было читать. Но всегда помните, что речь идет о геометрической точке.
Именно для этого абстрактного образа (модели) и справедливы все представленные ниже определения и формулы. Однако для краткости я в дальнейшем буду часто говорить о движении тела , объекта или частицы . Это я делаю только для того, чтобы Вам легче было читать. Но всегда помните, что речь идет о геометрической точке.
Радиус-вектор точки – это вектор, начало которого совпадает с началом системы координат, а конец – с данной точкой. Радиус-вектор обозначается, как правило, буквой r . К сожалению некоторые авторы обозначают его буквой s . Настоятельно советую не использовать обозначение s для радиус-вектора. Дело в том, что подавляющее большинство авторов (как отечественных, так и зарубежных) используют букву s для обозначения пути, который является скаляром и к радиус-вектору, как правило, отношения не имеет. Если вы будете обозначать радиус-вектор как s , то легко можете запутаться. Еще раз, мы, как и все нормальные люди, будем использовать следующие обозначения: r – радиус-вектор точки, s – путь, пройденный точкой.
Вектор перемещения (часто говорят просто – перемещение ) – это вектор , начало которого совпадает с той точкой траектории, где было тело, когда мы начали изучать данное движение, а конец этого вектора совпадает с той точкой траектории, где мы это изучение закончили. Будем обозначать этот вектор как Δr . Использование символа Δ очевидно: Δr – это разность между радиус-вектором r конечной точки изучаемого отрезка траектории и радиус-вектором r 0 точки начала этого отрезка (рис. 1), то есть Δr = r − r 0 .
Траектория – это линия, вдоль которой движется тело.
Путь – это сумма длин всех участков траектории, последовательно проходимых телом при движения. Обозначается либо ΔS, если речь идет об участке траектории, либо S, если речь идет о всей траектории наблюдаемого движения. Иногда (редко) путь обозначают и другой буквой, например, L (только не обозначайте его как r, мы уже об этом говорили). Запомните! Путь – это положительный скаляр ! Путь в процессе движения может только увеличиваться .
Запомните! Путь – это положительный скаляр ! Путь в процессе движения может только увеличиваться .
Средняя скорость перемещения v ср
v ср = Δr /Δt.
Мгновенная скорость перемещения v – это вектор, определяемый выражением
v = dr /dt.
Средняя скорость пути v ср – это скаляр, определяемый выражением
V ср = Δs/Δt.
Часто встречаются и другие обозначения, например, .
Мгновенная скорость пути v – это скаляр, определяемый выражением
Модуль мгновенной скорости перемещения и мгновенная скорость пути – это одно и то же, поскольку dr = ds.
Среднее ускорение a
a ср = Δv /Δt.
Мгновенное ускорение (или просто, ускорение ) a – это вектор, определяемый выражением
a =dv /dt.
Касательное (тангенциальное) ускорение a τ (нижний индекс – это греческая строчная буква тау) – это вектор , являющийся векторной проекцией мгновенного ускорения на касательную ось .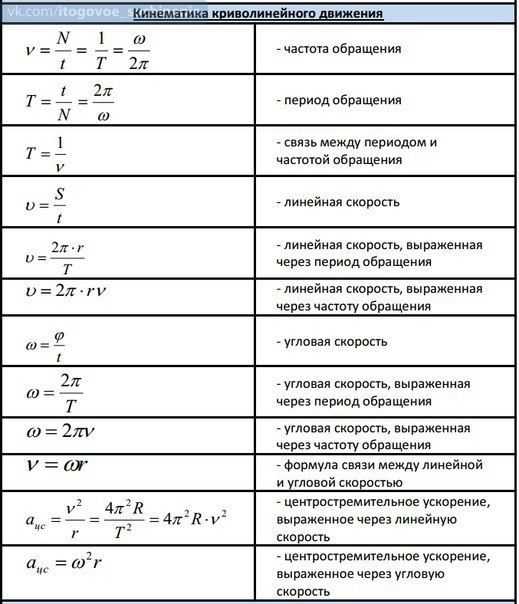
Нормальное (центростремительное) ускорение a n – это вектор , являющийся векторной проекцией мгновенного ускорения на ось нормали .
Модуль касательного ускорения
| a τ | = dv/dt,
То есть это – производная модуля мгновенной скорости по времени.
Модуль нормального ускорения
| a n | = v 2 /r,
Где r – величина радиуса кривизны траектории в точке нахождения тела.
Важно! Хочу обратить внимание на следующее. Не путайтесь с обозначениями, касающимися касательного и нормального ускорений! Дело в том, что в литературе по этому поводу традиционно наблюдается полная чехарда.
Запомните!
a τ – это вектор касательного ускорения,
a n – это вектор нормального ускорения.
a τ и a n являются векторными проекциями полного ускорения а на касательную ось и ось нормали соответственно,
A τ – это проекция (скалярная!) касательного ускорения на касательную ось,
A n – это проекция (скалярная!) нормального ускорения на ось нормали,
| a τ |- это модуль вектора касательного ускорения,
| a n | – это модуль вектора нормального ускорения.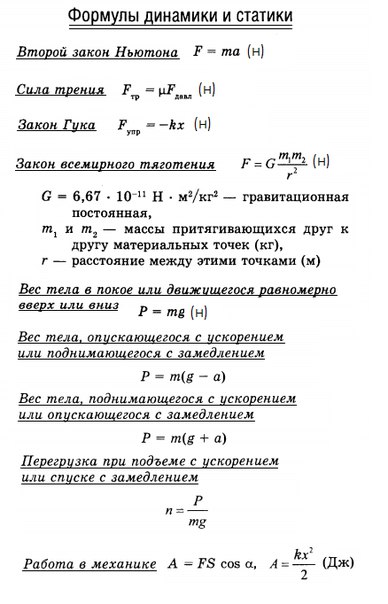
Особенно не удивляйтесь, если, читая в литературе о криволинейном (в частности, вращательном) движении, Вы обнаружите, что автор под a τ понимает и вектор, и его проекцию, и его модуль. То же самое относится и к a n . Все, как говорится, «в одном флаконе». И такое, к сожалению, сплошь и рядом. Даже учебники для высшей школы не являются исключением, во многих из них (поверьте – в большинстве!) царит полная неразбериха по этому поводу.
Вот так, не зная азов векторной алгебры или пренебрегая ими, очень легко полностью запутаться при изучении и анализе физических процессов. Поэтому знание векторной алгебры является наиглавнейшим условием успеха в изучении механики. И не только механики. В дальнейшем, при изучении других разделов физики, Вы неоднократно в этом убедитесь.
Мгновенная угловая скорость (или просто, угловая скорость ) ω – это вектор, определяемый выражением
ω = dφ /dt,
Где dφ – бесконечно малое изменение угловой координаты (dφ – вектор!).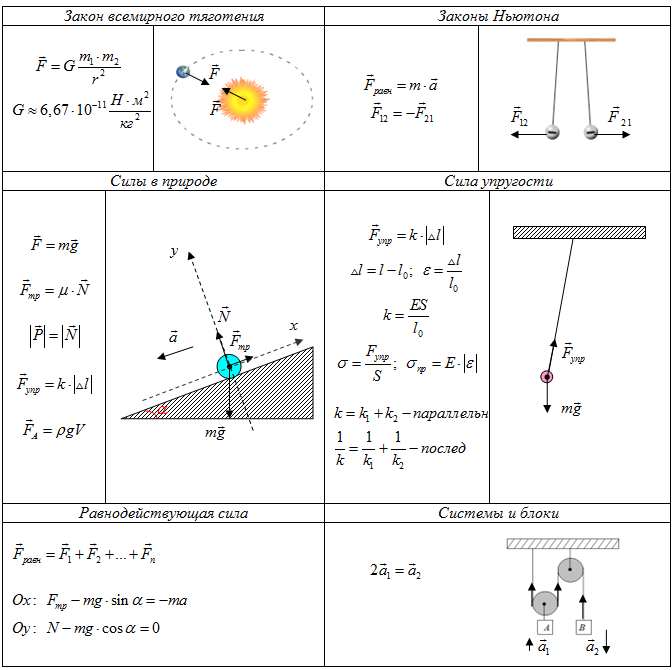
Мгновенное угловое ускорение (или просто, угловое ускорение ) ε – это вектор, определяемый выражением
ε = dω /dt.
Связь между v , ω и r :
v = ω × r .
Связь между v, ω и r:
Связь между | a τ |, ε и r:
| a τ | = ε · r.
Теперь перейдем к кинематическим уравнениям конкретных видов движения. Эти уравнения надо выучить наизусть .
Кинематическое уравнение равномерного и прямолинейного движения имеет вид:
r = r 0 + v t,
Где r – радиус-вектор объекта в момент времени t, r 0 – то же в начальный момент времени t 0 (в момент начала наблюдений).
Кинематическое уравнение движения с постоянным ускорением имеет вид:
r = r 0 + v 0 t + a t 2 /2, где v 0 скорость объекта в момент t 0 .
Уравнение для скорости тела при движении с постоянным ускорением имеет вид:
v = v 0 + a t.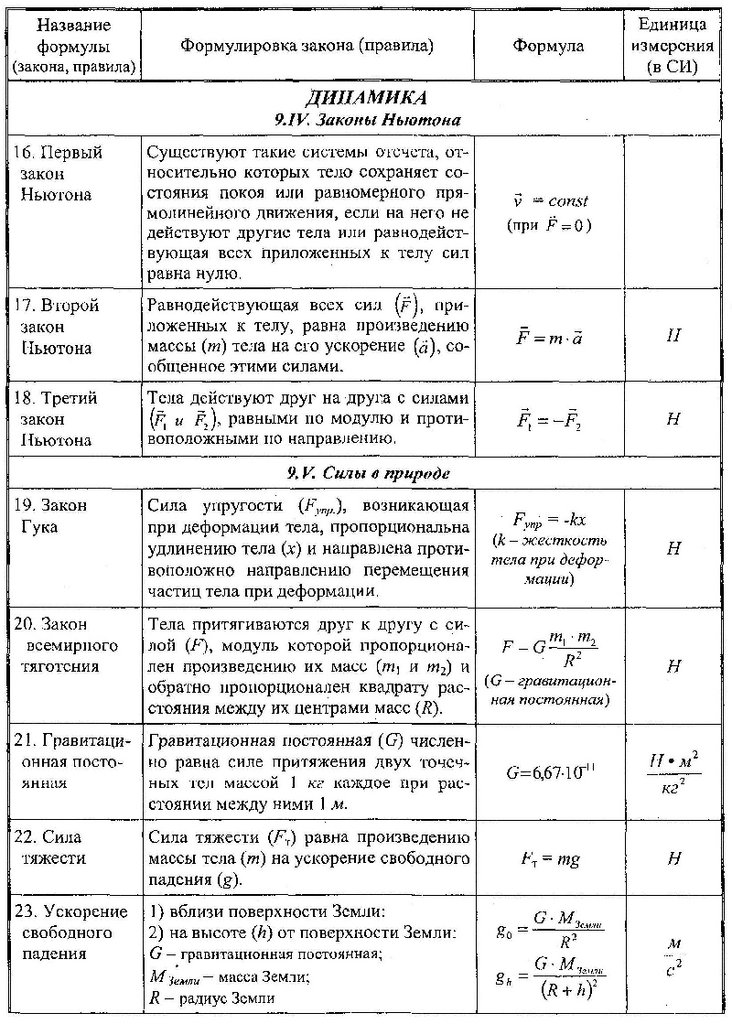
Кинематическое уравнение равномерного движения по окружности в полярных координатах имеет вид:
φ = φ 0 + ω z t,
Где φ – угловая координата тела в данный момент времени, φ 0 – угловая координата тела в момент начала наблюдения (в начальный момент времени), ω z – проекция угловой скорости ω на ось Z (обычно эта ось выбирается перпендикулярно плоскости вращения).
Кинематическое уравнение движения по окружности с постоянным ускорением в полярных координатах имеет вид:
φ = φ 0 + ω 0z t + ε z t 2 /2.
Кинематическое уравнение гармонических колебаний вдоль оси X имеет вид:
Х = А Cos (ω t + φ 0),
Где A – амплитуда колебаний, ω – циклическая частота, φ 0 – начальная фаза колебаний.
Проекция скорости точки, колеблющейся вдоль оси X, на эту ось равна:
V x = − ω · A · Sin (ω t + φ 0).
Проекция ускорения точки, колеблющейся вдоль оси X, на эту ось равна:
А x = − ω 2 · A · Cos (ω t + φ 0).
Связь между циклической частотой ω, обычной частотой ƒ и периодом колебаний T:
ω = 2 πƒ = 2 π/T (π = 3,14 – число пи).
Математический маятник имеет период колебаний T, определяемый выражением:
В числителе подкоренного выражения – длина нити маятника, в знаменателе – ускорение свободного падения
Связь между абсолютной v абс, относительной v отн и переносной v пер скоростями:
v абс = v отн + v пер.
Вот, пожалуй, и все определения и формулы, которые могут понадобиться при решении задач на кинематику. Приведенная информация носит только справочный характер и не может заменить электронную книгу, где доступно, подробно и, надеюсь, увлекательно изложена теория этого раздела механики.
Физика формулы с – Справочник
Физика формулы с
Физика — один из основных школьных предметов. Физика изучает и описывает процессы происходящие в окружающем нас мире и потому она очень интересна. Также физика очень важна и после поступления в университет, навыки полученные при изучении физики широко используются в огромном классе университетских дисциплин на многих специальностях, от инженерных и научных до архитектурных и IT специальностей. В этом разделе размещены учебные материалы по физике необходимые для успешной подготовки к ЦТ и ЕГЭ. Учебные материалы по физике включают: теорию и задачи по всем темам школьной физики, а также справочники, дополнительные задачники и учебники по физике. По приведенным здесь учебным материалам по физике возможна самостоятельная онлайн подготовка к ЦТ и ЕГЭ. Для успешной подготовки к экзаменам и обучения физике обязательно нужно изучить все темы школьной программы по физике приведенные здесь, выучить теорию и формулы, и в полном объеме выполнить приведенные задания по физике.
Также физика очень важна и после поступления в университет, навыки полученные при изучении физики широко используются в огромном классе университетских дисциплин на многих специальностях, от инженерных и научных до архитектурных и IT специальностей. В этом разделе размещены учебные материалы по физике необходимые для успешной подготовки к ЦТ и ЕГЭ. Учебные материалы по физике включают: теорию и задачи по всем темам школьной физики, а также справочники, дополнительные задачники и учебники по физике. По приведенным здесь учебным материалам по физике возможна самостоятельная онлайн подготовка к ЦТ и ЕГЭ. Для успешной подготовки к экзаменам и обучения физике обязательно нужно изучить все темы школьной программы по физике приведенные здесь, выучить теорию и формулы, и в полном объеме выполнить приведенные задания по физике.
ЗАПРЕЩЕНО использование представленных на сайте материалов или их частей в любых коммерческих целях, а также их копирование, перепечатка, повторная публикация или воспроизведение в любой форме. Нарушение прав правообладателей преследуется по закону. Подробнее.
Нарушение прав правообладателей преследуется по закону. Подробнее.
Для успешной подготовки к экзаменам и обучения физике обязательно нужно изучить все темы школьной программы по физике приведенные здесь, выучить теорию и формулы, и в полном объеме выполнить приведенные задания по физике.
Educon. by
04.11.2017 10:35:34
2017-11-04 10:35:34
Источники:
Https://educon. by/index. php/materials/phys
50 формул по физике за 7-11 класс с пояснением » /> » /> .keyword { color: red; }
Физика формулы с
Мы собрали основные формулы по физике с пояснениями в картинках. Более пятидесяти формул, разделенные по категориям физики: кинетика, динамика, статика, молекулярка, термодинамика, электричество, магнетизм, оптика, кинетика. Это не статья, а огромная шпаргалка по физике!
Более 50 основных формул по физике с пояснением обновлено: 22 ноября, 2019 автором: Научные Статьи. Ру
Основные формулы по физике: кинематика, динамика, статика
Итак, как говорится, от элементарного к сложному. Начнём с кинетических формул:
Начнём с кинетических формул:
Также давайте вспомним движение по кругу:
Медленно, но уверенно мы перешли более сложной теме – к динамике:
Уже после динамики можно перейти к статике, то есть к условиям равновесия тел относительно оси вращения:
После статики можно рассмотреть и гидростатику:
Куда же без темы “Работа, энергия и мощность”. Именно по ней даются много интересных, но сложных задач. Поэтому без формул здесь не обойтись:
Нужна помощь в написании работы?
Мы — биржа профессиональных авторов (преподавателей и доцентов вузов). Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим Бесплатно.
Основные формулы термодинамики и молекулярной физики
Последняя тема в механике – это “Колебания и волны”:
Теперь можно смело переходить к молекулярной физике:
Плавно переходим в категорию, которая изучает общие свойства макроскопических систем. Это термодинамика:
Основные формулы электричества
Для многих студентов тема про электричество сложнее, чем про термодинамика, но она не менее важна. Итак, начнём с электростатики:
Итак, начнём с электростатики:
Переходим к постоянному электрическому току:
Далее добавляем формулы по теме: “Магнитное поле электрического тока”
Электромагнитная индукция тоже важная тема для знания и понимания физики. Конечно, формулы по этой теме необходимы:
Ну и, конечно, куда же без электромагнитных колебаний:
Основные формулы оптической физики
Переходим к следующему разделу по физике – оптика. Здесь даны 8 основных формул, которые необходимо знать. Будьте уверены, задачи по оптике – частое явление:
Основные формулы элементов теории относительности
И последнее, что нужно знать перед экзаменом. Задачи по этой теме попадаются реже, чем предыдущие, но бывают:
Основные формулы световых квантов
Этими формулами приходится часто пользоваться в силу того, что на тему “Световые кванты” попадается немало задач. Итак, рассмотрим их:
На этом можно заканчивать. Конечно, по физике есть ещё огромное количество формул, но они вам не столь не нужны.
Конечно, по физике есть ещё огромное количество формул, но они вам не столь не нужны.
Это были основные формулы физики
В статье мы подготовили 50 формул, которые понадобятся на экзамене в 99 случая из 100.
Совет: распечатайте все формулы и возьмите их с собой. Во время печати, вы так или иначе будете смотреть на формулы, запоминая их. К тому же, с основными формулами по физике в кармане, вы будете чувствовать себя на экзамене намного увереннее, чем без них.
Надеемся, что подборка формул вам понравилась!
P. S. Хватило ли вам 50 формул по физике, или статью нужно дополнить? Пишите в комментариях.
Более 50 основных формул по физике с пояснением обновлено: 22 ноября, 2019 автором: Научные Статьи. Ру
Совет: распечатайте все формулы и возьмите их с собой. Во время печати, вы так или иначе будете смотреть на формулы, запоминая их. К тому же, с основными формулами по физике в кармане, вы будете чувствовать себя на экзамене намного увереннее, чем без них.

Основные формулы световых квантов.
Nauchniestati. ru
12.01.2020 7:04:15
2020-01-12 07:04:15
Источники:
Https://nauchniestati. ru/spravka/bolee-50-osnovnyh-formul-po-fizike/
Все формулы по физике » /> » /> .keyword { color: red; }
Физика формулы с
Привет! В мире физики существует множество формул и вариантов их использования. Естественно, все в голове удержать невозможно — это и понятно, гораздо важнее понимать, что они означают. Справиться с первой проблемой мы поможем — для того и был создан наш сайт, где собраны все формулы по физике, а вторую каждый должен осилить сам.
Итак, все формулы по физике собраны здесь. Над разделом с формулами по математике мы еще работаем.
В сущности, теоретическая физика слишком трудна для физиков. — Давид Гильберт
Мы собрали все формулы без описаний в краткую шпаргалку, ее ты увидишь ниже. Формулы с объяснениями ищи в соответствующих разделах сайта! Удачи!
Формулы с объяснениями ищи в соответствующих разделах сайта! Удачи!
В сущности, теоретическая физика слишком трудна для физиков. — Давид Гильберт
Справиться с первой проблемой мы поможем для того и был создан наш сайт, где собраны все формулы по физике, а вторую каждый должен осилить сам.
Xn—b1agsdjmeuf9e. xn--p1ai
19.10.2020 18:01:27
2020-10-19 18:01:27
Источники:
Http://xn--b1agsdjmeuf9e. xn--p1ai/
Физика: Все главные формулы – OKULYK.KZ
Оглавление:
- Кинематика
- Динамика
- Статика
- Гидростатика
- Импульс
- Работа, мощность, энергия
- Молекулярная физика
- Термодинамика
- Электростатика
- Электрический ток
- Магнетизм
- Колебания
- Оптика
- Атомная и ядерная физика
- Основы специальной теории относительности (СТО)
- Равномерное движение по окружности
- Расширенная PDF версия документа «Все главные формулы по школьной физике»
Кинематика
К оглавлению…
Путь при равномерном движении:
Перемещение S (расстояние по прямой между начальной и конечной точкой движения) обычно находится из геометрических соображений. Координата при равномерном прямолинейном движении изменяется по закону (аналогичные уравнения получаются для остальных координатных осей):
Координата при равномерном прямолинейном движении изменяется по закону (аналогичные уравнения получаются для остальных координатных осей):
Средняя скорость пути:
Средняя скорость перемещения:
Определение ускорения при равноускоренном движении:
Выразив из формулы выше конечную скорость, получаем более распространённый вид предыдущей формулы, которая теперь выражает зависимость скорости от времени при равноускоренном движении:
Средняя скорость при равноускоренном движении:
Перемещение при равноускоренном прямолинейном движении может быть рассчитано по нескольким формулам:
Координата при равноускоренном движении изменяется по закону:
Проекция скорости при равноускоренном движении изменяется по такому закону:
Скорость, с которой упадет тело падающее с высоты h без начальной скорости:
Время падения тела с высоты h без начальной скорости:
Максимальная высота на которую поднимется тело, брошенное вертикально вверх с начальной скоростью v0, время подъема этого тела на максимальную высоту, и полное время полета (до возвращения в исходную точку):
Формула для тормозного пути тела:
Время падения тела при горизонтальном броске с высоты H может быть найдено по формуле:
Дальность полета тела при горизонтальном броске с высоты H:
Полная скорость в произвольный момент времени при горизонтальном броске, и угол наклона скорости к горизонту:
Максимальная высота подъема при броске под углом к горизонту (относительно начального уровня):
Время подъема до максимальной высоты при броске под углом к горизонту:
Дальность полета и полное время полета тела брошенного под углом к горизонту (при условии, что полет заканчивается на той же высоте с которой начался, т. е. тело бросали, например, с земли на землю):
е. тело бросали, например, с земли на землю):
Определение периода вращения при равномерном движении по окружности:
Определение частоты вращения при равномерном движении по окружности:
Связь периода и частоты:
Линейная скорость при равномерном движении по окружности может быть найдена по формулам:
Угловая скорость вращения при равномерном движении по окружности:
Связь линейной и скорости и угловой скорости выражается формулой:
Связь угла поворота и пути при равномерном движении по окружности радиусом R (фактически, это просто формула для длины дуги из геометрии):
Центростремительное ускорение находится по одной из формул:
Динамика
К оглавлению…
Второй закон Ньютона:
Здесь: F — равнодействующая сила, которая равна сумме всех сил действующих на тело:
Второй закон Ньютона в проекциях на оси (именно такая форма записи чаще всего и применяется на практике):
Третий закон Ньютона (сила действия равна силе противодействия):
Сила упругости:
Общий коэффициент жесткости параллельно соединённых пружин:
Общий коэффициент жесткости последовательно соединённых пружин:
Сила трения скольжения (или максимальное значение силы трения покоя):
Закон всемирного тяготения:
Если рассмотреть тело на поверхности планеты и ввести следующее обозначение:
Где: g — ускорение свободного падения на поверхности данной планеты, то получим следующую формулу для силы тяжести:
Ускорение свободного падения на некоторой высоте от поверхности планеты выражается формулой:
Скорость спутника на круговой орбите:
Первая космическая скорость:
Закон Кеплера для периодов обращения двух тел вращающихся вокруг одного притягивающего центра:
Статика
К оглавлению…
Момент силы определяется с помощью следующей формулы:
Условие при котором тело не будет вращаться:
Координата центра тяжести системы тел (аналогичные уравнения для остальных осей):
Гидростатика
К оглавлению…
Определение давления задаётся следующей формулой:
Давление, которое создает столб жидкости находится по формуле:
Но часто нужно учитывать еще и атмосферное давление, тогда формула для общего давления на некоторой глубине h в жидкости приобретает вид:
Идеальный гидравлический пресс:
Любой гидравлический пресс:
КПД для неидеального гидравлического пресса:
Сила Архимеда (выталкивающая сила, V — объем погруженной части тела):
Импульс
К оглавлению…
Импульс тела находится по следующей формуле:
Изменение импульса тела или системы тел (обратите внимание, что разность конечного и начального импульсов векторная):
Общий импульс системы тел (важно то, что сумма векторная):
Второй закон Ньютона в импульсной форме может быть записан в виде следующей формулы:
Закон сохранения импульса. Как следует из предыдущей формулы, в случае если на систему тел не действует внешних сил, либо действие внешних сил скомпенсировано (равнодействующая сила равна нолю), то изменение импульса равно нолю, что означает, что общий импульс системы сохраняется:
Как следует из предыдущей формулы, в случае если на систему тел не действует внешних сил, либо действие внешних сил скомпенсировано (равнодействующая сила равна нолю), то изменение импульса равно нолю, что означает, что общий импульс системы сохраняется:
Если внешние силы не действуют только вдоль одной из осей, то сохраняется проекция импульса на данную ось, например:
Работа, мощность, энергия
К оглавлению…
Механическая работа рассчитывается по следующей формуле:
Самая общая формула для мощности (если мощность переменная, то по следующей формуле рассчитывается средняя мощность):
Мгновенная механическая мощность:
Коэффициент полезного действия (КПД) может быть рассчитан и через мощности и через работы:
Формула для кинетической энергии:
Потенциальная энергия тела поднятого на высоту:
Потенциальная энергия растянутой (или сжатой) пружины:
Полная механическая энергия:
Связь полной механической энергии тела или системы тел и работы внешних сил:
Закон сохранения механической энергии (далее – ЗСЭ).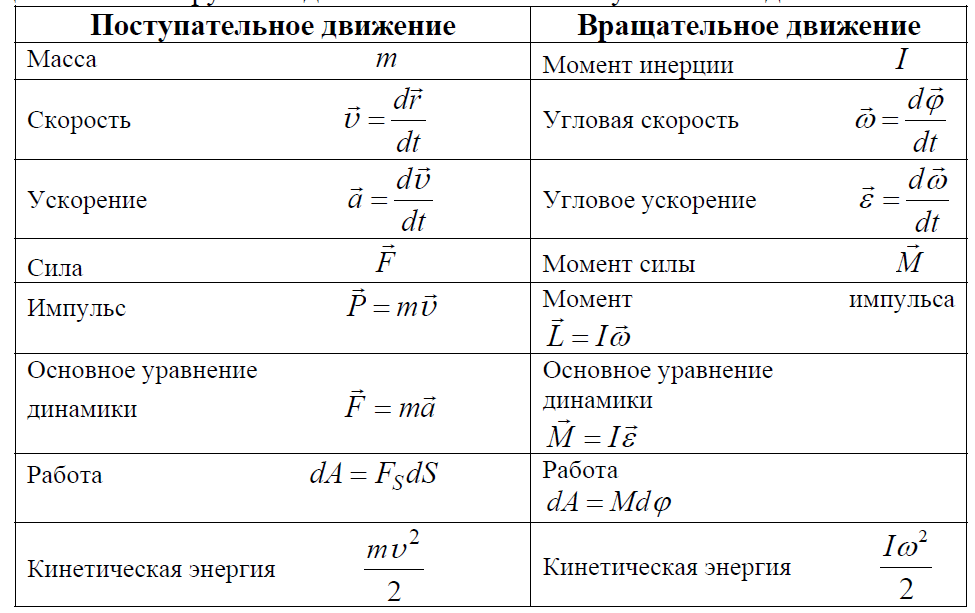 Как следует из предыдущей формулы, если внешние силы не совершают работы над телом (или системой тел), то его (их) общая полная механическая энергия остается постоянной, при этом энергия может перетекать из одного вида в другой (из кинетической в потенциальную или наоборот):
Как следует из предыдущей формулы, если внешние силы не совершают работы над телом (или системой тел), то его (их) общая полная механическая энергия остается постоянной, при этом энергия может перетекать из одного вида в другой (из кинетической в потенциальную или наоборот):
Молекулярная физика
К оглавлению…
Химическое количество вещества находится по одной из формул:
Масса одной молекулы вещества может быть найдена по следующей формуле:
Связь массы, плотности и объёма:
Основное уравнение молекулярно-кинетической теории (МКТ) идеального газа:
Определение концентрации задаётся следующей формулой:
Для средней квадратичной скорости молекул имеется две формулы:
Средняя кинетическая энергия поступательного движения одной молекулы:
Постоянная Больцмана, постоянная Авогадро и универсальная газовая постоянная связаны следующим образом:
Следствия из основного уравнения МКТ:
Уравнение состояния идеального газа (уравнение Клапейрона-Менделеева):
Газовые законы. Закон Бойля-Мариотта:
Закон Бойля-Мариотта:
Закон Гей-Люссака:
Закон Шарля:
Универсальный газовый закон (Клапейрона):
Давление смеси газов (закон Дальтона):
Тепловое расширение тел. Тепловое расширение газов описывается законом Гей-Люссака. Тепловое расширение жидкостей подчиняется следующему закону:
Для расширения твердых тел применяются три формулы, описывающие изменение линейных размеров, площади и объема тела:
Термодинамика
К оглавлению…
Количество теплоты (энергии) необходимое для нагревания некоторого тела (или количество теплоты выделяющееся при остывании тела) рассчитывается по формуле:
Теплоемкость (С — большое) тела может быть рассчитана через удельную теплоёмкость (c — маленькое) вещества и массу тела по следующей формуле:
Тогда формула для количества теплоты необходимой для нагревания тела, либо выделившейся при остывании тела может быть переписана следующим образом:
Фазовые превращения. При парообразовании поглощается, а при конденсации выделяется количество теплоты равное:
При парообразовании поглощается, а при конденсации выделяется количество теплоты равное:
При плавлении поглощается, а при кристаллизации выделяется количество теплоты равное:
При сгорании топлива выделяется количество теплоты равное:
Уравнение теплового баланса (ЗСЭ). Для замкнутой системы тел выполняется следующее (сумма отданных теплот равна сумме полученных):
Если все теплоты записывать с учетом знака, где «+» соответствует получению энергии телом, а «–» выделению, то данное уравнение можно записать в виде:
Работа идеального газа:
Если же давление газа меняется, то работу газа считают, как площадь фигуры под графиком в p–V координатах. Внутренняя энергия идеального одноатомного газа:
Изменение внутренней энергии рассчитывается по формуле:
Первый закон (первое начало) термодинамики (ЗСЭ):
Для различных изопроцессов можно выписать формулы по которым могут быть рассчитаны полученная теплота Q, изменение внутренней энергии ΔU и работа газа A.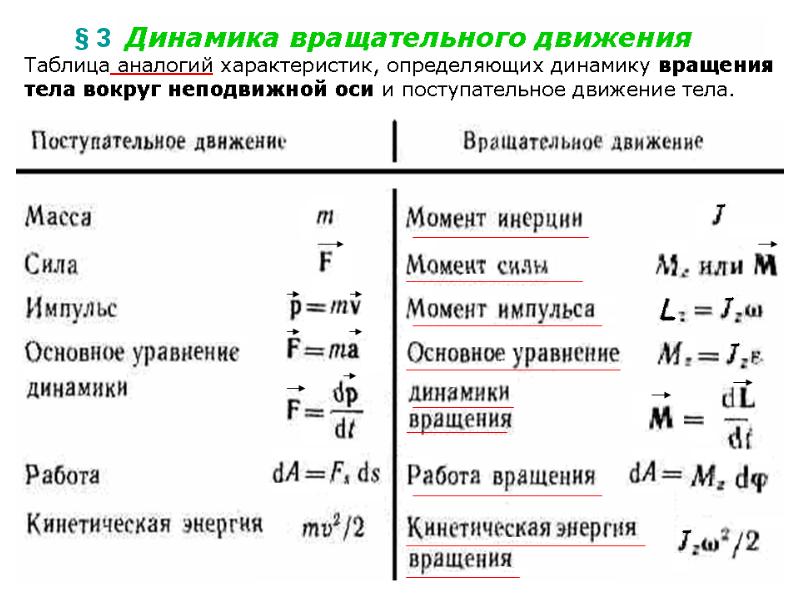 Изохорный процесс (V = const):
Изохорный процесс (V = const):
Изобарный процесс (p = const):
Изотермический процесс (T = const):
Адиабатный процесс (Q = 0):
КПД тепловой машины может быть рассчитан по формуле:
Где: Q1 – количество теплоты полученное рабочим телом за один цикл от нагревателя, Q2 – количество теплоты переданное рабочим телом за один цикл холодильнику. Работа совершенная тепловой машиной за один цикл:
Наибольший КПД при заданных температурах нагревателя T1 и холодильника T2, достигается если тепловая машина работает по циклу Карно. Этот КПД цикла Карно равен:
Абсолютная влажность рассчитывается как плотность водяных паров (из уравнения Клапейрона-Менделеева выражается отношение массы к объему и получается следующая формула):
Относительная влажность воздуха может быть рассчитана по следующим формулам:
Потенциальная энергия поверхности жидкости площадью S:
Сила поверхностного натяжения, действующая на участок границы жидкости длиной L:
Высота столба жидкости в капилляре:
При полном смачивании θ = 0°, cos θ = 1. В этом случае высота столба жидкости в капилляре станет равной:
При полном несмачивании θ = 180°, cos θ = –1 и, следовательно, h < 0. Уровень несмачивающей жидкости в капилляре опускается ниже уровня жидкости в сосуде, в которую опущен капилляр.
Электростатика
К оглавлению…
Электрический заряд может быть найден по формуле:
Линейная плотность заряда:
Поверхностная плотность заряда:
Объёмная плотность заряда:
Закон Кулона (сила электростатического взаимодействия двух электрических зарядов):
Где: k — некоторый постоянный электростатический коэффициент, который определяется следующим образом:
Напряжённость электрического поля находится по формуле (хотя чаще эту формулу используют для нахождения силы действующей на заряд в данном электрическом поле):
Принцип суперпозиции для электрических полей (результирующее электрическое поле равно векторной сумме электрических полей составляющих его):
Напряженность электрического поля, которую создает заряд Q на расстоянии r от своего центра:
Напряженность электрического поля, которую создает заряженная плоскость:
Потенциальная энергия взаимодействия двух электрических зарядов выражается формулой:
Электрическое напряжение это просто разность потенциалов, т. е. определение электрического напряжения может быть задано формулой:
В однородном электрическом поле существует связь между напряженностью поля и напряжением:
Работа электрического поля может быть вычислена как разность начальной и конечной потенциальной энергии системы зарядов:
Работа электрического поля в общем случае может быть вычислена также и по одной из формул:
В однородном поле при перемещении заряда вдоль его силовых линий работа поля может быть также рассчитана по следующей формуле:
Определение потенциала задаётся выражением:
Потенциал, который создает точечный заряд или заряженная сфера:
Принцип суперпозиции для электрического потенциала (результирующий потенциал равен скалярной сумме потенциалов полей составляющих итоговое поле):
Для диэлектрической проницаемости вещества верно следующее:
Определение электрической ёмкости задаётся формулой:
Ёмкость плоского конденсатора:
Заряд конденсатора:
Напряжённость электрического поля внутри плоского конденсатора:
Сила притяжения пластин плоского конденсатора:
Энергия конденсатора (вообще говоря, это энергия электрического поля внутри конденсатора):
Объёмная плотность энергии электрического поля:
Электрический ток
К оглавлению…
Сила тока может быть найдена с помощью формулы:
Плотность тока:
Сопротивление проводника:
Зависимость сопротивления проводника от температуры задаётся следующей формулой:
Закон Ома (выражает зависимость силы тока от электрического напряжения и сопротивления):
Закономерности последовательного соединения:
Закономерности параллельного соединения:
Электродвижущая сила источника тока (ЭДС) определяется с помощью следующей формулы:
Закон Ома для полной цепи:
Падение напряжения во внешней цепи при этом равно (его еще называют напряжением на клеммах источника):
Сила тока короткого замыкания:
Работа электрического тока (закон Джоуля-Ленца). Работа А электрического тока протекающего по проводнику обладающему сопротивлением преобразуется в теплоту Q выделяющуюся на проводнике:
Мощность электрического тока:
Энергобаланс замкнутой цепи
Полезная мощность или мощность, выделяемая во внешней цепи:
Максимально возможная полезная мощность источника достигается, если R = r и равна:
Если при подключении к одному и тому же источнику тока разных сопротивлений R1 и R2 на них выделяются равные мощности то внутреннее сопротивление этого источника тока может быть найдено по формуле:
Мощность потерь или мощность внутри источника тока:
Полная мощность, развиваемая источником тока:
КПД источника тока:
Электролиз
Масса m вещества, выделившегося на электроде, прямо пропорциональна заряду Q, прошедшему через электролит:
Величину k называют электрохимическим эквивалентом. Он может быть рассчитан по формуле:
Где: n – валентность вещества, NA – постоянная Авогадро, M – молярная масса вещества, е – элементарный заряд. Иногда также вводят следующее обозначение для постоянной Фарадея:
Магнетизм
К оглавлению…
Сила Ампера, действующая на проводник с током помещённый в однородное магнитное поле, рассчитывается по формуле:
Момент сил действующих на рамку с током:
Сила Лоренца, действующая на заряженную частицу движущуюся в однородном магнитном поле, рассчитывается по формуле:
Радиус траектории полета заряженной частицы в магнитном поле:
Модуль индукции B магнитного поля прямолинейного проводника с током I на расстоянии R от него выражается соотношением:
Индукция поля в центре витка с током радиусом R:
Внутри соленоида длиной l и с количеством витков N создается однородное магнитное поле с индукцией:
Магнитная проницаемость вещества выражается следующим образом:
Магнитным потоком Φ через площадь S контура называют величину заданную формулой:
ЭДС индукции рассчитывается по формуле:
При движении проводника длиной l в магнитном поле B со скоростью v также возникает ЭДС индукции (проводник движется в направлении перпендикулярном самому себе):
Максимальное значение ЭДС индукции в контуре состоящем из N витков, площадью S, вращающемся с угловой скоростью ω в магнитном поле с индукцией В:
Индуктивность катушки:
Где: n — концентрация витков на единицу длины катушки:
Связь индуктивности катушки, силы тока протекающего через неё и собственного магнитного потока пронизывающего её, задаётся формулой:
ЭДС самоиндукции возникающая в катушке:
Энергия катушки (вообще говоря, это энергия магнитного поля внутри катушки):
Объемная плотность энергии магнитного поля:
Колебания
К оглавлению…
Уравнение описывающее физические системы способные совершать гармонические колебания с циклической частотой ω0:
Решение предыдущего уравнения является уравнением движения для гармонических колебаний и имеет вид:
Период колебаний вычисляется по формуле:
Частота колебаний:
Циклическая частота колебаний:
Зависимость скорости от времени при гармонических механических колебаниях выражается следующей формулой:
Максимальное значение скорости при гармонических механических колебаниях:
Зависимость ускорения от времени при гармонических механических колебаниях:
Максимальное значение ускорения при механических гармонических колебаниях:
Циклическая частота колебаний математического маятника рассчитывается по формуле:
Период колебаний математического маятника:
Циклическая частота колебаний пружинного маятника:
Период колебаний пружинного маятника:
Максимальное значение кинетической энергии при механических гармонических колебаниях задаётся формулой:
Максимальное значение потенциальной энергии при механических гармонических колебаниях пружинного маятника:
Взаимосвязь энергетических характеристик механического колебательного процесса:
Энергетические характеристики и их взаимосвязь при колебаниях в электрическом контуре:
Период гармонических колебаний в электрическом колебательном контуре определяется по формуле:
Циклическая частота колебаний в электрическом колебательном контуре:
Зависимость заряда на конденсаторе от времени при колебаниях в электрическом контуре описывается законом:
Зависимость электрического тока протекающего через катушку индуктивности от времени при колебаниях в электрическом контуре:
Зависимость напряжения на конденсаторе от времени при колебаниях в электрическом контуре:
Максимальное значение силы тока при гармонических колебаниях в электрическом контуре может быть рассчитано по формуле:
Максимальное значение напряжения на конденсаторе при гармонических колебаниях в электрическом контуре:
Переменный ток характеризуется действующими значениями силы тока и напряжения, которые связаны с амплитудными значениями соответствующих величин следующим образом. Действующее значение силы тока:
Действующее значение напряжения:
Мощность в цепи переменного тока:
Трансформатор
Если напряжение на входе в трансформатор равно U1, а на выходе U2, при этом число витков в первичной обмотке равно n1, а во вторичной n2, то выполняется следующее соотношение:
Коэффициент трансформации вычисляется по формуле:
Если трансформатор идеальный, то выполняется следующее соотношение (мощности на входе и выходе равны):
В неидеальном трансформаторе вводится понятие КПД:
Волны
Длина волны может быть рассчитана по формуле:
Разность фаз колебаний двух точек волны, расстояние между которыми l:
Скорость электромагнитной волны (в т.ч. света) в некоторой среде:
Скорость электромагнитной волны (в т.ч. света) в вакууме постоянна и равна с = 3∙108 м/с, она также может быть вычислена по формуле:
Скорости электромагнитной волны (в т. ч. света) в среде и в вакууме также связаны между собой формулой:
При этом показатель преломления некоторого вещества можно рассчитать используя формулу:
Оптика
К оглавлению…
Оптическая длина пути определяется формулой:
Оптическая разность хода двух лучей:
Условие интерференционного максимума:
Условие интерференционного минимума:
Формула дифракционной решетки:
Закон преломления света на границе двух прозрачных сред:
Постоянную величину n21 называют относительным показателем преломления второй среды относительно первой. Если n1 > n2, то возможно явление полного внутреннего отражения, при этом:
Формула тонкой линзы:
Линейным увеличением линзы Γ называют отношение линейных размеров изображения и предмета:
Атомная и ядерная физика
К оглавлению…
Энергия кванта электромагнитной волны (в т. ч. света) или, другими словами, энергия фотона вычисляется по формуле:
Импульс фотона:
Формула Эйнштейна для внешнего фотоэффекта (ЗСЭ):
Максимальная кинетическая энергия вылетающих электронов при фотоэффекте может быть выражена через величину задерживающего напряжение Uз и элементарный заряд е:
Существует граничная частота или длинна волны света (называемая красной границей фотоэффекта) такая, что свет с меньшей частотой или большей длиной волны не может вызвать фотоэффект. Эти значения связаны с величиной работы выхода следующим соотношением:
Второй постулат Бора или правило частот (ЗСЭ):
В атоме водорода выполняются следующие соотношения, связывающие радиус траектории вращающегося вокруг ядра электрона, его скорость и энергию на первой орбите с аналогичными характеристиками на остальных орбитах:
На любой орбите в атоме водорода кинетическая (К) и потенциальная (П) энергии электрона связаны с полной энергией (Е) следующими формулами:
Общее число нуклонов в ядре равно сумме числа протонов и нейтронов:
Дефект массы:
Энергия связи ядра выраженная в единицах СИ:
Энергия связи ядра выраженная в МэВ (где масса берется в атомных единицах):
Формула альфа-распада:
Формула бета-распада:
Закон радиоактивного распада:
Ядерные реакции
Для произвольной ядерной реакции описывающейся формулой вида:
Выполняются следующие условия:
Энергетический выход такой ядерной реакции при этом равен:
Основы специальной теории относительности (СТО)
К оглавлению…
Релятивистское сокращение длины:
Релятивистское удлинение времени события:
Релятивистский закон сложения скоростей. Если два тела движутся навстречу друг другу, то их скорость сближения:
Релятивистский закон сложения скоростей. Если же тела движутся в одном направлении, то их относительная скорость:
Энергия покоя тела:
Любое изменение энергии тела означает изменение массы тела и наоборот:
Полная энергия тела:
Полная энергия тела Е пропорциональна релятивистской массе и зависит от скорости движущегося тела, в этом смысле важны следующие соотношения:
Релятивистское увеличение массы:
Кинетическая энергия тела, движущегося с релятивистской скоростью:
Между полной энергией тела, энергией покоя и импульсом существует зависимость:
Равномерное движение по окружности
К оглавлению…
В качестве дополнения, в таблице ниже приводим всевозможные взаимосвязи между характеристиками тела равномерно вращающегося по окружности (T – период, N – количество оборотов, v – частота, R – радиус окружности, ω – угловая скорость, φ – угол поворота (в радианах), υ – линейная скорость тела, an – центростремительное ускорение, L – длина дуги окружности, t – время):
Расширенная PDF версия документа «Все главные формулы по школьной физике»:
К оглавлению…
Динамика | Физика для идиотов
Содержание
|
Динамика — это название, данное правилам движения. Это то, что, как вы думаете, будет одной из первых вещей, которые нужно выяснить, но не было полностью заблокировано до недавнего времени. При этом правила не сильно изменились и довольно предсказуемы, по крайней мере, в больших масштабах. Кто-то однажды сказал мне, что все, что вам нужно знать для экзамена по динамике, это: а все остальное можно вывести из этого. Я так и не узнал, были ли они правы, я выучил и эти, на всякий случай:
Если вы уже знакомы с уравнениями, вы можете сразу перейти к следующему разделу, иначе я объясню, откуда они взялись и как их использовать.
При работе с измерениями вы можете использовать скалярные или векторные величины.
Скалярные величины:
- Имеют только величину.
- Энергия, Длина, Масса, Скорость, Температура и Время — скалярные величины.
Векторные величины:
- Имеют как величину, так и направление
- Перемещение, Сила, Скорость, Ускорение и Импульс являются векторными величинами.
Иногда может показаться, что скорость и скорость — это одно и то же (часто они равны друг другу), но на самом деле они немного разные. Скорость — это просто то, насколько быстро что-то движется, не имеет значения, движется ли оно вверх, вниз, влево или вправо, важно только то, как далеко оно проходит за заданное время. Вероятно, лучший способ рассмотреть скорость — это если вы думаете об обычной оси x, y. Если тело движется горизонтально по прямой линии со скоростью 10 , затем останавливается и движется в прямо противоположном направлении, то со скоростью 10 явно произошло изменение, однако скорость этого не отражает. Скорость до поворота такая же, как и после. Однако скорость не одинакова. Если бы мы сказали, что начальная скорость была такой же, как скорость: 10 , тогда, когда тело движется в прямо противоположном направлении с той же скоростью, скорость была бы -10 .
Исаак Ньютон был умным парнем. Мы должны благодарить его за гравитацию (вероятно, я должен добавить, что он ее открыл, а не изобрел, иначе люди начнут винить его каждый раз, когда падают). Больше всего Ньютон известен (кроме случая с яблоком) своими законами движения:
- Частица останется в покое или продолжит свое движение, если на нее не подействуют внешние силы.
- Сила, действующая на объект, равна его массе, умноженной на его ускорение ().
- Каждое действие имеет равное и противоположное противодействие.
Все это хорошо, но что на самом деле означают эти законы?
1. Частица останется в покое или продолжит свое движение, если на нее не действует внешняя сила.
Это просто означает, что если на частицу не действует внешняя сила, она никак не изменит своего движения. Если бы не было трения или сопротивления воздуха, то частица, движущаяся со скоростью 5 , двигалась бы бесконечно. Очевидно, что в реальной жизни этого не происходит, так как есть сопротивление воздуха и трение, поэтому почти невозможно не иметь внешней силы на движущуюся частицу. Однако, если вы думаете о стационарной частице, это имеет гораздо больше смысла. Если к неподвижной частице не приложена сила, она не начнет двигаться.
2. Сила, действующая на объект, равна произведению его массы на его ускорение.
Более известная как , это, вероятно, одна из самых фундаментальных формул в Dynamics. Это один из тех, которые появляются повсюду в Dynamics, и это действительно хорошая идея для изучения. Тоже не сложно понять. Имеет смысл, что если что-то имеет большую массу, потребуется большая сила, чтобы придать ему то же ускорение, что и чему-то с меньшей массой.
3. Каждое действие имеет равное и противоположное противодействие
Этот закон в основном означает, что если вы толкаете стену, она отталкивает вас назад, и это действительно хорошая работа, потому что в противном случае вы бы прошли насквозь!
У них так много разных названий, что иногда трудно уследить. Возможно, вы слышали, что их называют кинематическими уравнениями, уравнениями движения, уравнениями SUVAT, а может быть, вы вообще о них не слышали. Прежде всего давайте взглянем на них:
(1)
(2)
(3)
(4)
(5)
Может показаться, что там нужно запомнить многое, но поверьте, это не так сложно, как кажется. Например, эти уравнения невероятно важны в динамике.
SUVAT Уравнение 1
Как вы, наверное, уже знаете, скорость, деленная на время, равна ускорению, а скорость, умноженная на время, равна перемещению. Это означает, что на графике зависимости скорости от времени градиент линии равен ускорению, а площадь под линией равна смещению.
Если у вас есть начальная скорость и конечная скорость, график будет выглядеть примерно так:
График, показывающий зависимость u от tКак я уже говорил ранее, градиент линии равен ускорению . Так . Преобразовывая это, чтобы сделать объект, мы получаем нашу первую формулу постоянного ускорения:
SUVAT Уравнение 2
Итак, один меньше, осталось всего четыре!
Мы знаем, что площадь под графиком равна смещению. Итак, мы знаем, что умножение на дает нам нижний прямоугольник области и деление на 2 дает нам верхний треугольник. Это дает нам:
Теперь мы это уже знаем, поэтому мы можем изменить это, чтобы дать, а затем подставить это в наше уравнение для смещения. От этого имеем. Если мы просто перемножим скобки, которые дают нам нашу вторую формулу:
Тем из вас, кто любит находить математику там, где они могут, вам может быть интересно узнать, что это интеграл по отношению к . Если для вас это не имеет смысла, почему бы не заглянуть в замечательный раздел Интеграция , где все станет ясно!
SUVAT Уравнение 3
Те из вас, кто любит находить закономерности, возможно, заметили, что это уравнение очень похоже на предыдущее. Это потому, что он очень похож на последний. Те из вас, кто решил не заходить на страницу Интеграция , могут сейчас пожалеть об этом.
Если вы переставите субъект, вы получите:
Теперь вам просто нужно проинтегрировать этот результат по времени, чтобы получить наше третье уравнение:
СУВАТ Уравнение 4
Мы уже установили, что площадь под графиком (равная смещению ) равна:
Если мы умножим скобку, то получим:
что то же самое, что:
Уравнение 5
, что можно упростить до
, а затем
это в конечном итоге дает нам окончательную форму
! Эти уравнения определенно стоит изучить, поскольку они снова и снова пригодятся. Есть пара правил, например, их можно использовать только в тех случаях, когда есть постоянное ускорение. Это означает, что если ускорение составляет что-то вроде 12 мс -2 в порядке, но если ускорение соответствует линиям 12 мс -2 , то они не будут работать, так как ускорение меняется в зависимости от .
Большая часть динамики достигается за счет пренебрежения сопротивлением воздуха, и хотя это значительно упрощает работу, всегда стоит знать, какое влияние оно окажет. Для любого объекта, движущегося в жидкости, сила сопротивления, действующая на него, может быть рассчитана по следующей формуле:
— плотность жидкости (998,2071 кг·м для воды при 30 градусах и 1,204 кг·м для воздуха), — скорость объекта. , – площадь поперечного сечения объектов, – коэффициент лобового сопротивления. Коэффициент аэродинамического сопротивления — это число, которое относится к тому, насколько аэродинамическим является объект, при этом куб имеет , а сфера — .
Объект, падающий на Землю, в конце концов (если он падает достаточно долго) достигает скорости, при которой сила сопротивления равна силе гравитации, притягивающей его вниз. Это называется Конечная скорость , и вы можете получить выражение для него, приравняв силу сопротивления и затем переставив для:
коэффициент лобового сопротивления около 0,8 (грубая оценка где-то около углового куба или цилиндра), мы получаем конечную скорость около 53 м с (что оказывается довольно хорошей грубой оценкой).
Это самый простой экземпляр в динамике. Тело движется по плоской поверхности прямолинейно. Например:
1. Преподобный едет на своей машине, как вдруг двигатель перестает работать! Если он движется со скоростью 10 мс -1 и его замедление составляет 2 мс -2 , сколько времени потребуется, чтобы автомобиль остановится?
Хорошо, при таких проблемах всегда полезно перечислить то, что вы знаете. Даны начальная скорость , и ускорение . Мы также знаем, что если автомобиль собирается остановиться в состоянии покоя, то конечная скорость должна быть 0 мс -1 . Мы хотим узнать время, . Лично я считаю, что лучше всего представить эту информацию следующим образом:
u = 10 мс -1
v = 0 мс -1
a = -2 мс -2
t = ? s
Отсюда видно, какое уравнение нам нужно. В этом случае мы можем видеть, что уравнение, которое мы хотим, есть. Мы переставляем это, чтобы сделать субъект, что дает нам
Наконец, мы подставляем числа в уравнение:
.
2. Майкл выходит на дорогу, в 30 метрах от места, где перестает работать двигатель. Очки преподобного слетели, и он не видит Майкла. Успеет ли машина вовремя остановиться, чтобы не сбить Майкла?
Еще раз лучше выложить всю имеющуюся у нас информацию:
u = 10 мс -1
v = 0 мс -1
a = -2 мс -2
t = 5 с
с = ? m
На этот раз мы хотим найти смещение, с, поэтому нам нужно выбрать уравнение с этим значением. Я собираюсь использовать . Я мог бы использовать или , однако, поскольку нам не дали времени, а вместо этого мы сделали это сами, любая ошибка, допущенная в предыдущих расчетах, будет перенесена в этот.
Я снова перестрою уравнение, на этот раз указав в качестве подлежащего. Это хорошая привычка, сейчас может не иметь большого значения, переставляете ли вы уравнение до или после ввода чисел, но с более сложными формулами это может стать действительно беспорядочным, если вы не переставите его сначала. Кроме того, в экзаменационных ситуациях, если вы допустили ошибку, вы все равно можете получить оценки за метод, если экзаменатор увидит, что вы сделали.
В любом случае, это дает нам
Подставляя числа в уравнение, мы получаем:
, чтобы Майкл не пострадал! (Уф!)
В приведенном выше примере трение было полностью проигнорировано. В реальном мире мы не можем этого сделать (на самом деле нам очень повезло, потому что мы все время падали, и люди думали, что мы пьяны). Итак, теперь нам лучше рассмотреть ситуацию с трением. Коэффициент трения обозначен символом μ. Результирующая (нормальная) сила веса уравновешивает вес автомобиля (чтобы он не ехал по дороге). Сила трения равна μ (или μN).
3. Машина Рева сломалась на трассе М1. Ему нужно подтолкнуть его к твердому плечу. Вес автомобиля 5000 Н. Rev может толкать около 1800 Н. Коэффициент трения между автомобилем и дорогой равен 0,6. Сможет ли The Rev столкнуть машину с обочины?
Итак, во-первых, в такой ситуации хорошо бы сделать небольшой набросок того, что происходит.
Отсюда мы знаем, что для того, чтобы автомобиль двигался, Rev должен толкать с силой не менее µR. Просто умножая коэффициент трения на результирующую силу, мы находим, что сила трения составляет 3000 Н, поэтому Rev не сможет оттолкнуть машину к обочине.
4. Мимо проезжает кузовщик, и, пытаясь разгрузить загруженную трассу M1, он решает помочь. Он может толкать с силой 3200Н. Каково будет ускорение автомобиля, когда кузовщик и Rev подталкивают его?NB – Примите массу автомобиля равной 510 кг
Итак, на самом деле та же ситуация, что и раньше, только на этот раз силы не уравновешены, и поэтому будет ускорение. Мы получаем это от умнейшего Исаака Ньютона, .
Помните, что для нахождения общей силы необходимо вычесть силу трения. Итак, (3200 + 1800) – 3000. Итого общая сила составляет 2000 Н. Нам снова нужно изменить формулу, чтобы на этот раз было в качестве подлежащего. Это дает нам. Подставляя числа, получаем:
a = 3,9 мс -2 (2 s.f.)
Это очень похоже на движение на плоской поверхности, только одна или две дополнительные переменные… о, и мы не будем говорить больше о машине Преподобного , так как я не уверен, что она поднялась бы в гору!
В любом случае, боюсь, я немного сбился с пути. Введение «наклонной плоскости» или «наклона», как это известно большинству из нас, означает, что вам придется освежить свою тригонометрию. С положительной стороны, вы узнаете, почему люди пытались вбить это в вас годами! Если вы знакомы со старым добрым порядком операций, все должно быть в порядке.
Итак, давайте начнем с простого примера.
Пример наклонной плоскости На рисунке выше показан блок, стоящий на склоне. Хорошее место для начала с этого (вероятно, единственное место для начала, если вы хотите, черт возьми, шанс добиться чего-либо с вопросом) — это разрешение сил. Предполагая, что блок находится в состоянии покоя, мы знаем, что он находится в равновесии, поэтому горизонтальные силы должны быть равны, как и вертикальные силы (если только это не один из тех милых левитирующих блоков).
Снаряды не полностью отличаются от Движения по прямой линии, просто тело движется не слева направо, а вверх или вниз. Сначала рассмотрим типичный пример движения снаряда:
Мяч брошен под углом 30°. Он имеет начальную скорость 20 мс -1 . Найдите максимальную высоту, на которую может подняться мяч.
Итак, как обычно, рисуем диаграмму:
Пример движения снарядаТеперь давайте перечислим, что мы знаем:
- u = 20 sin30 мс -1
- v = 0 мс -1
- а = -9,81 мс -2
- с = ? м
Теперь мы выбираем одну из кинематических формул, которая даст нам результат самым прямым образом: , и переставляем ее так, чтобы получился субъект:
Затем, наконец, подставляем числа в уравнение:
и выскакивает ответ:
Видите, не так уж и сложно было? Вопросы о снарядах иногда могут показаться довольно сложными, но если вы не забудете просто использовать тригонометрию для нахождения компонентов x и y, вы не ошибетесь.
Иногда вы будете знать максимальную высоту, но какой-то другой компонент будет отсутствовать. Например, время, когда мяч находится в воздухе… Опять же, это не проблема, просто посмотрите, что вы делаете знаете, и используйте формулы, чтобы вычислить остальное.
Динамика | Формулы физики | Математика
Инерция, масса, ускорение
Находить
Известно, что:
а1а2м2м1 =
Вычислить ‘a1’Сила, масса, ускорение
Находить
Известно, что:
Fma =
Рассчитать FСила тяжести
Находить
Известно, что:
Нмг =
Рассчитать ‘N’Сила трения
Находить
Известно, что:
F_frµN =
Рассчитать ‘F_fr’Сила трения
Находить
Известно, что:
F_frмкмг =
Рассчитать ‘F_fr’Закон всемирного тяготения
Находить
Известно, что:
ФГм1м2р =
Рассчитать ‘F’Центростремительное ускорение спутника
Находить
Известно, что:
avRh =
Рассчитать ‘a’Скорость (скорость) спутника
Находить
Известно, что:
vGMRh =
Рассчитать ‘v’Первая космическая скорость (движение по круговой орбите)
Находить
Известно, что:
vgR =
Рассчитать ‘v’Секундная (убегающая) космическая скорость (преодолеть гравитацию)
Находить
Известно, что:
vgR =
Вычислить ‘v’Третий закон Кеплера
Находить
Известно, что:
T1T2a1a2 =
Рассчитать «T1»Ускорение свободного падения у поверхности земли
Находить
Известно, что:
gGMR =
Рассчитать «г»Масса тела
Находить
Известно, что:
Пмг =
Рассчитать «P»Масса тела: невесомость
Находить
Известно, что:
Пмга =
Рассчитать «P»Масса тела: перегрузка
Находить
Известно, что:
Пмга =
Расчет ‘P’Время торможения (остановки)
Находить
Известно, что:
tmvF_fr =
Расчет ‘t’Время торможения (остановки)
Находить
Известно, что:
твмкг =
Рассчитать ‘t’Тормозной (остановочный) путь
Находить
Известно, что:
smvF_fr =
Рассчитать «s»Тормозной (остановочный) путь
Находить
Известно, что:
свмкг =
Рассчитать «s»Сила трения качения
Находить
Известно, что:
F_frμNR =
Рассчитать ‘F_fr’Сила упругости
Находить
Известно, что:
F_elastkx =
Расчет ‘F_elast’Кинетическая энергия или вращающееся тело
Находить
Известно, что:
W_kJω =
Вычислить ‘W_k’Формулы динамики – Объяснение с примерами решений и часто задаваемыми вопросами
Физика — это отрасль науки, изучающая материю, ее основные составы, движение, поведение в пространстве и времени и их отношения с энергией и силой. Физика — это огромная область для изучения, поэтому она делится на множество частей в зависимости от области, на которой она сосредоточена. Динамика – это раздел физики. Динамика — это раздел механики, изучающий воздействие силы на все, что находится в движении. Это изучение сил и движения тел. Первые физические законы, управляющие динамической частью физики, были разработаны Исааком Ньютоном. Далее он делится на две части: линейную динамику и нелинейную. Линейное означает, что движение тела происходит по прямой линии, а нелинейное включает в себя движение тела, которое не является прямой линией, как при движении по окружности или в форме эллипса.
Формула динамики
Для понимания и расчета действия силы на движущееся тело были разработаны некоторые формулы или уравнения. Эти уравнения известны под общим названием «формулы динамики». Для расчета этих уравнений сделаем некоторые предположения. Рассмотрим частицу массой « m» , движущуюся с начальной скоростью «u» , частица ускорена до скорости «v» . Частица ускоряется с ускорением «а» за время «т ». Скорость изменения скорости известна как ускорение. Он представлен с помощью а.
a = (v – u) / t
Если тело движется с постоянной скоростью, то ускорение равно нулю, так как и u, и v равны нулю. Если тело движется с постоянным ускорением, то ускорение не равно нулю при изменении значения v, а равномерно. И если скорость тела уменьшается с увеличением времени, то это известно как замедление.
Уравнения динамики приведены как,
- V = U + AT
- S = UT + при 2 /2 (для ускорения)
- S = UT – at 205 /25 /25 /25 /25 /25 /902 2 (в этом случае для замедления как a = -a)
- v 2 – u 2 = 2as
- s = (1/2)(v + 509
9000 В приведенных выше уравнениях v — конечная скорость, единица измерения — метр в секунду, u — начальная скорость, единица измерения — метры в секунду, a — ускорение, единица измерения — метры в секунду в квадрате, s — смещение и единица измерения.
Вывод первого уравнения движения
Вывод второго уравнения движенияСогласно определению ускорения, оно определяется как скорость изменения скорости.
Математически это может быть выражено как:
a = dv/dt
Умножить dt с обеих сторон,
=> a.dt = dv
Интегрируя с обеих сторон,
(предел dv равен u v)
(предел dt от 0 до t)
∫ 0 t a dt = ∫ u v dv
=> at = v – u
=> v = u + at
Вывод второго графического метода уравнения движенияСредняя конечная скорость тела. из первого уравнения движения мы знаем, что .
=> v = с/т
Подставьте значение v в первое уравнение.
=>V сред = (u + u + at)/2
=V сред = (2u + at)/2
=> V сред = u + at(1/2)
=> s/t = u + at(1/2)
=> s = ut + at 2 (1/2)
Вывод третьего уравнения движения графическим методомГрафик зависимости скорости от времени
Площадь под графиком представляет собой перемещение тела.
Пройденное расстояние (с) = Площадь OADC = Площадь OADC + Площадь ABD
=> s = (AD × BD × 1/2) + (OA × OC)
Согласно графику
OA = u
ОС = t
AD = t
BD = v-u
=> s = (t × at × 1/2) + ut
=> s = ut + at(1/2)
График зависимости скорости от времени
Площадь под графиком представляет собой перемещение тела.
Площадь под графиком = площадь трапеции OABC
=> s = (1/2) × ((сумма параллельных сторон) × высота
s = 1/2 x (OA + CB) x OC
Из графика
OA = u
CB = v
OC = t
=> s = 1/2 x (u + v) x t
Мы знаем, что t = (v – u)/ a
=> s = 1/2 x ((u + v) × (v – u))/a
=> s = 1/2 x (v + u) × (v – u)/a
= >s = (v 2 – u 2 )/2a
=> 2as = v 2 – u 2
Решенные примеры по динамике
Пример 1: Махеш бросает мяч в горизонтальном направлении.
Ответ:
Поскольку тело брошено, это означает, что начальная скорость равна нулю.
=> u = 0
Путь, пройденный мячом, равен смещению.
=> с = 80 метров
Период времени t = 4 с.
Используя уравнение:
s = ut + at 2 /2
80 = 0(4) + a(4) 2 /2
80 = a.8
=> 10 м/с 2
Следовательно, ускорение тела после этого равно 10 м/с 2 .
Пример 2: Тело движется с постоянным ускорением 10 м/с 2 . Если начальная скорость тела 5 м/с, то какой будет его скорость через 2 с?
Ответ:
Ускорение тела 10 м/с 2
=> a = 10
Начальная скорость 5 м/с.
=> u = 5 м/с
Период времени 2 сек.
=> t = 2 с
Используя уравнение:
v = u + at
=> v = 5 + 10(2)
=> v = 5 + 20
=> v = 25 м/с
Следовательно, скорость тела через 2 секунды равна 25 м/с.
Пример 3: Тело движется с постоянным ускорением 10 м/с 2 . Чему будет равно его перемещение, если начальная скорость тела 5 м/с, а конечная скорость 105 м/с?
Ответ:
Ускорение тела равно 10 м/с 2 .
=> a = 10
Начальная скорость 5 м/с.
=> u = 5 м/с
Конечная скорость 105 м/с.
=> v = 105 м/с
Используя уравнение,
v 2 – u 2 = 2as
=> 105 2 – 5 2 = 2(10)1(s) 9000 25)/20
=> с = 550 с
Следовательно, период времени составляет 550 секунд.
Пример 4. Каково будет перемещение тела, если начальная и конечная скорости равны 20 и 70 м/с соответственно за 5 секунд?
Ответ:
Начальная скорость 20 м/с.
=> u = 20 м/с
Конечная скорость 170 м/с.
=> v = 70 м/с
Период времени 5 сек.
=> t = 5 с
Используя уравнение:
s = (1/2) (v + u)t
=> s = (0,5) (70 + 20)(5) > s = 550 метров
Пример 5: Автомобиль движется со скоростью 50 м/с, когда водитель видит человека, переходящего дорогу, притормаживает, и автомобиль останавливается через 4 секунды. Вычислите расстояние, пройденное автомобилем.
Ответ:
Начальная скорость 50 м/с.
=> u = 50 м/с
Конечная скорость равна 0 м/с.
=> v = 0 м/с
Период времени составляет 4 секунды.
=> t = 4s
Используя уравнение: => s = 100 метров
Следовательно, перемещение тела равно 100 м.
Пример 6: Автомобиль замедляется со скоростью 6 м/с 2 . Какое расстояние проедет автомобиль, если его начальная скорость равна 20 м/с, а время остановки автомобиля равно 3 с?
Ответ:
Часто задаваемые вопросы по DynamicsЗамедление тела 6 м/с 2
=> a = 6
Начальная скорость 20 м/с.
=> u= 20 м/с
Период времени 3 сек.
=> t = 3 с
Используя уравнение:
с = ut – at 2 /2
с = 20(3) + 6(3) 2 /2
с = 60+27
=> с = 87 м
кузов 87 м.
Вопрос 1. Что такое ускорение?
Ответ:
Скорость изменения скорости называется ускорением. Он представлен с помощью а.
=> a = (v – u)/t
Если тело движется с постоянной скоростью, то ускорение равно нулю, поскольку и u, и v равны нулю. Если тело движется с постоянным ускорением, то ускорение не равно нулю при изменении значения v, а равномерно. И если скорость тела уменьшается с увеличением времени, то это известно как замедление.
Вопрос 2: Объясните концепцию динамики.
Решение:
Динамика определяется как раздел механики, который исследует причины изменений в механическом движении.
Вопрос 3: Напишите несколько реальных примеров динамической силы.
Решение:
Примерами динамики из повседневной жизни являются движение автомобиля, землетрясение, удар по мячу для крикета или надувание воздушного шара.
6.3 Вращательное движение — физика
Раздел Цели обучения
К концу этого раздела вы сможете делать следующее:
- Описывать вращательные кинематические переменные и уравнения и связывать их с их линейными аналогами
- Опишите крутящий момент и плечо рычага
- Решение задач, связанных с крутящим моментом и кинематикой вращения
Поддержка учителей
Поддержка учителей
Цели обучения в этом разделе помогут вашим учащимся освоить следующие стандарты:
- (4) Научные концепции.
- (C) анализировать и описывать ускоренное движение в двух измерениях, используя уравнения, включая примеры снарядов и окружностей.
- (D) рассчитать действие сил на объекты, включая закон инерции, связь между силой и ускорением и характер пар сил между объектами.
Кроме того, в Руководстве по физике для средней школы рассматривается содержание этого раздела лабораторной работы под названием «Круговое и вращательное движение», а также следующие стандарты:
- (4) Научные концепции. Учащийся знает и применяет законы, управляющие движением, в различных ситуациях. Ожидается, что студент:
- (D) рассчитать действие сил на объекты, включая закон инерции, связь между силой и ускорением и природу пар сил между объектами.
Основные термины раздела
угловое ускорение кинематика вращательного движения рычаг тангенциальное ускорение крутящий момент Кинематика вращения
Поддержка учителей
Поддержка учителей
[BL][OL] Повторить уравнения линейной кинематики.
Предупреждение о заблуждении
Студенты могут запутаться между замедлением и увеличением ускорения в отрицательном направлении.
В разделе, посвященном равномерному круговому движению, мы обсуждали движение по окружности с постоянной скоростью и, следовательно, с постоянной угловой скоростью. Однако бывают случаи, когда угловая скорость непостоянна — вращательное движение может ускоряться, замедляться или изменять направление. Угловая скорость не является постоянной, когда вращающийся фигурист тянет руки, когда ребенок толкает карусель, чтобы заставить ее вращаться, или когда компакт-диск останавливается при выключении. Во всех этих случаях угловое ускорение возникает из-за изменения угловой скорости ωω. Чем быстрее происходит изменение, тем больше угловое ускорение. Угловое ускорение αα – скорость изменения угловой скорости. В форме уравнения угловое ускорение равно
α=ΔωΔt,α=ΔωΔt,
где ΔωΔω — изменение угловой скорости, а ΔtΔt — изменение во времени.
Рисунок 6,9 Фигуристка вращается против часовой стрелки, поэтому ее угловая скорость обычно считается положительной. (Luu, Wikimedia Commons)
Соотношение между величинами тангенциального ускорения a и углового ускорения
α,isa=rαorα=ar.α,isa=rαorα=ar.
6.10
Эти уравнения означают, что величины тангенциального ускорения и углового ускорения прямо пропорциональны друг другу.
Советы для успеха
Тангенциальное ускорение иногда обозначается a t . Это линейное ускорение в направлении, касательном к окружности в интересующей точке при круговом или вращательном движении. Помните, что тангенциальное ускорение параллельно тангенциальной скорости (либо в том же направлении, либо в противоположном направлении).
До сих пор мы определили три вращательные переменные: θθ, ωω и αα. Это угловые версии линейных переменных x , на и на . Следующие уравнения в таблице представляют величину переменных вращения и только тогда, когда радиус постоянен и перпендикулярен переменной вращения. Таблица 6.2 показывает, как они связаны.
Поворотный Линейный Отношения θθ х θ=xrθ=xr ωω v ω=vrω=vr αα и α=арα=ар Стол 6.
Теперь мы можем начать видеть, как вращательные величины, такие как θθ, ωω и αα, связаны друг с другом. Например, если колесо мотоцикла, находящееся в состоянии покоя, имеет большое угловое ускорение в течение достаточно долгого времени, оно в конечном итоге начинает быстро вращаться и делает много оборотов. В терминах переменных, если угловое ускорение колеса αα велико в течение длительного периода времени t , то конечная угловая скорость ωω и угол поворота θθ велики. В случае линейного движения, если объект находится в состоянии покоя и испытывает большое линейное ускорение, то он имеет большую конечную скорость и пройдёт большое расстояние.
Кинематика вращательного движения описывает соотношения между углом поворота, угловой скоростью, угловым ускорением и временем. Это только описывает движение — оно не включает никаких сил или масс, которые могут повлиять на вращение (это часть динамики).
Как и в линейной кинематике, мы предполагаем, что a является постоянным, что означает, что угловое ускорение αα также является постоянным, поскольку a=rαa=rα. Уравнение кинематической зависимости между ωω, αα и t равно
ω=ω0+αt(константаα),ω=ω0+αt(константаα),
, где ω0ω0 — начальная угловая скорость. Обратите внимание, что уравнение идентично линейной версии, за исключением угловых аналогов линейных переменных. Фактически все уравнения линейной кинематики имеют аналоги вращения, которые приведены в таблице 6.3. Эти уравнения можно использовать для решения вращательной или линейной задачи кинематики, в которой a и αα постоянны.
Поворотный Линейный θ=ω¯tθ=ω¯t х=v¯tx=v¯t ω=ω0+αtω=ω0+αt v=v0+atv=v0+at постоянная αα, a θ=ω0t+12αt2θ=ω0t+12αt2 х=v0t+12at2x=v0t+12at2 постоянная αα, a ω2=ω02+2αθω2=ω02+2αθ v2=v02+2axv2=v02+2ax постоянная αα, a Стол 6.
В этих уравнениях ω0ω0 и v0v0 — начальные значения, t0t0 равно нулю, а средняя угловая скорость ω¯ω¯ и средняя скорость v¯v¯ равны
ω¯=ω0+ω2иv¯=v0+v2.ω¯=ω0+ω2иv¯=v0+v2.
6.11
Веселье в физике
Погоня за штормом
Рисунок 6.10 Торнадо спускаются с облаков в виде воронок, которые сильно вращаются. (Дафна Зарас, Национальное управление океанических и атмосферных исследований США)
Охотники за штормами, как правило, попадают в одну из трех групп: любители, преследующие торнадо в качестве хобби, ученые, занимающиеся изучением атмосферы, собирают данные для исследований, наблюдатели за погодой для средств массовой информации или ученые, развлекающиеся под вид работы. Погоня за штормом — опасное времяпрепровождение, потому что торнадо может быстро изменить курс без малейшего предупреждения. Поскольку за разрушениями, оставленными торнадо, следуют охотники за штормами, замена спущенных шин из-за обломков, оставленных на шоссе, является обычным явлением.
Торнадо — прекрасный пример вращательного движения в природе. Они возникают во время сильных гроз, называемых суперячейками, которые имеют столб воздуха, вращающийся вокруг горизонтальной оси, обычно около четырех миль в поперечнике. Разница в скорости ветра между сильными холодными ветрами выше в атмосфере в струйном течении и более слабыми ветрами, движущимися на север от Мексиканского залива, заставляет столб вращающегося воздуха смещаться так, что он вращается вокруг вертикальной оси, создавая торнадо.
Торнадо создают скорость ветра до 500 км/ч (приблизительно 300 миль/ч), особенно внизу, где воронка самая узкая, поскольку скорость вращения увеличивается по мере уменьшения радиуса. Они сдувают дома, как если бы они были сделаны из бумаги, и, как известно, протыкают стволы деревьев кусочками соломы.
Какой физический термин обозначает глаз бури? Почему ветры в эпицентре торнадо слабее, чем на его внешнем краю?
Глаз бури находится в центре вращения. Ветры слабее в глазу торнадо, потому что тангенциальная скорость прямо пропорциональна радиусу кривизны.
Глаз бури – центр вращения. Ветры слабее в глазу торнадо, потому что тангенциальная скорость обратно пропорциональна радиусу кривизны.
Глаз бури находится в центре вращения. Ветры слабее в глазу торнадо, потому что тангенциальная скорость прямо пропорциональна квадрату радиуса кривизны.
Глаз бури – центр вращения.
Крутящий момент
Если вы когда-нибудь крутили велосипедное колесо или толкали карусель, вы знаете, что для изменения угловой скорости необходима сила. Чем дальше сила приложена от точки поворота (или точки опоры), тем больше угловое ускорение. Например, дверь открывается медленно, если вы нажимаете слишком близко к петле, но открывается легко, если вы нажимаете далеко от петли. Кроме того, мы знаем, что чем массивнее дверь, тем медленнее она открывается; это потому, что угловое ускорение обратно пропорционально массе. Эти отношения очень похожи на отношения между силой, массой и ускорением из второго закона Ньютона. Поскольку мы уже рассмотрели угловые версии расстояния, скорости и времени, вы можете задаться вопросом, что такое угловая версия силы и как она соотносится с линейной силой.
Угловой версией силы является крутящий момент ττ, который представляет собой поворачивающую эффективность силы. См. Рисунок 6.11. Уравнение для величины крутящего момента:
τ=rFsinθ,τ=rFsinθ,
, где r — величина плеча рычага, F — величина линейной силы, а θθ — угол между плечом рычага и силой. Плечо рычага — это вектор от точки вращения (точка вращения или точка опоры) к месту приложения силы. Поскольку величина плеча рычага представляет собой расстояние, его единицы измерения — метры, а крутящий момент — Н⋅м. Крутящий момент является векторной величиной и имеет то же направление, что и создаваемое им угловое ускорение.
Рисунок 6.11 Человек толкает карусель за ее край и перпендикулярно плечу рычага для достижения максимального крутящего момента.
Применение большего крутящего момента приведет к большему угловому ускорению. Например, чем сильнее человек толкает карусель на рис.
Поддержка учителей
Поддержка учителей
[BL][OL][AL] Продемонстрируйте физические взаимосвязи между крутящим моментом, силой, углом приложения силы и длиной плеча рычага, используя рычаги разной длины. Помогите учащимся установить связь между физическими наблюдениями и математическими соотношениями. Например, крутящий момент максимален, когда сила приложена точно перпендикулярно плечу рычага, потому что sinθ=1sinθ=1 для θ=90θ=90 градусов.
Решение задач кинематики вращения и крутящего момента
Точно так же, как линейные силы могут уравновешиваться, создавая нулевую результирующую силу и линейное ускорение, то же самое верно и для вращательного движения.
Смотреть физику
Введение в крутящий момент
В этом видео крутящий момент определяется с точки зрения плеча момента (которое совпадает с плечом рычага). Он также охватывает проблему с силами, действующими в противоположных направлениях вокруг точки поворота. (На этом этапе вы можете игнорировать упоминания Сала о работе и механических преимуществах.)
Нажмите, чтобы просмотреть содержимое
Если бы чистый крутящий момент, действующий на линейку из примера, был бы положительным, а не нулевым, что бы это сказало об угловом ускорении? Что произойдет с правителем со временем?
Линейка находится в состоянии вращательного равновесия, поэтому она не будет вращаться вокруг своего центра масс.
Линейка не находится в состоянии вращательного равновесия, поэтому она не будет вращаться вокруг своего центра масс. Таким образом, угловое ускорение будет равно нулю.
Линейка не находится в состоянии вращательного равновесия, поэтому она будет вращаться вокруг своего центра масс. Таким образом, угловое ускорение будет ненулевым.
Линейка находится в состоянии вращательного равновесия, поэтому она будет вращаться вокруг своего центра масс. Таким образом, угловое ускорение будет ненулевым.
Теперь давайте рассмотрим примеры применения вращательной кинематики к рыболовной катушке и концепции крутящего момента к карусели.
Рабочий пример
Расчет времени остановки вращения рыболовной катушки
Глубоководный рыбак использует удочку с катушкой радиусом 4,50 см. Большая рыба берет наживку и уплывает от лодки, вытягивая леску из своей рыболовной катушки. По мере разматывания лески с катушки катушка вращается с угловой скоростью 220 рад/с. Рыбак тормозит спиннинговую катушку, создавая угловое ускорение −300 рад/с 2 . Сколько времени требуется барабану, чтобы остановиться?
Стратегия
Нас просят найти время t для остановки барабана. Величина начальной угловой скорости ω0=220ω0=220 рад/с, а величина конечной угловой скорости ω=0ω=0 . Величина углового ускорения со знаком равна α=−300α=−300 рад/с 2 , где знак минус указывает на то, что оно действует в направлении, противоположном угловой скорости. Глядя на уравнения кинематики вращения, мы видим все величины, кроме t известны в уравнении ω=ω0+αtω=ω0+αt, что делает его самым простым уравнением для решения этой задачи.
Решение
Используемое уравнение ω=ω0+αtω=ω0+αt .
Алгебраически решаем уравнение для t , а затем подставляем известные значения.
t=ω−ω0α=0−220рад/с−300рад/с2=0,733st=ω−ω0α=0−220рад/с−300рад/с2=0,733с
6.12
Обсуждение
катушка довольно мала, потому что ускорение довольно велико. Леска иногда рвется из-за прилагаемой силы, и рыбаки часто дают рыбе немного поплавать, прежде чем затормозить катушку. Усталая рыба будет медленнее, ей потребуется меньшее ускорение и, следовательно, меньшая сила.
Рабочий пример
Расчет крутящего момента на карусели
Рассмотрим человека, толкающего игровую карусель на рис. 6.11. Он прикладывает силу 250 Н на краю карусели и перпендикулярно радиусу, который равен 1,50 м. Какой крутящий момент он выдает? Предположим, что трение, действующее на карусель, пренебрежимо мало.
Стратегия
Чтобы найти крутящий момент, обратите внимание, что приложенная сила перпендикулярна радиусу и что трением можно пренебречь.
Решение
τ=rFsinθ=(1,50м)(250Н)sin(π2).=375Н⋅мτ=rFsinθ=(1,50м)(250Н)sin(π2).=375Н⋅м
6,13
1 Обсуждение
Человек максимизирует крутящий момент, прикладывая силу перпендикулярно плечу рычага, так что θ=π2θ=π2 и sinθ=1sinθ=1 . Мужчина также максимизирует свой крутящий момент, нажимая на внешний край карусели, так что он получает максимально возможное плечо рычага.
Практические задачи
15.
Какой крутящий момент создаст человек, если он приложит силу 12\,\text{N} на расстоянии 1,0\,\text{м} от точки вращения, перпендикулярно плечу рычага?
\frac{1}{144}\,\text{Н-м}
\frac{1}{12}\,\text{Н-м}
12\,\text{Н-м}
144\,\text{Н-м}
16.
Угловая скорость объекта изменяется с 3 рад/с по часовой стрелке до 8 рад/с по часовой стрелке за 5 с. Каково его угловое ускорение?
- 0,6 рад/с 2
- 1,6 рад/с 2
- 1 рад/с 2
- 5 рад/с 2
Проверьте свое понимание
17.
Что такое угловое ускорение?
Угловое ускорение — это скорость изменения углового смещения.
Угловое ускорение – скорость изменения угловой скорости.
Угловое ускорение — это скорость изменения линейного перемещения.
Угловое ускорение — скорость изменения линейной скорости.
18.
Какое уравнение для углового ускорения, α ? Предположим, что θ — это угол, ω — угловая скорость, t — время.
- α=ΔωΔtα=ΔωΔt
- α=ΔωΔtα=ΔωΔt
- α=ΔθΔtα=ΔθΔt
- α=ΔθΔtα=ΔθΔt
19.
Что из следующего лучше всего описывает крутящий момент?
Это вращательный эквивалент силы.
Это сила, влияющая на линейное движение.
Это вращательный эквивалент ускорения.
Именно ускорение влияет на линейное движение.
20.
Какое уравнение для крутящего момента?
\тау = {F\,cos\тета}\,{r}
\тау = \фрак{F\sin\theta}{r}
\тау = rF\!\cos\тета
\тау = rF\!\sin\тета
Поддержка учителей
Поддержка учителей
Используйте вопросы «Проверьте свое понимание», чтобы оценить, справляются ли учащиеся с целями обучения этого раздела.
Вывод уравнения кинематики
Курсы физики в средней школе обычно начинаются с изучения классической механики. В начале курса студенты знакомятся с уравнениями движения, уравнениями кинематики.
Кинематика
Кинематика — это изучение движения объектов без учета сил, вызывающих движение. Эти знакомые уравнения позволяют учащимся анализировать и предсказывать движение объектов, и учащиеся будут продолжать использовать эти уравнения при изучении физики. Четкое понимание этих уравнений и того, как их использовать для решения задач, необходимо для успеха в физике. Эта статья представляет собой чисто математическое упражнение, предназначенное для быстрого обзора того, как уравнения кинематики выводятся с помощью алгебры.
Рисунок 1В этом упражнении используется ссылка на диаграмму на рис.
В этом документе будут использоваться следующие переменные:
v = модуль скорости объекта (метры в секунду, м/с)
v 1 = модуль начальной скорости (метры в секунду, м/с) (в некоторых в текстах это vi или v 0 )
v 2 = величина конечной скорости (метры в секунду, м/с) (в некоторых текстах это v f )
a = величина ускорения (в метрах в секунду в квадрате, м/с 2 )
с = вектор смещения, модуль смещения – расстояние,
с = │ с │ = d (векторы выделены жирным шрифтом; тот же символ, не выделенный жирным шрифтом, представляет собой модуль вектор)
Δ Указывает изменение, например, ΔV = (V 2 –V 1 )
T = начало
T 1 = Начальный момент
T 1 = The Nimal
1111111111111111111111111111111111111111111111111111111111111111111111111111 гг.Как вывести уравнения
Первым шагом будет вычисление наклона диагональной линии. В этом случае, поскольку наклон будет представлять собой изменение скорости (подъем), деленное на изменение времени (бег), наклон будет равен ускорению.
Для простоты перепишите t 2 – t 1 как Δt.
Это Уравнение 1 . Переставьте в уравнении 1 , чтобы получить v 2 в левой части уравнения. Это выражает уравнение в форме пересечения наклона линии, y = mx + b.
Чтобы получить следующее уравнение, выведите выражение для смещения объекта за интервал времени Δt. Смещение объекта, движущегося с постоянной скоростью, можно найти, умножив скорость объекта на время, в течение которого объект движется с этой скоростью.
Однако объект в этом упражнении не движется с постоянной скоростью. Как можно рассчитать расстояние до объекта, который не движется с постоянной скоростью?
Рассмотрим объект, движущийся с постоянной скоростью v 1 , с момента t 1 до t 2 .
Где Δt – временной интервал t 2 – t 1 . Рассмотрим график движения этого объекта, как на рис. 2. рисунок 2
Перемещение объекта на рис. 2 равно v 1 Δt. Произведение v 1 Δt также равно площади A 1 . Точно так же полное перемещение объекта на рис. 1, движущегося с изменяющейся скоростью, можно найти, вычислив площадь под линией за временной интервал Δt. Для некоторых объектов это вычисление может быть немного сложным, но для объекта, изображенного на рис. 1, вычисление площади под линией просто означает вычисление площади прямоугольника A 1 и треугольника A 2 и сложение значений .
Площадь A 1 представляет собой прямоугольник. Длина l равна v 1 . Ширина w равна t 2 – t 1 , (Δt).
Площадь прямоугольника A 1 = l x w
Площадь A 2 представляет собой треугольник с основанием Δt и высотой v 2 – v 1 .
Площадь треугольника A 2 = ½ b x h
Сложение площадей A 2 и A 1 дает полное перемещение объекта за интервал времени.
Замена A 2 и A 1 дает:
Упрощение:
Это Уравнение 2.
Уравнение 1 не включает переменную s. Уравнение 2 не включает переменную a. Остальные уравнения кинематики можно найти, исключив переменные v 2 и Δt. Начальная скорость v 1 по-прежнему присутствует в каждом уравнении, но v 1 часто можно установить равным нулю, если объект начинает движение из состояния покоя.
Написание набора уравнений, в каждом из которых исключена одна или несколько переменных, позволит получить набор уравнений, которые можно использовать в самых разных задачах, в зависимости от предоставленной информации.
Уравнение 3 получается путем исключения v 2 .
Начните с Уравнение 1 .
Применяя некоторую алгебру, левую часть этого уравнения можно сделать похожей на правую часть Уравнения 2 . Все, что делается с одной частью уравнения, должно быть сделано с другой частью уравнения.
Добавьте v 1 с обеих сторон.
Теперь умножьте обе части на (1/2)Δt.
Подстановка левой части уравнения вместо s исключает v 2 и дает:
Уравнение 3.
Уравнение 4 находится путем исключения переменной времени или Δt.
Начните с Уравнение 1 переставить с ускорением слева от знака равенства:
Уравнение 1.
Умножьте левую часть Уравнение 2 на левую часть Умножьте 2 06 0061 Уравнение правая часть уравнения 2 правая часть уравнения 1.
Это означает умножение обеих частей на ускорение, но это позволит сократить Δt в правой части уравнения.
Уравнение 2.
ΔT Отмена, а уравнение упрощает:
Это уравнение часто записывается как:
Уравнение 4.
Вот все четыре стандартных уравнения Kinematics:
.Уравнение 1.
Уравнение 2.
Уравнение 3.
Уравнение 4.
С помощью уравнений кинематики в этих четырех знакомых схемах студенты-физики могут практиковать свое критическое мышление и навыки решения задач по широкому кругу вопросов физики. Вывод уравнений полезен для развития математических навыков, показывая учащимся, как разрабатываются уравнения и формулы, и знакомит их с этими уравнениями, которые будут использоваться на протяжении всего курса. Студенты будут повторно обращаться к уравнениям кинематики, когда будут изучать круговое и вращательное движение, движение снаряда, энергию и импульс.
Ресурсы
Учащиеся могут применять уравнения кинематики при проведении исследований с помощью следующих продуктов:
Магазин Наклонная плоскость Набор Магазин наклонной плоскости с кольцом и диском PullyShop Экономичный цифровой таймер и фотодатчик Алюминиевая тележка для ускоренияМагазин Сила, энергия и движение
Формулы динамических массивов в Excel
Динамические массивы — это самое большое изменение в формулах Excel за последние годы. Может быть, самое большое изменение когда-либо. Это связано с тем, что динамические массивы позволяют легко работать с несколькими значениями одновременно в формуле. В этой статье представлен обзор со множеством ссылок и примеров.
Основным преимуществом динамических массивов является возможность одновременной работы с несколькими значениями в формуле. Это большое обновление и долгожданное изменение. Динамические массивы решают некоторые действительно сложные проблемы в Excel и коренным образом меняют способ проектирования рабочих листов.
Доступность
Динамические массивы и описанные ниже новые функции доступны только в Excel 365 и Excel 2021. В Excel 2019 и более ранних версиях формулы динамических массивов не поддерживаются. Для удобства я буду использовать «Динамический Excel» (Excel 365) и «Устаревший Excel» (2019 г.).или ранее), чтобы различать версии ниже.
Новинка: обучающее видео по формуле динамического массива
Новые функции
В рамках обновления динамического массива Excel теперь включает 8 новых функций, которые напрямую используют динамические массивы для решения задач, которые традиционно трудно решить с помощью обычных формул. Нажмите на ссылки ниже, чтобы просмотреть подробные сведения и примеры для каждой функции:
Функция Назначение ФИЛЬТР Фильтровать данные и возвращать соответствующие записи РЕНДАРРЭЙ Создать массив случайных чисел ПОСЛЕДОВАТЕЛЬНОСТЬ Создать массив последовательных чисел СОРТИРОВКА Диапазон сортировки по столбцу СОРТИРОВКА Сортировка диапазона по другому диапазону или массиву УНИКАЛЬНЫЙ Извлечение уникальных значений из списка или диапазона XLOOKUP Современная замена ВПР КСМАЧ Современная замена функции ПОИСКПОЗ Видео: новые функции динамического массива в Excel (около 3 минут).
Примечания:
- XLOOKUP и XMATCH не входили в исходную группу новых функций динамического массива, но они отлично работают на новом движке динамического массива. XLOOKUP заменяет VLOOKUP и предлагает современный гибкий подход, использующий преимущества массивов. ПОИСКПОЗ – это обновление функции ПОИСКПОЗ, предоставляющее новые возможности для формул ИНДЕКС и ПОИСКПОЗ.
- Функция LET теперь также является частью новых функций динамического массива.
- На подходе новые функции: недавно выпущенные функции и бета-функции.
Пример
Прежде чем мы углубимся в детали, давайте рассмотрим простой пример. Ниже мы используем новую функцию UNIQUE для извлечения уникальных значений из диапазона B5:B15 с помощью одиночной формулы , введенной в E5:
.=UNIQUE(B5:B15) // вернуть уникальные значения в B5:B15Результатом является список пяти уникальных названий городов, которые появляются в E5:E9.
Как и все формулы, UNIQUE автоматически обновляется при изменении данных. Ниже Ванкувер заменил Портленд в строке 11. Результат UNIQUE теперь включает Ванкувер:
Перелив — одна формула, много значений
В Dynamic Excel формулы, которые возвращают несколько значений, будут «перебрасывать» эти значения прямо на лист. . Это сразу будет более логичным для пользователей формул. Это также полностью динамическое поведение — при изменении исходных данных сразу же обновляются полученные результаты.
Прямоугольник, заключающий значения, называется «диапазоном заполнения». Вы заметите, что область разлива имеет специальную подсветку. В приведенном выше примере UNIQUE диапазон разлива — E5:E10.
При изменении данных диапазон разлива будет расширяться или сужаться по мере необходимости. Вы можете увидеть добавление новых значений или исчезновение существующих значений. Таким образом, диапазон распространения — это новый вид динамического диапазона.
В прежней версии Excel, напротив, вы можете увидеть несколько результатов, возвращаемых формулой массива, в строке формул, если вы используете F9проверить формулу. Однако, если формула не введена как формула массива с несколькими ячейками, на листе будет отображаться только одно значение . Такое поведение всегда затрудняло понимание формул массива. Расширение делает формулы массива более интуитивными.
Примечание. Если сброс заблокирован другими данными, вы увидите ошибку #SPILL. Как только вы освободите место для диапазона разлива, формула автоматически прольется.
Видео: Разлив и зона разлива
Ссылка на диапазон разлива
Чтобы указать диапазон разлива, используйте символ решетки (#) после первой ячейки в диапазоне. Например, чтобы сослаться на результаты функции UNIQUE выше, используйте:
.=E5# // ссылка на результаты UNIQUEЭто то же самое, что и ссылка на весь диапазон разлива, и вы увидите этот синтаксис, когда будете писать формулу, которая ссылается на полный диапазон разлива.
Вы можете напрямую передать ссылку на диапазон разливов в другие формулы. Например, чтобы подсчитать количество городов, возвращенных UNIQUE, вы можете использовать:
=COUNTA(E5#) // подсчет уникальных городовПри изменении диапазона разлива формула будет отражать последние данные.
Значительное упрощение
Добавление новых формул динамического массива означает, что некоторые формулы могут быть значительно упрощены. Вот несколько примеров:
- Извлечение и список уникальных значений (до | после)
- Подсчет уникальных значений (до | после)
- Фильтровать и извлекать записи (до | после)
- Извлечение частичных совпадений (до | после)
Сила одного
Одним из наиболее весомых преимуществ подхода “одна формула, много значений” является меньшая зависимость от абсолютных или смешанных ссылок. Поскольку формула динамического массива выводит результаты на лист, ссылки остаются неизменными, но формула генерирует правильные результаты.
Например, ниже мы используем функцию ФИЛЬТР для извлечения записей в группе «А». В ячейку F5 вводится одна формула:
=FILTER(B5:D11,B5:B11="a") // ссылки являются относительнымиОбратите внимание, что оба диапазона являются разблокированными относительными ссылками, но формула работает отлично.
Это огромное преимущество для многих пользователей, поскольку оно значительно упрощает процесс написания формул. Еще один хороший пример см. в таблице умножения ниже.
Объединение функций в цепочки
Вещи становятся действительно интересными, когда вы соединяете вместе более одной функции динамического массива. Возможно, вы хотите отсортировать результаты, возвращаемые UNIQUE? Легкий. Просто оберните функцию SORT вокруг функции UNIQUE следующим образом:
Как и прежде, при изменении исходных данных автоматически появляются новые уникальные результаты, хорошо отсортированные.
Собственное поведение
Важно понимать, что поведение динамического массива является встроенным и глубоко интегрированным в .
Например, в прежней версии Excel, если мы присвоим функции ДЛСТР значение диапазон текстовых значений, мы увидим одиночных результата. В Dynamic Excel, если мы зададим функции ДЛСТР диапазон значений, мы увидим 91 944 нескольких 91 149 результатов. Этот экран ниже показывает старое поведение слева и новое поведение справа:
Это огромное изменение, которое может повлиять на все виды формул. Например, функция ВПР предназначена для извлечения одного значения из таблицы с использованием индекса столбца. Однако в Dynamic Excel, если мы задаем ВПР более одного индекса столбца, используя константу массива, например:
=VLOOKUP("jose",F7:h20,{1,2,3},0)Функция VLOOKUP вернет несколько столбцов:
Другими словами, хотя функция VLOOKUP никогда не предназначалась для возврата нескольких значений, теперь это возможно благодаря новому механизму формул в Dynamic Excel.
Все формулы
Наконец, обратите внимание, что динамические массивы работают со всеми формулами , а не только с функциями. В приведенном ниже примере ячейка C5 содержит одну формулу:
.=B5:B14*C4:L4Результат попадает в диапазон 10 на 10, включающий 100 ячеек:
Если числа в диапазонах B5:B14 и C4:L4 сами являются динамическими массивами (т.е. оператор ссылки можно использовать так:
=B5#*C4# // возвращает тот же массив 10 x 10Массивы становятся популярными
С внедрением динамических массивов слово «массив» будет появляться гораздо чаще. На самом деле вы можете увидеть, что термины “массив” и “диапазон” используются почти как синонимы. Вы увидите массивы в Excel, заключенные в фигурные скобки, например:
{1,2,3} // горизонтальный массив {1;2;3} // вертикальный массивМассив — это термин программирования, который относится к списку элементов, которые появляются в определенном порядке.
Видео: Что такое массив?
Операции с массивами становятся важными
Поскольку динамические формулы Excel могут легко работать с несколькими значениями, операции с массивами станут более важными. Термин «операция с массивом» относится к выражению, которое запускает логическую проверку или математическую операцию над массивом. Например, приведенное ниже выражение проверяет, являются ли значения в B5:B9равны “ca”
=B5:B9="ca" // состояние = "ca", поскольку в ячейке B5:B9 5 ячеек, результатом будет 5 значений ИСТИНА/ЛОЖЬ в массиве:
{ЛОЖЬ; ИСТИНА; ЛОЖЬ; ИСТИНА; ИСТИНА}Приведенная ниже операция с массивом проверяет суммы, превышающие 100:
=C5:C9>100 // количество > 100Последняя операция массива объединяет тест A и тест B в одном выражении:
=(В5:В9="ca")*(C5:C9>100) // состояние = "ca" и количество > 100Примечание.
Чтобы вернуть это к формулам динамического массива в Excel, в приведенном ниже примере показано, как мы можем использовать точно такую же операцию массива внутри функции ФИЛЬТР, что и аргумент include :
ФИЛЬТР возвращает две записи, где состояние = ” ca” и количество > 100.
Демонстрацию см. в разделе Как фильтровать по двум критериям (видео).
Новые и старые формулы массива
В Dynamic Excel нет необходимости вводить формулы массива с помощью клавиш Ctrl + Shift + Enter. При создании формулы Excel проверяет, может ли формула возвращать несколько значений. Если это так, она будет автоматически сохранена как формула динамического массива, но вы не увидите фигурных скобок. В приведенном ниже примере показана типичная формула массива, введенная в Dynamic Excel:
Если вы откроете ту же формулу в прежней версии Excel, вы увидите фигурные скобки:
В другом направлении, когда «традиционная» формула массива открыта в Dynamic Excel, вы увидите фигурные скобки в строке формул.
Однако, если вы повторно введете формулу без изменений, фигурные скобки будут удалены, и формула вернет тот же результат:
.
Суть в том, что формулы массива, введенные с помощью клавиш Ctrl + Shift + Enter (CSE), по-прежнему работают для обеспечения совместимости, но вам не нужно вводить формулы массива с помощью CSE в Dynamic Excel.
Символ @
С введением динамических массивов вы увидите, что символ @ чаще появляется в формулах. Символ @ включает поведение, известное как «неявное пересечение». Неявное пересечение — это логический процесс, в котором многие значения сводятся к одному значению.
В прежних версиях Excel неявное пересечение — это молчаливое поведение, используемое (при необходимости) для сведения нескольких значений к одному результату в одной ячейке. В Dynamic Excel это обычно не требуется, поскольку на лист может попасть несколько результатов.
При открытии электронных таблиц, созданных в более ранней версии Excel, вы можете увидеть, что символ @ автоматически добавляется к существующим формулам, имеющим потенциал , чтобы вернуть много значений. В прежних версиях Excel формула, возвращающая несколько значений, не будет отображаться на листе. Символ @ вызывает такое же поведение в Dynamic Excel, поэтому формула ведет себя так же и возвращает тот же результат, что и в исходной версии Excel.
Другими словами, @ добавляется, чтобы старая формула не выбрасывала несколько результатов на лист. В зависимости от формулы вы можете удалить символ @, и поведение формулы не изменится.
Резюме
- Динамические массивы значительно упрощают написание определенных формул.
- Теперь вы можете легко фильтровать совпадающие данные, сортировать и извлекать уникальные значения с помощью формул.
- Формулы динамического массива можно объединять (вкладывать) для выполнения таких операций, как фильтрация и сортировка.