
Помощь студентам в учёбе от Людмилы Фирмаль
Здравствуйте!
Я, Людмила Анатольевна Фирмаль, бывший преподаватель математического факультета Дальневосточного государственного физико-технического института со стажем работы более 17 лет. На данный момент занимаюсь онлайн обучением и помощью по любыми предметам. У меня своя команда грамотных, сильных бывших преподавателей ВУЗов. Мы справимся с любой поставленной перед нами работой технического и гуманитарного плана. И не важно: она по объёму на две формулы или огромная сложно структурированная на 125 страниц! Нам по силам всё, поэтому не стесняйтесь, присылайте.
Срок выполнения разный: возможно онлайн (сразу пишите и сразу помогаю), а если у Вас что-то сложное – то от двух до пяти дней.
Для качественного оформления работы обязательно нужны методические указания и, желательно, лекции. Также я провожу онлайн-занятия и занятия в аудитории для студентов, чтобы дать им более качественные знания.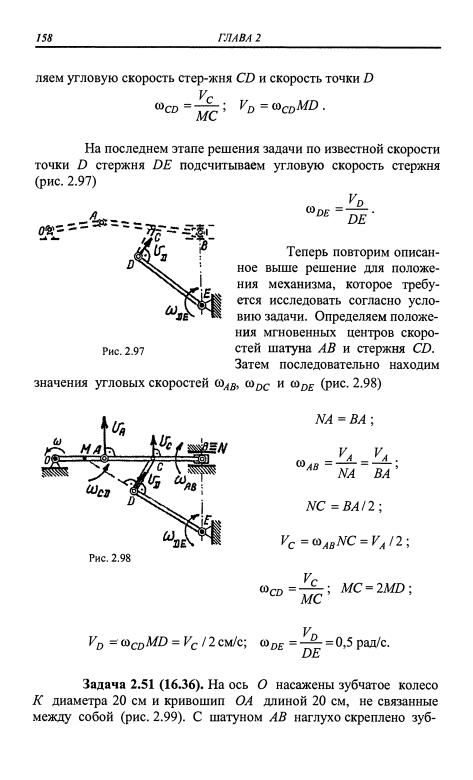
Моё видео:
Как вы работаете?
Вам нужно написать сообщение в WhatsApp . После этого я оценю Ваш заказ и укажу срок выполнения. Если условия Вас устроят, Вы оплатите, и преподаватель, который ответственен за заказ, начнёт выполнение и в согласованный срок или, возможно, раньше срока Вы получите файл заказа в личные сообщения.
Сколько может стоить заказ?Стоимость заказа зависит от задания и требований Вашего учебного заведения. На цену влияют: сложность, количество заданий и срок выполнения. Поэтому для оценки стоимости заказа максимально качественно сфотографируйте или пришлите файл задания, при необходимости загружайте поясняющие фотографии лекций, файлы методичек, указывайте свой вариант.
Минимальный срок выполнения заказа составляет 2-4 дня, но помните, срочные задания оцениваются дороже.
Как оплатить заказ?Сначала пришлите задание, я оценю, после вышлю Вам форму оплаты, в которой можно оплатить с баланса мобильного телефона, картой Visa и MasterCard, apple pay, google pay.
Какие гарантии и вы исправляете ошибки?В течение 1 года с момента получения Вами заказа действует гарантия. В течении 1 года я и моя команда исправим любые ошибки в заказе.
Качественно сфотографируйте задание, или если у вас файлы, то прикрепите методички, лекции, примеры решения, и в сообщении напишите дополнительные пояснения, для того, чтобы я сразу поняла, что требуется и не уточняла у вас. Присланное качественное задание моментально изучается и оценивается.
Теперь напишите мне в Whatsapp или почту и прикрепите задания, методички и лекции с примерами решения, и укажите сроки выполнения. Я и моя команда изучим внимательно задание и сообщим цену.
Я и моя команда изучим внимательно задание и сообщим цену.
Если цена Вас устроит, то я вышлю Вам форму оплаты, в которой можно оплатить с баланса мобильного телефона, картой Visa и MasterCard, apple pay, google pay.
Мы приступим к выполнению, соблюдая указанные сроки и требования. 80% заказов сдаются раньше срока.
После выполнения отправлю Вам заказ в чат, если у Вас будут вопросы по заказу – подробно объясню. Гарантия 1 год. В течении 1 года я и моя команда исправим любые ошибки в заказе.
Можете смело обращаться к нам, мы вас не подведем. Ошибки бывают у всех, мы готовы дорабатывать бесплатно и в сжатые сроки, а если у вас появятся вопросы, готовы на них ответить.
В заключение хочу сказать: если Вы выберете меня для помощи на учебно-образовательном пути, у вас останутся только приятные впечатления от работы и от полученного результата!
Жду ваших заказов!
С уважением
Пользовательское соглашение
Политика конфиденциальности
Пример решения задачи по прикладной механике
Ниже приведены условие и решение задачи. Закачка решения в формате doc начнется автоматически через 10 секунд.
Задача 3 (вар 918).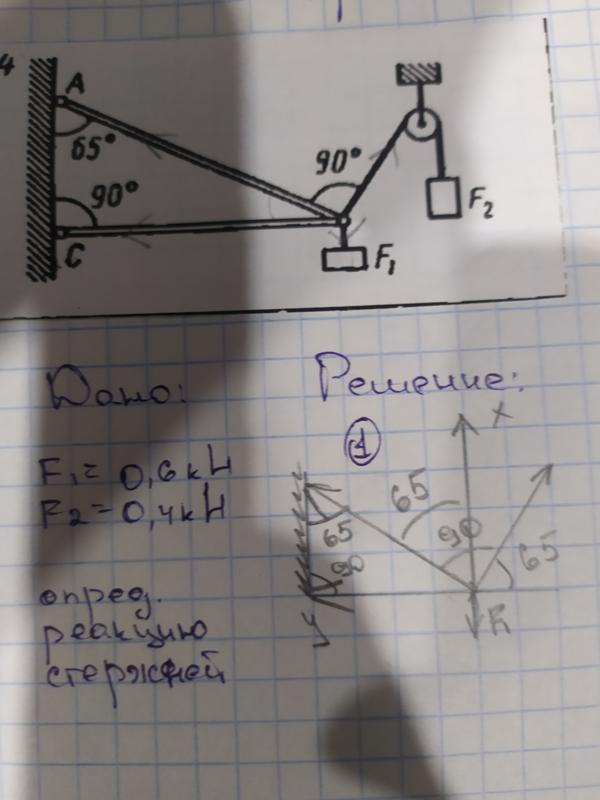
Для заданных балок (рис 3) требуется :
1) записать уравнения для вычисления поперечной силы Q и изгибающего момента М на каждом участке балок в общем виде и построить эпюры Q и М ;
2) для балки (схема «а») рассчитать диаметр круглого поперечного сечения, если материал балки древесина с [σ]=10 МПа ;
3) для балки (схема «б») подобрать поперечное сечение в двух вариантах : двутавровое и прямоугольное с соотношением сторон h/b=2, принять материал балки сталь Ст3 с [σ]=160 МПа ;
4) для балки (схема «б») определить, какое из подобранных сечений более рационально по расходу материала.
Дано : рис. 8 ; a=1.1 м ; b=2.8 м ; c=0.9 м ; d=2 м ; M=9 кН·м ; F=10 кН ; q=8 кН/м.
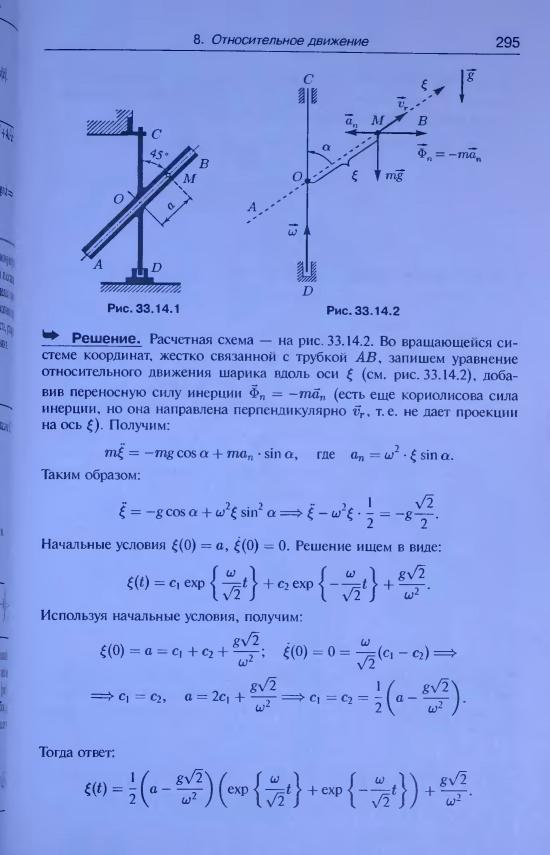
Решение.
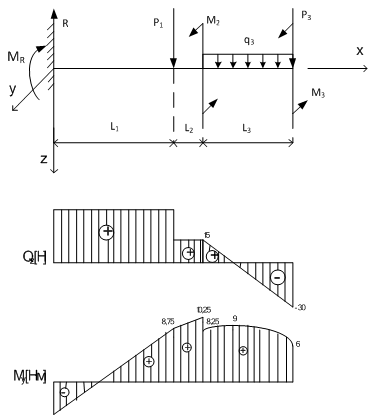
Эпюры поперечных сил и изгибающих моментов строим методом сечений. Определим выражения для поперечных сил и изгибающих моментов на каждом из участков балки. Балка имеет три участка. Обозначим z – расстояние от правого конца балки до некоторого сечения.
Балка имеет три участка. Обозначим z – расстояние от правого конца балки до некоторого сечения.
На участке AB : 0≤z1≤c
Q1=qz1 ; M1=-0.5qz12
На участке BC : c≤z2≤c+b
Q2=qc ; M2=-qc(z2-0.5c)
На участке CD : c+b≤z3≤c+b+a
Q3=qc-F ; M3=F(z3-b-c)-qc(z3-0.5c)
Вычислим поперечные силы и изгибающие моменты в характерных сечениях балки.
На участке AB : при z1=0 ; QA=0 ; MA=0
при z1=c ; QпрB=qc=8×0.9=7.2 кН ; MпрB=-0.5qc2=-0.5×8×0.92= -3.24 кН·м.
На участке BC : при z2=c ; QлB=qc=8×0.9=7.7 кН ;
MлB=-0.5qc2=-0.5×8×0.92= -3.24 кН·м
при z2=c+b ; QпрC=qc=8×0.9=7.2 кН ;
MпрС=-qc(b+0.5c)=-8×0.9×(2.8+0.5×0.9)=-23.4 кН·м.
На участке CD : при z3=c+b ; QлC=qc-F=8×0.9-10=-2.8 кН ;
MлС=-qc(b+0.5c)=-8×0.9×(2.8+0.5×0.9)=-23.4 кН·м
при z3=c+b+a ; QD=qc-F=8×0. 9-10=-2.8 кН ;
9-10=-2.8 кН ;
MD=Fa-qc(a+b+0.5c)=10×1.1-8×0.9×(1.1+2.8+0.5×0.9)=-20.32 кН·м
На участке АB эпюра Q изменяется по линейному закону (её эпюра представляет собой наклонную линию), а эпюра М ограничена параболой, которая не имеет экстремума, так как эпюра Q не меняет свой знак на этом участке. Так как, в данной задаче нас интересуют только максимальные значения в пределах участков (по абсолютной величине), то для построения эпюры на участке АB достаточно двух точек. (Наибольшим будет одно из граничных значений).
По полученным данным строим эпюры Q и М. Для этого отложим перпендикулярно к оси абсцисс в удобном для пользовании масштабе вычисленные значения Q и М для граничных сечений участков и соединим концы полученных ординат линиями, соответствующими законам изменения Q и М. При этом положительные ординаты эпюры Q будем откладывать вверх, а отрицательные – вниз от оси абсцисс ; ординаты же эпюры М будем откладывать со стороны растянутых волокон.
Подберём размеры круглого сечения методом допускаемого напряжения, т. е. в рассмотрение следует принимать лишь сечение балки, в котором действует наибольший по абсолютной величине изгибающий момент. Помощь на экзамене онлайн. В нашем примере опасным является сечение C, в котором Mmax=23.4 кН·м.
е. в рассмотрение следует принимать лишь сечение балки, в котором действует наибольший по абсолютной величине изгибающий момент. Помощь на экзамене онлайн. В нашем примере опасным является сечение C, в котором Mmax=23.4 кН·м.
Круглое сечение деревянной балки подбираем из условия прочности при допускаемом напряжении [σ]=10 МПа :
σ=Mmax/Wx=[σ]
Откуда находим требуемый момент сопротивления сечения балки при изгибе :
Wx=23.4×103/(10×106)=2340×10-6 м3=2340 см3
Момент сопротивления круглого сечения относительно нейтральной оси X имеет вид :
Wx=0.1d3
Тогда d==28.6 см. Принимаем d=30 см.
б) Схема «б»
Для определения опорных реакций воспользуемся уравнениями статики.
ΣmD=0 ; -M-RA(a+b+c)-0.5qd2+qa(0.5a+b+c)=0 , откуда
RA=
=2.6 кН
ΣmA=0 ; -M-0.5qa2+RD(a+b+c)-qd(0.5d+a+b+c)=0 , откуда
RD=
==22. 2 кН.
2 кН.
Сделаем проверку. Для этого составим уравнение проекций сил на вертикальную ось.
ΣY=RA-qa-qd+RD=2.6+22.2-8×(1.1+2)=0
Реакции вычислены, верно. Горизонтальная составляющая реакции в опоре A равна нулю и на рисунке не показана.
Балка имеет четыре участка. Запишем выражения для поперечных сил и изгибающих моментов на каждом из участков.
Участок AB (ход слева) ; 0≤z1≤a ; Q1=RA-qz1 ; M1=RAz1-0.5qz12
Участок BC (ход слева) ; a≤z2≤a+b ; Q2=RA-qa ; M2=RAz2-qa(z2-0.5a)
Участок СD (ход справа) ; d≤z3≤c+d ; Q3=-RD+qd ; M3=RD(z3-d)-qd(z3-0.5d)
Участок DE (ход справа) ; 0≤z4≤d ; Q4=qz4 ; M4=-0.5qz42
Определим значения Qy и Мx в характерных точках балки.
Участок AB : z1=0 ; QA=RA=2.6 кН ; MA=0
z1=a ; QлB=RA-qa=2.6-8×1.1=-6.2 кН ;
MлB=RAa-0.5qa2=2.6×1.1-0.5×8×1.12=-1.98 кН·м
Участок BC : z2=a ; QпрB=RA-qa=2. 6-8×1.1=-6.2 кН ;
6-8×1.1=-6.2 кН ;
MпрB=RAa-0.5qa2=2.6×1.1-0.5×8×1.12=-1.98 кН·м
z2=a+b ; QлC=RA-qa=2.6-8×1.1=-6.2 кН ;
MлC=RA(a+b)-qa(b+0.5a)=2.6×(1.1+2.8)-8×1.1×(2.8+0.5×1.1)=-19.34 кН·м
Участок CD : z3=с+d ; QпрC=-RD+qd=-22.2+8×2=-6.2 кН ;
MпрC= RDc-qd(c+0.5d)=22.2×0.9-8×2×(0.9+0.5×2)=-10.42 кН·м
z3=d ; QлD=-RD+qd= -22.2+8×2=-6.2 кН ;
MлD=-0.5qd2=-0.5×8×22=-16 кН·м.
Участок DE : z4=d ; QпрD=qd=8×2=16 кН ;
MпрD=-0.5qd2=-0.5×8×22=-16 кН·м.
z4=0 ; QE=0 ; ME=0
На участках AB и DE эпюра М ограничена параболой, которая имеет экстремум на участке AB, так как поперечная сила меняет знак на этом участке.
Определим абсциссу сечения, в котором действует экстремальный момент из условия :
Q1=RA-qz0=0 ; z0=RA/q=2. 6/8=0.3 м
6/8=0.3 м
Значение экстремального момента :
Mэкс=RAz0-0.5qz02=2.6×0.3-0.5×8×0.32=0.42 кН·м
По результатам расчета строим эпюры Q и М. В той же последовательности, что и для консольной балки.
Номер двутавра для балки подбираем из условия прочности при изгибе и допускаемом напряжении [σ]=160 МПа.
σ=Mmax/Wx=[σ]
В нашем случае Mmax=19.34 кН·м
Требуемый момент сопротивления Wx=19.34×103/(160×106)=121×10-6 м3=121 см3
По сортаменту (ГОСТ 8239-72) выбираем двутавр № 18 с Wx=143 см3 и площадью сечения 23.4 см2.
Момент сопротивления прямоугольного сечения относительно нейтральной оси X имеет вид :
Wx=. Учитывая отношение h=2b, запишем : Wx=
Тогда b==5.7 см ; h=2×5.7=11.4 см. Площадь прямоугольного сечения :
A=5.7×11.4=65 см2
Так как площадь сечения двутавровой балки меньше сечения прямоугольной балки, то расход материала для двутавровой балки – меньше. Поэтому двутавровая балка более рациональна по сравнению с прямоугольной балкой, по расходу материала.
Поэтому двутавровая балка более рациональна по сравнению с прямоугольной балкой, по расходу материала.
решение 📝 задач в электронном, письменном, онлайн форматах
Студентам технических специальностей нередко нужна помощь в такой дисциплине, как прикладная механика. Решение задач требует сложных инженерных расчетов и точного анализа прочности конструкций. И хотя многие конкретные решения задач (по деталям машин, составление уравнений равновесия и т.д.) даются студентам-технарям довольно легко, без ошибок выполнить полностью всю контрольную работу мало кому удается. Одинаково хорошо разбираться во всех методах, применяемых для решения задач прикладной механики невозможно, поэтому так часто студенты ищут специалистов, профессионально разбирающихся в том или ином разделе дисциплины (методе конечных элементов, методе конечных разностей, др.).
Не стоит сбрасывать со счетов и еще один фактор: в таком предмете, как техническая механика решение задач часто требует построения чертежей. В поиске профессиональной помощи в решении задач по деталям машин студенты стараются выйти на специалистов достаточного уровня, не запрашивающих за свои услуги запредельных сумм. Это сложно, так как большинство сайтов являются посредниками, что не может не сказаться на цене.
В поиске профессиональной помощи в решении задач по деталям машин студенты стараются выйти на специалистов достаточного уровня, не запрашивающих за свои услуги запредельных сумм. Это сложно, так как большинство сайтов являются посредниками, что не может не сказаться на цене.
Решение задач по деталям машин
Тем, кто ищет профессионала в сфере такой дисциплины, как прикладная механика (решение задач, онлайн помощь на экзамене, выполнение чертежей или написание курсовой), поможет ресурс для студентов «ВсёСдал!». Это сайт, на котором онлайн заявки на решение задач прикладной механики не попадают в руки так называемых «менеджеров», чья работа заключается исключительно в передаче задания непосредственному исполнителю. На «ВсёСдал!» заявки автоматически рассылаются всем авторам нужного профиля, после чего исполнители общаются с заказчиком напрямую. Студент может обсудить условия и цены с несколькими специалистами и подобрать для себя подходящий вариант. Прямой диалог позволяет получить и дополнительную консультацию (как сдать экзамен по математике, подготовить презентацию, составить резюме для реферата и т. д.). Отсутствие посредников гарантирует заказчикам адекватные цены, а исполнителям – достойную оплату их труда.
д.). Отсутствие посредников гарантирует заказчикам адекватные цены, а исполнителям – достойную оплату их труда.
Годовой курс «Механика управляемых систем» – общий для студентов 4 курса отделения механики. Он был создан Я.Н. Ройтенбергом и впоследствии модифицирован В.В. Александровым и Н.А. Парусниковым. Предмет курса – современные методы анализа и синтеза управления движением механических систем. По курсу проводятся семинарские занятия.
Александров В.В., Лемак С.С. Парусников Н.А. Лекции по механике управляемых систем. Издание 2020 года.
Программа курса «Механика управляемых систем»
1-й семестр
- Математическая модель управляемой системы. Программное управление и управление с обратной связью. Соответствие математической и физической моделей.
- Теоремы Ляпунова об устойчивости и неустойчивости по первому приближению. Критерий Гурвица (без доказательства). Запас устойчивости.
- Управляемость.
 Критерий управляемости для стационарных управляемых систем.
Критерий управляемости для стационарных управляемых систем. - Наблюдаемость. Критерий наблюдаемости стационарных систем.
- Теорема о стабилизации вполне управляемой системы с известным вектором состояния при помощи обратных связей.
- Асимптотически устойчивый алгоритм оценивания во вполне наблюдаемой стационарной линейной системе.
- Стабилизация по оценке и асимптотическая устойчивость замкнутой системы.
- Декомпозиция по управлению. Инвариантные управляемые подпространства.
- Декомпозиция по наблюдению. Инвариантные ненаблюдаемые подпространства.
- Стабилизация стационарной не вполне управляемой и не вполне наблюдаемой системы.
- Понятие корреляции. Матрица ковариации. Многомерный нормальный закон распределения.
- Решение переопределенных систем линейных алгебраических уравнений. Вероятностная интерпретация метода наименьших квадратов.
- Задача построения оценки x по известным µx, µz, Pxx, Pxz, Pzz и измерению z.
 Минимум дисперсии и критерий ортогональности. Интерпретация оценки как условного среднего.
Минимум дисперсии и критерий ортогональности. Интерпретация оценки как условного среднего. - Процесс с ортогональными приращениями. Понятие белого шума.
- Стохастические модели непрерывных и дискретных динамических систем. Дисперсионные уравнения.
- Дискретный фильтр Калмана.
- Непрерывный фильтр Калмана.
- Условия устойчивости фильтра Калмана. Стационарный фильтр Калмана при бесконечном времени наблюдения.
- Применение теории наблюдаемости и оценивания к задаче инерциальной навигации. Коррекция ИНС при помощи информации доставляемой спутниковыми навигационными системами.
2-й семестр
- Формулировка принципа максимума Понтрягина для оптимизации прихода на многообразие.
- Формула приращения функционала в задаче оптимизации с фиксированным временем.
- Классическая вариация и необходимое условие слабого локального минимума.
- Задача Больца в вариационном исчислении, уравнения Эйлера.
 Лагранжева форма условий оптимальности ПМП. Связь с вариационными принципами механики.
Лагранжева форма условий оптимальности ПМП. Связь с вариационными принципами механики. - Оптимальная стабилизация линейных систем при неограниченных ресурсах управления. Оценка сверху для решений системы.
- Квадратичная стабилизация и линейные матричные неравенства. Лемма Ляпунова и неравенство Ляпунова. Оценка сверху для критерия качества.
- Робастная квадратичная стабилизация. Стабилизация при наличии аддитивных возмущений.
- Стабилизация линейной стохастической системы. Совместная задача управления и оценивания. Теорема разделения.
- Игольчатая вариация и необходимое условие сильного локального минимума. Задача быстродействия. Достаточность принципа максимума для линейных вполне управляемых систем.
- Регулярный синтез по Болтянскому (n=2).
- Метод динамического программирования как достаточное условие оптимальности.
- Применение принципа оптимальности Беллмана в задаче о линейном регуляторе с квадратичным критерием качества.

- Вариация Келли и необходимое условие оптимальности для особых экстремалей Понтрягина. Скобки Пуассона.
- Задача о подъеме ракеты на максимальную высоту.
- Обобщенное необходимое условие оптимальности особых экстремалей и структура оптимального управления.
- Двухуровневое управление сингулярно возмущенной системой.
- Управление планированием тяжелого летательного аппарата.
- Максиминное тестирование точности стабилизации управляемой системы.
Литература
- Ройтенберг Я.Н. Автоматическое управление. М. Наука, 1971, 1978, 1992.
- Александров В.В., Болтянский В.Г., Лемак С.С., Парусников Н.А., Тихомиров В.М. Оптимизация динамики управляемых систем. М. Изд-во МГУ, 2000.
- Новожилов И.В. Фракционный анализ. М. Изд-во МГУ, 1995.
- Парусников Н.А., Морозов В.М., Борзов В.И. Задача коррекции в инерциальной навигации. М. Изд-во МГУ, 1982.
- Афанасьев В.
 И., Колмановский В.Б., Носов В.Р. Математическая теория конструироваеия систем управления. М. Изд-во Высшая школа, 1998.
И., Колмановский В.Б., Носов В.Р. Математическая теория конструироваеия систем управления. М. Изд-во Высшая школа, 1998.
Сборник задач по «Механике управляемых систем»
Настоящий сборник сформирован для сопровождения практических занятий по курсу “Механика управляемых систем”, читаемого студентам 4-го курса отделения Механики механико-математического факультета МГУ им. М.В. Ломоносова.
В 1967 году профессор кафедры прикладной механики Я.Н. Ройтенберг начал чтение разработанного им курса “Механика управляемых движений”. В 1986-89 годах профессора кафедры В.В. Александров и Н.А. Парусников модернизировали курс.
Специфика курса “Механика управляемых систем” заключается в том, что для его успешного освоения студентам необходимо активно использовать полученные ранее знания по теории обыкновенных дифференциальных уравнений, теоретической механике, теории вероятностей и случайных процессов, вариационного исчисления и других.
Сборник содержит краткие теоретические сведения, примеры решения задач и задания для самостоятельного решения. Включает в себя разделы по устойчивости, управляемости, наблюдаемости, стабилизации динамических систем, анализу стохастических систем, фильтру Калмана, принципу максимума Понтрягина и элементам прикладной теории оптимального управления движением. В сборнике имеются как относительно простые упражнения, так и задачи-исследования и теоретические вопросы. К некоторым упражнениям даны ответы или указания.
Включает в себя разделы по устойчивости, управляемости, наблюдаемости, стабилизации динамических систем, анализу стохастических систем, фильтру Калмана, принципу максимума Понтрягина и элементам прикладной теории оптимального управления движением. В сборнике имеются как относительно простые упражнения, так и задачи-исследования и теоретические вопросы. К некоторым упражнениям даны ответы или указания.
Составители сборника задач по «Механике управляемых систем» старший научный сотрудник лаборатории МОИДС О.Ю. Черкасов и научный сотрудник лаборатории управления и навигации М.Ю. Попеленский При подготовке сборника использовались как широко известные задачи теории автоматического управления и структурного анализа и линейного синтеза, так и адаптированные научные публикации и доклады конференций последних лет. Большинство задач предлагалось на семинарских занятиях по курсу “Механика управляемых систем”. Ряд задач основан на научных результатах, полученных преподавателями и сотрудниками кафедры прикладной механики механико-математического факультета, лаборатории навигации и управления и лаборатории математического обеспечения имитационных динамических систем: В. В. Александров, Ю.В. Болотин, Д.И. Бугров, Н.Б. Вавилова, А.А. Голован, С.С. Лемак, А.И. Матасов, Н.А. Парусников, М.Ю. Попеленский, В.В. Тихомиров, О.Ю. Черкасов, А.Г. Якушев.
В. Александров, Ю.В. Болотин, Д.И. Бугров, Н.Б. Вавилова, А.А. Голован, С.С. Лемак, А.И. Матасов, Н.А. Парусников, М.Ю. Попеленский, В.В. Тихомиров, О.Ю. Черкасов, А.Г. Якушев.
Вместе с учебным пособием “Оптимальное управление движением” данный сборник составляет единое целое руководство как по чтению лекций так и по проведению семинаров.
Предназначен для студентов и аспирантов, специализирующихся в области управления и оценивания динамических систем.
В.В. Александров
Н.А. Парусников
Здесь можно скачать разделы задачника, содержащие примеры решения задач.
Готовые решения по технической механике. Решение задач по теоретической механике
Приведены задания для расчетно-аналитических и расчетно-графических работ по всем разделам курса технической механики. Каждое задание включает описание решения задач с краткими методическими указаниями, даны примеры решения. В приложениях содержится необходимый справочный материал.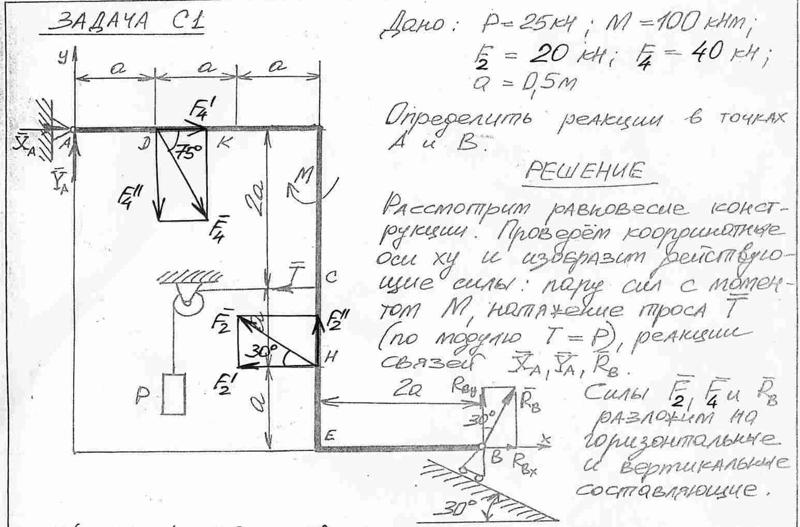 Для студентов строительных специальностей средних профессиональных учебных заведений.
Для студентов строительных специальностей средних профессиональных учебных заведений.
Определение реакций идеальных связей аналитическим способом.
1. Указывают точку, равновесие которой рассматривается. В задачах для самостоятельной работы такой точкой является центр тяжести тела или точка пересечения всех стержней и нитей.
2. Прикладывают к рассматриваемой точке активные силы. В задачах для самостоятельной работы активными силами являются собственный вес тела или вес груза, которые направлены вниз (правильнее – к центру тяжести земли). При наличии блока вес груза действует на рассматриваемую точку вдоль нити. Направление действия этой силы устанавливается из чертежа. Вес тела принято обозначать буквой G.
3. Мысленно отбрасывают связи, заменяя их действие реакциями связей. В предлагаемых задачах используются три вида связей – идеально гладкая плоскость, идеально жесткие прямолинейные стержни и идеально гибкие нити, – в дальнейшем именуемые соответственно плоскостью, стержнем и нитью.
ОГЛАВЛЕНИЕ
Предисловие
Раздел I. Самостоятельные и контрольные работы
Глава 1. Теоретическая механика. Статика
1.1. Определение реакций идеальных связей аналитическим способом
1.2. Определение опорных реакций балки на двух опорах при действии вертикальных нагрузок
1.3. Определение положения центра тяжести сечения
Глава 2. Сопротивление материалов
2.1. Подбор сечений стержней из расчета па прочность
2.2. Определение главных центральных моментов инерции сечения
2.3. Построение эпюр поперечных сил и изгибающих моментов для простой балки
2.4. Определение допустимого значения центрально-сжимающей силы
Глава 3. Статика сооружений
3.1. Построение эпюр внутренних усилий для простейшей одноконтурной рамы
3.2. Графическое определение усилий в стержнях фермы построением диаграммы Максвелла-Кремоны
3.3. Определение линейных перемещений в простейших консольных рамах
3.4. Расчет статически неопределимой (неразрезной) балки по уравнению трех моментов
Раздел II. Расчетно-графические работы
Расчетно-графические работы
Глава 4. Теоретическая механика. Статика
4.1. Определение усилий в стержнях простейшей консольной фермы
4.2. Определение опорных реакций балки на двух опорах
4.3. Определение положения центра тяжести сечения
Глава 5. Сопротивление материалов
5.1. Определение усилий в стержнях статически неопределимой системы
5.2. Определение главных моментов инерции сечения
5.3. Подбор сечения балки из прокатного двутавра
5.4. Подбор сечения центрально-сжатой составной стойки
Глава 6. Статика сооружений
6.1. Определение усилий в сечениях трехшарнирной арки
6.2. Графическое определение усилий в стержнях плоской фермы построением диаграммы Максвелла – Кремоны
6.3. Расчет статически неопределимой рамы
6.4. Расчет неразрезной балки по уравнению трех моментов
Приложения
Список литературы.
Бесплатно скачать электронную книгу в удобном формате, смотреть и читать:
Скачать книгу Сборник задач по технической механике, Сетков В. И., 2003 – fileskachat.com, быстрое и бесплатное скачивание.
И., 2003 – fileskachat.com, быстрое и бесплатное скачивание.
Скачать pdf
Ниже можно купить эту книгу по лучшей цене со скидкой с доставкой по всей России.
Многие студенты вузов сталкиваются с определенными трудностями, когда в их курсе обучения начинают преподавать базовые технические дисциплины, такие как сопротивление материалов и теоретическую механику . В этой статье будет рассмотрен один из таких предметов – так называемая техническая механика.
Техническая механика – это наука, изучающая различные механизмы, их синтез и анализ. На практике же это означает соединение трех дисциплин – сопротивления материалов, теоретической механики и деталей машин. Она удобна тем, что каждое учебное заведение выбирает, в какой пропорции преподавать эти курсы.
Соответственно, в большинстве контрольных работ задачи разбиты на три блока, которые необходимо решать по отдельности или вместе. Рассмотрим наиболее часто встречающиеся задачи.
Раздел первый.
 Теоретическая механика
Теоретическая механикаИз всего многообразия задач по теормеху чаще всего можно встретить задачи из раздела кинематики и статики. Это задачи на равновесие плоской рамы, определение законов движения тел и кинематический анализ рычажного механизма.
Для решения задач на равновесие плоской рамы необходимо воспользоваться уравнением равновесия плоской системы сил:
Сумма проекций всех сил на координатные оси равна нулю и сумма моментов всех сил относительно любой точки равна нулю. Решая совместно эти уравнения, определяем величину реакций всех опор плоской рамы.
В задачах на определение основных кинематических параметров движения тел необходимо, исходя из заданной траектории или закона движения материальной точки, определить её скорость, ускорение (полное, касательное и нормальное) и радиус кривизны траектории. Законы движения точки заданы уравнениями траектории:
Проекции скорости точки на координатные оси находятся путем дифференцирования соответствующих уравнений:
Дифференцируя уравнения скорости, находим проекции ускорения точки. Касательное и нормальное ускорения, радиус кривизны траектории находим графическим или аналитическим путем:
Касательное и нормальное ускорения, радиус кривизны траектории находим графическим или аналитическим путем:
Кинематический анализ рычажного механизма проводится по следующей схеме:
- Разбиение механизма на группы Ассура
- Построение для каждой из групп планов скоростей и ускорений
- Определение скоростей и ускорений всех звеньев и точек механизма.
Раздел второй. Сопротивление материалов
Сопротивление материалов – достаточно сложный для понимания раздел, с множеством всяческих задач, большинство из которых решается по своей методике. В целях упростить студентам их решение, наиболее часто в курсе прикладной механики дают элементарные задачи на простое сопротивление конструкций – причем вид и материал конструкции, как правило, зависит от профиля вуза.
Самыми распространенными являются задачи на растяжение-сжатие, на изгиб и на кручение.
В задачах на растяжение-сжатие необходимо построить эпюры продольных усилий и нормальных напряжений, а иногда еще и перемещений участков конструкции.
Для этого необходимо разбить конструкцию на участки, границами которых будут являться места, в которых приложена нагрузка или изменяется площадь поперечного сечения. Далее, применяя формулы равновесия твердого тела, определяем величины внутренних усилий на границах участков, и, с учетом площади поперечного сечения, внутренние напряжения.
По полученным данным строим графики – эпюры, принимая за ось графика ось симметрии конструкции.
Задачи на кручение подобны задачам на изгиб, за исключением того, что вместо растягивающих усилий к телу приложены крутящие моменты. С учетом этого необходимо повторить этапы расчета – разбиение на участки, определение закручивающих моментов и углов закручивания и построение эпюр.
В задачах на изгиб необходимо рассчитать и определить поперечные силы и изгибающие моменты для нагруженного бруса.
Сначала определяются реакции опор, в которых закреплен брус. Для этого нужно записать уравнения равновесия конструкции, с учетом всех действующих усилий.
После этого брус разбивается на участки, границами которых будут точи приложения внешних сил. Путем рассмотрения равновесия каждого участка в отдельности определяются поперечные силы и изгибающие моменты на границах участков. По полученным данным строятся эпюры.
Проверка поперечного сечения на прочность проводится следующим образом:
- Определяется местоположение опасного сечения – сечения, где будут действовать наибольшие изгибающие моменты.
- Из условия прочности при изгибе определяется момент сопротивления поперечного сечения бруса.
- Определяется характерный размер сечения – диаметр, длина стороны или номер профиля.
Раздел третий. Детали машин
Раздел «Детали машин» объединяет в себе все задачи на расчет механизмов, работающих в реальных условиях – это может быть привод конвейера или зубчатая передача. Существенно облегчает задачу то, что все формулы и методы расчета приведены в справочниках, и студенту необходимо лишь выбрать те из них, которые подходят для заданного механизма.
Литература
- Теоретическая механика: Методические указания и контрольные задания для студентов-заочников машиностроительных, строительных, транспортных, приборостроительных специальностей высших учебных заведений / Под ред. проф. С.М.Тарга, — М.: Высшая школа, 1989 г. Издание четвертое;
- А. В. Дарков, Г. С. Шпиро. «Сопротивление материалов»;
- Чернавский С.А. Курсовое проетирование деталей машин: Учеб. пособие для учащихся машиностроительных специальностей техникумов / С. А. Чернавский, К. Н. Боков, И. М. Чернин и др. — 2-е изд., перераб. и доп. — М. Машиностроение, 1988. — 416 с.: ил.
Решение технической механики на заказ
Наша компания также предлагает услуги по решению задач и контрольных работ по механике. Если у вас есть трудности с пониманием этого предмета, вы всегда можете заказать подробное решение у нас. Мы беремся за сложные задания!
можно бесплатно.
Кинематика
Кинематика материальной точки
Определение скорости и ускорения точки по заданным уравнениям ее движения
Дано: Уравнения движения точки: x = 12 sin(πt/6) ,
см; y = 6 cos 2 (πt/6) ,
см.
Установить вид ее траектории и для момента времени t = 1 с найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Поступательное и вращательное движение твердого тела
Дано:
t = 2 с; r 1 = 2 см, R 1 = 4 см; r 2 = 6 см, R 2 = 8 см; r 3 = 12 см, R 3 = 16 см; s 5 = t 3 – 6t (см).
Определить в момент времени t = 2 скорости точек A, C; угловое ускорение колеса 3; ускорение точки B и ускорение рейки 4.
Кинематический анализ плоского механизма
Дано:
R 1 , R 2 , L, AB, ω 1 .
Найти: ω 2 .
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна E. Стержни соединены с помощью цилиндрических шарниров. Точка D расположена в середине стержня AB.
Дано: ω 1 , ε 1 .
Найти: скорости V A , V B , V D и V E ; угловые скорости ω 2 , ω 3 и ω 4 ; ускорение a B ; угловое ускорение ε AB звена AB; положения мгновенных центров скоростей P 2 и P 3 звеньев 2 и 3 механизма.
Определение абсолютной скорости и абсолютного ускорения точки
Прямоугольная пластина вращается вокруг неподвижной оси по закону φ = 6 t 2 – 3 t 3 . Положительное направление отсчета угла φ показано на рисунках дуговой стрелкой. Ось вращения OO 1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой BD движется точка M . Задан закон ее относительного движения, т. е. зависимость s = AM = 40(t – 2 t 3) – 40 (s – в сантиметрах, t – в секундах). Расстояние b = 20 см . На рисунке точка M показана в положении, при котором s = AM > 0 (при s 0 точка M находится по другую сторону от точки A ).
Найти абсолютную скорость и абсолютное ускорение точки M в момент времени t 1 = 1 с .
Динамика
Интегрирование дифференциальных уравнений движения материальной точки, находящейся под действием переменных сил
Груз D массой m, получив в точке A начальную скорость V 0 , движется в изогнутой трубе ABC, расположенной в вертикальной плоскости. На участке AB, длина которого l, на груз действует постоянная сила T(ее направление показано на рисунке) и сила R сопротивления среды (модуль этой силы R = μV 2 , вектор R направлен противоположно скорости V груза).
На участке AB, длина которого l, на груз действует постоянная сила T(ее направление показано на рисунке) и сила R сопротивления среды (модуль этой силы R = μV 2 , вектор R направлен противоположно скорости V груза).
Груз, закончив движение на участке AB, в точке B трубы, не изменяя значения модуля своей скорости, переходит на участок BC. На участке BC на груз действует переменная сила F, проекция F x которой на ось x задана.
Считая груз материальной точкой, найти закон его движения на участке BC, т.е. x = f(t), где x = BD. Трением груза о трубу пренебречь.
Скачать решение задачи
Теорема об изменении кинетической энергии механической системы
Механическая система состоит из грузов 1 и 2, цилиндрического катка 3, двухступенчатых шкивов 4 и 5. Тела системы соединены нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Каток (сплошной однородный цилиндр) катится по опорной плоскости без скольжения. Радиусы ступеней шкивов 4 и 5 равны соответственно R 4 = 0,3 м, r 4 = 0,1 м, R 5 = 0,2 м, r 5 = 0,1 м. Массу каждого шкива считать равномерно распределенной по его внешнему ободу. Опорные плоскости грузов 1 и 2 шероховатые, коэффициент трения скольжения для каждого груза f = 0.1.
Массу каждого шкива считать равномерно распределенной по его внешнему ободу. Опорные плоскости грузов 1 и 2 шероховатые, коэффициент трения скольжения для каждого груза f = 0.1.
Под действием силы F, модуль которой изменяется по закону F = F(s), где s – перемещение точки ее приложения, система приходит в движение из состояния покоя. При движении системы на шкив 5 действуют силы сопротивления, момент которых относительно оси вращения постоянный и равен M 5 .
Определить значение угловой скорости шкива 4 в тот момент времени, когда перемещение s точки приложения силы F станет равным s 1 = 1,2 м.
Скачать решение задачи
Применение общего уравнения динамики к исследованию движения механической системы
Для механической системы определить линейное ускорение a 1 . Считать, что у блоков и катков массы распределены по наружному радиусу. Тросы и ремни считать невесомыми и нерастяжимыми; проскальзывание отсутствует. Трением качения и трением скольжения пренебречь.
Скачать решение задачи
Применение принципа Даламбера к определению реакций опор вращающегося тела
Вертикальный вал AK, вращающийся равномерно с угловой скоростью ω = 10 с -1 , закреплен подпятником в точке A и цилиндрическим подшипником в точке D.
К валу жестко прикреплены невесомый стержень 1 длиной l 1 = 0,3 м, на свободном конце которого расположен груз массой m 1 = 4 кг, и однородный стержень 2 длиной l 2 = 0,6 м, имеющий массу m 2 = 8 кг. Оба стержня лежат в одной вертикальной плоскости. Точки прикрепления стержней к валу, а также углы α и β указаны в таблице. Размеры AB=BD=DE=EK=b, где b = 0,4 м. Груз принять за материальную точку.
Пренебрегая массой вала, определить реакции подпятника и подшипника.
Теоретическая механика – это раздел механики, в котором излагаются основные законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика является наукой, в которой изучаются перемещения тел с течением времени (механические движения). Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория пластичности, теория механизмов и машин, гидроаэродинамика) и многих технических дисциплин.
Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория пластичности, теория механизмов и машин, гидроаэродинамика) и многих технических дисциплин.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел.
Механическое взаимодействие – это такое взаимодействие, в результате которого изменяется механическое движение или изменяется взаимное положение частей тела.
Статика твердого тела
Статика — это раздел теоретической механики, в котором рассматриваются задачи на равновесие твердых тел и преобразования одной системы сил в другую, ей эквивалентную.
- Основные понятия и законы статики
- Абсолютно твердое тело (твердое тело, тело) – это материальное тело, расстояние между любыми точками в котором не изменяется.
- Материальная точка – это тело, размерами которого по условиям задачи можно пренебречь.
- Свободное тело – это тело, на перемещение которого не наложено никаких ограничений.

- Несвободное (связанное) тело – это тело, на перемещение которого наложены ограничения.
- Связи – это тела, препятствующие перемещению рассматриваемого объекта (тела или системы тел).
- Реакция связи — это сила, характеризующая действие связи на твердое тело. Если считать силу, с которой твердое тело действует на связь, действием, то реакция связи является противодействием. При этом сила – действие приложена к связи, а реакция связи приложена к твердому телу.
- Механическая система – это совокупность взаимосвязанных между собой тел или материальных точек.
- Твердое тело можно рассматривать как механическую систему, положения и расстояние между точками которой не изменяются.
- Сила – это векторная величина, характеризующая механическое действие одного материального тела на другое.
Сила как вектор характеризуется точкой приложения, направлением действия и абсолютным значением. Единица измерения модуля силы – Ньютон.
- Линия действия силы – это прямая, вдоль которой направлен вектор силы.
- Сосредоточенная сила – сила, приложенная в одной точке.
- Распределенные силы (распределенная нагрузка) – это силы, действующие на все точки объема, поверхности или длины тела.
Распределенная нагрузка задается силой, действующей на единицу объема (поверхности, длины).
Размерность распределенной нагрузки – Н/м 3 (Н/м 2 , Н/м). - Внешняя сила – это сила, действующая со стороны тела, не принадлежащего рассматриваемой механической системе.
- Внутренняя сила – это сила, действующая на материальную точку механической системы со стороны другой материальной точки, принадлежащей рассматриваемой системе.
- Система сил – это совокупность сил, действующих на механическую систему.
- Плоская система сил – это система сил, линии действия которых лежат в одной плоскости.
- Пространственная система сил – это система сил, линии действия которых не лежат в одной плоскости.
- Система сходящихся сил – это система сил, линии действия которых пересекаются в одной точке.
- Произвольная система сил – это система сил, линии действия которых не пересекаются в одной точке.
- Эквивалентные системы сил – это такие системы сил, замена которых одна на другую не изменяет механического состояния тела.
Принятое обозначение: . - Равновесие – это состояние, при котором тело при действии сил остается неподвижным или движется равномерно прямолинейно.
- Уравновешенная система сил – это система сил, которая будучи приложена к свободному твердому телу не изменяет его механического состояния (не выводит из равновесия).
. - Равнодействующая сила – это сила, действие которой на тело эквивалентно действию системы сил.
. - Момент силы – это величина, характеризующая вращающую способность силы.
- Пара сил – это система двух параллельных равных по модулю противоположно направленных сил.
Принятое обозначение: .
Под действием пары сил тело будет совершать вращательное движение. - Проекция силы на ось – это отрезок, заключенный между перпендикулярами, проведенными из начала и конца вектора силы к этой оси.
Проекция положительна, если направление отрезка совпадает с положительным направлением оси. - Проекция силы на плоскость – это вектор на плоскости, заключенный между перпендикулярами, проведенными из начала и конца вектора силы к этой плоскости.
- Закон 1 (закон инерции). Изолированная материальная точка находится в покое либо движется равномерно и прямолинейно.
Равномерное и прямолинейное движение материальной точки является движением по инерции. Под состоянием равновесия материальной точки и твердого тела понимают не только состояние покоя, но и движение по инерции. Для твердого тела существуют различные виды движения по инерции, например равномерное вращение твердого тела вокруг неподвижной оси. - Закон 2.
 Твердое тело находится в равновесии под действием двух сил только в том случае, если эти силы равны по модулю и направлены в противоположные стороны по общей линии действия.
Твердое тело находится в равновесии под действием двух сил только в том случае, если эти силы равны по модулю и направлены в противоположные стороны по общей линии действия.
Эти две силы называются уравновешивающимися.
Вообще силы называются уравновешивающимися, если твердое тело, к которому приложены эти силы, находится в покое. - Закон 3. Не нарушая состояния (слово «состояние» здесь означает состояние движения или покоя) твердого тела, можно добавлять и отбрасывать уравновешивающиеся силы.
Следствие. Не нарушая состояния твердого тела, силу можно переносить по ее линии действия в любую точку тела.
Две системы сил называются эквивалентными, если одну из них можно заменить другой, не нарушая состояния твердого тела. - Закон 4. Равнодействующая двух сил, приложенных в одной точке, приложена в той же точке, равна по модулю диагонали параллелограмма, построенного на этих силах, и направлена вдоль этой
диагонали.
По модулю равнодействующая равна: - Закон 5 (закон равенства действия и противодействия) .
 Силы, с которыми два тела действуют друг на друга, равны по модулю и направлены в противоположные стороны по одной прямой.
Силы, с которыми два тела действуют друг на друга, равны по модулю и направлены в противоположные стороны по одной прямой.
Следует иметь в виду, что действие – сила, приложенная к телу Б , и противодействие – сила, приложенная к телу А , не уравновешиваются, так как они приложены к разным телам. - Закон 6 (закон отвердевания) . Равновесие нетвердого тела не нарушается при его затвердевании.
Не следует при этом забывать, что условия равновесия, являющиеся необходимыми и достаточными для твердого тела, являются необходимыми, но недостаточными для соответствующего нетвердого тела. - Закон 7 (закон освобождаемости от связей). Несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив действие связей соответствующими реакциями связей.
- Связи и их реакции
- Гладкая поверхность ограничивает перемещение по нормали к поверхности опоры. Реакция направлена перпендикулярно поверхности.
- Шарнирная подвижная опора ограничивает перемещение тела по нормали к опорной плоскости. Реакция направлена по нормали к поверхности опоры.
- Шарнирная неподвижная опора противодействует любому перемещению в плоскости, перпендикулярной оси вращения.
- Шарнирный невесомый стержень противодействует перемещению тела вдоль линии стержня. Реакция будет направлена вдоль линии стержня.
- Глухая заделка противодействует любому перемещению и вращению в плоскости. Ее действие можно заменить силой, представленной в виде двух составляющих и парой сил с моментом.
Кинематика
Кинематика — раздел теоретической механики, в котором рассматриваются общие геометрические свойства механического движения, как процесса, происходящего в пространстве и во времени. Движущиеся объекты рассматривают как геометрические точки или геометрические тела.
- Основные понятия кинематики
- Закон движения точки (тела) – это зависимость положения точки (тела) в пространстве от времени.

- Траектория точки – это геометрическое место положений точки в пространстве при ее движении.
- Скорость точки (тела) – это характеристика изменения во времени положения точки (тела) в пространстве.
- Ускорение точки (тела) – это характеристика изменения во времени скорости точки (тела).
- Определение кинематических характеристик точки
- Траектория точки
В векторной системе отсчета траектория описывается выражением: .
В координатной системе отсчета траектория определяется по закону движения точки и описывается выражениями z = f(x,y) — в пространстве, или y = f(x) – в плоскости.
В естественной системе отсчета траектория задается заранее. - Определение скорости точки в векторной системе координат
При задании движения точки в векторной системе координат отношение перемещения к интервалу времени называют средним значением скорости на этом интервале времени: .
Принимая интервал времени бесконечно малой величиной, получают значение скорости в данный момент времени (мгновенное значение скорости): .
Вектор средней скорости направлен вдоль вектора в сторону движения точки, вектор мгновенной скорости направлен по касательной к траектории в сторону движения точки.
Вывод: скорость точки – векторная величина, равная производной от закона движения по времени.
Свойство производной: производная от какой либо величины по времени определяет скорость изменения этой величины. - Определение скорости точки в координатной системе отсчета
Скорости изменения координат точки:
.
Модуль полной скорости точки при прямоугольной системе координат будет равен:
.
Направление вектора скорости определяется косинусами направляющих углов:
,
где — углы между вектором скорости и осями координат. - Определение скорости точки в естественной системе отсчета
Скорость точки в естественной системе отсчета определяется как производная от закона движения точки: .
Согласно предыдущим выводам вектор скорости направлен по касательной к траектории в сторону движения точки и в осях определяется только одной проекцией .
- Кинематика твердого тела
- В кинематике твердых тел решаются две основные задачи:
1) задание движения и определение кинематических характеристик тела в целом;
2) определение кинематических характеристик точек тела. - Поступательное движение твердого тела
Поступательное движение — это движение, при котором прямая, проведенная через две точки тела, остается параллельной ее первоначальному положению.
Теорема: при поступательном движении все точки тела движутся по одинаковым траекториям и имеют в каждой момент времени одинаковые по модулю и направлению скорости и ускорения .
Вывод: поступательное движение твердого тела определяется движением любой его точки, в связи с чем, задание и изучение его движения сводится к кинематике точки . - Вращательное движение твердого тела вокруг неподвижной оси
Вращательное движение твердого тела вокруг неподвижной оси — это движение твердого тела, при котором две точки, принадлежащие телу, остаются неподвижными в течение всего времени движения.
Положение тела определяется углом поворота . Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
Закон вращательного движения тела вокруг неподвижной оси .
Угловую скорость и угловое ускорение тела определим методом дифференцирования:
— угловая скорость, рад/с;
— угловое ускорение, рад/с².
Если рассечь тело плоскостью перпендикулярной оси, выбрать на оси вращения точку С и произвольную точку М , то точка М будет описывать вокруг точки С окружность радиуса R . За время dt происходит элементарный поворот на угол , при этом точка М совершит перемещение вдоль траектории на расстояние .
Модуль линейной скорости:
.
Ускорение точки М при известной траектории определяется по его составляющим :
,
где .
В итоге, получаем формулы
тангенциальное ускорение: ;
нормальное ускорение: .
Динамика
Динамика — это раздел теоретической механики, в котором изучаются механические движении материальных тел в зависимости от причин, их вызывающих.
- Основные понятия динамики
- Инерционность — это свойство материальных тел сохранять состояние покоя или равномерного прямолинейного движения, пока внешние силы не изменят этого состояния.
- Масса — это количественная мера инерционности тела. Единица измерения массы — килограмм (кг).
- Материальная точка — это тело, обладающее массой, размерами которого при решении данной задачи пренебрегают.
- Центр масс механической системы — геометрическая точка, координаты которой определяются формулами:
где m k , x k , y k , z k — масса и координаты k -той точки механической системы, m — масса системы.
В однородном поле тяжести положение центра масс совпадает с положением центра тяжести. - Момент инерции материального тела относительно оси – это количественная мера инертности при вращательном движении.
Момент инерции материальной точки относительно оси равен произведению массы точки на квадрат расстояния точки от оси:
.
Момент инерции системы (тела) относительно оси равен арифметической сумме моментов инерции всех точек: - Сила инерции материальной точки — это векторная величина, равная по модулю произведению массы точки на модуль ускорения и направленная противоположно вектору ускорения:
- Сила инерции материального тела — это векторная величина, равная по модулю произведению массы тела на модуль ускорения центра масс тела и направленная противоположно вектору ускорения центра масс: ,
где — ускорение центра масс тела. - Элементарный импульс силы — это векторная величина , равная произведению вектора силы на бесконечно малый промежуток времени dt :
.
Полный импульс силы за Δt равен интегралу от элементарных импульсов:
. - Элементарная работа силы — это скалярная величина dA , равная скалярному прои
Прикладная механика
Год ( По возрастанию | По убыванию )
Карталис Н. И., Пронин В.А. Год: 2013
И., Пронин В.А. Год: 2013
Изложены рекомендации по проектированию корпусных деталей редукторов общего назначения и способы соединения корпусных деталей. Издание предназначено студентам, обучвающимся по направлениям 140700, 141200, 151000, 190600.
Киницкий Я.Т. Год: 2012
Изложены основные понятия и определения курса, структура и классификация механизмов и машин, общие методы кинематического и динамического исследования механизмов, приведены некоторые сведения из теории регулирования движения машин и уравновешивания механизмов. Предназначено для студентов инженерно-технических специальностей высших учебных заведений.
Кирсанов М.Н. Год: 2012. Издание: 1-е изд.
Изложены решения задач по теоретической механике и сопротивлению материалов: определение реакций опор составных конструкций, кинематический анализ многозвенных механизмов, составление уравнений движения в форме Лагранжа, расчет статически неопределимых рам и др. Даны тексты и пояснения к 55 вспомогательным и иллюстративным программам для решения задач в системе Maple,…
Даны тексты и пояснения к 55 вспомогательным и иллюстративным программам для решения задач в системе Maple,…
Кислов А.Н., Поляков А.А., Лялина Ф.Г., Ковалев О.С. Год: 2017. Издание: 2-е изд., стер.
В практикуме даны краткие сведения, необходимые в процессе выполнения лабораторных работ в рамках курса «Сопротивление материалов». Приведены схемы установок и приборов, которые используются в работах, описаны методы испытаний материалов, измерения напряжений и деформаций. Издание предназначено для студентов всех специальностей.
Кислов А.Н., Поляков А.А., Лялина Ф.Г., Ковалев О.С., Чупин В.В., Черногубов Д.Е. Год: 2015
В практикуме даны краткие сведения, необходимые в процессе выполнения лабораторных работ в рамках курса «Сопротивление материалов». Приведены схемы установок и приборов, которые используются в работах, описаны методы испытаний материалов, измерения напряжений и деформаций. Издание предназначено для студентов всех специальностей.
Издание предназначено для студентов всех специальностей.
Климов А.С., Смирнов И.В., Кудинов А. К., Кудинова Г. Э. Год: 2011. Издание: 3-е изд., испр.
Рассмотрены основные и сопутствующие процессы, сопровождающие формирование соединения при точечной, шовной, рельефной и стыковой контактной сварке. Изложены вопросы построения оборудования, проектирования технологии, автоматизации и управления процессами контактной сварки.Книга является учебным пособием для студентов высших учебных заведений, специализирующихся в области…
Кристалинский Р.Е., Шапошников Н.Н. Год: 2010. Издание: 1-е изд.
В учебном пособии рассматривается широкий спектр вариационных задач строительной механики. Показано, что для решения этих задач весьма эффективно может быть использована одна из наиболее мощных систем компьютерной математики — Mathematica. Пособие будет полезно для студентов строительных специальностей, студентов, обучающихся по специальностям «Прикладная математика. ..
..
Кудрявцев С. Г., Сердюков В. Н. Год: 2013. Издание: 1-е изд.
Учебное пособие содержит краткие теоретические сведения по дисциплине «Сопротивление материалов» и примеры тестовых заданий с решениями. Тематическая структура пособия полностью совпадает со структурой аттестационных педагогических измерительных материалов (АПИМ), которая содержит десять разделов (дидактических единиц). Каждый раздел, в свою очередь, состоит из четырех…
Кузьмин Л.Ю., Сергиенко В.Н. Год: 2016. Издание: 2-е изд., испр. и доп.
Текст EXCEL-программ находится по адресу: www.mensorium.ru/books/book.aspx?n=2 Учебное пособие предназначено для студентов очного и заочного обучения по направлению «Строительство» (бакалавров). Может быть полезным для студентов других технических специальностей и направлений обучения при расчетах нагрузок конструкций.
Кузьмин Л. Ю., Сергиенко В.Н., Ломунов В.К. Год: 2016. Издание: 2-е изд., испр. и доп.
Ю., Сергиенко В.Н., Ломунов В.К. Год: 2016. Издание: 2-е изд., испр. и доп.
Приведены основы теории расчета стержней на прочность, жесткость и устойчивость, сопровождающиеся многочисленными примерами, приближенными к контрольным задачам для студентов заочной формы обучения. Последовательность изложения материала отличается от традиционного: сначала рассматриваются геометрические характеристики бруса, вводятся понятия продольной и главных осей…
Кулаев Д.Х. Год: 2009
Приведены методические указания к выполнению лабораторных работ по дисциплине “Теория механизмов и машин”, даны формы отчётов.
Кулаев Д.Х. Год: 2009
Приведены рабочая программа дисциплины “Теория механизмов и машин”, методические указания для самостоятельной работы и примеры тестовых заданий для студентов специальносьтей “Машины и аппараты пищевых производств”, “Пищевая инженерия малых предприятий” и направления “Технологические машины и оборудование”
Куликов Ю. А. Год: 2017. Издание: 1-е изд.
А. Год: 2017. Издание: 1-е изд.
Книга содержит материал 19 оригинальных лекций по курсу «Сопротивление материалов». Лекции отражают многолетний опыт работы автора и отвечают требованиям государственных образовательных стандартов для технических и технологических специальностей вузов. В компактной и лаконичной форме изложены теоретические основы курса и представлены практические методы расчета на…
Ладогубец Н.В., Лузик Э.В. Год: 2012
Содержит основные положения, формулы и законы, используемые при изучении курса “Теоретическая механика”, включая динамику материальной точки и динамику материальной системы и твердого тела. Даны алгоритмы решения задач, вопросы для самоконтроля и тестовые задания. Предназначено для студентов инженерно-технических специальностей высших учебных заведений.
Лазарев В.Л., Кириков А.Ю. Год: 2008
Рассматриваются вопросы экспериментальных исследований частотных и переходных характеристик различных объектов и корректирующих звеньев. Для проведения экспериментальных исследований дается описание и методика проведения таких исследований на специальном стенде.
Для проведения экспериментальных исследований дается описание и методика проведения таких исследований на специальном стенде.
Леликов О.П. Год: 2007. Издание: 3-е изд. перераб. и доп.
Изложены теоретические основы и инженерные методы расчета и проектирования деталей и узлов общемашиностроительного применения. Рассмотрены наиболее сложные темы по основным разделам курса “Детали машин”: разъемные и неразъемные соединения, передачи трением и зацеплением валы и оси подшипники качения и скольжения муфты приводов. 3-е издание (2-е изд. 2004 г.) исправлено…
Мамченко В.О. Год: 2014
Учебно-методическое пособие содержит материал к расчетно-графической работе, предусмотренной учебной программой курса «Прикладная механика». Предназначено для бакалавров направлений 140700, 141200, 151000, 190600, 220700 всех форм обучения.
Межецкий Г.Д., ЗАГРЕБИН Г.Г., Решетник Н.Н. Год: 2016. Издание: 5-е изд.
В предлагаемом учебнике рассмотрены разделы: осевое растяжение-сжатие; сдвиг; кручение; изгиб; геометрические характеристики сечений; расчеты на прочность и основные теории прочности, понятие о статистически определимых и статически неопределимых системах; энергетические методы расчета перемещений в стержневых системах; статически неопределимые системы; сложное сопротивление;…
Мельников В.Г., Иванов С.Е., Мельников Г.И., Кривошеев А.Г. Год: 2010
В пособии излагаются методические рекомендации к выполнению лабораторных работ по дисциплине “Сопротивлению материалов”. Предназначено для студентов всех инженерных специальностей, изучающих курс “Сопротивление материалов”.
Миролюбов И.Н., Алмаметов Ф.З., Курицин Н.А., Изотов И.Н. Год: 2014. Издание: 9-е изд., испр.
В пособии представлены основные положение теории, методические указания, примеры решения типовых задач, задачи для самостоятельного решения, ответы к ним. В приложении дан справочный материал. В издание включен материал по тонкостенным стержням, пластинкам и оболочкам, а также использованию компьютерных программ при решении задач и применению программированного контроля.
Проблемы и решения инженерной механики | Механика твердого тела и материалы
Этот всеобъемлющий и автономный учебник поможет студентам получить представление об основных концепциях и приложениях инженерной механики. Обладая базовыми предварительными знаниями, читатели ознакомятся с важными концепциями инженерной механики, такими как диаграммы свободного тела, принципы передачи сил, закон трения Кулона, анализ сил в элементах фермы и прямолинейное движение в горизонтальном направлении.Важные теоремы, включая теорему Лами, теорему Вариньона, теорему о параллельной оси и теорему о перпендикулярной оси, обсуждаются поэтапно для большей ясности. Подробно обсуждаются применения трения лестницы, трения клина, трения винта и трения ленты. Учебник в первую очередь написан для студентов бакалавриата инженерных специальностей в Индии. Многочисленные теоретические вопросы, нерешенные числовые задачи и решенные проблемы включены по всему тексту, чтобы развить четкое понимание ключевых принципов инженерной механики.Этот текст является идеальным ресурсом для студентов первого курса инженерных специальностей, изучающих вводный односеместровый курс инженерной механики.
- Излагает фундаментальные принципы простым языком и анализирует различные методы / альтернативы для решения проблем
- Для решения числовых задач принята пошаговая методология
- Более 400 решенных примеров помогут студентам подготовиться к конкурсным экзаменам, в том числе к экзаменам на получение диплома в области инженерии (GATE) и Indian Engineering Services (IES)
- Обсуждает важные темы, включая свободную вибрацию, трение клина, трение лестницы и трение ремня, с помощью решенных задач.
Отзывы клиентов
Еще не просмотрел
Оставьте отзыв первым
Отзыв не размещен из-за ненормативной лексики
×Подробная информация о продукте
- Дата публикации: май 2018 г.
- формат: Мягкая обложка
- isbn: 9781108411622
- размеры: 240 x 183 x 34 мм
- вес: 1.06кг
- наличие: В наличии
Оглавление
Предисловие
Благодарность
Посвящение
1. Введение
2. Двумерные системы параллельных сил
3. Двумерные системы несовпадающих сил
4. Трение
5. Применение трения
6. Анализ ферм
7. Центроид и центр тяжести
8. Момент инерции
9. Диаграммы поперечной силы и изгибающего момента
10. Кинематика: прямолинейное движение частиц
11.Кинематика: криволинейное движение частиц
12. Кинетика частиц
13. Работа и энергия
14. Импульс и импульс
15. Кинематика твердого тела
16. Кинетика твердого тела
17. Виртуальная работа.
Авторы
Аршад Нур Сиддикее , Университет Джамиа Милия Исламия, Нью-Дели
Аршад Нур Сиддики – профессор кафедры машиностроения Университета Джамиа Миллия Исламия, Нью-Дели, Индия.Он получил докторскую степень. от Индийского технологического института, Дели. Его исследовательские интересы включают корреляцию свойств структуры материалов, сварочную технику, механическую обработку и оптимизацию конструкции и параметров процесса с использованием нечеткого моделирования. Он опубликовал более 75 статей в журналах с национальной и международной репутацией. С 2005 по 2007 год он работал помощником директора Всеиндийского совета технического образования (AICTE).
Захид А. Хан , Университет Джамиа Милия Исламия, Нью-Дели
Захид А.Хан – профессор кафедры машиностроения в Университете Джамиа Миллия Исламия, Нью-Дели. Он получил докторскую степень. в 2001 году из Университета Джамия Миллия Исламия, Нью-Дели. Его исследовательские интересы включают оптимизацию параметров процессов проектирования и производства, искусственную нейронную сеть (ИНС), нечеткое моделирование и эргономику окружающей среды. Он опубликовал более 90 статей в журналах с национальной и международной репутацией.
Панкул Гоэль , Инженерный колледж IMS, Газиабад, Индия
Панкул Гоэль – доцент кафедры машиностроения Инженерного колледжа IMS, Газиабад.У него более пятнадцати лет преподавательского и отраслевого опыта, он опубликовал несколько статей в журналах с национальной и международной репутацией. Его области исследований включают механическую обработку, сварку трением с перемешиванием, оптимизацию конструкции и технологических параметров.
(PDF) Решение инженерных задач с использованием вычислительной механики
viii
энергии и вариационных принципов. Практикующие инженеры также извлекут выгоду из подхода
этой рукописи, поскольку они смогут изучить теоретические аспекты типичных методов аппроксимации
, таких как методы конечных элементов, в основном, по
самостоятельно.Таким образом, мы можем гарантировать, что эта книга заполнит пробел в личной библиотеке
многих инженеров, которые пытаются или планируют использовать эти методы в своем следующем анализе
. Рекомендуемый фон для успешного чтения этой книги:
Требуются знания механики твердого тела, математического анализа и базового программирования.
Мотивация
При написании этого учебника мы всегда держали в уме читателя. После
лет использования этой рукописи выпускники инженерных специальностей (из Университета Пуэрто
Рико в Маягуэсе и Калифорнийского университета в Лос-Анджелесе) сочли рукопись
очень полезной на своих курсах и на работе.В течение многих лет преподавая и применяя этот предмет
, мы пришли к выводу, что студенты и инженеры
также часто используют подход «черного ящика» при использовании коммерческого программного обеспечения для вычислений
. Следовательно, основная цель книги – обеспечить фундаментальную инженерию
на уровне, который достаточно доступен для тех, кто впервые знакомится с темой
. В книге также делается попытка дать интуитивное, а также
математическое понимание предмета с использованием современных математических инструментов.После того, как
прочитает эту книгу, читатель сможет:
1. Объяснять, какова цель и что такое вариационные принципы.
2. Понимать и применять концепции вариационного исчисления.
3. Используйте виртуальные принципы работы для аппроксимации задач прикладной механики.
4. Приближенные нестационарные задачи прикладной механики.
5. Применяйте концепции к упругим пружинам, осевым стержням, балкам, пластинам.
Математический уровень
Мы довели математику до базовых знаний по линейной алгебре, дифференциальным уравнениям
и программированию.Для тех, кто не знаком с линейной алгеброй, мы включили приложение
, которое позволит читателю самостоятельно изучить или просмотреть эти темы
. Авторы предполагают, что у читателей мало опыта программирования
языков и численных методов.
Организация и тематика главы
Формат этой книги удобен для студентов, поскольку каждая глава начинается с инструктивных целей и заканчивается кратким изложением главы, в котором освещаются наиболее важные аспекты
главы с описанием текущих задач. исследования по темам pre-
, изложенным в главе.Он включает в себя множество примеров, специально проработанных с
педагогическим подходом, с использованием пошаговой процедуры, которую легко применить к
для широкого круга инженерных задач. В конце каждой главы можно найти
разнообразных задач, которые были тщательно проработаны в прилагаемом к учебнику руководстве по решению
, доступном онлайн для преподавателей. Акцент был сделан на
приложениях, чтобы заинтересовать читателя предметом.
1.
Глава 1 представляет собой обзор механики сплошной среды. Поскольку большинство студентов в нашем кампусе
проходят отдельный курс по механике сплошных сред, мы опираемся на эти знания
.
Содержание “Прикладная механика в технологии машиностроения”
Содержание “Прикладная механика в технологии машиностроения”Содержание «Прикладная механика для инженерных технологий» / Кейт М. Уокер.
Библиографическая запись и ссылки на соответствующую информацию доступны из каталога Библиотеки Конгресса.
Примечание: Данные содержания генерируются машиной на основе предварительной публикации, предоставленной издателем. Содержание может отличаться от печатной книги, быть неполным или содержать другую кодировку.
СОДЕРЖАНИЕ ЧАСТЬ ПЕРВАЯ: СТАТИСТИКА 1 Введение 1 1? 1 Что и почему прикладная механика 1 1–2 Единицы и основные термины 2 1? 3 Метод решения проблемы и качество исполнения 8 1–4 Числовая точность и значащие числа 12 1–5 Требуется математика 13 1-6 Алгебраическое уравнение? Одно неизвестно 13 1-7 Одновременные уравнения? Два неизвестных 15 1-8 Квадратичные уравнения 17 1? 9 Тригонометрия: прямоугольные треугольники 18 1-10 Законы синуса и косинуса: неправильные треугольники 20 1? 11 Геометрия 23 Советы по решению проблем 25 Проблемы 26 Обзор задач 36 2 Силы, векторы и результаты 41 2 × 1 Векторы 41 2–2 Типы силы, характеристики и единицы 43 2? 3 Результат 44 2 × 4 Сложение векторов: графическое (кончик к хвосту) 45 2? 5 Сложение вектора: Аналитический 47 2-6 Компоненты 49 2–7 Сложение вектора: компоненты 52 Советы по решению проблем 55 Проблемы 55 Задачи обзора 65 3 момента и пары 69 3? 1 момент силы 69 3? 2 Пары 72 Советы по решению проблем 78 Проблемы 78 Задачи обзора 88 4 Равновесие 91 4? 1 Диаграммы свободного тела 91 4–2 Условные обозначения диаграмм свободного тела 93 4? 3 Три уравнения равновесия 103 4–4 двухсиловых члена 107 4? 5 шкивов 110 4–6 Копланарные системы параллельных сил 113 4-7 Копланарные параллельные силовые системы 117 4–8 Копланарные системы несовпадающих сил 123 Советы по решению проблем 127 Проблемы 128 Задачи обзора 151 5 Структуры и элементы 157 5? 1 Метод соединения 157 5? 2 Метод разрезов 169 5? 3 Метод членов 173 Советы по решению проблем 182 Проблемы 183 Обзор задач 209 6 Трехмерное равновесие 215 6? 1 Результат параллельных сил 215 6? 2 Равновесие параллельных сил 219 6? 3 Составляющие и результаты сил в космосе 220 6? 4 Равновесие в трех измерениях 224 6–5 Несовпадающие трехмерные системы 225 6–6 одновременных трехмерных систем 230 Советы по решению проблем 234 Проблемы 235 Проблемы на обзоре 262 7 Трение 255 7? 1 Введение 255 7? 2 Законы трения для сухих поверхностей 255 7? 3 Коэффициенты трения 256 7? 4 Угол трения 257 7? 5 Трение ремня 265 Советы по решению проблем 270 Проблемы 271 Обзор задач 285 8 Центроиды и центр тяжести 289 8? 1 Введение 289 8? 2 Центроида простых областей 290 8? 3 Центроиды составных областей 292 8? 4 Центроиды линий 293 Советы по решению проблем 296 Проблемы 297 Обзор задач 305 9 Момент инерции 307 9? 1 Момент инерции площади 307 9? 2 Теорема о параллельных осях 308 9? 3 Момент инерции композитных областей 312 9? 4 Радиус вращения 315 9? 5 Массовый момент инерции 317 9? 6 Массовый момент инерции составных тел 321 9? 7 Радиус вращения тел 324 Советы по решению проблем 324 Проблемы 325 Проблемы на обзоре 334 ЧАСТЬ ВТОРАЯ: ДИНАМИКА 10 Кинематика: прямолинейное движение 337 10? 1 Введение 337 10? 2 Смещение 338 10? 3 Скорость 339 10? 4 Разгон 340 10? 5 Прямолинейное движение с равномерным ускорением 342 10? 6 снарядов 348 Советы по решению проблем 353 Проблемы 353 Обзор задач 361 11 кинематика: угловое движение 365 11? 1 Введение 365 11? 2 Угловое смещение 365 11? 3 Угловая скорость 366 11? 4 Угловое ускорение 367 11? 5 Угловое движение с равномерным ускорением 368 11? 6 Связь между прямолинейным и угловым движением 371 11? 7 Нормальное и тангенциальное ускорение 374 Советы по решению проблем 378 Проблемы 378 Проблемы на обзоре 386 12 Движение Самолетом 391 12? 1 Относительное движение 391 12? 2 Катящееся колесо 404 12? 3 Мгновенный центр вращения 407 Советы по решению проблем 415 Проблемы 415 Проблемы на обзоре 434 13 Кинетика 439 13? 1 Введение 439 13? 2 Линейная сила инерции 440 13? 3 Линейная сила инерции: динамическое равновесие 441 13? 4 Угловая инерция 446 13? 5 Угловое динамическое равновесие 448 13? 6 Движение плоскости 451 Советы по решению проблем 457 Проблемы 458 Задачи на обзоре 470 14 Работа, энергия и сила 475 14? 1 Введение 475 14? 2 Работа постоянной силы 476 14? 3 Работа переменной силы 477 14? 4 Потенциальная и кинетическая энергия: поступательная 480 14? 5 Сохранение энергии: перевод 483 14? 6 Кинетическая энергия: угловая 486 14? 7 Сохранение энергии: угловой 489 14? 8 Сохранение энергии: движение плоскости 493 14? 9 Мощность и КПД 498 Советы по решению проблем 503 Проблемы 503 Проблемы на обзоре 521 15 Импульс и Импульс 525 15? 1 Линейный импульс и импульс 525 15? 2 Угловой импульс и импульс 527 15? 3 Сохранение импульса 530 Советы по решению проблем 537 Проблемы 538 Обзор задач 544 Ответы на проблемы 000 Индекс 000
Библиотека Конгресса США Тематические рубрики для этой публикации:
Механика, прикладная.
Компьютерные методы в прикладной механике и технике – Журнал
Разработка компьютерных методов для решения научных и инженерных задач, регулируемых законами механики было одним из величайших научных и инженерных достижений второй половины ХХ века, оказав огромное влияние на науку и технологии. Это достигается за счет передового математического моделирования и численных решений, отражающих комбинацию концепций, методов и принципов, которые часто являются междисциплинарными по своей природе и охватывают несколько областей механики, математики, информатики и других научных дисциплин.
Компьютерные методы в прикладной механике и технике Компания была основана более трех десятилетий назад, обеспечивая платформу для публикации статей в этой важной области науки и техники. Диапазон подходящих вкладов очень широк. Он охватывает любой тип вычислительных методов для моделирования сложных физических проблем, ведущих к анализу и проектированию инженерных изделий и систем. Это включает теоретическую разработку и рациональное применение математических моделей, вариационных формулировок и численных алгоритмов, связанных с методами конечных элементов, граничных элементов, конечных разностей, конечного объема и бессеточной дискретизации в следующих областях вычислительной науки и инженерии:
• Solid и Механика конструкций
• Механика жидкости
• Механика материалов
• Теплопередача
• Динамика
• Геомеханика
• Акустика
• Биомеханика
• Наномеханика
• Молекулярная динамика
• Квантовая механика
• Электромагнетизм,
, а также включает виртуальный дизайн, многомасштабные явления, от наномасштаба до макромасштаба, мультифизические задачи, параллельные вычисления, оптимизацию, вероятностные и стохастические c подходит.
CMAME публикует оригинальные статьи, находящиеся на переднем крае современных исследований, описывающие значительные достижения вычислительных методов в решении задач прикладной механики и инженерии.
Ученый (прикладная механика)
Номер заявки: 46434
Corning – один из ведущих мировых новаторов в области материаловедения. На протяжении более 160 лет Corning применяет свой непревзойденный опыт в области специального стекла, керамики и оптической физики для разработки продуктов, которые создали новые отрасли и изменили жизнь людей.
В Corning наш рост поддерживается стремлением к инновациям. Мы добиваемся успеха благодаря постоянным инвестициям в исследования и разработки, уникальному сочетанию инноваций в материалах и процессах, а также тесному сотрудничеству с клиентами для решения сложных технологических задач. Мы четырехкратный обладатель Национальной медали в области технологий благодаря нашему технологическому лидерству и научно-исследовательской среде, которая привлекает и способствует развитию лучших научных умов мира. Этот поток талантов уже более 160 лет приносит вам революционные инновации.
Профиль работы:
Эта должность предназначена для «ученого-исследователя – прикладная механика», который может использовать свои инженерные знания и фундаментальные знания для решения проблем с использованием моделирования и симуляции. Мы ищем сильных, динамичных и независимых людей с нестандартным мышлением, чтобы предлагать инновационные и рентабельные решения для продуктов и процессов. Применяйте численные методы для понимания физики, создания новых концепций и изучения вариантов дизайна для различных предприятий Corning.Кандидат будет тесно сотрудничать с руководителями проектов, экспериментаторами и другими специалистами в области моделирования, расположенными по всему миру.
Повседневные обязанности:
Требуемые навыки:
- Сильный опыт работы в области механики твердого тела и FEA. Глубокое понимание концепции и теории механики твердого тела.
- Опыт работы с коммерческим программным обеспечением FEA, включая, помимо прочего, ABAQUS, LS-DYNA, ANSYS Mechanical, MATLAB или Tecplot.
- Сильные аналитические, диагностические навыки и навыки решения проблем
- Опыт моделирования задач динамического удара, нелинейностей материалов.
- Очень хорошие коммуникативные навыки и сильная способность взаимодействовать с членами команды и клиентами.
- Способность понимать и разбивать проблемы реального мира на решаемые задачи моделирования.
- Хороший баланс между технической глубиной и широтой (т. Е. Гибкость и адаптируемость к различным технологическим областям).
- Целеустремленный, заинтересованный в долгосрочном техническом росте.
Образование и опыт:
Путешествие:
- Периодические поездки по всему миру для общения с людьми, занимающимися исследованиями, разработками, проектированием и производством.
Типовые проблемы системы шкивов Часть 1 – Инженерная механика – Решение по назначению
Инженерная механика – Динамика Глава 13 Используемые единицы: кН 103 Н = Дано: M 500 кг = с1 2.5 m = t1 1,5 s = g 9,81 м s2 = Решение: sa 2 ⎛⎜ ⎝ ⎞⎟ ⎠ t2 = a 2s1 t1 2 = a 2,222 м s2 = 2T M g− M a = TM a g + () 2 = T 3,008 кН = * Задача 13-8 Обрешетка массой М подвешена на тросе крана. Определите силу в кабеле в момент времени t, если ящик движется вверх с (a) постоянной скоростью v1 и (b) скоростью v = bt2 + c. Используемые единицы: кН 103 N = Дано: M 200 кг = t 2 s = v1 2 мс = b 0,2 м s3 = c 2 мс = Решение: a () a 0 м s2 = Ta M g – M a = Ta M g a + () = Ta 1,962 кН = 149 docsity.com Инженерная механика – Динамика Глава 13 b () vb t2 c + = a 2b t = Tb M g a + () = Tb 2.12 кН = Задача 13-9 Лифт E имеет массу ME, а противовес в A имеет массу MA. Если двигатель прикладывает постоянную силу F к кабелю в точке B, определите скорость лифта в момент времени t, начиная с состояния покоя. Пренебрегайте массой шкивов и троса. Используемые единицы: кН 103 N = Дано: ME 500 кг = MA 150 кг = F 5 кН = t 3 s = Решение: Предположения T 1 кН = a 1 м s2 = v 1 мс = Задано T MA g− MA− a = F T + ME g− ME a = vat = T av ⎛ ⎜ ⎜ ⎝ ⎞ ⎟ ⎟ ⎠ Найдите T a, v, () = T 1,11 кН = 2,41 м s2 = v 7,23 мс = 150 док.com Инженерная механика – Динамика Глава 13 Найдите время при vd d = k− mv = k− m 0 t t1 ⌠ ⎮ ⌡ d v0 0.5v0 v 1 v ⌠ ⎮ ⎮ ⌡ d = tmk ln v0 0.5v0 ⎛ ⎜ ⎝ ⎞ ⎟ ⎠ = tmk ln 2 () = t 0,693 mk = Найти расстояние avx vd d = k− mv = 0 x xk ⌠ ⎮ ⌡ d− v0 0.5v0 vm ⌠ ⎮ ⌡ d = xmk 0.5v0 () = x 0.5 m v0 k = Задача 13-13. Определите нормальную силу, которую ящик A массы M оказывает на гладкую тележку, если тележке дано ускорение a по плоскости. Кроме того, каково ускорение обрешетки? Дано: M 10 кг = a 2 м s2 = θ 30 deg = Решение: N M g− M− a () sin θ () = N M g a () sin θ () −⎡⎣ ⎤⎦ = N 88.1 N = acrate a () sin θ () = acrate 1 m s2 = Задача 13-14 Каждый из двух блоков имеет массу m. Коэффициент кинетического трения на всех соприкасающихся поверхностях равен μ. Если горизонтальная сила P перемещает нижний блок, определите ускорение нижнего блока в каждом случае. 153 docsity.com Инженерная механика – Динамика Глава 13 Решение: (a) Блок A: ΣFx = max; P 3μm g− m aA = aA P m 3μg− = b () SB SA + L = aA aB− = Блок A: ΣFx = max; P T− 3μm g− maA = Блок B: ΣFx = max; μm g T− maB = Одновременное решение aA P 2m 2μg− = Задача 13-15 Водитель пытается буксировать ящик, используя веревку, имеющую предел прочности на разрыв Tmax.Если ящик изначально находится в состоянии покоя и имеет вес W, определите максимальное ускорение, которое он может иметь, если коэффициент статического трения между ящиком и дорогой равен μs, а коэффициент кинетического трения – μk. 154 docsity.com Инженерная механика – Динамика Глава 13 Tmax 200 фунтов = W 500 фунтов = μs 0,4 = μk 0,3 = g 32,2 фута s2 = θ 30 градусов = Решение: Равновесие: для того, чтобы сдвинуть ящик, сила буксировки должна преодолевать статическое трение. Исходные предположения FN 100 фунтов = T 50 фунтов = Учитывая T cos θ () мкс FN− 0 = FN T sin θ () + W− 0 = FN T ⎛ ⎜ ⎝ ⎞ ⎟ ⎠ Найдите FN T, () = If T 187 .613 фунтов => Tmax 200 фунтов = тогда грузовик не сможет тянуть создание, не порвав трос. Если T 187,613 фунтов = Курс, префикс, номер и название: MT-341 Прикладная механика Часы (класс, декламация, лаборатория, студия): 3 часа занятий Кредиты: 3 Предварительные условия (при наличии): Нет Сопутствующие реквизиты (при наличии): PH-201 Описание курса в каталоге колледжа: Векторная трактовка статического равновесия частиц и твердых тел.Эквивалентные силовые и парные системы. Распределенные силовые системы. Применение основных аналитических методов к механическим устройствам и конструкциям. Центроиды, центр тяжести, моменты инерции. Трение и надвигающееся движение. Академические программы, для которых данный курс является обязательным или факультативным: A.A.S. Архитектурные технологии A.A.S. Технология машиностроения Результаты общего образования: Ниже приводится список результатов общего образования, поддерживаемых данным курсом. Используйте аналитические рассуждения для выявления вопросов или проблем и оценки доказательств для принятия обоснованных решений Количественное мышление, необходимое в различных областях интересов и в повседневной жизни Результаты обучения студентов по курсу: MT1-1 Анализируйте механические системы в математической среде на уровне алгебры и тригонометрии или выше. MT2-1 Применяйте основные законы механики к компонентам и конструкциям. Конкретные результаты программы Подготовка и продвижение по службе – выпускники продемонстрируют владение знаниями и навыками, необходимыми для поступления или продвижения в области технологии машиностроения. Другие результаты программы (если применимо). Интегрировать знания и навыки в программу обучения Методы оценки и оценки обучения студентов; описать типы используемых методов; отметьте, требуются ли определенные методы для всех разделов: Политика академической честности (факультет или колледж): MT-341 Прикладная механика
Инженерная компетенция – выпускники будут компетентными специалистами с навыками решения проблем и проектирования, а также будут иметь возможность применять математику, естественные науки и современное инженерное программное обеспечение для решения технических проблем в машиностроении.
Профессиональные навыки – выпускники будут обладать сильными коммуникативными навыками и способностью успешно работать в промышленных командах.
Перевод в колледж – выпускники будут соответствовать требованиям для перевода на младший год программы бакалавриата в области инженерных технологий.
Всестороннее образование – выпускники продемонстрируют уважение к разнообразию и знания современных профессиональных, социальных, этических и глобальных проблем, и они будут участвовать в обучении на протяжении всей жизни.
От всех студентов ожидается академическая честность. Любое нарушение академической честности воспринимается крайне серьезно.Все задания и проекты должны быть оригинальной работой студента или товарищей по команде. Плагиат недопустим. Любые вопросы относительно академической честности должны быть доведены до сведения преподавателя. Ниже приводится Политика Куинсборо общественного колледжа в отношении академической честности: “Официальная политика колледжа заключается в том, что обо всех действиях или попытках, которые являются нарушением академической честности, сообщать в Управление по делам студентов. На усмотрение преподавателя и с по согласованию с учащимся или учащимися, некоторые случаи, о которых сообщается в Управление по делам студентов, могут быть разрешены в рамках курса и факультета.Преподаватель имеет право корректировать оценку нарушителя по своему усмотрению, в том числе ставить F за задание или упражнение или, в более серьезных случаях, F студенту за весь курс ». Ознакомиться с политикой университета в отношении академической честности открывается в в новом окне (PDF).