
Решение задач по теории машин и механизмов (ТММ)
Примеры решения задач и выполнения курсового проекта по теории механизмов и машин (ТММ).
Заказать курсовую работу >
1 Исследование и проектирование плоских рычажных механизмов
Методы кинематического и кинетостатического анализов, а в значительной степени и методы синтеза механизмов, увязаны с их структурой, т. е. способом образования механизмов. Поэтому исследование рычажного механизма необходимо начинать со структурного анализа. Методы структурного, кинематического и силового исследования рассмотрим на конкретном примере, приведенном на рисунке 1.
Рисунок 1 – Кинематическая схема плоского рычажного механизма
1.1 Структурный анализ плоского механизма
1.2 Кинематическое исследование плоского механизма
Задачей кинематики механизмов является изучение движения звеньев вне зависимости от сил, действующих на эти звенья. Кинематический анализ считается законченным, если для каждого звена механизма определены положение, скорость и ускорение двух его точек (или положение, скорость и ускорение одной точки звена и угловая координата, угловые скорость и ускорение этого звена).
Названные задачи могут быть решены графическим, графоаналитическим и аналитическим методами.
Рассматривая эти векторные уравнения в проекциях на оси произвольно выбранной системы координат, получают систему алгебраических уравнений для определения перемещений звеньев механизма (угловых – для звеньев, совершающих вращательное движение, и линейных – для звеньев, двигающихся поступательно).
При выполнении курсового проекта по курсу теории механизмов и машин студенту необходимо с помощью ЭВМ определить перемещения, скорости и ускорения выходного звена (звено №5) для 24 положений механизма. Для этого, опираясь на изложенный выше принцип, записывают уравнения перемещений (угловых или линейных в зависимости от задания) выходного звена №5 как функцию угла поворота входного звена (звено №1).
Полученное уравнение (или ряд уравнений) перемещений вводят в ЭВМ. Дифференцирование уравнений для определения скоростей и ускорений выходного звена производится на ЭВМ на основе алгоритма графического дифференцирования.

1.2.5.1 Пример расчета механизма с поступательно движущимся выходным звеном
1.2.5.2 Пример расчета рычажного механизма с выходным звеном, совершающим вращательное движение
1.3 Силовой расчет плоского рычажного механизма
1.3.1 Определение сил и моментов сил инерции
1.3.2 Силовой расчет по методу Н.Г. Бруевича
1.3.3 Определение потерь мощности на трение в кинематических парах
1.3.4 Определение уравновешивающего момента методом Н.Е. Жуковского
2 Кинематический анализ и геометрический синтез зубчатого механизма
2.1 Кинематический анализ редуктора
2.2 Геометрический расчет пары зубчатых колес, нарезанных стандартным инструментом реечного типа
3 Динамический синтез кулачкового механизма
3.1 Построение графиков движения толкателя
3.2 Определение величины окружности минимального радиуса кулачка
Величина окружности минимального радиуса теоретического профиля кулачка для механизмов с роликовым толкателем определяется из условия отсутствия заклинивания, т. е. угол передачи движения не должен быть меньше заданного γmin.
е. угол передачи движения не должен быть меньше заданного γmin.
Для кулачкового механизма с поступательно движущимся толкателем, имеющим плоскую тарелку, величина окружности минимального радиуса кулачка определяется из условия выпуклости его профиля.
3.2.1 Кулачковый механизм с поступательно движущимся точечным или роликовым толкателем
3.2.2 Кулачковый механизм с коромысловым роликовым толкателем
3.2.3 Кулачковый механизм с поступательно движущимся плоским толкателем
3.3 Построение профиля кулачка
3.4 Определение усилия пружины, обеспечивающей силовое замыкание высшей пары
Лекции по ТММ >
МАШИН И МЕХАНИЗМОВ ТЕОРИЯ • Большая российская энциклопедия
В книжной версии
Том 19.
Скопировать библиографическую ссылку:
Авторы: В. Я. Солодилов
МАШИ́Н И МЕХАНИ́ЗМОВ ТЕО́РИЯ (ТММ), раздел машиноведения, изучающий методы исследования и проектирования машин и механизмов. ТММ тесно связана со многими науч. дисциплинами (математикой, теоретич. механикой, сопротивлением материалов и др.). При этом вопросы проектирования на всех этапах переплетаются с решением задач управления, информац. обеспечения и диагностики состояния машины или механизма. Методы ТММ являются общими практически для всех механизмов и машин.
Задачи ТММ очень разнообразны, важнейшие из них можно сгруппировать по трём разделам: кинематика механизмов, в т. ч. синтез механизмов; динамика механизмов и машин; теория машин-автоматов. Синтез механизмов заключается в выборе кинематич. схемы механизма и оптимизации её параметров, что является важнейшим этапом проектирования и расчёта, поскольку от правильного выбора схемы в значит. мере зависит обеспечение заданных условий функционирования машины, а также её производительность, надёжность и экономичность. Каждый механизм в зависимости от назначения и условий эксплуатации должен удовлетворять ряду требований, разнообразных по форме и содержанию. Всегда можно установить, какое требование является главным для правильной работы механизма, и в соответствии с этим выбрать осн. критерий, по которому оценивается его качество. Осн. критерий синтеза является функцией параметров механизма (называется также функцией-критерием или целевой функцией), остальные требования к нему формулируются в виде ограничивающих условий на параметры.
ч. синтез механизмов; динамика механизмов и машин; теория машин-автоматов. Синтез механизмов заключается в выборе кинематич. схемы механизма и оптимизации её параметров, что является важнейшим этапом проектирования и расчёта, поскольку от правильного выбора схемы в значит. мере зависит обеспечение заданных условий функционирования машины, а также её производительность, надёжность и экономичность. Каждый механизм в зависимости от назначения и условий эксплуатации должен удовлетворять ряду требований, разнообразных по форме и содержанию. Всегда можно установить, какое требование является главным для правильной работы механизма, и в соответствии с этим выбрать осн. критерий, по которому оценивается его качество. Осн. критерий синтеза является функцией параметров механизма (называется также функцией-критерием или целевой функцией), остальные требования к нему формулируются в виде ограничивающих условий на параметры.

С ростом нагруженности и быстроходности машин и повышением требований к их качеству значительно изменилось содержание задач динамики машин: появилась необходимость учитывать упругие свойства звеньев, зазоры в подвижных соединениях, переменность масс и моментов инерции и т. п. Учёт упругости звеньев в машинах позволил выявить колебат. движения в сложных кинематич. цепях и определить реальные нагрузки на звенья и кинематич. пары, дать рекомендации по демпфированию возникающих колебаний и методам предотвращения резонансов, решать задачи точности исполнения заданного закона движения механизма. Тенденцией развития машиностроения является повышение рабочих скоростей машин. Это приводит к увеличению динамич. нагрузок на звенья механизмов и рабочие органы машин, а также к росту уровня вибраций и порождаемого вибрацией шума.
Развитие теории машин-автоматов и систем автоматич. действия связано в осн. с совершенствованием методов построения схемы системы управления, определяющей согласованность движения исполнит. органов. Приоритетом является создание методов построения самонастраивающихся схем, в которых программа управления автоматически корректируется в соответствии с изменениями рабочего процесса. Также к теории машин-автоматов относится проектирование промышленных роботов и разработка механич. устройств мехатронных систем (см. Мехатроника).
Одной из важнейших задач ТММ является развитие эксперим. методов изучения характеристик машин и механизмов, их технич. диагностика. Исследования проводятся как на натурных объектах (в лабораториях, эксплуатац. условиях), так и методами математич. моделирования с использованием компьютеров; при этом особое значение приобретают исследования машин в условиях их производств. работы с автоматич. регистрацией и компьютерной обработкой полученной информации. Разработка методов технич. диагностики машин основана на выделении объективных критериев качества, определяющих работоспособность и одновременно признаки дефектных состояний механизмов.
работы с автоматич. регистрацией и компьютерной обработкой полученной информации. Разработка методов технич. диагностики машин основана на выделении объективных критериев качества, определяющих работоспособность и одновременно признаки дефектных состояний механизмов.
Историческая справка
Как наука ТММ начала формироваться в эпоху пром. революции 18 в., когда возникла необходимость в переходе от единичного и мелкосерийного произ-ва к машинному. Соответственно возросли требования к качеству технологич. оборудования и его производительности, потребовались квалифициров. специалисты для решения инж. задач. В 1794 в Париже Г. Монж основал первый технич. университет (Политехническую школу) и ввёл в курс начертательной геометрии раздел описания машин и их элементов, далее преобразованный в первый в истории инж.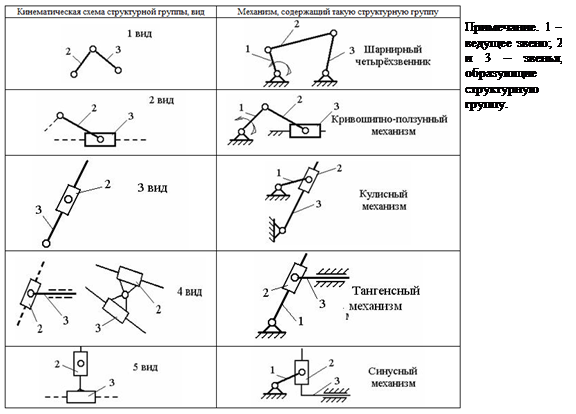 курс «Элементы машин», который объединял «Детали машин» и «Теорию механизмов». В 1808 в Париже А. Бетанкур и Х. М. Ланц (1762–1837), а в 1811 Ж. Ашетт (1769–1834) предложили первую классификацию механизмов, в основе которой лежало их разделение по функциональному признаку. В 1853 П. Л. Чебышев опубликовал статью «Теория механизмов, известных под именем параллелограммов», положившую начало циклу исследований по параметрич. оптимизации схем механизмов. Используя разработанные им методы, он изобрёл и спроектировал свыше 40 новых механизмов, осуществляющих заданные траектории движения, а структурная формула плоских рычажных механизмов получила назв. формулы Чебышева. В 1875 нем. учёный Ф. Рело (1829–1905) впервые дал определение кинематич. пары и разработал графич. метод синтеза сопряжённых профилей, известный как метод нормалей; он же написал ряд работ по структуре (строению) и кинематике механизмов.
курс «Элементы машин», который объединял «Детали машин» и «Теорию механизмов». В 1808 в Париже А. Бетанкур и Х. М. Ланц (1762–1837), а в 1811 Ж. Ашетт (1769–1834) предложили первую классификацию механизмов, в основе которой лежало их разделение по функциональному признаку. В 1853 П. Л. Чебышев опубликовал статью «Теория механизмов, известных под именем параллелограммов», положившую начало циклу исследований по параметрич. оптимизации схем механизмов. Используя разработанные им методы, он изобрёл и спроектировал свыше 40 новых механизмов, осуществляющих заданные траектории движения, а структурная формула плоских рычажных механизмов получила назв. формулы Чебышева. В 1875 нем. учёный Ф. Рело (1829–1905) впервые дал определение кинематич. пары и разработал графич. метод синтеза сопряжённых профилей, известный как метод нормалей; он же написал ряд работ по структуре (строению) и кинематике механизмов.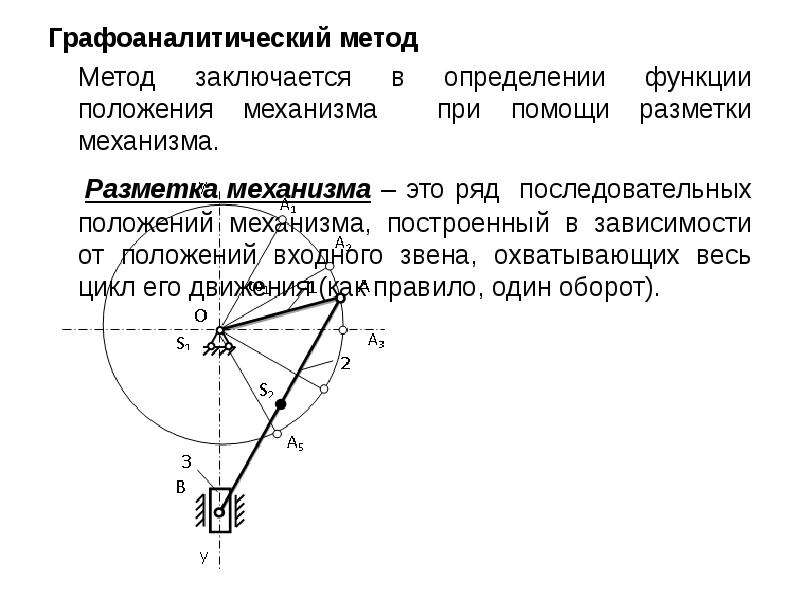 В 1886 рос. учёный Х. И. Гохман (1851–1916) одним из первых опубликовал исследование по аналитич. теории зацепления, в 1890 издал труд, ставший фундаментом для теории кинематич. пар. Значит. вклад в развитие динамики машин внёс Н. Е. Жуковский – автор целого ряда работ по прикладной механике и теории регулирования хода машин. В 1914 Л. В. Ассур открыл общую закономерность в структуре многозвенных плоских механизмов, и сейчас применяемую при их анализе и синтезе; он разработал также метод «особых точек» для кинематич. анализа сложных рычажных механизмов. Существенный вклад в становление механики машин как цельной теории машиностроения внёс И. И. Артоболевский – основоположник отеч. школы ТММ, автор многочисл. трудов и учебников, получивших всеобщее признание. Решение задач ТММ послужило основой для создания новых разделов разл. наук (напр., задача о регулировании хода машины положила начало теории автоматич.
В 1886 рос. учёный Х. И. Гохман (1851–1916) одним из первых опубликовал исследование по аналитич. теории зацепления, в 1890 издал труд, ставший фундаментом для теории кинематич. пар. Значит. вклад в развитие динамики машин внёс Н. Е. Жуковский – автор целого ряда работ по прикладной механике и теории регулирования хода машин. В 1914 Л. В. Ассур открыл общую закономерность в структуре многозвенных плоских механизмов, и сейчас применяемую при их анализе и синтезе; он разработал также метод «особых точек» для кинематич. анализа сложных рычажных механизмов. Существенный вклад в становление механики машин как цельной теории машиностроения внёс И. И. Артоболевский – основоположник отеч. школы ТММ, автор многочисл. трудов и учебников, получивших всеобщее признание. Решение задач ТММ послужило основой для создания новых разделов разл. наук (напр., задача о регулировании хода машины положила начало теории автоматич. регулирования). К кон. 20 в. ТММ эволюционировала от экспертной системы (анализа работоспособности механизма) к науке о разработке общих принципов проектирования механич. систем, обладающих сложными функциональными возможностями.
регулирования). К кон. 20 в. ТММ эволюционировала от экспертной системы (анализа работоспособности механизма) к науке о разработке общих принципов проектирования механич. систем, обладающих сложными функциональными возможностями.
Решение задач Задача 📝 ТММ Теория машин и механизмов
1. Сколько стоит помощь?
Цена, как известно, зависит от объёма, сложности и срочности. Особенностью «Всё сдал!» является то, что все заказчики работают со экспертами напрямую (без посредников). Поэтому цены в 2-3 раза ниже.
2. Каковы сроки?
Специалистам под силу выполнить как срочный заказ, так и сложный, требующий существенных временных затрат. Для каждой работы определяются оптимальные сроки. Например, помощь с курсовой работой – 5-7 дней. Сообщите нам ваши сроки, и мы выполним работу не позднее указанной даты. P.S.: наши эксперты всегда стараются выполнить работу раньше срока.
Для каждой работы определяются оптимальные сроки. Например, помощь с курсовой работой – 5-7 дней. Сообщите нам ваши сроки, и мы выполним работу не позднее указанной даты. P.S.: наши эксперты всегда стараются выполнить работу раньше срока.
3. Выполняете ли вы срочные заказы?
Да, у нас большой опыт выполнения срочных заказов.
4. Если потребуется доработка или дополнительная консультация, это бесплатно?
Да, доработки и консультации в рамках заказа бесплатны, и выполняются в максимально короткие сроки.
5. Я разместил заказ. Могу ли я не платить, если меня не устроит стоимость?
Да, конечно – оценка стоимости бесплатна и ни к чему вас не обязывает.
6. Каким способом можно произвести оплату?
Работу можно оплатить множеством способом: картой Visa / MasterCard, с баланса мобильного, в терминале, в салонах Евросеть / Связной, через Сбербанк и т.д.
7. Предоставляете ли вы гарантии на услуги?
На все виды услуг мы даем гарантию. Если эксперт не справится — мы вернём 100% суммы.
8. Какой у вас режим работы?
Мы принимаем заявки 7 дней в неделю, 24 часа в сутки.
Теория механизмов и машин – это.
 .. Что такое Теория механизмов и машин?
.. Что такое Теория механизмов и машин?Теория машин и механизмов (ТММ) — это научная дисциплина об общих методах исследования, построения, кинематики и динамики механизмов и машин и о научных основах их проектирования.
История развития дисциплины
В качестве самостоятельной научной дисциплины ТММ, как и многие другие прикладные разделы механики, возникла на волне промышленной революции, начало которой относится к 30-м годам XVIII столетия, хотя машины создавались задолго до этого, и простые механизмы (колесо, винтовая передача и др.) широко использовались ещё во времена Древнего Египта.
Глубокий научный подход в теории механизмов и машин начал широко применяться с начала XIX века. Весь предшествующий период развития техники можно рассматривать как период эмпирического создания машин, на протяжении которого делались изобретения большого количества простых машин и механизмов, среди которых:
Теория механизмов и машин в своём развитии опиралась на важнейшие физические законы — закон сохранения энергии, законы Амонтона и Кулона для определения сил трения, золотое правило механики и др. В ТММ широко используются законы, теоремы и методы теоретической механики. Важное значение для данной дисциплины имеют: понятие передаточного отношения, основы теории эвольвентного зацепления и др.
В ТММ широко используются законы, теоремы и методы теоретической механики. Важное значение для данной дисциплины имеют: понятие передаточного отношения, основы теории эвольвентного зацепления и др.
Можно отметить роль, которую сыграли в создании предпосылок для развития ТММ, следующие учёные: Л. Эйлер, Леонардо да Винчи, Дж. Кардано, Д. Ватт, Г. Амонтон, Ш. Кулон.
Одним из основоположников теории механизмов и машин считается Пафнутий Чебышев (1812-1894), который во второй половине XIX века опубликовал серию важнейших работ, посвящённых анализу и синтезу механизмов. Одно из его изобретений — механизм Чебышева.
В XIX веке развиваются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Г. Кориолис), классификация механизмов по функции преобразования движения (Г. Монж), решается задача расчёта маховика (Ж. В. Понселе) и др. Были написаны первые научные монографии по механике машин (Р. Виллис, А. Бориньи), читаются первые курсы лекций по ТММ, выходят первые учебники (А. Бетанкур, Д. С. Чижов, Ю. Вейсбах).
Во второй половине XIX столетия публикуются работы немецкого учёного Ф. Рёло, в которых вводятся важные понятия кинематической пары, кинематической цепи и кинематической схемы.
Основные понятия
Машина — технический объект, состоящий из взаимосвязанных функциональных частей (узлов, устройств, механизмов и др.), предназначенный для получения или преобразования механической энергии с целью выполнения возложенных на него функций.
Механизм — система взаимосвязанных тел, предназначенных для преобразования движения одного или нескольких тел в требуемое движение других тел. Механизм составляет основу большинства машин.
Твёрдое тело, входящее в состав механизма, называется звеном. Звено может состоять из одной или нескольких неподвижно соединённых деталей.
Соединение звеньев, допускающее их относительное движение, называется кинематической парой. Наиболее распространённые кинематические пары: цилиндрический шарнир; шаровой шарнир; ползун и направляющая; винтовая передача. На рисунках приведены условные трёхмерные обозначения типовых кинематических пар для построения пространственных кинематических схем механизмов согласно ISO 3952 [1].
Цилиндрический шарнир
Ползун и направляющая
Винтовая пара
Сферический шарнир
При построении механизма звенья соединяются в кинематические цепи. Другими словами, механизм – это кинематическая цепь, в состав которой входит неподвижной звено (стойка или корпус (основание)), число степеней свободы которого равняется числу обобщённых координат, характеризующих положения звеньев относительно стойки. Движение звеньев рассматривается по отношению к неподвижному звену – стойке (корпусу, основанию).
Задачи дисциплины
Теория механизмов и машин решает следующие задачи:
- анализ механизмов, то есть описание движения, кинематический и динамический анализ существующих и разрабатываемых механизмов;
- синтез механизмов, то есть проектирование структуры и геометрии механизмов на основе заданных кинематических и динамических характеристик;
- задачи теории машин-автоматов, рассматривающей вопросы построения схем автоматических машин, исходя из условий согласованной работы отдельных механизмов, и достижения оптимальной продуктивности, точности и надёжности машин-автоматов.
Структура дисциплины
- Структура механизмов и машин.
- Геометрия механизмов и их элементов.
- Кинематика механизмов.
- Динамика машин и механизмов.
Современное состояние дисциплины
Литература
Примечания
- ↑ ISO 3952 Kinematic diagrams – Graphical symbols
Ссылки
Всероссийская студенческая олимпиада по теории механизмов и машин
С 10 по 11 ноября в ИжГТУ имени М. Т. Калашникова прошел третий (заключительный) этап Всероссийской студенческой олимпиады по теории механизмов и машин.
Студенческие команды девяти российских вузов из Ижевска, Самары, Москвы, Чебоксар, Уфы, Омска, Набережных Челнов соревновались за право называться лучшими в одной из фундаментальных физико-математических дисциплин, которая является основой современной техники. Уже не впервые олимпиада проходит в стенах ИжГТУ именно 10 ноября, в день рождения выдающегося конструктора Михаила Калашникова, имя которого носит университет. Случайно так получается или нет, но в таком совпадении существует некая символика. Об этом на открытии олимпиады говорили и проректор ИжГТУ по международной деятельности и аккредитации Александр Еленский, и заведующий кафедрой “Теоретическая механика и теория машин и механизмов” ИжГТУ Николай Кузнецов.
– Для “оборонки” теория машин и механизмов – основополагающий фундамент знаний, – подчеркнул в своем обращении к участникам олимпиады Николай Павлович Кузнецов. – Неудивительно, что среди вас сегодня – представители оборонных вузов, авиационных, транспортных университетов. Сейчас, когда российская оборонная промышленность находится на подъеме, необходимы грамотные специалисты, способные обеспечивать обороноспособность нашей страны. А это прежде всего – ваши знания и ваши умения. Вы – будущая элита этих знаний.
Приветственное письмо в адрес участников, а также ректора ИжГТУ имени М. Т. Калашникова Бориса Якимовича и заведующего кафедрой “Теоретическая механика и теория машин и механизмов” Николая Кузнецова, от главы комитета по образованию Международной федерации по теории механизмов и машин (IFToMM) Хуана Карлоса Гарсиа Прада зачитал доцент кафедры “Теоретическая механика и теория машин и механизмов” ИжГТУ Эдуард Крылов .
“Уважаемые коллеги! От имени постоянного комитета IFToMM по образованию я желаю успешного проведения олимпиады по теории механизмов и машин. Ваш университет, ИжГТУ имени М.Т. Калашникова, является примером для других университетов, поскольку уже не в первый раз проводит всероссийскую олимпиаду по теории механизмов и машин, которая служит площадкой по обмену достижениями в области этой науки. Мы рассматриваем ИжГТУ в качестве мирового лидера в проведении соревнования такого уровня. Отвечая запросам общества и в целях прогресса человечества, мы все должны готовить специалистов – инженеров высочайшего класса, способных рационально использовать имеющиеся ресурсы для получения наилучших результатов…
И я приглашаю вас всех, все команды из России, принять участие в международной олимпиаде, которая будет проходить в октябре 2016 года в Мадридском университете имени Карлоса III. “
После открытия олимпиады ее участники сразу же приступили к действию: за четыре часа им предстояло решить восемь задач. Требовательное жюри в составе преподавателей – руководителей команд должно было выбрать победителей в командном зачете и личном. Задача, возможно, и не из области теории механизмов и машин, но тоже не из простых. Поэтому после подсчета всех баллов командам и отдельным “игрокам” предоставляется право на апелляцию, и победители окончательно определяются спустя сутки после решения олимпиадных задач.
Участники команд, не участвующих в апелляциях, тоже не скучали. Хотя ноябрьская погода в столице Удмуртии, возможно, и не располагает к изучению ее достопримечательностей, все же гости нашего города побывали в музеях, зоопарке, съездили в дом-музей П. И. Чайковского. Поскольку, по подсчетам наших экспертов, всероссийская олимпиада проходит в стенах ИжГТУ уже в восьмой раз, у ее организаторов, преподавателей и сотрудников кафедры “Теоретическая механика и теория машин и механизмов”, большой опыт проведения событий такого масштаба, в том числе и опыт гостеприимства.
И вот результаты объявлены. Насколько они казались ожидаемыми или неожиданными, знает лишь строгое жюри в составе руководителей команд, которые тщательно изучали и разбирали решение каждой задачи.
Личное первенство:
1 место – Александр Лушников, Московский государственный технический университет имени Н. Э. Баумана
2 место – Екатерина Галкина, Самарский государственный аэрокосмический университет имени академика С. П. Королёва (национальный исследовательский университет)
3 место – Максим Ижутов, Московский государственный технический университет имени Н. Э. Баумана
4 место – Никита Дмитриев, Чувашский государственный университет имени И. Н. Ульянова,
5 место – Олег Пилипов, Самарский государственный аэрокосмический университет имени академика С. П. Королёва (национальный исследовательский университет)
5 место – Роман Попов, Ижевский государственный технический университет имени М. Т. Калашникова
6 место – Никита Николаев, Самарский государственный аэрокосмический университет имени академика С. П. Королёва (национальный исследовательский университет)
7 место – Павел Данилов, Чувашский государственный университет имени И. Н. Ульянова
7 место – Кирилл Долганов, Ижевский государственный технический университет имени М. Т. Калашникова
7 место – Андрей Ефимов, Чувашский государственный университет имени И. Н. Ульянова
7 место – Дмитрий Красноперов, Ижевский государственный технический университет имени М. Т. Калашникова
Командное первенство:
1 место – Московский государственный технический университет имени Н. Э. Баумана (60,3 балла)
2 место – Чувашский государственный университет имени И. Н. Ульянова (53,1балл)
2 место – Ижевский государственный технический университет имени М. Т. Калашникова (50,5 баллов)
2 место – Самарский государственный аэрокосмический университет имени академика С. П. Королёва (национальный исследовательский университет) (47,7 баллов)
3 место – Самарский государственный аэрокосмический университет имени академика С. П. Королёва (вторая команда) (35,9 баллов)
3 место – Уфимский государственный авиационный технический университет (30,6 баллов)
4 место – Самарский государственный университет путей сообщения (16,3 балла)
5 место – Московский государственный машиностроительный университет (МАМИ) (9,1 балла)
5 место – Омский автобронетанковый инженерный институт (филиал) Военной академии материально-технического обеспечения имени генерала армии А. В. Хрулева (8 баллов)
Мнения и впечатления
Комментируя итоги олимпиады на вручении дипломов и призов, заведующий кафедрой “Теоретическая механика и теория машин и механизмов” ИжГТУ Николай Павлович Кузнецов объяснил наличие нескольких призовых мест:
– На предыдущих олимпиадах, совещаясь, мы долго решали, как оценивать ваши итоги, особенно командные. Потому что многие из вас идут, как говорится, “ноздря в ноздрю”, с отличием на одну десятую балла. И в этом году, после многолетнего обсуждения, мы поддались мнению руководителей команд и стали оценивать результаты более системно. Мы присвоили командам несколько вторых и третьих мест.
Что еще мне понравилось в этой олимпиаде? Наконец-то я увидел, что многие из вас в решении задач отдают предпочтения динамике. Я считаю, что для инженеров динамике – самое главное. Может быть, со мной кто-то не согласится, но для меня это интегральная характеристика любого инженера. И мне радостно, что именно те ребята, которые сумели решить задачи по динамике, и стали победителями нашей олимпиады.
Руководитель команды Уфимского государственного авиационного технического университета, доцент кафедры “Основы конструирования механизмов и машин” УГАТУ Сергей Сергеевич Прокшин вместе со своими студентами – впервые на олимпиаде в ИжГТУ. За плечами у уфимской команды – участие и победы в московских и санкт-петербургских олимпиадах, поэтому свои результаты в этом состязании команду слегка разочаровали.
– Вообще-то мы привыкли к хорошим местам, поэтому тут мы немножечко удручены. Но сказать, что я разочарован, конечно, не могу. Мы понимаем, что в этот раз мы немного не добрали, но это не последняя олимпиада. Следующая вроде бы будет проходить в Москве. Вот там мы им дадим!
А если серьезно, то сегодня далеко не каждый вуз может сформировать достойную команду и выставить ее так, чтобы она была потенциальным победителем. Проблема и в финансировании, и в перегруженности преподавателей. Все занимаются со студентами, готовя их к олимпиаде, на уровне экспромта, выкраивая свободное время. И расчет в основном, конечно, на одаренных студентах – а они везде есть, конечно, и уж тем более в нашем авиационном университете, и их немало.
– Сергей Сергеевич, даже если вы ожидали решительной победы здесь, на этой олимпиаде, и этого не случилось – возможно, такое даже полезно иногда, это не дает расслабляться?
– Это точно. Я даже подтверждаю это событиями международного масштаба. Все страны, которые проиграли Вторую мировую войну, развиваются более интенсивно, чем Россия и Советский Союз. Так что поражение – это тоже этап, в течение которого люди, государство, я не боюсь высоких слов, получают команду на повышение своего потенциала. И если они эту команду правильно понимают, все хорошо кончается. Если нет, то отставание неизбежно.
– Вы – член жюри, разбирающий решение задач участниками олимпиады. Как вы оцениваете их уровень?
– Конечно, в целом уровень меня не устраивает. Это безусловно. Мы видели очень много работ, где было только начало решения, без проникновения в суть дела. Думаю, что по всем задачам картина примерно такая же. Конечно, нам хотелось бы видеть блестящие решения! Но… в этот раз не слишком-то все блестело.
Николай Петрович Петров, руководитель команды Чувашского государственного университета имени И. Н. Ульянова, вместе с командой студентов своего вуза – практически постоянный участник всероссийских олимпиад по теории механизмов и машин, проходящих в ИжГТУ.
– Николай Петрович, вы как-то отслеживаете судьбы своих выпускников – участников олимпиад?
– Конечно! У нас в университете существует студенческая научная секция “Механика машин” – в этом году ей исполняется 20 лет. Среди ее выпускников есть и рядовые конструкторы, и технические директора предприятий, и даже министр экономики и промышленности Чувашии. И я постоянно спрашиваю у наших выпускников, которые занимались у нас: а вы не жалеете о потерянном времени? В то время, когда на улице солнце, щебечут птички, ходят красивые девушки, вы сидите и занимаетесь. Они говорят: нет! Перед отъездом сюда, в Ижевск, ко мне приходили ребята, которые разрабатывают на предприятии автоматические линии. Они говорят, что знания, полученные на наших занятиях, им очень сильно помогают. Старшие коллеги спрашивают: откуда вы это знаете? Даже мы, бывалые конструкторы, не знаем, а вы знаете. Мы говорим, что много занимались дополнительно.
Екатерина Галкина (одна из двух девушек во всех девяти командах!), студентка, уже дипломница Самарского государственного аэрокосмического университета имени академика С. П. Королёва (идет, конечно же, на красный диплом!), заняла второе место в личном первенстве. В Ижевске Катя уже второй раз – в прошлом году она тоже приезжала на олимпиаду по теории механизмов и машин. Команда СГАУ имени М. Т. Королева заняла в 2014-м году первое место.
– Екатерина, насколько сложными были для вас задачи этого года?
– Я бы не сказала, что они были очень сложными – может быть, даже проще тех, что мы решаем в университете, на курсах подготовки к олимпиаде.
– Вы учитесь на факультете летательных аппаратов, в этом году заканчиваете университет. Куда вы пойдете работать – с красным дипломом, блестящими знаниями, участием в олимпиадах?
– У нас в Самаре есть предприятие “Прогресс”, которое занимается разработкой ракет-носителей и космических аппаратов. Так что пока собираюсь работать там.
– Время, проведенное на олимпиадах – вы не жалеете о нем? Подготовки, поездки – все это в ущерб веселой студенческой жизни.
– Конечно, нет! Во-первых, это поездки – есть возможность посмотреть что-то новое. Во-вторых, новые знакомства. Команда меняется практически каждый год, появляются новые участники. У меня очень много знакомых, в том числе и благодаря олимпиадам. И так получается, что среди моих знакомых больше мальчиков, чем девочек.
Дмитрий Лапицкий, студент Уфимского государственного авиационного технического университета, участвовал в олимпиаде в Ижевске впервые.
– Требования и критерии оценки были очень жесткими. Наша команда была среди тех, что подавали апелляцию. Ее отклонили, но все четко объяснили, поэтому претензий у нас нет. И я считаю, что именно эти жесткие критерии проверки показывают, насколько много внимания уделяется мелочам. Как при решении задач, так, возможно, и в дальнейшем, при расчетах каких-то ответственных узлов, деталей. Также мы обратили внимание на то, каие темы сегодня наиболее актуальны, какие знания оцениваются больше всего.
…Олимпиада завершилась, победители и участники получили дипломы, сертификаты и подарки. Поздравить можно каждого ее участника: принять участие во Всероссийской олимпиаде по такой сложной дисциплине, как “теория механизмов и машин” – уже победа для каждого, кто удостоился такой возможности. Проигравших здесь нет. Есть – динамичное движение вперед, к новым задачам и новым решениям.
ФГБОУ ВПО “ИжГТУ имени М.Т. Калашникова”
Инженерный институт Теория механизмов и машин
Новосибирский государственный
аграрный университет
Задания и методические указания
по выполнению контрольных работ
Новосибирск 2011
УДК 621.01
ББК 34.41
Кафедра теоретической и прикладной механики
Составитель канд. техн. наук, доц. Ю.И. Евдокимов
Рецензент канд. техн. наук, доц. П.И. Федюнин
Теория механизмов и машин: задания и метод. указания по выполнению контр. работ/ Новосиб. гос. аграр. ун-т. Инженер. ин-т; сост. Ю.И Евдокимов.– Новосибирск, 2011. – 44 с.
Методическая разработка содержит задания для двух контрольных работ по теории механизмов и машин. Задания охватывают основные разделы курса: структурное, кинематическое и силовое исследование плоских рычажных механизмов, а также кинематический анализ многоступенчатых зубчатых передач. Приводятся примеры выполнения каждой задачи контрольных работ.
Предназначена для студентов инженерных специальностей.
Утверждена и рекомендована к изданию методическим советом Инженерного института (протокол № 10 от 11 ноября 2010 г.).
Новосибирский государственный аграрный университет, 2011
Введение
Основной целью изучения дисциплины «Теория механизмов и машин» является приобретение теоретических знаний общих свойств большого разнообразия механизмов, входящих в состав машин, применяемых в сельскохозяйственном и другом производстве.
Самостоятельное решение задач, поставленных в контрольных работах по теории механизмов и машин, закрепляет теоретические знания и способствует лучшему усвоению дисциплины и использованию теории на практике.
Настоящая методическая разработка соответствует программе по дисциплине «Теория механизмов и машин» для инженерно-технических специальностей высших учебных заведений и содержит задачи для двух контрольных работ.
При определении некоторых параметров исходных данных для решения задач следует учитывать величину коэффициента N, размерность которого совпадает с размерностью определяемого параметра исходных данных. Величина коэффициентаN зависит от года поступления студента в институт и выбирается из таблицы 0.
Таблица 0 Значения коэффициента N
Год поступления | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
Значение N | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 10 |
Выбор номера варианта задач контрольных работ производится по двум последним цифрам условного шифра, т. е. номера зачётной книжки студента.
1. Содержание и объём контрольной работы 1
Контрольная работа 1 включает в себя задачи 1 и 2.
1.1. Задача 1. Структурный анализ плоского рычажного механизма
Исходные данные
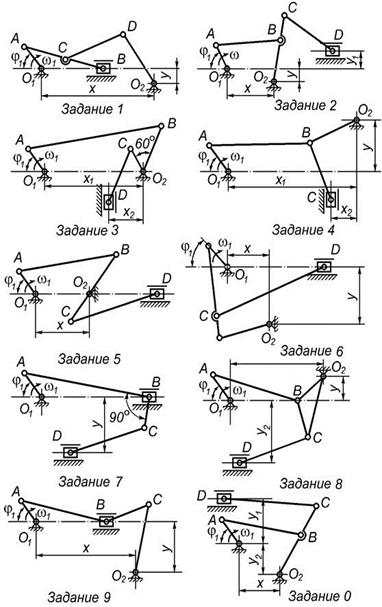
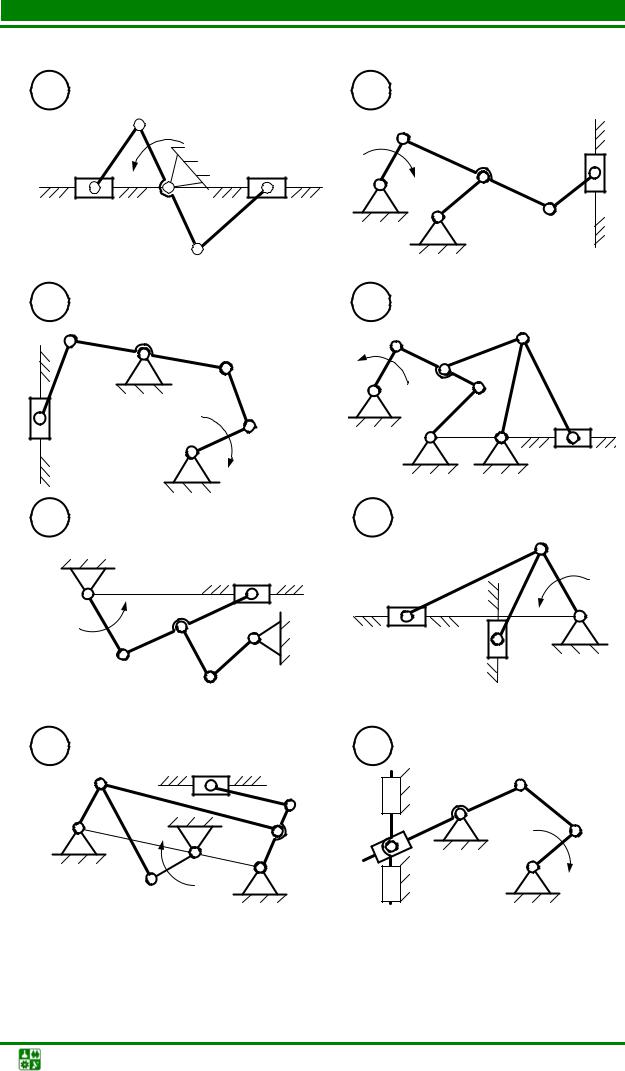
В качестве исходных данных предлагаются структурные схемы плоских рычажных механизмов, изображённые на рисунке 1.1. Выбор номера варианта схемы механизма следует производить по последней цифреномера зачётной книжки студента.
Необходимо выполнить следующее:
Ознакомиться с заданной схемой механизма, выявить стойку, входное, выходное и промежуточные звенья. Изобразить структурную схему механизма без соблюдения масштаба, пронумеровать все звенья (стойку обозначить цифрой 0), обозначить все кинематические пары прописными буквами (О, А, В, С…).
Установить виды движения звеньев относительно стойки (абсолютные) и виды движения относительно друг друга. Составить таблицу кинематических пар, в которой указать номера звеньев, образующих каждую пару, название каждой пары и число её степеней свободы.
Найти число степеней свободы механизма по формуле П.Л. Чебышева.
Выделить начальное звено 1 и стойку 0, изобразив их отдельно.
Оставшуюся кинематическую цепь разложить на структурные группы (группы Ассура), изобразив их отдельно. Указать класс и вид каждой структурной группы.
Рисунок 1. 1 – Структурные схемы плоских рычажных механизмов
к задаче 1
Учебники, дополнительная и справочная литература
Артоболевский И. И. Теория механизмов и машин.
Кроме традиционных разделов (теории структуры, кинематики, кинетостатики, динамики и синтеза механизмов) в учебник вошли вопросы теории машин-автоматов, роботов и манипуляторов, сведения об управлении машинами.
Для студентов механических и машиностроительных специальностей втузов.
Артоболевский И. И. Теория механизмов и машин: Учебник для втузов. -4-е изд., перераб. и доп. -М.: Наука. Гл. ред. физ.-мат. лит., 1988. -640 с.
скачать (12.3 MБ)
Фролов К. В., Попов С. А., Мусатов А. К., Лукичев Д. М. и др. Теория механизмов и машин.
Учебник состоит из двух разделов, в I разделе (гл 2-10) изложены общие методы определения кинематических и динамических характеристик механизмов, машин и систем машин, во II разделе (гл 11-18) – методы проектирования схем основных видов механизмов, управление движением системы механизмов Изложение дано на основе графических и графоаналитических методов определения параметров механизмов, а также аналитических с использованием ЭВМ.
Теория механизмов и машин:Учебник для втузов/К. В. Фролов, С. А. Попов, А. К. Мусатов и др.; Под ред. К. В. Фролова.-М.: Высш. шк., 1987.-496 с: ил.
скачать (12.3 MБ)
Левитский Н. И. Курс теории механизмов и машии.
В учебнике изложены методы анализа и синтеза механизмов и машин. Во 2-е издание (1-е в 1978 г.) введен материал по теории колебаний и виброзащиты машин, аналитическому решению задач синтеза механизмов с помощью ЭВМ, теории манипуляторов и построению систем управления машин-автоматов; расширен раздел динамики машин.
Левитский Н. И. Курс теории механизмов и машии: Учеб. пособие для мех. спец. вузов. —2-е изд., перераб. и доп. — М.: Высш. шк., 1985. —279 с, ил.
скачать (2.7 MБ)
Артоболевский И. И., Эдельштейн Б. В.Сборник задач по теории механизмов и машин.
Сборник содержит 386 типовых задач по теории механизмов и машин и соответствует программе, утвержденной Министерством высшего и специального среднего образования СССР. В сборник включены задачи по теории структуры механизмов, кинематике, кинетостатике и динамике механизмов с высшими и низшими нарами.
Сборник предназначен для студентов машиностроительных, механических и приборостроительных специальностей, изучающих курс теории механизмов и машин. Каждый раздел задачника снабжен кратким методическим введением с примерами решения типовых задач, что облегчает использование сборника студентами заочных факультетов.
Сборник задач по теории механизмов и машин. Артоболевский И. И. и Эдельштейн Б. В. Главная редакция физико-математической литературы издательства «Наука», 1973, 256 стр.
скачать (3.3 MБ)
Артоболевский И. И. Механизмы в современной технике. Справочное пособие. В 7 томах.
Т.I: Элементы механизмов. Простейшие рычажные и шарнирно-рычажные механизмы.- 496 с.
Т.II: Кулисно-рычажные и крипошипно-ползунные механизмы.- 560 с.
Т.III: Рычажно-кулачковые, рычажно-зубчатые, рычажно-храповые, рычажно-клиновые и винто-рычажные механизмы. Механизмы с гибкими и упругими звеньями. – 416 с.
Т.IV: Зубчатые механизмы. – 592 с.
Т.V: Кулачковые и фрикционные механизмы. Механизмы с гибкими звеньями.- 400 с.
Т.VI-VII: Электрические механизмы. Гидравлические и пневматические механизмы.- 784 с.
Артоболевский И. И. Механизмы в современной технике. Справочное пособие. В 7 томах. 2-е изд., переработанное.- М.: «Наука». Главная редакция физико-математической литературы, 1979.
скачать (41.7 MБ)
Крайнев А. Ф. Словарь-справочник по механизмам
Приведены термины, обозначения, схемы механизмов и их элементов, а также сведения о взаимодействии элементов, параметрах и характеристиках механизмов, принципах проектирования схем и выборе конструктивных решений. Дано около 2000 схем механизмов.
Второе издание (1-е изд. 1981 г.) переработано и дополнено сведениями о современных механизмах, используемых в автоматических системах, роботах, приводных, передаточных и исполнительных устройствах.
Для инженерно-технических работников, студентов и преподавателей вузов, экспертов патентных организаций и изобретателей.
Крайнев А. Ф. Словарь-справочник по механизмам.- 2-е изд., перераб. и доп.-М.:Машиностроение,1987.-560 с, ил.
скачать (8.1 MБ)
Кожевников С. Н., Есипенко Я. И., Раскин Я. М. Механизмы. Справочник
Книга содержит описание около 2000 механизмов и их элементов, применяющихся в современных машинах различных отраслей промышленности. В основу расположения материала положена преимущественно функциональная классификация механизмов. Для многих механизмов приведены в окончательном виде расчетные формулы, облегчающие проектирование. Книга может служить справочным руководством для инженерно-технических работников заводов, технологических и проектных институтов, а также может быть полезной для студентов при проектировании механизмов и машин.
Кожевников С. Н., Есипенко Я. И., Раскин Я. М. Механизмы. Справочник. Изд. 4-е, перераб. и доп. Под ред. С. Н. Кожевникова М., «Машиностроение», 1976.
скачать (27.4 MБ)
Кореняко А. С. и др. Курсовое проектирование по теории механизмов и машин
В предлагаемой книге кратко изложены основные теоретические вопросы курса теории механизмов и машин и даны кинематические схемы 29 заданий по курсовому проекту из различных областей машиностроения с краткими указаниями к ним.
Для ознакомления студентов с общей схемой и последовательностью проектирования, а также с методикой исследования и расчета механизмов в конце книги помещены подробно разработанные в расчетной части и графическом оформлении три типовых проекта механизмов двигателя и рабочей машины. Руководство по курсовому проектированию составлено в соответствии с программами машиностроительных и механических специальностей втузов и предназначено в качестве учебного пособия для студентов этих втузов. Оно также может быть использовано инженерно-техническими работниками конструкторских бюро промышленных предприятий и проектных организаций.
Кореняко А. С. и др. Курсовое проектирование по теории механизмов и машин. «Вища школа», 1970, 332 стр.
скачать (6.5 MБ)
Тимофеев Г. А. Теория механизмов и машин
Изложены основы теории механизмов и машин (ТММ), изучены свойства отдельных типов механизмов, широко применяемых в самых разных машинах, приборах и устройствах; рассматриваются задачи совершенствования современной техники, создания новых высокопроизводительных машин и систем, освобождающих человека от трудоемких процессов. ТММ базируется на методах математического анализа, векторной и линейной алгебры, дифференциальной геометрии и других разделов математики, поэтому курс лекций рассчитан на студентов, уже имеющих подготовку по высшей математике, теоретической механике, векторной алгебре, информатике и др.
Содержание соответствует Государственному образовательному стандарту высшего профессионального образования и методическим требованиям, предъявляемым к учебным изданиям.
Для студентов высших технических учебных заведений. Теория механизмов и машин: курс лекций / Г. А. Тимофеев. – М.: Высшее образование, 2009. – 352 с. – (Основы наук)
скачать (3.2 MБ)
Плахтин В.Д., Бороздина Е.И., Ивочкин М.Ю. Теория механизмов и машин
Учебное пособие содержит основные положения теории и методов кинематического и силового анализа плоских механизмов. Оно включает также задания на курсовой проект по соответствующим разделам, методику, примеры выполнения разделов курсового проекта и методические указания к оформлению проекта.
Пособие предназначено для студентов механических и машиностроительных специальностей и соответствует программе курса «Теория механизмов и машин» по разделам кинематического и силового анализа механизмов.
Теория механизмов и машин. Кинематический и силовой анализ плоских механизмов. Основы теории. Курсовое проектирование: Учеб. пособие. – М.: Изд-во МГОУ, 2009. -ISBN 978-5-7045-0825-0.
скачать (1.2 MБ)
Плахтин В.Д., Пантюшин Б.Д. Теория механизмов и машин
Учебное пособие содержит основные положения теории и методов кинематического и силового анализа плоских механизмов. Оно включает также задания на курсовой проект по соответствующим разделам, методику, примеры выполнения разделов курсового проекта и методические указания к оформлению проекта.
Пособие предназначено для студентов механических и машиностроительных специальностей и соответствует программе курса «Теория механизмов и машин» по разделам кинематического и силового анализа механизмов.
Теория механизмов и машин. Кинематический и силовой анализ плоских механизмов. Основы теории. Курсовое проектирование: Учеб. пособие. – М.: Изд-во МГОУ, 2009. -ISBN 978-5-7045-0825-0.
скачать (1.2 MБ)
Гуляев К.И., Заморуев Г.Б., Зискиндович В.А. Расчет геометрии эвольвентной цилиндрической зубчатой передачи внешнего зацепления
На основе известных свойств эвольвенты проводится анализ геометрических и качественных особенностей цилиндрической эвольвентной зубчатой передачи внешнего зацепления, зубчатые колеса которой нарезаны инструментом реечного типа. Выводятся формулы расчета ее геометрических параметров и размеров. Выбор коэффициентов смешения рекомендуется по так называемым блокирующим контурам с учетом желательных качественных показателей передачи.
Пособие предназначено для студентов IV-VII семестров механико-машиностроительного, энергомашиностроительного, электромеханического, физико-металлургического, а также вечернего, заочного факультетов, слушающих курсы «Теория механизмов и машин». «Теория механизмов и машин и детали машин». Пособие может быть полезно также студентам старших курсов машиностроительных специальностей и инженерно-техническим работникам института, соприкасающимся по роду своей деятельности с проектированием зубчатых передач.
Термины, определения и обозначения соответствуют ГОСТ 16530-70 и ГОСТ 16531-70, а расчет геометрии зубчатой передачи – ГОСТ 16532-70.
скачать (1.5 MБ)
Анурьев В. И. Справочник конструктора-машиностроителя
В первом томе приведены общетехнические сведения, справочные данные по материалам, шероховатости поверхности, допускам и посадкам, предельным отклонениям формы и расположения поверхностей, конструктивным элементам деталей, крепежным изделиям, стандартизованным и нормализованным деталям и узлам.
Во втором томе приведены современные справочные сведения по расчету и конструкциям осей, валов, подшипников скольжения и качения, муфт, зубчатых, червячных, винтовых, цепных, плоско- и клиноременных передач, храповых зацеплений и разъемных соединений.
В третьем томе приведены справочные сведения по расчету и конструированию неразъемных соединений, пружин, уплотнительных устройств, трубопроводов и арматуры, смазочных, гидравлических и пневматических устройств Рассмотрены смазочные материалы, приборы, встраиваемые в оборудование, редукторы, мотор-редукторы, электродвигатели.
Восьмое издание (7-е изд. 1992 г.) переработано в соответствии с новыми ГОСТами и нормативно-технической документацией, дополнено сведениями по защитно-декоративным покрытиям металлов и пластмасс, зарубежными аналогами некоторых конструкционных материалов. Предназначен для инженеров и техников-конструкторов.
Анурьев В. И.Справочник конструктора-машиностроителя: В 3 т.- 8-е изд., перераб. и доп. Под ред. И. Н. Жестковой. – М.: Машиностроение, 2001.
скачать (33.4 MБ)
Иванов М. Н. Детали машин
Учебник соответствует программе курса «Детали машин». В каждом разделе приводятся контрольные вопросы для самоподготовки и примеры, помогающие освоить методику расчетов и разрабатывать программы таких расчетов. Справочный материал учебника соответствует требованиям Госстандарта по состоянию на 01.01.2002 г.
Для студентов машиностроительных и механических специальностей втузов.
Детали машин: Учебник для машиностроительных специальностей вузов/М. Н. Иванов, В. А. Финогенов 8-е изд., испр. – М.: Высш. шк., 2003. – 408 с: ил.
скачать (66.2 MБ)
Иванов М. Н. Детали машин
Учебник соответствует программе курса «Детали машин». В каждом разделе приводятся контрольные вопросы для самоподготовки и примеры, помогающие освоить методику расчетов и разрабатывать программы таких расчетов. Справочный материал учебника соответствует требованиям Госстандарта по состоянию на 01.01.2003 г.
Для студентов машиностроительных и механических специальностей втузов.
Детали машин. Учебник для машиностроительных специальностей вузов/М. Н. Иванов, В. А. Финогенов – 10-е изд., испр. – М.: Высш. шк., 2006. – 408 с: ил.
скачать (6.6 MБ)
Дунаев П. Ф. Конструирование узлов и деталей машин
В книге изложена методика расчета и конструирования узлов и деталей машин общемашиностроительного применения. Рекомендации по конструированию сопровождаются анализом условий работы узлов и деталей их обработки и сборки. Приведены методические указания по выполнению чертежей типовых деталей машин, правила оформления учебной конструкторской документации; дан анализ результатов расчета передач на ЭВМ и рекомендации по выбору варианта для конструктивной проработки; учтены изменения в методике расчета зубчатых и червячных передач, валов, подшипников качения, планетарных и волновых передач при конструировании корпусных деталей и др.
Для студентов технических специальностей вузов. Учебное пособие может быть полезно преподавателям, работникам конструкторских отделов предприятий, проектных и научно-исследовательских организаций.
Конструирование узлов и деталей машин: Учеб. пособие для студ. техн спец. вузов / П.Ф. Дунаев, О.П.Леликов. – 8-е изд., перераб. и доп. – М.. Издательский центр «Академия». 2003. – 496 с.
скачать (5.7 MБ)
Теория машин и механизмов | J. Mech. Des.
Теория механизмов Джона Дж. Уикера, Гордона Р. Пеннок и Джозефа Э. Шигли, 3-е издание. Оксфорд Пресс, 2003
Стипендия покойного Джозефа Шигли продолжает влиять на образование в области проектирования машин почти через десять лет после его смерти в 1994 году путем публикации новых изданий его книг Теория машин и механизмов (Oxford Press) с проф.Уикер и Пеннок, а также его Engineering Design (McGraw-Hill) с профессором Мишке. Теория машин и механизмов восходит к интеграции работ профессора Шигли «Кинематический анализ механизмов » и «Динамический анализ машин » в единую книгу «Теория машин » в 1961 году. Джон Юикер работал с профессором Шигли над второе издание 1995 г., которое включало анализ пространственных механизмов и роботов с использованием векторных формулировок, адаптированных для численных вычислений.В этом третьем издании Гордон Пеннок вместе с профессором Юкером представил новый впечатляющий вид этому классическому тексту. Книга разделена на три основные части: кинематика и механизмы, конструкция механизмов и динамика машин. В первой части основное внимание уделяется анализу механического движения, и мне нравится формулировка вектора и матрицы, которая включает кинематические коэффициенты, потому что она обеспечивает удобный переход к анализу пространственных механизмов и роботов. Также тщательно представлены графические и сложные векторные подходы, которые хорошо адаптированы для изучения плоских механизмов.Вторая часть представляет собой обзор кулачков, зубчатых передач и рычагов, а также кинематики робота. В третьей части представлен анализ сил, вибрации и балансировки ряда систем машин, включая двигатели, маховики, регуляторы и гироскопы. В этой книге меня больше всего беспокоит то, что в прошлом теория машин обязательно фокусировалась на скорости, ускорении и силах в устройстве в одной конкретной конфигурации, в то время как значение этих параметров во всем движении представляет интерес. Проф.Программа Uicker Integrated Mechanisms (IMP), созданная еще в 1964 году, была одной из первых программных систем для моделирования машин, а профессор Пеннок является ведущим исследователем в области анализа роботов и пространственных связей. Я надеюсь, что их будущие выпуски будут продвигаться в направлении демонстрации студентам, как анализировать и моделировать движение машинных систем с помощью компьютеров, доступных большинству инженеров. В любом случае, эта книга представляет собой превосходное изложение теории машин с глубиной и широтой, которая может найти применение в курсах, начиная от студенческого обзора теории машин до продвинутого студенческого или даже магистерского курса по кинематике и динамике машин.Практикующие инженеры сочтут эту книгу ценным справочником по принципам теории машин.
Калифорнийский университет, Ирвин
(PDF) Введение в теорию машин
Колледж инженерии и технологий Браун-Хиллз Кинематика машин
Подготовил: Сачин Чатурведи Асст. Профессор, машиностроение 1
Введение: механизмы и машины, кинематические звенья, кинематические пары, кинематические цепи, плоскость
и космический механизм, кинематическая инверсия, эквивалентные связи, четырехзвенные плоские механизмы, подвижность
и диапазон движения, прямая линия механизмы, рулевые механизмы, пантограф,
проблемы.
Введение: Теория машин может быть определена как отрасль инженерной науки
, которая занимается изучением относительного движения между различными частями
машины и сил, действующих на них. Знание этого предмета очень важно для
инженера при проектировании различных частей машины.
Классификация теории машин по следующим четырем направлениям:
1. Кинематика: занимается относительным движением между различными частями машин.
2. Динамика: имеет дело с силами и их воздействием, воздействуя на детали машины в движении
.
3. Кинетика: имеет дело с силами инерции, которые возникают в результате комбинированного воздействия массы
и движения частей машины.
4. Статика: работает с силами и их воздействием, когда части машины находятся в покое. Считается, что массой
частей можно пренебречь.
Механизмы – это комбинация жестких или ограничивающих частей или корпусов, из которых
собирается машина, это делается путем фиксации одной из частей, а относительное движение других частей
определяется по отношению к фиксированная часть.Пример: кривошипно-шатунный механизм, используемый в двигателе внутреннего сгорания
или поршневом воздушном компрессоре, где вращательное движение кривошипа
преобразуется через шатун в возвратно-поступательное движение ползуна, или
наоборот. Фиг показывает; Link-1 – фиксированный, Link-2 – это кривошип, Link-3 – это шатун, а Link-4 – это поршень
, который скользит в цилиндре. Однако термин «связь» широко использовался как синоним
слова «механизм».
Машина представляет собой комбинацию механизмов, которая получает энергию и преобразует ее в
некоторую полезную работу, от которой мы сокращаем человеческие усилия. Машина состоит из
частей или корпусов.
Кинематическая связь
Каждая часть машины, которая движется относительно какой-либо другой части, называется кинематической связью.
Звено может состоять из нескольких частей, которые жестко скреплены между собой, так что
они не перемещаются относительно другой части.Например, в поршневом паровом двигателе поршень, шток поршня
и крейцкопф составляют одно звено; шатун с большим и малым концевыми подшипниками
составляет второе звено; кривошип, коленчатый вал и маховик – третье звено, а цилиндр, двигатель
, рамаи коренные подшипники – четвертое звено.
Типы звеньев
1. Жесткое звено: жесткое звено не подвергается деформации при передаче движения
.
Теория машин и механизмов, 4-е издание: Джон Джозеф Уикер, Гордон Пеннок, Джозельф Шигли: Твердый переплет: 9780195371239: Книги Пауэлла
Теория машин и механизмов обеспечивает основу для изучения смещений, скоростей, ускорений, а также статических и динамических сил требуется для правильной конструкции механических рычагов, кулачков и зубчатых систем.Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных и независимых технических подходов, существующих в области механизмов, кинематики и динамики. Этот текст, который сейчас полностью переработан в своем четвертом издании, идеально подходит для студентов старших курсов или аспирантов в области машиностроения, которые изучают кинематику и / или динамику машин.Характеристики
Предлагает сбалансированное покрытие всех тем как графическими, так и аналитическими методами
Охватывает все основные аналитические подходы
Включает введение в кинематические коэффициенты, которые четко отделяют кинематические (геометрические) эффекты от рабочей скорости и других динамических зависимостей – и унифицирует охват связей с этими коэффициентами для кулачков и зубчатых систем
Предоставляет графические решения для упражнений, которые теперь выполняются профессиональным программным обеспечением САПР с точностью выше одного процента
Новое в этой редакции
Включает больше проработанных примеров во всем и новые и обновленные домашние задания в конце главы
Предлагает новый материал по синтезу и теории кривизны и обобщает некоторые темы (главы 7, 8 и 9 теперь представляют собой одну главу, а главы 21, 22 и 23 теперь являются одна глава)
Две новые главы: Глава 5 посвящена планарным связям с несколькими степенями свободы и в главе 14 обсуждается динамический анализ сил.
Дополнения
Текстовый компакт-диск включает анимацию рабочих моделей ключевых концепций из книги, чтобы помочь студентам визуализировать и понимать материал.
Компакт-диск инструктора включает слайды с рисунками из текста и решения на основе PowerPoint работал в MatLabRG над некоторыми домашними заданиями из книги
Сопутствующий веб-сайт (http: // www.oup.com/us/uickerd) предоставляет дополнительную информацию и ресурсы.
Теория машин и механизмов обеспечивает основу для изучения перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильной конструкции механических рычагов, кулачков и зубчатых колес. системы. Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных и независимых технических подходов, существующих в области механизмов, кинематики и динамики.Охват всех методов анализа и разработки сбалансирован, с использованием как аналитических, так и графических инструментов. Этот текст идеально подходит для студентов старших курсов или аспирантов, изучающих машиностроение, изучающих курс кинематики и / или динамики машин. Характеристики
Включает введение в кинематические коэффициенты, которое четко отделяет кинематические (геометрические) эффекты от рабочей скорости и других динамических зависимостей и объединяет охват рычажных механизмов с охватом кулачков и зубчатых передач
Содержит совершенно новые главы о анализ и проектирование маховиков, регуляторов и гироскопов
Предоставляет графические и аналитические решения для упражнений, теперь проверенные профессиональным программным обеспечением САПР с точностью выше одного процента
Предлагает новые качественные иллюстрации, теперь в двух цветах
Руководство по решениям и PowerPoint «Накладные расходы, доступные только для пользователей
Пересмотренное 4-е издание включает больше проработанных примеров по всему тексту, а также новые и обновленные домашние задания в конце главы. Некоторые темы были сокращены (главы 7, 8 и 9 теперь представляют собой одну главу; главы 21, 22 и 23 теперь представляют собой одну главу), и добавлен материал по синтезу и теории кривизны. Есть новая глава 5 о плоских связях с несколькими степенями свободы, а глава 14 – совершенно новая.
Текстовый компакт-диск включает анимированные рабочие модели ключевых понятий из книги, чтобы помочь студентам визуализировать и осмыслить материал. Компакт-диск инструктора включает в себя слайды с рисунками из текста в формате PowerPoint и решения, разработанные в MatLab для выбранных домашних заданий из книги, разработанные, чтобы предоставить преподавателям учебные ресурсы, если они захотят интегрировать MatLab в свой курс.
Теория машин и механизмов предоставляет текст для полного исследования перемещений, скоростей, ускорений, а также статических и динамических сил, необходимых для правильного проектирования механических рычагов, кулачков и зубчатых систем.Авторы представляют основу, обозначения и номенклатуру, необходимые студентам для понимания различных независимых технических подходов, существующих в области механизмов, кинематики и динамики.В настоящее время полностью переработано в своем четвертом издании, этот текст идеально подходит для студентов старших курсов или аспирантов в области машиностроения, которые изучают кинематику и / или динамику машин.
Новое в четвертом издании
* Включает больше проработанных примеров и множество новых и обновленных домашних заданий в конце главы
* Охват косозубых, конических, червячных и червячных передач теперь интегрирован в одна глава
* Материал по плоскому и пространственному динамическому анализу сил теперь объединен в единую главу
* Добавлена совершенно новая глава, посвященная анализу плоских связей с несколькими степенями свободы
* Глава по кинематическому синтезу был значительно расширен и теперь включает в себя три и четыре графических метода точного позиционирования.
* Глава, посвященная статическому анализу сил, была расширена и теперь включает описание потери устойчивости двухсиловых элементов с осевой нагрузкой при сжатии
Дополнения
* Текстовый компакт-диск включает в себя анимацию многих фигур из текста на Рабочей модели, чтобы помочь студентам визуализировать и понять свое движение
* Дополнительный веб-сайт для инструкторов (www.oup.com/us/uicker) предоставляет дополнительную информацию и ресурсы, включая слайды с рисунками из текста в формате PowerPoint.
Джон Дж. Юикер-младший – профессор машиностроения в Университете Висконсина в Мэдисоне. Его педагогические и исследовательские специальности – твердотельное геометрическое моделирование, моделирование механических движений и их применение в автоматизированном проектировании и производстве. Он получил докторскую степень. получил степень бакалавра машиностроения в Северо-Западном университете и поступил на факультет Висконсинского университета в 1967 году.Уикер – один из основателей Совета США по теории машин и механизмов. Несколько лет он работал главным редактором журнала «Теория механизмов и машин».Гордон Р. Пеннок – доцент кафедры машиностроения в Университете Пердью, Западный Лафайет, Индиана. Его педагогический опыт в основном связан с проектированием машин. Его исследовательские специальности – теоретическая кинематика и динамика механического движения. Он применил свои исследования к робототехнике, вращающемуся оборудованию и биомеханике, включая кинематику и динамику шарнирно-сочлененных механических систем с твердым телом.
Получил докторскую степень. степень в области машиностроения Калифорнийского университета в Дэвисе. С момента прихода на факультет Университета Пердью в 1983 году он работал в нескольких национальных комитетах и международных программных комитетах. Он является советником студенческой секции Американского общества инженеров-механиков (ASME) в Университете Пердью, председателем по связям с колледжами региона VI, старшим представителем комитета студенческой секции и членом Совета по делам студентов. Он также является сотрудником отдела двигателей внутреннего сгорания, ASME, и с 1993 по 1997 год занимал должность председателя технического комитета по механическому проектированию Отделения двигателей внутреннего сгорания.Он является членом Американского общества инженеров-механиков.
Джозеф Э. Шигли (умер в мае 1994 г.) был почетным профессором машиностроения в Мичиганском университете и членом Американского общества инженеров-механиков. Он получил награду Комитета по механизмам, медаль Вустера Рида Уорнера и премию за дизайн машин. Он был автором восьми книг, в том числе «Проектирование машиностроения» (совместно с Чарльзом Р. Мишке) и «Прикладная механика материалов». Он также был главным соредактором Стандартного справочника по проектированию машин.Впервые он написал «Кинематический анализ механизмов» в 1958 году и «Динамический анализ машин» в 1961 году. Эти тексты были опубликованы в едином томе под названием «Теория машин» в 1961 году и с течением времени эволюционировали в нынешний текст «Теория машин и механизмов», который теперь в редакции. Третье издание.
СОДЕРЖАНИЕПредисловие
Об авторах
Часть 1 Кинематика и механизмы
1 Мир механизмов
1.1 Введение
1.2 Анализ и синтез
1.3 Наука о механике
1.4 Терминология, определения и допущения
1.5 Плоские, сферические и пространственные механизмы
1.6 Мобильность
1.7 Классификация механизмов
1.8 Кинематическая инверсия
1.9 Закон Грасгофа
1.10000 Механическое преимущество
1.10000
Задачи
2 Положение и смещение
2.1 Географическое положение движущейся точки
2.2 Положение точки
2.3 Разница положений между двумя точками
2.4 Кажущееся положение точки
2.5 Абсолютное положение точки
2.6 Уравнение замыкания контура
2.7 Графический анализ положения
2.8 Алгебраический анализ положения
2.9 Комплексно-алгебраические решения плоских векторных уравнений
2.10 Комплексные полярные Алгебра
2.11 Решения Чейза для плоских векторных уравнений
2.12 Методы анализа положения
2.13 Генерация соединительной кривой
2.14 Смещение движущейся точки
2.15 Разница смещения между двумя точками
2.16 Вращение и перемещение
2.17 Кажущееся смещение
2.18 Абсолютное смещение
2.19 Кажущееся угловое смещение
Проблемы
3 Скорость
3.1 Определение скорости вращения тела
3.3 Разница скоростей между точками твердого тела
3.4 Графические методы; Полигоны скорости
3.5 Кажущаяся скорость точки в подвижной системе координат
3.6 Кажущаяся угловая скорость
3.7 Прямой контакт и контакт качения
3.8 Систематическая стратегия для анализа скорости
3.9 Аналитические методы
3.10 Методы комплексной алгебры
3.11 Векторный метод
3.12 Метод кинематических коэффициентов
мгновенных
Центр скорости3.14 Теорема Аронхолда-Кеннеди о трех центрах
3.15 Обнаружение мгновенных центров скорости
3.16 Анализ скорости с использованием мгновенных центров
3.17 Теорема об угловом соотношении скоростей
3.18 Взаимосвязь между кинематическими коэффициентами первого порядка и мгновенными центрами
3.19 Теорема Фрейденштейна
3.20 Показатели достоинства; Mechanical Advantage
3.21 Centrodes
Проблемы
4 Ускорение
4.1 Определение ускорения
4.2 Угловое ускорение
4.3 Разница в ускорении между точками твердого тела
4.4 многоугольника ускорения
4.5 Видимое ускорение точки в подвижной системе координат
4.6 Видимое угловое ускорение
4.7 Прямой контакт и подвижный контакт
4.8 Систематическая стратегия для анализа ускорения
4.9 Аналитические методы
4.10 Комплексные алгебраические методы
4.11 Решения Чейса
4.12 Метод кинематических коэффициентов
4.13 Уравнение Эйлера-Савари
4.14 Конструкции Bobillier
4.15 Мгновенный центр ускорения
4.16 Круг Бресса (или круг де Ла Хира)
4.17 Радиус кривизны точечной траектории с использованием кинематических коэффициентов
4.18 Кубик стационарной кривизны
Задачи 5 Планарные связи с несколькими степенями свободы
5.1 Введение
5.2 Анализ положения; Алгебраическое решение
5.3 Графические методы; Полигоны скорости
5.4 мгновенных центра скорости
5.5 Кинематические коэффициенты первого порядка
5.6 Метод наложения
5.7 Графический метод; Полигоны ускорения
5.8 Кинематические коэффициенты второго порядка
5.9 Кривизна траектории точки соединения
5.10 Метод конечных разностей
Задачи
Часть 2 Конструкция механизмов
6 Введение в конструкцию кулачков 9000 6,2000
6 Классификация кулачков и повторителей
6.3 Диаграммы перемещений
6.4 Графическое изображение профилей кулачков
6.5 Кинематические коэффициенты движения толкателя
6.6 Высокоскоростные кулачки
6.7 Стандартные движения кулачков
6.8 Согласование производных диаграмм перемещений
6.9 Кулачок с перекладыванием пластин Торцевой толкатель
6.10 Кулачок с роликовым толкателем
Проблемы
7 Цилиндрические зубчатые колеса
7.1 Терминология и определения
7.2 Основной закон зубчатой передачи
7.3 Эвольвентные свойства
7.4 Сменные шестерни; Стандарты AGMA
7.5 Основы работы зубчатых колес
7.6 Изготовление зубьев шестерни
7.7 Помехи и подрезание
7,8 Коэффициент контакта
7,9 Изменение межцентрового расстояния
7,10 Инволютометрия
7,11 Проблемы с зубьями
7,11
8 Цилиндрические, конические, червячные и червячные передачи
8.1 Параллельно-осевые косозубые шестерни
8.2 Соотношение зубьев косозубой шестерни
8.3 Пропорции зубьев косозубой шестерни
8.4 Контакт зубьев косозубой шестерни
8.5 Замена цилиндрических зубчатых колес на косозубые
8.6 Шестерни с елочкой
8,7 косозубые шестерни
8.8 Прямозубые конические шестерни
8.9 Пропорции зубьев конических шестерен
8.10 Венечные и торцевые шестерни
8.11 Спиральные конические шестерни
8.12 гипоидных передач
8.13 Червячные и червячные передачи
Проблемы
9 зубчатых передач
9.1 Параллельно-осевые зубчатые передачи
9.2 Примеры зубчатых передач
9.3 Определение номеров зубьев
9.4 Epicyclic Эпициклические зубчатые передачи
9.6 Анализ планетарных зубчатых передач по формуле
9.7 Табличный анализ планетарных зубчатых передач
9.8 Лето и дифференциалы
9.9 Полноприводная передача
Проблемы
10 Синтез рычагов
10.1 Тип, количество и размерный синтез
10.2 Генерация функций, создание траектории и управление телом
10.3 Два конечных положения жесткого тела (N = 2)
10,4 Три конечно разделенных положения твердого тела (N = 3)
10,5 Четыре конечно разделенных положения твердого тела (N = 4)
10,6 Пять конечно разделенных положений твердого тела (N = 5)
10.7 позиций точности; Структурная ошибка; Чебычевский интервал
10.8 Метод наложения
10.9 Синтез кривой-ответвителя
10.10 Когнитивные связи; Теорема Робертса-Чебычева
10.11 Уравнение Фрейденштейна
10.12 Аналитический синтез с использованием комплексной алгебры
10.13 Синтез механизмов задержки
10.14 Прерывистое вращательное движение
Задачи
11 Пространственные механизмы 110005
Введение
9000.2 Исключения для мобильности механизмов11.3 Задача пространственного анализа положения
11.4 Анализ пространственной скорости и ускорения
11,5 Углы Эйлера
11.6 Параметры Денавита-Хартенберга
11.7 Матричный анализ положения матрицы преобразования
9000 и анализ ускорения11.9 Компьютерные программы для анализа обобщенного механизма
Проблемы
12 Робототехника
12.1 Введение
12.2 Топологическое расположение манипуляторов роботов
12.3 Прямая кинематика
12.4 Анализ обратного положения
12.5 Анализ обратной скорости и ускорения
12.6 Анализ сил привода робота
Проблемы динамики
Проблемы динамики 13 Анализ статических сил
13.1 Введение
13.2 Законы Ньютона
13.3 Системы единиц
13.4 Приложенные и ограничивающие силы
13,5 Диаграммы свободного тела
13,6 Условия равновесия
13,7 Элементы с двумя и тремя усилиями
13,8 Элементы с четырьмя силами
13,9 Модели силы трения
13.10 Анализ статических сил с трением
13.11 Анализ сил прямозубых и косозубых зубчатых колес
13.12 Анализ сил прямозубых и конических зубчатых колес
13.13 Метод виртуальной работы
13,14 Формула столбца Эйлера
13.15 Критическая удельная нагрузка
13.16 Критическая удельная нагрузка и коэффициент гибкости
13.17 Параболическое уравнение Джонсона
Задачи
14 Анализ динамических сил
14.1 Введение
14.2 Центроиды и центры масс
14.3 Массовые моменты и продукты инерции
14.4 Силы инерции и принцип Даламбера
14.5 Принцип суперпозиции
14.6 Плоское вращение вокруг фиксированного центра
14.7 Силы и моменты сотрясения
14.8 Комплексный алгебраический подход
14.9 Уравнение движения на основе уравнения мощности
14.10 Измерение массового момента инерции
14.11 Преобразование осей инерции
14.12 Уравнения движения Эйлера
14,13 Импульс 14.14 Угловой импульс и угловой момент
Задачи
15 Анализ вибрации
15.1 Дифференциальные уравнения движения
15.2 Вертикальная модель
15.3 Решение дифференциального уравнения
15.4 Форсирование ступенчатого входа
15.5 Фазовая плоскость
15.6 Анализ фазовой плоскости
15.7 Переходные возмущения
15,8 Свободная вибрация с обнаружением вязкого демпфирования
экспериментально15.10 Представление затухающей вибрации в фазовой плоскости
15.11 Реакция на периодическое воздействие
15.12 Гармоническое воздействие
15.13 Форсирование, вызванное дисбалансом
15.14 Относительное движение
15,15 Изоляция
15,16 Метод Рэлея
15,17 Первая и вторая критические скорости вала
15,18 Торсионные системы
Проблемы
c 16 Типы двигателей
c 16 Динамика двигателей 2
16.2 Диаграммы индикаторов
16.3 Динамический анализ, общий
16.4 Газовые нагрузки
16,5 Эквивалентные массы
16.6 Сил инерции
16.7 Нагрузки на подшипники в одноцилиндровом двигателе
16,8 Крутящий момент на коленчатом валу
16.9 Встряхивающие силы двигателей
16.10 Подсказки по вычислениям
Задачи
17 Балансировка
17,1 Статическая дисбаланс
17.3 Статические балансировочные станки
17.4 Динамический дисбаланс
17.5 Анализ дисбаланса
17.6 Динамическая балансировка
17.7 Балансировочные станки
17.8 Балансировка поля с помощью программируемого калькулятора
17.9 Балансировка одноцилиндрового двигателя
17.10 Балансировка многоцилиндровых двигателей
17.11 Аналитический метод балансировки многоцилиндровых двигателей
17.12 Балансировка рычагов
17.13 Балансировка машин
Проблемы18 Cam Dynamics
18.1 Кулачковые системы с жестким и упругим корпусом
18.2 Анализ эксцентрикового кулачка
18.3 Влияние трения скольжения
18.4 Анализ дискового кулачка с толкателем возвратно-поступательного ролика
18.5 Анализ упругих кулачковых систем
18.6 Дисбаланс, скачок пружины и раскрутка
Проблемы
19 Маховики, регуляторы и гироскопы
19.1 Динамическая теория интеграции
Методика
19.3 Суммирование крутящего момента многоцилиндрового двигателя
19.4 Классификация регуляторов
19.5 Центробежные регуляторы
19.6 Инерционные регуляторы
19.7 Механические системы управления
19.8 Стандартные входные функции
19.9 Решение линейных дифференциальных уравнений
19.10 Анализ систем обратной связи с пропорциональной погрешностью
19.11 Введение в гироскопы
19.12 Движение гироскопа
19.13 Стабильная или регулярная прецессия
19.14 Принудительная прецессия
ПроблемыПРИЛОЖЕНИЯ
Приложение A: Таблицы
Таблица 1 Стандартные префиксы СИ
Таблица 2 Преобразование из стандартных единиц СИ в единицы СИ
Таблица 3 Преобразование единиц СИ
в обычные единицы СШАТаблица 4 Свойства областей
Таблица 5 Массовые моменты инерции
Таблица 6 Эвольвентная функция
Приложение B: Ответы на отдельные проблемы
Указатель
Глава 2.Механизмы и простые машины
Yi Zhangс
Susan Finger
Stephannie Behrens
Содержание
Механизм : основные физические или химические процессы участвует или несет ответственность за действие, реакцию или другое естественное явление.
Станок : сборка деталей, передающих силы, движение и энергия заранее определенным образом.
Простая машина : любой из различных элементарных механизмов, имеющих элементы, из которых состоят все машины.Включен в К этой категории относятся рычаг, колесо и ось, шкив, наклонная плоскость, клин и винт.
Слово механизм имеет много значений. В кинематике механизм является средством передача, управление или ограничение относительного движения (Хант 78). Движения, которые с электрическим, магнитным и пневматическим управлением исключены из понятие механизма. Центральная тема механизмов – жесткость. тела соединены между собой суставами.
Станок представляет собой комбинацию жестких или устойчивых корпусов, сформированы и связаны таким образом, что они движутся с определенными относительными движениями и передать силу от источника энергии к сопротивлению, которое будет превосходить. У машины две функции: передача определенного родственника движение и передающая сила. Эти функции требуют силы и жесткость для передачи сил.
Термин механизм применяется к комбинации геометрические тела, составляющие машину или часть машины.А механизм , следовательно, можно определить как комбинацию жесткие или прочные тела, сформированные и соединенные таким образом, что они перемещаются с определенные относительные движения относительно друг друга (Ham et al. 58).
Хотя по-настоящему твердого тела не существует, многие инженеры компоненты жесткие, потому что их деформации и искажения ничтожно малы по сравнению с их относительными перемещениями.
сходство между станками и механизмами составляет что
- они обе комбинации твердых тел
- относительное движение между твердыми телами определено.
Разница между машиной и механизмом составляет машины преобразуют энергию для выполнения работы, а механизмы – нет. обязательно выполнять эту функцию. Срок машины в основном имеется в виду машины и механизмы. Рисунок 2-1 показывает изображение основной части дизельного двигателя. В Механизм его частей цилиндро-звено-кривошип – кривошипно-шатунный механизм механизм , как показано на Рисунке 2-2.
Рисунок 2-1 Поперечное сечение силового цилиндр в дизельном двигателе
Рисунок 2-2 Контур скелета
2.1 Наклонная плоскость
На рис. 2-3а показан наклонный плоскость , AB – основание, BC – высота и AC наклонный самолет . При использовании наклонной плоскости заданное сопротивление может преодолевать с меньшей силой, чем если бы самолет не использовался. Для Например, на рис. 2-3b предположим, что мы хотим поднять вес 1000 фунтов через вертикальное расстояние BC = 2 фута. Если это груз поднимался вертикально и без использования наклонных самолет силой 1000 фунтов.пришлось бы проявить на расстоянии ДО Н.Э. Если, однако, используется наклонная плоскость и груз перемещается над его наклонной плоскостью переменного тока сила всего 2/3 от 1000 фунтов или 667 фунтов. фунт необходим, хотя эта сила действует на расстоянии AC что больше расстояния BC.
Рисунок 2-3 Наклонная плоскость
Использование наклонной плоскости требует меньшего усилия через большее расстояние, чтобы выполнить определенный объем работы.
Пусть F представляет силу, необходимую для подъема данного веса на наклонная плоскость и W поднимаемый груз, имеем пропорцию:
(2-1)2.1.1 Винтовой домкрат
Одно из наиболее распространенных применений принципа наклонной плоскости – винт домкрат , который используется для преодоления сильного давления или подъема тяжелый вес W с гораздо меньшей силой F , приложенной на рукоять. R представляет длину ручки, а P шаг винта, или расстояние увеличивается за один полный оборот.
Рисунок 2-4 Винтовой домкрат
Пренебрегая трением, используется следующее правило: Сила F умноженное на расстояние, которое он проходит за один полный оборот равна поднятому весу, умноженному на расстояние, на которое он подняли в то же время.За один полный оборот конец ручки описывает круг с окружностью 2 R . Это расстояние, на котором действует сила F .
Поэтому из правила выше
(2–2)а также
(2-3)Предположим, что R равен 18 дюймов, P равен 1/8 дюйма, а вес для подъема равняется 100000 фунтов, тогда усилие, требуемое при F тогда составляет 110 фунтов. Это означает, что без учета трения 110 фунтов при F поднимет 100 000 фунтов.на W , но вес поднялся движется намного медленнее, чем сила, приложенная к точке F .
2,2 Шестерни
Шестерня или зубчатое колесо во время работы может быть рассматривается как рычаг с дополнительной функцией, что он может вращаться непрерывно, вместо того, чтобы раскачиваться взад и вперед через короткий расстояние. Одно из основных соотношений шестеренки – это число зубьев, диаметра и скорости вращения шестерен. На рисунке 2-5 показаны концы двух валов A и B. соединены 2 шестернями по 24 и 48 зубьев соответственно.Обратите внимание, что большая шестерня сделает только пол-оборота, в то время как меньшая шестерня сделает полный оборот. То есть соотношение скоростей (отношение скоростей) от большого к меньшему – от 1 до 2.
Рисунок 2-5 Шестерни
Шестерня, которая находится ближе к источнику питания, называется водитель , а шестерня, которая получает питание от водителя, называется ведомая шестерня .
2.2.1 Зубчатые передачи
Зубчатая передача может иметь несколько приводов и несколько ведомых шестерен.
Рисунок 2-6 Зубчатая передача
Когда шестерня A поворачивается один раз по часовой стрелке, шестерня B поворачивается 4 раза. против часовой стрелки, а шестерня C поворачивается один раз по часовой стрелке. Следовательно, шестерня B не изменять скорость C по сравнению с той, которая была бы, если бы была настроена прямо на шестерню A, но меняет направление с против часовой стрелки по часовой стрелке.
Соотношение скоростей первой и последней передач в ряду простых шестерен дозу нельзя изменить, поставив между ними любое количество передач.
На рис. 2-7 показаны составные шестерни , в которых на среднем валу две шестерни.Шестерни B и D вращаются одновременно. скорости, поскольку они прикреплены (закреплены) к одному и тому же валу. Количество Зубья на каждой шестерне приведены на рисунке. Учитывая эти числа, если шестерня A вращается со скоростью 100 об / мин. по часовой стрелке, шестерня B поворачивается на 400 об / мин (оборотов в минуту) против часовой стрелки, и шестерня C поворачивает 1200 об / мин по часовой стрелке.
Рисунок 2-7
Составные шестерни2.2.2 Передаточное число
При работе с шестернями важно знать, какое количество зубьев шестерни должны быть так, чтобы они могли правильно зацепляться с зубчатой передачей.Размер зубьев соединительных шестерен должен быть точно подобран.
2.3 Ремни и шкивы
Ремни и шкивы являются важной частью большинство машин. Шкивы не что иное, как шестерни без зубы, и вместо того, чтобы работать вместе, они вынуждены ездить друг друга с помощью шнуров, веревок, тросов или некоторых видов ремней.
Как и в случае с шестернями, скорости шкивов обратно пропорциональны их диаметры.
Рисунок 2-8
Ремни и шкивы Шкивы также могут быть выполнены в виде блока и захвата.2,4 Рычаг
2,5 Колесо и ось
2,6 клин
2.7 КПД машин
При отработке неполадок на рычагах, , ремнях и шкивы , , наклонные плоскости и пр., мы не брали учет трения или других источников потерь энергии. Другими словами, мы предполагали, что они идеальны, хотя на самом деле это не так.К измерить производительность машины, мы часто находим ее КПД , который определяется как
(2-4)где
- = КПД
машины,
- Вт в = входная работа для станка, и
- Вт на выходе = выходная работа станка.
- Вт в = входная работа для станка, и
Содержание
Полное содержание- 1 Введение в механизмы
- 2 Механизмы и простые машины
- 2.1 Наклонная плоскость
- 2.1.1 Винтовой домкрат
- 2.2 Шестерни
- 2.2.1 Зубчатые передачи
- 2.2.2 Передаточное число
- 2.3 Ремни и шкивы
- 2,4 Рычаг
- 2,5 Рычаг
- 2,6 клин
- 2.7 Эффективность машин
- 3 Подробнее о машинах и механизмах
- 4 Основная кинематика жестких тел с ограничениями
- 5 планарных рычагов
- 6 кулачков
- 7 передач
- 8 Прочие механизмы
- Индекс
- Ссылки
- 2 Механизмы и простые машины
sfinger @ ri.cmu.edu
6 различных механизмов, которые мы используем каждый день
Мир – это механически сложное место. Чтобы различные части оборудования могли выполнять свои функции и поддерживать наши рабочие процессы в нужном русле, многие механизмы должны работать вместе для достижения этих целей. Инженерные механизмы – это простые устройства, которые имеют огромное значение в нашей повседневной жизни (часто мы даже не осознаем этого). Они могут работать вместе или по отдельности, чтобы оптимизировать производство и облегчить нашу жизнь.
Вот шесть основных механизмов, которые наша дизайнерская компания использует почти каждый день при разработке функциональных прототипов для компаний и частных лиц, которые ищут творческие решения бизнес-проблем:
Приводы – это устройства, которые преобразуют накопленную энергию в движение. Накопленная энергия обычно представлена сжатым воздухом (пневматическое давление), электрическим потенциалом или жидким (гидравлическим) давлением. Приводы можно найти в широком спектре оборудования в различных отраслях промышленности, каждый из которых работает для приложения силы, необходимой для выполнения текущей задачи.
Знаете ли вы? Существует три основных типа приводов: электрические, пневматические и гидравлические. Подробнее читайте здесь.
Кулачки – это механические устройства, которые преобразуют вращательное движение в поступательное. Вы, вероятно, знакомы с использованием «грушевых» кулачков для двигателей внутреннего сгорания, но знаете ли вы, что существует бесконечное количество возможностей для дизайна кулачков? Различные конструкции приводят к различным типам движения кулачкового толкателя. Круглые кулачки вызывают плавное линейное движение, сердечники поддерживают равномерную скорость в толкателе кулачка, а кулачки опускания обеспечивают быстрое и прерывистое линейное движение.Различные варианты расположения кулачков означают, что инженеры могут найти новые подходы к проектированию механики и найти новые и более эффективные способы выполнения работы. Подробнее читайте здесь.
Шестерни – один из самых распространенных и разнообразных типов механических устройств. Основная функция шестерен – передавать крутящий момент и регулировать скорость вращения.
Обычно, когда вы думаете о шестерне, вы, вероятно, думаете о «прямозубой» шестерне (по сути, о круге с зубьями). Однако существует много различных типов, включая косозубые, червячные, планетарные и конические шестерни.Цилиндрические шестерни работают с меньшим трением, чем прямозубые, в то время как некоторые червячные передачи (самоблокирующиеся варианты) позволяют передавать движение только в одном направлении. Конические шестерни переводят вращение на 90 градусов и используются как неотъемлемая часть трансмиссии транспортных средств.
Пожалуй, самая интересная передача – это планетарный ряд. Планетарные шестерни предоставляют множество вариантов в зависимости от того, какая шестерня (солнечная, планетарная или кольцевая) остается постоянной, какая из них является ведущей, а какая может свободно вращаться.Подробнее читайте здесь.
Рычаг – это механическое устройство, используемое для передачи и усиления силы путем фиксации входа и выхода относительно точки опоры или поворота. Рычаги можно найти во всем индустриальном мире. Рычаги позволяют машинам легко перемещать тяжелые материалы и переносить их из одного места в другое – при условии, что математика и материалы, используемые для создания рычага, надежны.
Есть замечательная цитата древнегреческого математика Архимеда, которая кратко резюмирует основополагающий принцип рычагов: «Дайте мне место, чтобы встать, и я буду перемещать Землю с его помощью [рычагом].« Архимед имел в виду закон рычага (M1d1 = M2d2, где M – масса объекта, а d – расстояние от точки поворота). С достаточно длинным рычагом греческий математик мог перемещать массу размером с Землю. стоя на другом конце (по крайней мере теоретически). Подробнее здесь.
Трещотки – лучшие помощники механиков и помощников. Любой, кто когда-либо арендовал UHaul для перемещения между городами, вероятно, использовал храповик, чтобы закрепить хранящиеся товары или удерживать колеса своей машины привязанными к прицепу.Особенность храповиков заключается в том, что они фиксируются в одном направлении, что позволяет им затягиваться, не опасаясь буквально «откатиться назад». Другие классные предметы повседневного обихода, в которых используются храповые механизмы, включают в себя застежки-молнии и гаечные ключи с храповым механизмом. Подробнее читайте здесь.
Пружины – это механические устройства, которые накапливают и рассеивают энергию. Как и шестерни, существует несколько различных типов пружин. Среди наиболее распространенных – сжатие, кручение, лист и постоянная сила. Пружины используются в большинстве типов промышленного оборудования и помогают этим сложным машинам выполнять свои основные функции.
Знаете ли вы? Существует теоретический тип пружины постоянного усилия, называемый пружиной «нулевого усилия», который выдавал бы нулевое усилие, если бы его длина была нулевой. Подробнее о пружинах читайте здесь.
Чтобы узнать больше о том, как дизайнеры продуктов в Creative Mechanisms могут помочь вам с проблемами проектирования механики, свяжитесь с нашей командой сегодня!
Практические задачи – теория механизмов и машин
Задачи
Найдите глубину резкости для следующих механизмов
Slider
Слайдер
Слайдер
Вилочный шарнир
Критерий Грасгофа, диапазон движения
Четырехзвенный рычажный механизм имеет следующее Габаритные размеры: А 0 В 0 = 2, А 0 А = 2.5, AB = 1,5, B 0 B = 3. (а) Определите тип четырехстержневой
механизм с использованием Grashof критерий.(б) Определите диапазон движения
эта связь, если ссылка 2 является входом.(c) Определите диапазон движения
эта связь, если ссылка 4 является входной.Четырех стержневой рычажный механизм имеет следующие Габаритные размеры: A 0 B 0 = 2, A 0 A = 2,5, AB = 1,5, B 0 B = 3. (а) Определите тип четырехцилиндрового –
стержневой механизм с использованием Критерий Грасгофа.(b) Определите диапазон
движение этой связи, если ссылка 2 - это вход.(c) Определите диапазон
движение этой связи, если ссылка 4 - это вход.
Анализ положения
Вращающийся кривошип 2 приводит в движение смещенный ползун кривошипно-шатунный механизм. Решите положение ползунок 4 как функция 2
Для каждой связи, показанной выше, а именно: (а) Инверсия кривошипно-шатунного механизма ползуна, (b) Вторая инверсия кривошипно-шатунного механизма ползуна, (c) Прямоточный механизм, (d) Механизм перетаскивания, Найдите путь к точке P.
Определить крутящий момент отношение Т 2 / Т 6.
Найдите угловой скорость звена 7 и линейный скорость точки F на ползунке восьмизвенная связь.
Скорость точки B рычажного механизма показанное на рисунке, составляет 40 м / с. Находить скорость точки A и угловая скорость звена 3.
Найдите отношение VD 2
Кривошип 2 рычажного механизма движется при 2 = 60 рад / сек по часовой стрелке. Найдите VB, VC, 3 и 4.
Найдите скорость точки C на ссылке 4 механизма, когда кривошип 2 при 2 = 48 рад / сек против часовой стрелки.Также найдите 3.
Найдите скорость точки C, когда кривошип 2 приводится в действие с 2 = 60 рад / с ccw. Также найдите 3 и 4.
Для 2 = 45 рад / сек против часовой стрелки найти 3 и 4 фунта стерлингов
Найдите соотношение 5 2.
Инверсия слайдера кривошипно-шатунный механизм приводится в действие по звену 2 при 2 = 60 рад / сек против часовой стрелки. Найдите VB, 3 и 4. Учитывая 2 = 1 рад / сек по часовой стрелке, найти 6 и VB.
Параллельный рычаг имеет противоположный рычаги равной длины. Показывать что 3.всегда равен нулю и 4 = 2. Как бы вы описали движение звена 4 относительно звена 2?
Линия 2 параллельного или поперечная навеска приводится в движение при 2 = 1 рад / сек против часовой стрелки. Найдите ВК и ВД.
Параллельная связь имеет противоположные связи равных длина. Покажите, что 3 всегда ноль и 4 = 2. Как бы вы описываете движение ссылка 4 относительно ссылки 2?
Угловая скорость звена 2 механизм тяги, показанный на цифра составляет 16 рад / сек непрерывно. Постройте полярный скоростная диаграмма для скорости точка B для всех положений кривошипа.Проверять позиции максимума и минимума скорости.
Звено 2 показанного механизма при 2 = 36 рад / сек против часовой стрелки. Находить 3 и VB.
Найдите скорость в точке C соединителя. когда кривошип 2 вращается при 2 = 30 рад / сек против часовой стрелки. Также найдите 3 и 4.
Анализ ускорения
Найдите AB (2 = 0).
Link 2 вращается с постоянной угловая скорость. Определять скорость и ускорение пункта D.
Слайд 3 переместится на слева с постоянный угловой скорость 1 см / сек.Найдите 3 и 6 в позиции показано.
При 2 = -60 рад / с, 2 = -900 рад / с 2, найти скорость и ускорение точки Б.
Заданная угловая скорость звена 2 равна постоянный найти AB, AD и 4.
O 2 A = 2 мм, O 2 O 4 = 4,5 мм, O 4 B = 2,5 мм, AB = 3,6 мм
Найдите AC, учитывая, что
O 2 O 4 = 15, 2 = -60 рад / сек, 2 = -180 рад / сек
2.
Определить: (а) Угловая скорость 3. (б) Величина скольжения скорость штифта в пазу.(c) Угловое ускорение 3.
Развитие теории привода стационарных сельскохозяйственных машин с рычажными механизмами – STUME Journals
МАШИНЫ
- 1 Национальный университет биоресурсов и природопользования Украины
- 2 Таврический государственный агротехнологический университет Украина
Аннотация
Повышение эффективности сельскохозяйственных машин современного технического уровня может быть достигнуто за счет использования новых методов теории механизмов и машин при расчетах и проектировании их рабочих органов и в целом агрегатов машин.Задача исследования заключалась в разработке нового алгоритма решения второй задачи динамики рычажных механизмов с электроприводом, которые используются в современных сельскохозяйственных машинах. Новый алгоритм решения второй задачи динамики рычажных механизмов сельскохозяйственных машин, оснащенных разработан электропривод. Алгоритм находит применение при расчетах плоских рычажных механизмов стационарных сельскохозяйственных машин.
Ключевые слова
Список литературы
- Добровольский В.А., Заблонский К.И., Мак С.Л., Радчик С.А., Эрлих Л.Б. Детали машин. – М .: Машиностроение, 1972. – 496 с. (на русском языке).
- Еременко О.И. Определение момента инерции маховика для рычажных механизмов, работающих от электропривода // Вестник Национального технического университета Украины «КПИ». Машиностроение. Выпуск 41. – Киев, 2001, С. 213-220. (на украинском языке).
- Кожевников С.Н. Теория механизмов и машин. – М .: Машиностроение, 1973.