
2.1: Что такое робототехника?
Робот – это программируемое механической устройство, способное выполнять задачи и взаимодействовать с внешней средой без помощи со стороны человека. Робототехника – это научная и техническая база для проектирования, производства и применения роботов.
Слово «робот» было впервые использовано чешским драматургом Карлом Чапеком в 1921. В его произведении «Универсальные роботы Россума» речь шла о классе рабов, искусственно созданных человекоподобных слуг, сражающихся за свою свободу. Чешское слово «robota» означает «принудительное рабство». Слово «робототехника» было впервые применено известным автором научной фантастики Айзеком Азимовым в 1941 году.
Базовые компоненты робота
Компоненты робота: тело/рама, система управления, манипуляторы, и ходовая часть.
Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом.
Система управления: Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота. Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
Манипуляторы: Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
Ходовая часть:
Возможности применения и примеры роботов
На сегодняшний день, роботы имеют массу применений. Области применения делятся на три основные категории:
- промышленные роботы;
- исследовательские роботы;
- образовательные роботы.
Промышленные роботы
В промышленности, для выполнения огромного количества работ необходимы высокая скорость и точность.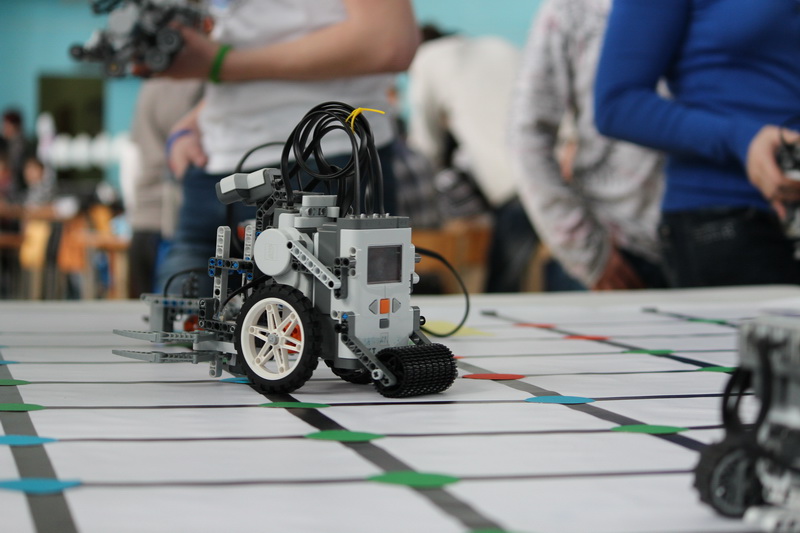 В течение многих лет ответственность за выполнение подобных работ несли люди. С развитием технологий, использование роботов позволило ускорить и повысить точность многих производственных процессов. Это и упаковка, сборка, окраска и укладка на поддоны. Изначально, роботы выполняли только особые виды повторяющихся работ, где требовалось соблюдение простого заданного набора правил. Тем не менее, с развитием технологий промышленные роботы стали гораздо более подвижны, и теперь они способны принимать решения на основе сложного ответа от датчиков. Сегодня промышленные роботы часто оснащены системами технического зрения. К концу 2014 года международная робототехническая федерация прогнозировала объем применения промышленных роботов по всему миру свыше 1,3 миллиона единиц!
В течение многих лет ответственность за выполнение подобных работ несли люди. С развитием технологий, использование роботов позволило ускорить и повысить точность многих производственных процессов. Это и упаковка, сборка, окраска и укладка на поддоны. Изначально, роботы выполняли только особые виды повторяющихся работ, где требовалось соблюдение простого заданного набора правил. Тем не менее, с развитием технологий промышленные роботы стали гораздо более подвижны, и теперь они способны принимать решения на основе сложного ответа от датчиков. Сегодня промышленные роботы часто оснащены системами технического зрения. К концу 2014 года международная робототехническая федерация прогнозировала объем применения промышленных роботов по всему миру свыше 1,3 миллиона единиц!
Роботы могут использоваться для выполнения сложных, опасных задач, а также задач, которые человек выполнить не в состоянии. Например, роботы способны обезвреживать бомбы, обслуживать ядерные реакторы, исследовать глубины океана и достигать самых дальних уголков космоса.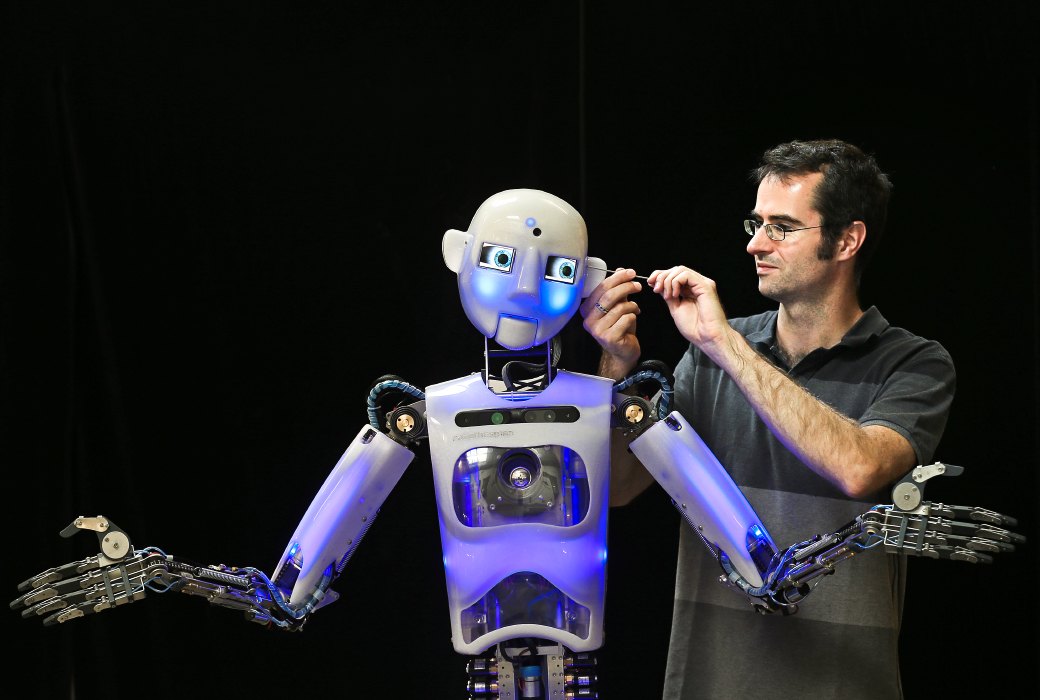
Исследовательские роботы
Роботы имеют широкое применение в мире исследований, так как их часто используют для выполнения задач, в решении которых человек беспомощен. Наиболее опасные и сложные среды находятся под поверхностью Земли. В целях изучения космического пространства и планет солнечной системы в НАСА на протяжении использовались космические аппараты, посадочные модули и вездеходы с функциями роботов.
Роботы Pathfinder и Sojourner
Для марсианской миссии Pathfinder была разработана уникальная технология, позволяющая осуществить доставку оборудованного посадочного модуля и роботизированного вездехода, Sojourner, на поверхность Марса. Sojourner был первым вездеходом, отправленным на планету Марс. Масса вездехода Sojourner на поверхности земли составляет 11 кг (24,3 фунта), на поверхности Марса – прибл. 9 фунтов, а его размеры сопоставимы с размерами детской коляски. Вездеход имеет шесть колес и может перемещаться со скоростью до 0,6 метров (1,9 футов) в минуту.
Вездеходы Spirit и Opportunity
Марсианские исследовательские вездеходы (MER) Spirit и Opportunity были отправлены на Марс летом 2003 года и приземлились в январе 2004 года. Их миссия состояла в исследовании и классификации большого количества камней и почв с целью обнаружения остатков воды на Марсе, в надежде на отправку на планету человеческой миссии. Несмотря на то, что запланированная длительность миссии составляла 90 дней, в действительности она превысила шесть лет. За это время было собрано бесчисленное количество геологических данных о Марсе.
Роботизированная рука космического корабля
Когда проектировщики НАСА впервые приступили к проектированию космического корабля, они столкнулись с задачей, выраженной в необходимости безопасной и эффективной доставки в космическое пространство огромного, но, к счастью, невесомого объема груза и оборудования.
Рука имеет шесть подвижных соединений, имитирующих человеческую руку. Два соединения расположены в плече, одно – в локте, и еще три – в кисти. На конце кисти установлено захватное устройство, способное захватывать или зацеплять требуемый груз. В условиях невесомости рука способна поднимать 586 000 фунтов груза и выполнять их размещение с удивительной аккуратностью. Общая масса руки на поверхности Земли составляет 994 фунта.
RMS использовалась для запуска и поиска спутников, а также оказалась бесценным помощником для астронавтов в процессе ремонта космического телескопа Хаббла. Последняя миссия Канадарм в составе космического корабля стартовала в июле 2011 года и стала девяностой миссией этого робота.
Мобильные обслуживающие системы
Мобильная обслуживающая система (MSS) представляет собой систему, аналогичную RMS, и известна также как Канадарм 2.
Dextre
В рамках космической миссии STS-123 в 2008, космический корабль Endeavor осуществлял перевозку последней части гибкого манипулятора специального назначения Dextre.
Dextre – это робот, оснащенный двумя не большими руками. Робот способен выполнять задачи по точной сборке, которые до этого выполняли астронавты во время входа в открытый космос. Dextre может транспортировать объекты, пользоваться инструментами и осуществлять установку или удаление оборудования на космической станции. Dextre также оснащен освещением, видео-оборудованием, инструментальной базой, а также четырьмя держателями для инструментов. Датчики позволяют роботу «чувствовать» объекты, с которыми он имеет дело, и автоматически реагировать на движения или изменения.
По конструкции робот напоминает человека. Верхняя часть его тела может поворачиваться в талии, а плечи удерживают руки, расположенные с двух сторон.
Роботы в образовании
Робототехника стала увлекательным и доступным инструментом обучения и поддержки STEM, проектирования и подходов к решению задач. В робототехнике, учащиеся получают возможность реализовать себя в роли проектировщиков, артистов и техников одновременно, используя собственные руки и голову. За счет этого открываются огромные возможности применения научных и математических основ.
В современной системе образования, с учетом финансовых ограничений, средние и высшие школы находятся в постоянном поиске экономически выгодных путей преподавания сложных программ, сочетающих технологии с множеством дисциплин, учащимся для их подготовки к профессиональной деятельности. Преподаватели сразу видят преимущества робототехники и данного учебного курса, так как в них реализован межпредметный метод сочетания различных дисциплин. В дополнение, робототехника предлагает наиболее доступное и подходяще для повторного использования оборудование.
В дополнение, робототехника предлагает наиболее доступное и подходяще для повторного использования оборудование.
Сегодня более чем когда либо, школы применяют робототехнические программы в классе для “оживления” учебных курсов и обеспечения соответствия широкому спектру академических стандартов, необходимых для учащихся. Робототехника не только является уникальной и широкой базой для преподавания разнообразных технических дисциплин, но также областью техники, оказывающей значительное влияние на развитие современного общества.
Почему робототехника важна?
Как видно из раздела «Возможности применения и примеры роботов», робототехника является новой областью техники, применяемой во многих сферах жизни человека. Важным фактором развития общества является образованность всех его членов в части существующих технологий. Но это не единственная причина возрастающей значимости робототехники. Робототехника уникальным образом сочетает в себе основы дисциплин STEM (естественные науки, технологии, инженерия и математика).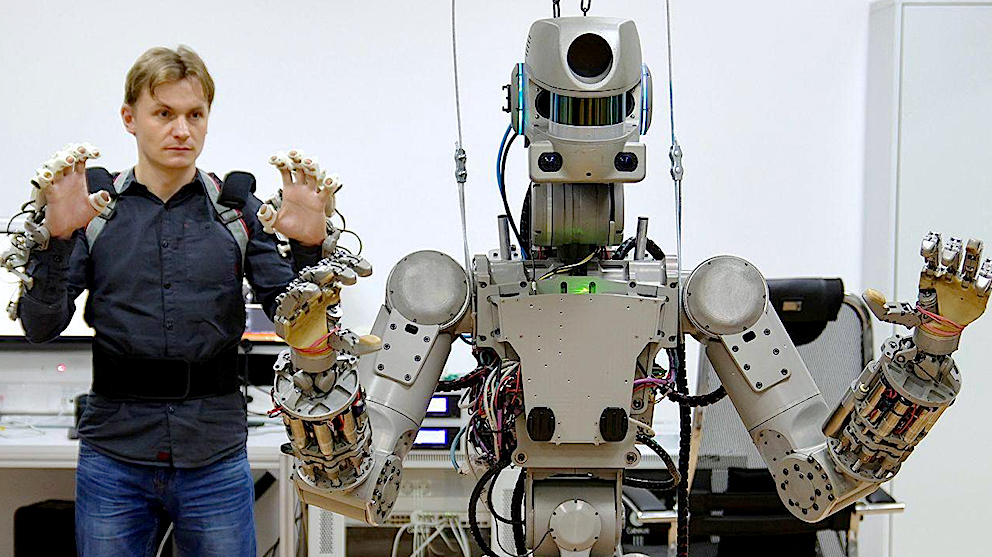 В процессе обучения в классе учащиеся изучают различные дисциплины и их взаимосвязи, используя современные, технологичные и увлекательные инструменты. Помимо этого, визуальное представление проектов, которое требуется от учащи, стимулирует их к экспериментам и проявлению изобретательности в процессе поиска эстетичных и работоспособных решений. Комбинируя эти аспекты работы, учащиеся поднимают свои знания и возможности на новый уровень.
В процессе обучения в классе учащиеся изучают различные дисциплины и их взаимосвязи, используя современные, технологичные и увлекательные инструменты. Помимо этого, визуальное представление проектов, которое требуется от учащи, стимулирует их к экспериментам и проявлению изобретательности в процессе поиска эстетичных и работоспособных решений. Комбинируя эти аспекты работы, учащиеся поднимают свои знания и возможности на новый уровень.
Робототехника – история развития данной области машиностроения
1. Определение
Робототехника – отрасль машиностроения, занимающееся разработкой, созданием, эксплуатацией машин и устройств, запрограммированных на самостоятельное выполнение конкретных задач.
В зависимости от целей и области применения различают различные виды робототехники: космическая, бытовая, промышленная, медицинская и т.д.
2. Узнайте больше о решениях в области робототехники
Для того, чтобы ознакомиться с решениями в области робототехники от ведущих российских поставщиков – свяжитесь с нами по номеру 8 (921) 781 24-49 – звонок, Telegram, Whatsapp или оставьте короткую заявку по ссылке.
3. История создания и развития
Первые механические устройства, которые можно назвать родоначальниками роботов создавались еще в Древнем мире (летающий деревянный голубь, жестикулирующая статуя и т.д.). Однако действительно выдающиеся достижения в робототехнике были достигнуты в 20-м веке. Первые роботы в современном понимании были созданы 1950-х годах, когда Д. Девол и Д. Энглбергер представили первого программируемого робота, выполняющего сложные задачи на сборочной линии в General Motors.
В 1987 году была создана Международная федерация робототехники для содействия в проведениях исследований и разработок в области робототехники по всему миру. В 2000 году японская компания Honda представила миру первого человекоподобного робота-андроида ASIMO. Новым направлением в развитии робототехнике является разработка нанороботов, чьи размеры близки к размерам молекул.
Сегодня понятие робототехники близко к понятиям искусственный интеллект, машинное обучение.
Термин «робототехника» впервые был упомянут американским писателем А. Азимовым в 1941 году в научно-фантастическом рассказе «Лжец», повествующем о проблемах позитронных роботов. Азимов также предложил знаменитые три закона робототехники. А само слово «робот» придумал чешский писатель К. Чапек в 1920 году.
4. Технические характеристики
При создании робота важно понимать конкретные для данного робота задачи, от которых зависит наличие у робота тех или иных составляющих. Два основных вида роботов: манипуляторы (стационарные) и мобильные роботы. Например, для передвижения по труднопроходимой местности мобильные роботы используют гусеницы, крылья, для более ровной поверхности – колеса или ноги.
В качестве источников питания самым популярным решением на сегодняшний день является использование аккумуляторов и различных типов батарей, но существуют роботы с двигателем внутреннего сгорания, солнечными батареями или с использованием ядерных реакций.
В качестве актуаторов используют электродвигатели, линейные приводы, пьезоэлектрические двигатели, пневмонические или гидравлические двигатели.
Для определения себя в пространстве и взаимодействия с человеком и окружающим миром роботы оборудованы разнообразными датчиками, устройствами, распознающими и синтезирующими речь, некоторые человекоподобные роботы способны воспроизводить эмоции.
Писать программное обеспечение для роботов можно на любом современном языке программирования (C++, Java, Python и др.), но существуют и специализированные языки для робототехники: GRL, RAPS, Golog, ALisp, Robotics Toolbox для MATLAB. Выбор зависит только от предпочтений разработчика и характеристик аппаратной части.
Операционные системы для роботов: ROS (Robot Operating System), uPoint MRC (Multi-Robot Control), iRobot, Microsoft RDS.
5. Кейсы применения
Робототехника встречается во всех сферах жизни общества: медицина, сельское хозяйство, военное дело, авиация и др.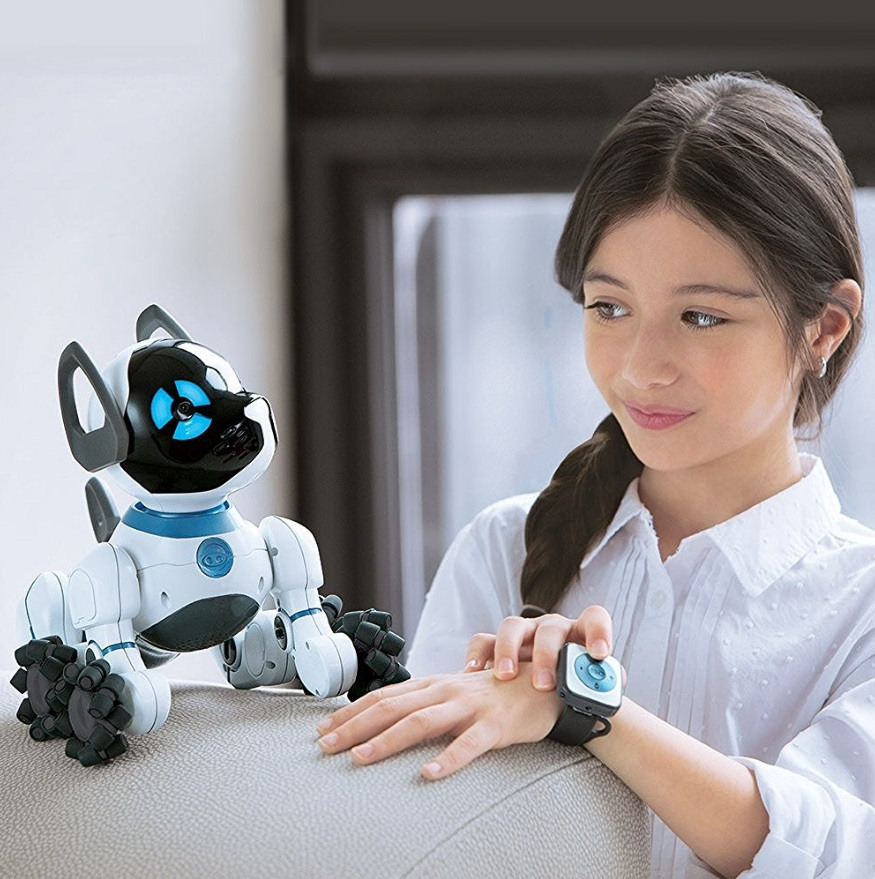 В промышленности используют роботов при сборке станков, автомобилей, производственных машин, для быстрой упаковки/распаковки объектов, для пайки электронных компонентов и другое.
В промышленности используют роботов при сборке станков, автомобилей, производственных машин, для быстрой упаковки/распаковки объектов, для пайки электронных компонентов и другое.
В настоящее время довольно популярна разработка роботизированной хирургической машины для проведения сложнейших операций или операций в тех регионах, где отсутствуют квалифицированные специалисты-врачи.
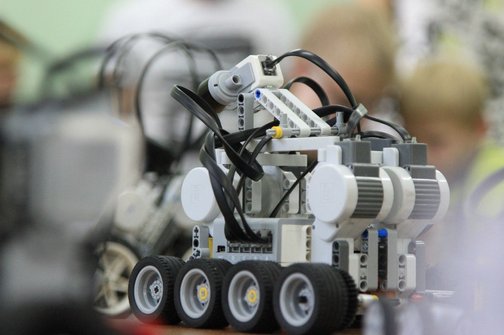
Также робототехника широко распространена как предмет развлечения и домашней автоматизации, примером этому служат роботы собаки (Aibo, Pleo), гиды в музеях, няни, пылесосы (Roomba), газонокосилки и т.д. Для детей компания LEGO выпускает наборы для самостоятельного создания робота.
6. Полезные ссылки
Источники:
- http://www.livescience.com/topics/robots
- https://www.technologyreview.com/s/545056/5-robot-trends-to-watch-for-in-2016/
-
http://www.
 robotshop.com
robotshop.com
 robotshop.com
robotshop.comРобот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот три закона робототехники андроид механический манипулятор промышленный робот
Просмотреть весь связанный контент →
Резюме
Прочтите краткий обзор этой темы
робот , любая автоматическая машина, которая заменяет человеческие усилия, хотя она может не напоминать человека по внешнему виду или выполнять функции, как человек. В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат ), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека « R. U.R.». (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
U.R.». (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статьеСлово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленном применении, см. артикул автоматика.
Викторина “Британника”
Гаджеты и технологии: правда или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? От компьютерных клавиатур до флэш-памяти — узнайте о гаджетах и технологиях в этой викторине.
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидными, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.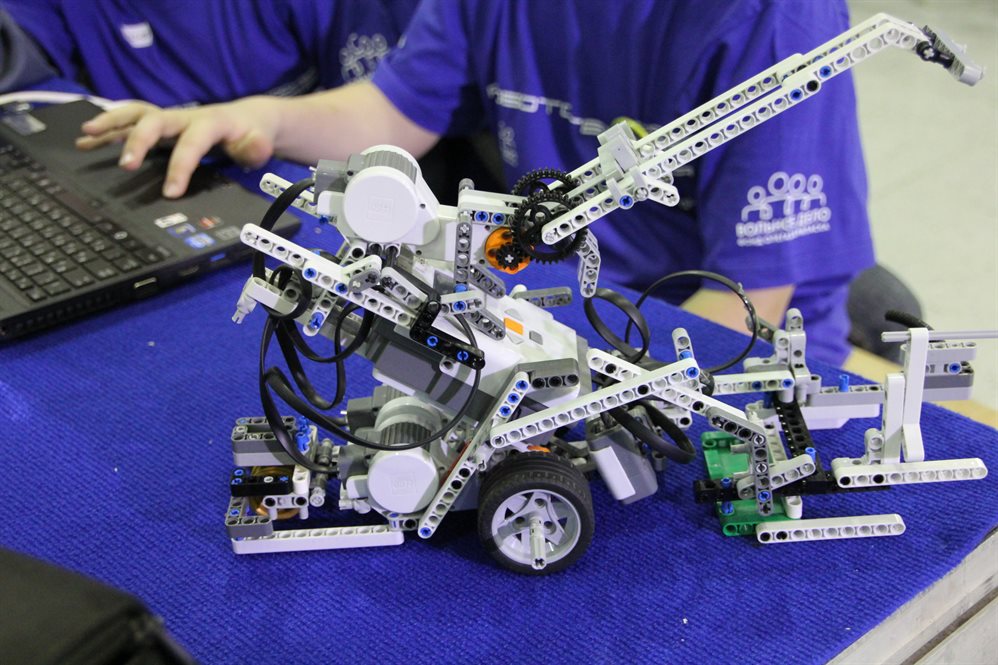
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.0003
единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.0003
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисе и дома). С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
Все роботы – РОБОТЫ: ваш путеводитель по миру робототехники
All Robots – ROBOTS: Your Guide to the World of Robotics- All Robots
- Sort Robots
- Robot Rankings
Perseverance
Aibo
KOOV
TIAGo
Kamigami
Lola
Charlie
Kilobot
RoboThespian
VGo
AILA
Darwin-OP
Ekso
Ручная система
9 PR2
30023 Nao
Rollin’ Justin
Pleo
BigDog
Paro
Roomba
RHex
PackBot
Da Vinci
Genghis
Cassie
iCub
Meca500
Baxter
Geminoid DK
Jaco
Привод
Curiosity
Самоуправляемый автомобиль Google
Albert Hubo
Keepon
Asimo
ACM-R5H
Adaptive Gripper
Aibo (1999)
AirBurr
AlphaDog
Anafi
Anki Drive
ANYmal
Aqua2
Aquanaut
AR-600
ARM
Armar
Atlas
Atlas (2013 )
AutomAtronics
AVA
BALLIP
BANDIT
Луч
BEAR
BHR-5
BOSS
BOTVAC
3
BOSS
BOTVAC
29
BOTVAC
29
. 0023
0023Bruno
Care-O-bot 4
CB2
Chaos
CHARLI
Chico
Cobalt
Cody
Cog
Colossus
COMAN
Cubelets
Daisy
DASH
Dash and Dot
Diego-san
Digit
Double
DRC-Hubo+
Dreamer
EASE
eBee
ECCE
Elios
Emiew 3
EMYS
Erica
Expliner
Explorer Snake-arm Robot
Fable
Fetch
FLASH
Flipperbot
Flobi
Freight
FROG
Furby
Geminoid F
Geminoid HI
Global Hawk
Guardian GT
Guardian S
HAL
Ручка
Harvey
Herb
HEXA
HRP-2
0023HRP-4C
HRP-5P
Hubo 2
Human Support Robot
Husky
HyQ
i-Limb
iBot 4000
Jibo
K5
Kaspar
KHR-3
Kibo
Kismet
Kiwi
Kobian
Kobra
Kojiro
Kuri
Laikago
LAURON V
LBR iiwa
LD
Lego Boost
Lego Mindstorms EV3
Lego Mindstorms NXT
Lego WeDo 2.
