
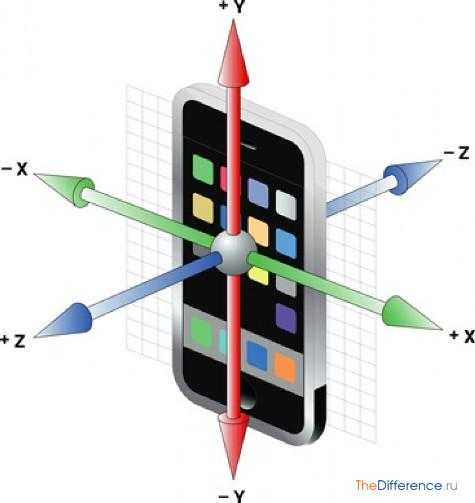
Чем отличается гироскоп от акселерометра
Многие из современных мобильных гаджетов — смартфонов и планшетов — оснащены гироскопами и акселерометрами. Что это за аппаратные компоненты?
Что такое гироскоп?
Гироскоп, встраиваемый в мобильный гаджет, это небольшое устройство, способное определять собственный (а значит, и того девайса, на котором оно размещено) угол наклона относительно земной поверхности и передавать соответствующие координаты в то или иное приложение. Например — в игру, установленную на смартфоне либо планшете или иной вид ПО. Использование приложениями данных с гироскопа дает возможность пользователю эффективно управлять интерфейсом девайса или, например, игровыми персонажами.
Гироскопы — это девайсы, которые находят самое широкое применение не только в индустрии мобильных решений, но и в иных сегментах рынка электронных устройств, а также в автомобильной, аэрокосмической промышленности. Принцип их работы вне зависимости от сферы применения одинаковый — они используются для определения положения объекта относительно земной поверхности.
к содержанию ↑Что такое акселерометр?
Акселерометр в мобильном гаджете — это устройство, позволяющее измерять собственное (а значит, и того девайса, на котором оно размещено) ускорение. Даже если длина «разгона» составляет миллиметры. Как и гироскоп, акселерометр, инсталлированный на смартфоне или планшете, может передавать сведения об ускорении в игру или приложение. При этом соответствующий сигнал призван выполнять, в принципе, ту же функцию, что и в случае с задействованием гироскопа — он помогает программе, работающей на гаджете, определить свое положение относительно земной поверхности.
Вместе с тем у акселерометра есть одно важное преимущество — измерение ускорения позволяет устройству весьма точно вычислять расстояние, на которое оно перемещено в пространстве. Поэтому мобильный гаджет с акселерометром можно использовать, к примеру, как шагомер.
Способность акселерометра измерять ускорение исключительно полезна для работы систем защиты некоторых электронных устройств от последствий падения или неудачной «перепасовки» одним пользователем другому. Подобные системы могут устанавливаться на жестких дисках ноутбуков: если они обнаруживают, что винчестер куда-то летит, то временно блокируют его записывающую головку — самый хрупкий элемент. Если жесткий диск все же упадет, то сохранится шанс на то, что его кластеры останутся в целости.
к содержанию ↑Сравнение
Главное отличие гироскопа от акселерометра — в принципах работы данных аппаратных компонентов. Первый вычисляет свой угол наклона относительно земли, второй подсчитывает собственное ускорение — но, опять же, относительно земной поверхности. На практике обе функции могут в ряде случаев заменять друг друга или же удачно дополнять. Поэтому многие мобильные девайсы оснащаются как акселерометром, так и гироскопом.
Вместе с тем у акселерометра есть ряд возможностей, недоступных для гироскопа. В частности — формирование сигналов, позволяющих определить расстояние, пройденное пользователем мобильного устройства.
Определив то, в чем разница между гироскопом и акселерометром, зафиксируем ее ключевые критерии в таблице.
к содержанию ↑Таблица
| Гироскоп | Акселерометр |
| Что между ними общего? | |
| Оба устройства позволяют определить их положение относительно земли, а также того гаджета, в котором они инсталлированы, и могут задействоваться в этих целях одновременно | |
| В чем разница между ними? | |
| Определяет собственный угол наклона относительно земли | Определяет ускорение относительно земной поверхности |
| Не может использоваться в целях измерения длительности перемещения устройства | Может применяться для измерения длительности перемещения устройства |
thedifference.ru
Гироскопы на радиоуправляемых моделях
Авторы – Виталий Пузрин
Назначение гироскопов и устройство датчиков поворота
Гироскопы предназначены для демпфирования угловых перемещений моделей вокруг одной из осей, либо стабилизации их углового перемещения. Применяются в основном на летающих моделях в случаях, когда необходимо повысить стабильность поведения аппарата или создать ее искусственно. Наибольшее применение (около 90%) гироскопы нашли в вертолетах обычной схемы для стабилизации относительно вертикальной оси путем управления шагом рулевого винта. Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж. Курс стабилизируют в основном на турбореактивных моделях для обеспечения безопасного взлета и посадки, – там большие скорости и взлетные дистанции, а ВПП, как правило, узкая. Тангаж стабилизируют на моделях с малой, нулевой, либо отрицательной продольной устойчивостью (с задней центровкой), повышающей их маневренные возможности. Крен полезно стабилизировать даже на учебных моделях.
На самолетах и планерах спортивных классов гироскопы запрещены требованиями FAI.
Гироскоп состоит из датчика угловой скорости и контроллера. Как правило, они конструктивно объединены, хотя на устаревших, а также “крутых” современных гироскопах размешены в разных корпусах.
По конструкции датчиков вращения, гироскопы можно разделить на два основных класса: механические и пьезо. Точнее, сейчас делить особо уже не на что, потому что механические гироскопы полностью сняты с производства как морально устаревшие. Тем не менее, распишем и их принцип работы тоже, хотя бы ради исторической справедливости.
Основу механического гироскопа составляют тяжелые диски, закрепленные на валу электродвигателя. Двигатель в свою очередь имеет одну степень свободы, т.е. может свободно вращаться вокруг оси, перпендикулярной валу двигателя.

Раскрученные двигателем тяжелые диски обладают гироскопическим эффектом. Когда вся система начинает вращаться вокруг оси, перпендикулярной двум другим, двигатель с дисками отклоняется на определенный угол. Величина этого угла пропорциональна скорости поворота (те, кто интересуется силами, возникающими в гироскопах, могут поглубже ознакомиться с кориолисовым ускорением в специальной литературе). Отклонение мотора фиксируется датчиком, сигнал которого поступает на блок электронной обработки данных.
Пример типичной конструкции пьезоэлектрического датчика угловых скоростей дан на следующем рисунке.
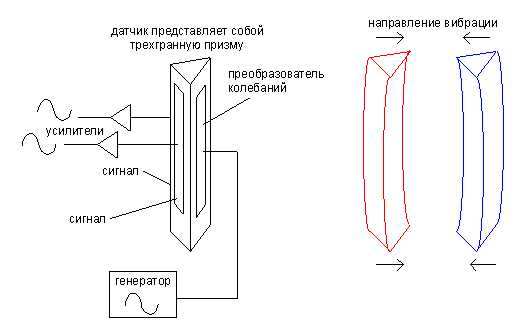
У датчиков подобной конструкции есть недостаток в виде большого температурного дрейфа сигнала (т.е. при изменении температуры на выходе пьезодатчика, находящегося в неподвижном состоянии, может появиться сигнал). Однако достоинства, получаемые взамен, намного перекрывают это неудобство. Пьезогироскопы потребляют намного меньший ток по сравнению с механическими, выдерживают большие перегрузки (менее чувствительны к авариям), позволяют более точно реагировать на повороты моделей. Что касается борьбы с дрейфом, то в дешевых моделях пьезогироскопов есть просто регулировка “нуля”, а в более дорогих – автоматическая установка “нуля” микропроцессором при подаче питания и компенсация дрейфа температурными датчиками.
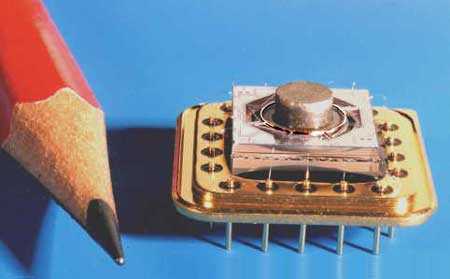
Жизнь, однако, не стоит на месте, и вот уже в новой линейке гироскопов от Futaba (Семейство Gyxxx с системой “AVCS”) уже стоят датчики от Silicon Sensing Systems, которые очень выгодно отличаются по характеристикам от продуктов Murata и Tokin. Новые датчики имеют более низкий температурный дрейф, более низкий уровень шумов, очень высокую виброзащищенность и расширенный диапазон рабочих температур. Это достигнуто за счет изменения конструкции чувствительного элемента. Он выполнен в виде кольца, работающего в режиме изгибных колебаний. Кольцо делается методом фотолитографии, как микросхема, поэтому датчик называется SMM (Silicon Micro Machine). Не будем углубляться в технические подробности, любопытные смогут найти все здесь: http://www.spp.co.jp/sssj/comp-e.html. Приведем лишь несколько фотографий самого датчика, датчика без верхней крышки и фрагмента кольцевого пьезоэлемента.
Типичные гироскопы и алгоритмы их работы
Наиболее известными производителями гироскопов на сегодняшний день являются фирмы Futaba, JR-Graupner, Ikarus, CSM, Robbe, Hobbico и т.д.
Теперь рассмотрим режимы работы, которые используются в большинстве выпускаемых гироскопов (всякие необычные случаи рассмотрим потом отдельно).
Гироскопы со стандартным режимом работы
В этом режиме гироскоп демпфирует угловые перемещения модели. Такой режим достался нам в наследство от механических гироскопов. Первые пьезогироскопы отличались от механических в основном датчиком. Алгоритм работы остался неизменным. Суть его сводится к следующему: гироскоп измеряет скорость поворота и выдает коррекцию к сигналу с передатчика, чтобы замедлить вращение, насколько это возможно. Ниже дается пояснительная блок-схема.
Как видно из рисунка, гироскоп пытается подавить любое вращение, в том числе и то, которое вызвано сигналом с передатчика. Чтобы избежать такого побочного эффекта, желательно на передатчике задействовать дополнительные микшеры, чтобы при отклонение ручки управления от центра, чувствительность гироскопа плавно уменьшалась. Такое микширование может быть уже реализовано внутри контроллеров современных гироскопов (чтобы уточнить, есть оно или нет – посмотрите характеристики устройства и руководство по эксплуатации).
Регулировка чувствительности реализуется несколькими способами:
- Дистанционная регулировка отсутствует. Чувствительность задается на земле (регулятором на корпусе гироскопа) и не меняется во время полета.
- Дискретная регулировка (dual rates gyro). На земле задается два значения чувствительности гироскопа (двумя регуляторами). В воздухе можно выбирать нужное значение чувствительности по каналу регулирования.
- Плавная регулировка. Гироскоп выставляет чувствительность пропорционально сигналу в регулирующем канале.
В настоящее время практически все современные пьезогироскопы имеют плавную регулировку чувствительности (а о механических гироскопах можно уже смело забыть). Исключение составляют только базовые модели некоторых производителей, где чувствительность устанавливается регулятором на корпусе гироскопа. Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Если говорить о достоинствах гироскопов, реализующих только “стандартный” режим работы, то можно отметить, что:
- Такие гироскопы имеют довольно низкую цену (вследствие простоты реализации)
- При установке на хвостовую балку вертолета, новичкам проще выполнять полеты по кругу, так как за балкой можно особенно не следить (балка сама разворачивается по ходу движения вертолета).
Недостатки:
- В недорогих гироскопах термокомпенсация сделана недостаточно хорошо. Необходимо вручную выставлять “ноль”, который может сместиться при изменении температуры воздуха.
- Приходится применять дополнительные меры по устранению эффекта подавления гироскопом управляющего сигнала (дополнительное микширование в канале управления чувствительности или увеличение расхода рулевой машинки).
Вот довольно известные примеры описанного типа гироскопов:
При выборе рулевой машинки, которая будет подключаться к гироскопу, следует отдавать предпочтение более быстрым вариантам. Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Гироскопы с режимом удержания направления
В этом режиме стабилизируется угловое положение модели. Для начала маленькая историческая справка. Первой фирмой, которая сделала гироскопы с таким режимом, была CSM. Режим она назвала Heading Hold. Поскольку название было запатентовано, другие фирмы стали придумывать (и патентовать) свои собственные названия. Так возникли марки “3D”, “AVSC” (Angular Vector Control System) и другие. Такое многообразие может повергнуть новичка в легкое замешательство, но на самом деле, никаких принципиальных различий в работе таких гироскопов нет.
И еще одно замечание. Все гироскопы, которые имеют режим Heading Hold, поддерживают также и обычный алгоритм работы. В зависимости от выполняемого маневра, можно выбирать тот режим гироскопа, который больше подходит.
Итак, о новом режиме. В нем гироскоп не подавляет вращение, а делает его пропорциональным сигналу с ручки передатчика. Разница очевидна. Модель начинает вращаться именно с той скоростью, с которой нужно, независимо от ветра и других факторов.
Посмотрите блок-схему. По ней видно, что из управляющего канала и сигнала с датчика получается (после сумматора) разностный сигнал ошибки, который подается на интегратор. Интегратор же меняет сигнал на выходе до тех пор, пока сигнал ошибки не будет равен нулю. Через канал чувствительности регулируется постоянная интегрирования, то есть скорость отработки рулевой машинки. Разумеется, вышеприведенные объяснения весьма приблизительны и обладают рядом неточностей, но ведь мы собираемся не делать гироскопы, а применять их. Поэтому нас гораздо больше должны интересовать практические особенности применения подобных устройств.
Достоинства режима Heading Hold очевидны, но хочется особо подчеркнуть плюсы, которые проявляются при установке такого гироскопа на вертолет (для стабилизации хвостовой балки):
- на вертолете начинающий пилот в режиме висения может практически не управлять хвостовым винтом
- отпадает необходимость в микшировании шага хвостового винта с газом, что несколько упрощает предполетную подготовку
- триммирование хвостового винта можно производить без отрыва модели от земли
- становится возможным выполнение таких маневров, которые раньше были затруднены (например, полет хвостом вперед).
Для самолетов применение данного режима тоже может быть оправдано, особенно на некоторых сложных 3D-фигурах вроде “Torque Roll”.
Вместе с тем следует отметить, что каждый режим работы имеет свои особенности, поэтому использование Heading Hold везде подряд не является панацеей. При выполнении обычных полетов на вертолете, особенно новичками, использование функции Heading Hold может привести к потере управления. Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
В качестве примеров гироскопов, которые поддерживают режим Heading Hold, можно привести следующие модели:
Переключение между стандартным режимом и Heading Hold производится через канал регулировки чувствительности. Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую – то гироскоп перейдет в стандартный режим. Средная точка – когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Отдельно стоит затронуть тему применяемых рулевых машинок. Для того, чтобы добиться максимального эффекта от Heading Hold, нужно ставить рулевые машинки с повышенной скоростью работы и очень высокой надежностью. При повышении чувствительности (если скорость отработки машинки позволяет), гироскоп начинает перекладывать сервомеханизм очень резко, даже со стуком. Поэтому машинка должна иметь серьезный запас прочности, чтобы долго прослужить и не выйти из строя. Предпочтение стоит отдавать так называемым “цифровым” машинкам. Для самых современных гироскопов разрабатывают даже специализированные цифровые сервомашинки (например, Futaba S9251 для гироскопа GY601). Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Специализированные самолетные гироскопы
Для применения в самолетах с целью стабилизации крена начали выпускать специализированные гироскопы. От обычных они отличаются тем, что имеют еще один канал внешней команды.
 |  |
При управлении каждого элерона отдельным серво, самолетчики с компьютерной аппаратурой задействуют функцию флаперонов. Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена – в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Касаясь применения гироскопов на самолете, нужно отметить, что нельзя использовать режим Heading Hold на взлете и посадке. Точнее, в тот момент, когда самолет касается земли. Это потому, что когда самолет находится на земле, он не может накрениться или повернуть, поэтому гироскоп выведет рули в какое-нибудь крайнее положение. А при отрыве самолета от земли (или сразу после посадки), когда модель имеет большую скорость, сильное отклонение рулей может сыграть злую шутку. Поэтому настоятельно рекомендуется использовать гироскоп на самолетах в стандартном режиме.
В самолетах эффективность рулей и элеронов пропорциональна квадрату скорости полета самолета. При широком диапазоне скоростей, что характерно для сложного пилотажа, необходимо компенсировать это изменение регулированием чувствительности гироскопа. Иначе при разгоне самолета система перейдет в автоколебательный режим. Если же задать сразу низкий уровень эффективности гироскопа, то на малых скоростях, когда он особенно нужен, от него не будет должного эффекта. На настоящих самолетах такое регулирование делает автоматика. Возможно, скоро так будет и на моделях. В некоторых случаях переход в автоколебательный режим органа управления полезен – при очень низких скоростях полета самолета. Многие наверное видели, как на МАКС-2001 “Беркут” С-37 показывал фигуру “харриер”. Переднее горизонтальное оперение при этом работало в автоколебательном режиме. Гироскоп в канале крена позволяет делать самолет “несваливаемым на крыло”. Подробнее о работе гироскопа в режиме стабилизации тангажа самолетов можно почитать в известной монографии И.В.Остославского “Аэродинамика самолета”.
Заключение
В последние годы появилось много дешевых моделей миниатюрных гироскопов, позволяющих расширить сферу их применения. Простота инсталляции и низкие цены оправдывают использование гироскопов даже на учебных и радиобойцовых моделях. Прочность пьезоэлектрических гироскопов такова, что при аварии скорее испортится приемник или серво, чем гироскоп.
Вопрос о целесообразности насыщения летающих моделей современной авионикой каждый решает сам. На наш взгляд, в спортивных классах самолетов, – по крайней мере, на копиях, гироскопы все-таки со временем разрешат. Иначе невозможно обеспечить реалистичный, похожий на оригинал полет уменьшенной копии из-за разных чисел Рейнольдса. На хоббийных аппаратах применение искусственной стабилизации позволяет расширить диапазон погодных условий полетов, и летать в такой ветер, когда только ручное управление не в состоянии удержать модель.
Обсудить на форумеwww.rcdesign.ru
Гироскоп и его свойства.
Гироскопом в технике называют симметричное тело, быстро вращающееся вокруг своей оси симметрии. Гироскопом является наша Земля, быстро вращаюшийся маховик, детский волчок, артиллерийский снаряд, ротор электродвигателя и т.п.
Быстро вращающаяся часть гироскопа называется ротором. Ось вращения ротора— главная ось гироскопа.
Число степеней свободы зависит от типа подвеса, в который помещен ротор.
Ротор гироскопа с тремя степенями свободы может вращаться вокруг 3 взаимно-перпендикулярных осей: вокруг оси X-X в подшипниках внутренней рамы / первая степень свободы, вместе с внутренней рамой оси Y-Y в подшипниках наружной рамы / вторая степень свободы и, наконец, вместе с внутренней и наружной рамами — вокруг оси Z-Z / треть степень свободы.
Такой подвес, в котором ротор имеет возможность вращаться вокруг трех взаимно-перпендикулярных осей, называется КАРДАНОВЫМ ПОДВЕСОМ.
Гироскоп обладает замечательным свойствами.
ПЕРВОЕ СВОЙСТВО гироскопа с 3 степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное положение.
Если эта ось направлена на какую-либо звезду, то при любых перемещениях основания прибора она будет продолжать указывать на эту звезду, меняя свою ориентацию относительно земных осей.
Впервые это свойство гироскопа использовал французский ученый Л. Фуко для экспериментального доказательства вращения Земли вокруг своей оси (1852г.). Отсюда и само название ГИРОСКОП, что в переводе с греческого («гирос» и «скопео») означает « наблюдать вращение».
ВТОРОЕ СВОЙСТВО гироскопа состоит в том, что под действием случайных толчков, ударов, т.е. импульсов сил, главная ось не изменяет своего положения в пространстве, т.е. главная ось устойчива к кратковременным возмущениям.
ТРЕТЬЕ СВОЙСТВО гироскопа обнаруживается , когда на его ось (или рамку) начинает действовать сила, стремящаяся привести ось в движение. Под действием этой силы ось гироскопа будет отклонятся не в сторону действия силы, а в направлении перпендикулярном к этой силе. Это движение назыается ПРЕЦЕССИЕЙ.
Направление прецессии таково, что ось собственного вращения ротора стремится кратчайшим путем совместиться с осью вынужденного вращения.
Свойства трёхстепенного гироскопа используются для измерения углов крена, тангажа и курса: АГБ-3К, АГД-1С, ГПК-52.
Гироскоп с двумя степенями свободы представляет собой ротор, имеющий возможность поворачиваться вокруг двух взаимно-перпендикулярных осей: вокруг оси Z-Z в подшипниках ротора одна степень свободы (и вместе с рамкой вокруг оси X-X) вторая степень свободы.
Такой гироскоп не обладает ни одним из свойств гироскопа с тремя степенями свободы, однако, у него есть другое, очень интересное свойство.
Если основанию гироскопа сообщить вынужденное вращение с угловой скоростью ωвокруг вертикальной оси Y, то гироскоп тот час же повернётся, чтобы совместить ось собственного вращения с осью вынужденного вращения Y- Y.
Таким образом, гироскоп с двумя степенями свободы может служиь индикатором, реагирующим на угловую скорость.
Свойство гироскопа с двумя степенями свободы положен в основу работы указателя поворота ЭУП-53, выключателя коррекции ВК-53, датчиков угловых скоростей крена, тангажа, направления /ДУСов/ из комплекта автопилотов АП-34Б и АП-28Л1.



Похожие статьи:
poznayka.org
Лазерный гироскоп — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 22 октября 2018; проверки требуют 7 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 22 октября 2018; проверки требуют 7 правок. Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером (а точнее квантовым усилителем). Замкнутый контур имеет ответвление через полупрозрачное зеркало (или, например, через щель) в датчик на базе интерферометра. Кольцевой лазерный гироскоп производства украинского завода «Арсенал» в одном из павильонов авиасалона МАКС-2011. Резонатор имеет форму квадрата. В его центре расположен виброподвес.
Кольцевой лазерный гироскоп производства украинского завода «Арсенал» в одном из павильонов авиасалона МАКС-2011. Резонатор имеет форму квадрата. В его центре расположен виброподвес.  Лазерный гироскоп КМ-11-1А производства НИИ «Полюс». Здесь для накачки используется СВЧ-разряд, а вместо зеркал по сторонам резонатора установлены призмы.
Лазерный гироскоп КМ-11-1А производства НИИ «Полюс». Здесь для накачки используется СВЧ-разряд, а вместо зеркал по сторонам резонатора установлены призмы.Лазерный гироскоп — оптический прибор для измерения угловой скорости, обычно применяется в системах инерциальной навигации. Лазерные гироскопы используют эффект Саньяка — появление фазового сдвига встречных световых волн во вращающемся кольцевом интерферометре. В отличие от механического гироскопа, данный приб
ru.wikipedia.org
Гироскоп Википедия
Иллюстрация к основному свойству 3-степенного гироскопа — гироскопа в кардановом подвесе. При нулевом моменте, воздействующем на ось гироскопа, её направление в пространстве остается неизменным. Анимация прецессии механического гироскопа. Опрокидывающий момент вызывает прецессию, перпендикулярную к вектору момента.Гироско́п (от др.-греч. γῦρος «круг» + σκοπέω «смотрю») — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Ж. Фуко в своём докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
История[ | ]
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издавна люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы, основанные на гравитации: отвес и уровень. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Древней Греции были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоанн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас реком
ru-wiki.ru
ГИРОСКОП • Большая российская энциклопедия
ГИРОСКО́П (от греч. γῦρος – круг, окружность и σϰοπέω – наблюдать), устройство, совершающее быстрые циклические (вращательные или колебательные) движения и чувствительное вследствие этого к повороту в инерциальном пространстве. Термин «Г.» предложен в 1852 Ж. Б. Л. Фуко для изобретённого им прибора, предназначенного для демонстрации вращения Земли вокруг своей оси. Долгое время термин «Г.» использовался для обозначения быстровращающегося симметричного твёрдого тела. В совр. технике Г. – осн. элемент всевозможных гироскопич. устройств или приборов, широко применяемых для автоматич. управления движением самолётов, судов, торпед, ракет, космич. аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих др. случаях (напр., при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
Классический гироскоп
Согласно законам ньютоновской механики скорость поворота оси быстровращающегося симметричного твёрдого тела в пространстве обратно пропорциональна его собств. угловой скорости и, следовательно, ось Г. поворачивается столь медленно, что на некотором интервале времени её можно использовать в качестве указателя неизменного направления в пространстве.
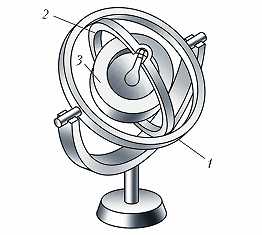
Рис. 2. Классический гироскоп в кардановом подвесе: 1 – внешнее кольцо; 2 – внутреннее кольцо; 3 – ротор.
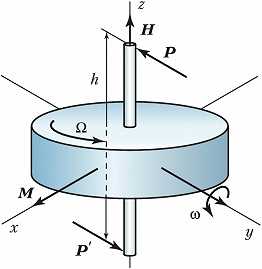
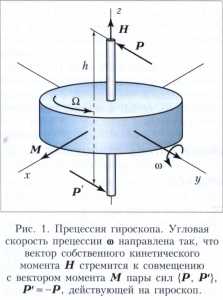
Рис. 1. Прецессия гироскопа. Угловая скорость прецессии 𝛚 направлена так, что вектор собственного кинетического момента H стремится к совмещению с вектором момента M пары сил {P, P’}, P’=–P, дей…
Простейшим Г. является волчок, парадоксальность поведения которого заключается в его сопротивлении изменению направления оси вращения. Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией Г. Если к оси быстро вращающегося свободного Г. приложить пару сил $\{\boldsymbol P, \boldsymbol P′\}, \boldsymbol P′=– \boldsymbol P$, с моментом $M=Ph$, где $h$ – плечо пары сил (рис. 1), то (против ожидания) Г. начнёт дополнительно поворачиваться не вокруг оси $x$, перпендикулярной к плоскости пары сил, а вокруг оси $y$, лежащей в этой плоскости и перпендикулярной оси $z$ вращения Г. Если в к.-л. момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение Г. безынерционно. Чтобы ось Г. могла свободно поворачиваться в пространстве, Г. обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрич. шарнирами. Обычно при отсутствии технологич. погрешностей оси рамок карданового подвеса пересекаются в одной точке – центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Г., у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классич. Г. – задача динамики твёрдого тела.
Осн. количественной характеристикой ротора механич. Г. является его вектор собств. кинетич. момента, называемого также моментом количества движения или моментом импульса, $$\boldsymbol H=I\boldsymbol{\Omega}, \,\,\,(1)$$где $I$ – момент инерции ротора Г. относительно оси собств. вращения, $\boldsymbol \Omega$ – угловая скорость собств. вращения Г. относительно оси симметрии.
Медленное движение вектора собств. кинетич. момента Г. под действием моментов внешних сил, называемое прецессией Г., описывается уравнением$$\boldsymbol {\omega} × \boldsymbol H=\boldsymbol M,\,\,\,(2)$$где $\boldsymbol \omega$ – вектор угловой скорости прецессии, $\boldsymbol H$ – вектор собств. кинетич. момента Г., $\boldsymbol M$ – ортогональная к $\boldsymbol H$ составляющая вектора момента внешних сил, приложенных к гироскопу.
Момент сил, приложенных со стороны ротора к подшипникам оси собств. вращения ротора, возникающий при изменении направления оси и определяемый уравнением$$\boldsymbol {M}_g=–\boldsymbol{M}=\boldsymbol H×\boldsymbol \omega,\,\,\,(3)$$называется гироскопич. моментом.
Кроме медленных прецессионных движений ось Г. может совершать быстрые колебания с малой амплитудой и высокой частотой – т. н. нутации. Для свободного Г. с динамически симметричным ротором в безынерционном подвесе частота нутационных колебаний определяется формулой $$ν=H/A,$$где $A$ – момент инерции ротора относительно оси, ортогональной оси собств. вращения и проходящей через центр масс ротора. При наличии сил трения нутационные колебания обычно достаточно быстро затухают.
Погрешность Г. измеряется скоростью ухода его оси от первоначального положения. Согласно уравнению (2) величина ухода, называемого также дрейфом, пропорциональна моменту сил $M$ относительно центра подвеса Г.:$$ω_{yx}=M/H.\,\,\,(4)$$Уход $ω_{yx}$ обычно измеряется в угловых градусах в час. Из формулы (4) следует, что свободный Г. функционирует идеально лишь в том случае, если внешний момент $M$ равен 0. При этом угловая скорость прецессии обращается в нуль и ось собств. вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Однако на практике любые средства, используемые для подвеса ротора Г., являются причиной возникновения нежелательных внешних моментов неизвестных величины и направления. Формула (4) определяет пути повышения точности механич. Г.: надо уменьшить «вредный» момент сил $M$ и увеличить кинетический момент $H$. При выборе угловой скорости Г. необходимо учитывать одно из главных ограничений, связанных с пределами прочности материала ротора из-за возникающих при вращении центробежных сил. При разгоне ротора выше т. н. допускаемой угловой скорости начинается процесс его разрушения.
Лучшие совр. Г. имеют случайный уход порядка 10–4–10–5°/ч. Ось Г. с погрешностью 10–5°/ч совершает полный оборот на 360° за 4 тыс. лет! Точность балансировки Г. с погрешностью 10–5 °/ч должна быть выше одной десятитысячной доли микрометра (10–10 м), т. е. смещение центра масс ротора из центра подвеса не должно превышать величину порядка диаметра атома водорода.
Гироскопические устройства
можно разделить на силовые и измерительные. Силовые устройства служат для создания моментов сил, приложенных к основанию, на котором установлен гироскопич. прибор; измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и т. п.).
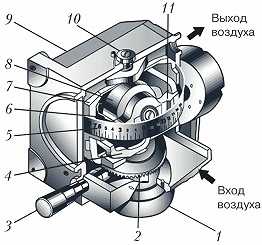
Рис. 3. Авиационный гироуказатель курса с воздушным приводом: 1 – основание; 2 – зубчатое колесо синхронизатора; 3 – ручка арретира; 4 – арретир; 5 – шкала азимута; 6 &nd…
Впервые уравновешенный Г. нашёл практич. применение в 1898 в приборе для стабилизации курса торпеды, изобретённом австр. инженером Л. Обри. Аналогичные приборы в разл. вариантах исполнения начали использовать в 1920-х гг. на самолётах для указания курса (Г. направления, гирополукомпасы), а позднее для управления движением ракет. На рис. 3 показан пример применения гироскопа с тремя степенями свободы в авиац. указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создаётся и поддерживается струёй сжатого воздуха, направленной на рифлёную поверхность обода. По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собств. вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
Гирогоризонт, или искусств. горизонт, позволяющий пилоту поддерживать свой самолёт в горизонтальном положении, когда естеств. горизонт не виден, основан на использовании Г. с вертикальной осью вращения, сохраняющей своё направление при наклонах самолёта. В автопилотах применяются два Г. с горизонтальной и вертикальной осями вращения; первый служит для сохранения курса самолёта и управляет вертикальными рулями, второй – для сохранения горизонтального положения самолёта и управляет горизонтальными рулями.
С помощью Г. созданы автономные инерциальные навигационные системы (ИНС), предназначенные для определения координат, скорости и ориентации подвижного объекта (корабля, самолёта, космич. аппарата и т. п.) без использования к.-л. внешней информации. В состав ИНС кроме Г. входят акселерометры, предназначенные для измерения ускорения (перегрузки) объекта, а также компьютер, интегрирующий по времени выходные сигналы акселерометров и выдающий навигационную информацию с учётом показания Г. К нач. 21 в. созданы настолько точные ИНС, что дальнейшего повышения точностей для решения мн. задач уже не требуется.
Развитие гироскопич. техники последних десятилетий сосредоточилось на поиске нетрадиц. областей применения гироскопич. приборов – разведка полезных ископаемых, предсказание землетрясений, сверхточное измерение координат ж.-д. путей и нефтепроводов, мед. техника и мн. другое.
Неклассические виды гироскопов
Высокие требования к точности и эксплутационным характеристикам гироскопич. приборов привели не только к дальнейшим усовершенствованиям классич. Г. с вращающимся ротором, но и к поискам принципиально новых идей, позволяющих решить проблему создания чувствит. датчиков для индикации и измерения угловых движений объекта в пространстве. Этому способствовали успехи квантовой электроники, ядерной физики и др. областей точных наук.
В гироскопе с воздушной опорой шариковые подшипники, используемые в традиц. кардановом подвесе, заменены «газовой подушкой» (газодинамич. опорой). Это полностью устранило износ материала опор во время работы и позволило почти неограниченно увеличить время службы прибора. К недостаткам газовых опор относятся довольно большие потери энергии и возможность внезапного отказа при случайном контакте ротора с поверхностью опоры.
Поплавковый гироскоп представляет собой роторный Г., в котором для разгрузки подшипников подвеса все подвижные элементы взвешиваются в жидкости с большой плотностью так, чтобы вес ротора вместе с кожухом уравновешивался гидростатич. силами. Благодаря этому на много порядков снижается сухое трение в осях подвеса и увеличивается ударная и вибрац. стойкость прибора. Герметичный кожух, выполняющий роль внутр. рамки карданового подвеса, называется поплавком. Ротор Г. внутри поплавка вращается на возд. подушке в аэродинамич. подшипниках со скоростью порядка 30–60 тыс. оборотов в минуту. Для повышения точности прибора необходимо использование системы термостабилизации. Поплавковый Г. с большим вязким трением жидкости называется также интегрирующим гироскопом.
Рис. 4. Динамически настраиваемый гироскоп с внутренним кардановым подвесом: 1 – ротор; 2 – внутреннее кольцо; 3 и 4 – торсионы; 5 – электродвигатель.
Динамически настраиваемый гироскоп (ДНГ) принадлежит к классу Г. с упругим подвесом ротора, в которых свобода угловых движений оси собств. вращения обеспечивается за счёт упругой податливости конструктивных элементов (напр., торсионов). В ДНГ, в отличие от классич. Г., используется т. н. внутр. карданов подвес (рис. 4), образованный внутр. кольцом 2, которое изнутри крепится торсионами 4 к валу электродвигателя 5, а снаружи – торсионами 3 к ротору 1. Момент трения в подвесе проявляется только в результате внутр. трения в материале упругих торсионов. В ДНГ за счёт подбора моментов инерции рамок подвеса и угловой скорости вращения ротора осуществляется компенсация упругих моментов подвеса, приложенных к ротору. К достоинствам ДНГ относятся их миниатюрность, отсутствие подшипников со специфич. моментами трения, присутствующими в классич. кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
Кольцевой лазерный гироскоп (КЛГ), называемый также квантовым гироскопом, создан на основе лазера с кольцевым резонатором, в котором по замкнутому оптич. контуру одновременно распространяются встречные электромагнитные волны. К достоинствам КЛГ относятся отсутствие вращающегося ротора, подшипников, подверженных действию сил трения, высокая точность.
Волоконно-оптический гироскоп (ВОГ) представляет собой волоконно-оптический интерферометр, в котором распространяются встречные электромагнитные волны. ВОГ является аналоговым преобразователем угловой скорости вращения основания, на котором он установлен, в выходной электрич. сигнал.
Волновой твердотельный гироскоп (ВТГ) основан на использовании инертных свойств упругих волн в твёрдом теле. Упругая волна может распространяться в сплошной среде, не изменяя своей конфигурации. Если возбудить стоячие волны упругих колебаний в осесимметричном резонаторе, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на меньший, но известный угол. Соответствующее движение волны как целого называется прецессией. Скорость прецессии стоячей волны пропорциональна проекции угловой скорости вращения основания на ось симметрии резонатора. К достоинствам ВТГ относятся: высокое отношение точность/цена; способность переносить большие перегрузки, компактность и небольшая масса, низкая энергоёмкость, малое время готовности, слабая зависимость от темп-ры окружающей среды.
Вибрационный гироскоп (ВГ) основан на свойстве камертона сохранять плоскость колебаний своих ножек. В ножке колеблющегося камертона, установленного на платформе, вращающейся вокруг оси симметрии камертона, возникает периодич. момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного Г. стимулировала целое направление поисков новых типов Г., использующих пьезоэлектрич. эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и т. п.
Микромеханический гироскоп (ММГ) относится к Г. низких точностей (ниже 10–1°/ч). Эта область традиционно считалась малоперспективной для задач управления движущимися объектами и навигации. Но в кон. 20 в. разработка ММГ стала одним из наиболее интенсивно разрабатываемых направлений гироскопич. техники, тесно связанным с совр. кремниевыми технологиями. ММГ представляет собой своеобразный электронный чип с кварцевой подложкой площадью в неск. квадратных миллиметров, на которую методом фотолитографии наносится плоский вибратор типа камертона. Точность совр. ММГ невелика и достигает 101–102°/ч, однако решающее значение имеет исключительно низкая стоимость микромеханич. чувствит. элементов. Благодаря использованию хорошо отработанных совр. технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнич. устройства и даже детские игрушки.
Неконтактный гироскоп относится к гироскопич. устройствам сверхвысоких точностей (10–6–5· 10–4 H /ч). Разработка Г. с неконтактными подвесами началась в сер. 20 в. В неконтактных подвесах реализуется состояние левитации, т. е. состояние, при котором ротор Г. «парит» в силовом поле подвеса без к.-л. механич. контакта с окружающими телами. Среди неконтактных Г. выделяют Г. с электростатич., магнитным и криогенным подвесами ротора. В электростатич. Г. проводящий бериллиевый сферич. ротор подвешен в вакуумированной полости в регулируемом электрич. поле, создаваемом системой электродов. В криогенном Г. сверхпроводящий ниобиевый сферич. ротор подвешен в магнитном поле; рабочий объём Г. охлаждается до сверхнизких темп-р, так, чтобы ротор перешёл в сверхпроводящее состояние. Г. с магниторезонансным подвесом ротора является аналогом Г. с электростатич. подвесом ротора, в котором электрич. поле заменено магнитным, а бериллиевый ротор – ферритовым. Совр. Г. с неконтактными подвесами – это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
Кроме перечисленных выше типов Г. проводились и проводятся работы над экзотич. типами Г., такими, как ионный Г., ядерный гироскоп и др.
Математические задачи в теории гироскопа
Математич. основы теории Г. заложены Л. Эйлером в 1765 в его работе «Theoria motus corporum solidorum sue rigidorum». Движение классического Г. описывается системой дифференциальных уравнений 6-го порядка, решение которой стало одной из самых знаменитых математич. задач. Эта задача относится к разделу теории вращательного движения твёрдого тела и является обобщением задач, решаемых до конца простыми средствами классич. анализа. Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18–20 вв. Совр. гироскопич. приборы потребовали решения новых математич. задач. Движение неконтактных Г. с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения Г. с помощью компьютера, можно точно предсказывать положение оси Г. в пространстве. Благодаря этому разработчикам неконтактных Г. не приходится балансировать ротор с точностью 10–10 м, которую невозможно достичь при совр. уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного Г. и вводить соответствующие поправки в программы обработки сигналов Г. Получающиеся с учётом этих поправок уравнения движения Г. оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики. Разработка программ расчёта движения Г. с неконтактными подвесами позволяет существенно повысить точность Г., а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
bigenc.ru
Гироскоп – «Энциклопедия»
ГИРОСКОП (от греческого γ?ρος – круг, окружность и σκοπ?ω – наблюдать), устройство, совершающее быстрые циклические (вращательные или колебательные) движения и чувствительное вследствие этого к повороту в инерциальном пространстве. Термин «гироскоп» предложен в 1852 году Ж. Б. Л. Фуко для изобретённого им прибора, предназначенного для демонстрации вращения Земли вокруг своей оси. Долгое время термин «гироскоп» использовался для обозначения быстровращающегося симметричного твёрдого тела. В современной технике гироскоп – основной элемент всевозможных гироскопических устройств или приборов, широко применяемых для автоматического управления движением самолётов, судов, торпед, ракет, космических аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих других случаях (например, при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
Классический гироскоп. Согласно законам ньютоновской механики скорость поворота оси быстровращающегося симметричного твёрдого тела в пространстве обратно пропорциональна его собственной угловой скорости и, следовательно, ось гироскопа поворачивается столь медленно, что на некотором интервале времени её можно использовать в качестве указателя неизменного направления в пространстве.
Реклама
 Простейшим гироскопом является волчок, парадоксальность поведения которого заключается в его сопротивлении изменению направления оси вращения. Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией гироскопа. Если к оси быстро вращающегося свободного гироскоп придожить пару сил {Р, Р’}, Р’ = -Р, с моментом М = Ph, где h – плечо пары сил (рис. 1), то (против ожидания) гироскоп начнёт дополнительно поворачиваться не вокруг оси х, перпендикулярной к плоскости пары сил, а вокруг оси у, лежащей в этой плоскости и перпендикулярной оси z вращения гироскопа. Если в какой-либо момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение гироскопа безынерционно. Чтобы ось гироскопа могла свободно поворачиваться в пространстве, гироскоп обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрическими шарнирами. Обычно при отсутствии технологических погрешностей оси рамок карданового подвеса пересекаются в одной точке – центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Гироскоп, у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классического гироскопа – задача динамики твёрдого тела.
Простейшим гироскопом является волчок, парадоксальность поведения которого заключается в его сопротивлении изменению направления оси вращения. Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией гироскопа. Если к оси быстро вращающегося свободного гироскоп придожить пару сил {Р, Р’}, Р’ = -Р, с моментом М = Ph, где h – плечо пары сил (рис. 1), то (против ожидания) гироскоп начнёт дополнительно поворачиваться не вокруг оси х, перпендикулярной к плоскости пары сил, а вокруг оси у, лежащей в этой плоскости и перпендикулярной оси z вращения гироскопа. Если в какой-либо момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение гироскопа безынерционно. Чтобы ось гироскопа могла свободно поворачиваться в пространстве, гироскоп обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрическими шарнирами. Обычно при отсутствии технологических погрешностей оси рамок карданового подвеса пересекаются в одной точке – центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Гироскоп, у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классического гироскопа – задача динамики твёрдого тела.
 Основной количественной характеристикой ротора механического гироскопа является его вектор собственного кинетического момента, называемого также моментом количества движения или моментом импульса,
Основной количественной характеристикой ротора механического гироскопа является его вектор собственного кинетического момента, называемого также моментом количества движения или моментом импульса,
Η = ΙΩ, (1)
где I – момент инерции ротора гироскопа относительно оси собственного вращения, Ω – угловая скорость собственного вращения гироскопа относительно оси симметрии.
Медленное движение вектора собственного кинетического момента гироскопа под действием моментов внешних сил, называемое прецессией гироскопа, описывается уравнением
ω x Η = Μ, (2)
где ω – вектор угловой скорости прецессии, Н – вектор собственного кинетического момента гироскопа, М – ортогональная к Н составляющая вектора момента внешних сил, приложенных к гироскопу.
Момент сил, приложенных со стороны ротора к подшипникам оси собственного вращения ротора, возникающий при изменении направления оси и определяемый уравнением
Мg = -М = Η x ω, (3)
называется гироскопическим моментом.
Кроме медленных прецессионных движений ось гироскопа может совершать быстрые колебания с малой амплитудой и высокой частотой – так называемые нутации. Для свободного гироскопа с динамически симметричным ротором в безынерционном подвесе частота нутационных колебаний определяется формулой
V = Н/А,
где А – момент инерции ротора относительно оси, ортогональной оси собственного вращения и проходящей через центр масс ротора. При наличии сил трения нутационные колебания обычно достаточно быстро затухают.
Погрешность гироскопа измеряется скоростью ухода его оси от первоначального положения. Согласно уравнению (2) величина ухода, называемого также дрейфом, пропорциональна моменту сил М относительно центра подвеса гироскопа:
ωух = М/Н (4)
 Уход ωух обычно измеряется в угловых градусах в час. Из формулы (4) следует, что свободный гироскоп функционирует идеально лишь в том случае, если внешний момент М равен 0. При этом угловая скорость прецессии обращается в нуль и ось собственного вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Уход ωух обычно измеряется в угловых градусах в час. Из формулы (4) следует, что свободный гироскоп функционирует идеально лишь в том случае, если внешний момент М равен 0. При этом угловая скорость прецессии обращается в нуль и ось собственного вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Однако на практике любые средства, используемые для подвеса ротора гироскопа, являются причиной возникновения нежелательных внешних моментов неизвестной величины и направления. Формула (4) определяет пути повышения точности механического гироскопа: надо уменьшить «вредный» момент сил М и увеличить кинетический момент Н. При выборе угловой скорости гироскопа необходимо учитывать одно из главных ограничений, связанных с пределами прочности материала ротора из-за возникающих при вращении центробежных сил. При разгоне ротора выше так называемой допускаемой угловой скорости начинается процесс его разрушения.
Лучшие современные гироскопы имеют случайный уход порядка 10-4-10-5 °/ч. Ось гироскопа с погрешностью 10-5 °/ч совершает полный оборот на 360° за 4 тысячи лет! Точность балансировки гироскопа с погрешностью 10-5 °/ч должна быть выше одной десятитысячной доли микрометра (10-10 м), то есть смещение центра масс ротора из центра подвеса не должно превышать величину порядка диаметра атома водорода.
Гироскопические устройства можно разделить на силовые и измерительные. Силовые устройства служат для создания моментов сил, приложенных к основанию, на котором установлен гироскопический прибор; измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и тому подобное).
Впервые уравновешенный гироскоп нашёл практическое применение в 1898 году в приборе для стабилизации курса торпеды, изобретённом австрийским инженером Л. Обри. Аналогичные приборы в различных вариантах исполнения начали использовать в 1920-х годах на самолётах для указания курса (гироскоп направления, гирополукомпасы), а позднее для управления движением ракет. На рисунке 3 показан пример применения гироскопа с тремя степенями свободы в авиационном указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создаётся и поддерживается струёй сжатого воздуха, направленной на рифлёную поверхность обода. По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собственного вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
Гирогоризонт, или искусственный горизонт, позволяющий пилоту поддерживать свой самолёт в горизонтальном положении, когда естественный горизонт не виден, основан на использовании гироскопа с вертикальной осью вращения, сохраняющей своё направление при наклонах самолёта. В автопилотах применяются два гироскопа с горизонтальной и вертикальной осями вращения; первый служит для сохранения курса самолёта и управляет вертикальными рулями, второй – для сохранения горизонтального положения самолёта и управляет горизонтальными рулями.
С помощью гироскопа созданы автономные инерциальные навигационные системы (ИНС), предназначенные для определения координат, скорости и ориентации подвижного объекта (корабля, самолёта, космического аппарата и тому подобное) без использования какой-либо внешней информации. В состав ИНС кроме гироскопа входят акселерометры, предназначенные для измерения ускорения (перегрузки) объекта, а также компьютер, интегрирующий по времени выходные сигналы акселерометров и выдающий навигационную информацию с учётом показания гироскопа. К началу 21 века созданы настолько точные ИНС, что дальнейшего повышения точностей для решения многих задач уже не требуется.
Развитие гироскопической техники последних десятилетий сосредоточилось на поиске нетрадиционных областей применения гироскопических приборов – разведка полезных ископаемых, предсказание землетрясений, сверхточное измерение координат железнодорожных путей и нефтепроводов, медицинская техника и многое другое.
Неклассические виды гироскопов. Высокие требования к точности и эксплутационным характеристикам гироскопических приборов привели не только к дальнейшим усовершенствованиям классического гироскопа с вращающимся ротором, но и к поискам принципиально новых идей, позволяющих решить проблему создания чувствительных датчиков для индикации и измерения угловых движений объекта в пространстве. Этому способствовали успехи квантовой электроники, ядерной физики и других областей точных наук.
В гироскопе с воздушной опорой шариковые подшипники, используемые в традиционном кардановом подвесе, заменены «газовой подушкой» (газодинамической опорой). Это полностью устранило износ материала опор во время работы и позволило почти неограниченно увеличить время службы прибора. К недостаткам газовых опор относятся довольно большие потери энергии и возможность внезапного отказа при случайном контакте ротора с поверхностью опоры.
Поплавковый гироскоп представляет собой роторный гироскоп, в котором для разгрузки подшипников подвеса все подвижные элементы взвешиваются в жидкости с большой плотностью так, чтобы вес ротора вместе с кожухом уравновешивался гидростатическими силами. Благодаря этому на много порядков снижается сухое трение в осях подвеса и увеличивается ударная и вибрационная стойкость прибора. Герметичный кожух, выполняющий роль внутренней рамки карданового подвеса, называется поплавком. Ротор гироскопа внутри поплавка вращается на воздушной подушке в аэродинамических подшипниках со скоростью порядка 30-60 тысяч оборотов в минуту. Для повышения точности прибора необходимо использование системы термостабилизации. Поплавковый гироскоп с большим вязким трением жидкости называется также интегрирующим гироскопом.
Динамически настраиваемый гироскоп (ДНГ) принадлежит к классу гироскопа с упругим подвесом ротора, в которых свобода угловых движений оси собственного вращения обеспечивается за счёт упругой податливости конструктивных элементов (например, торсионов). В ДНГ, в отличие от классического гироскопа, используется так называемый внутренних карданов подвес (рис. 4), образованный внутренним кольцом 2, которое изнутри крепится торсионами 4 к валу электродвигателя 5, а снаружи – торсионами 3 к ротору 1. Момент трения в подвесе проявляется только в результате внутреннего трения в материале упругих торсионов. В ДНГ за счёт подбора моментов инерции рамок подвеса и угловой скорости вращения ротора осуществляется компенсация упругих моментов подвеса, приложенных к ротору. К достоинствам ДНГ относятся их миниатюрность, отсутствие подшипников со специфическими моментами трения, присутствующими в классическом кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
Рис. 4. Динамически настраиваемый гироскоп с внутренним кардановым подвесом: 1 – ротор; 2 – внутреннее кольцо; 3 и 4 – торсионы; 5 – электродвигатель.
Кольцевой лазерный гироскоп (КЛГ), называемый также квантовым гироскопом, создан на основе лазера с кольцевым резонатором, в котором по замкнутому оптическому контуру одновременно распространяются встречные электромагнитные волны. К достоинствам КЛГ относятся отсутствие вращающегося ротора, подшипников, подверженных действию сил трения, высокая точность.
Волоконно-оптический гироскоп (ВОГ) представляет собой волоконно-оптический интерферометр, в котором распространяются встречные электромагнитные волны. ВОГ является аналоговым преобразователем угловой скорости вращения основания, на котором он установлен, в выходной электрической сигнал.
Волновой твердотельный гироскоп (ВТГ) основан на использовании инертных свойств упругих волн в твёрдом теле. Упругая волна может распространяться в сплошной среде, не изменяя своей конфигурации. Если возбудить стоячие волны упругих колебаний в осесимметричном резонаторе, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на меньший, но известный угол. Соответствующее движение волны как целого называется прецессией. Скорость прецессии стоячей волны пропорциональна проекции угловой скорости вращения основания на ось симметрии резонатора. К достоинствам ВТГ относятся: высокое отношение точность/цена; способность переносить большие перегрузки, компактность и небольшая масса, низкая энергоёмкость, малое время готовности, слабая зависимость от температуры окружающей среды.
Вибрационный гироскоп (ВГ) основан на свойстве камертона сохранять плоскость колебаний своих ножек. В ножке колеблющегося камертона, установленного на платформе, вращающейся вокруг оси симметрии камертона, возникает периодических момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного гироскопа стимулировала целое направление поисков новых типов гироскопов, использующих пьезоэлектрический эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и тому подобное.
Микромеханический гироскоп (ММГ) относится к гироскопам низких точностей (ниже 10-1 °/ч). Эта область традиционно считалась малоперспективной для задач управления движущимися объектами и навигации. Но в конце 20 века разработка ММГ стала одним из наиболее интенсивно разрабатываемых направлений гироскопической техники, тесно связанным с современными кремниевыми технологиями. ММГ представляет собой своеобразный электронный чип с кварцевой подложкой площадью в несколько квадратных миллиметров, на которую методом фотолитографии наносится плоский вибратор типа камертона. Точность современных ММГ невелика и достигает 101-102 °/ч, однако решающее значение имеет исключительно низкая стоимость микромеханических чувствительных элементов. Благодаря использованию хорошо отработанных современных технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнические устройства и даже детские игрушки.
Неконтактный гироскоп относится к гироскопическим устройствам сверхвысоких точностей (10-6-5·10-4 °/ч). Разработка гироскопа с неконтактными подвесами началась в середине 20 века. В неконтактных подвесах реализуется состояние левитации, т. е. состояние, при котором ротор гироскопа «парит» в силовом поле подвеса без какого-либо механического контакта с окружающими телами. Среди неконтактных гироскопов выделяют гироскопы с электростатическим, магнитным и криогенным подвесами ротора. В электростатическом гироскопе проводящий бериллиевый сферический ротор подвешен в вакуумированной полости в регулируемом электрическом поле, создаваемом системой электродов. В криогенном гироскопе сверхпроводящий ниобиевый сферический ротор подвешен в магнитном поле; рабочий объём гироскопа охлаждается до сверхнизких температур, так, чтобы ротор перешёл в сверхпроводящее состояние. Гироскоп с магниторезонансным подвесом ротора является аналогом гироскопа с электростатическим подвесом ротора, в котором электрическое поле заменено магнитным, а бериллиевый ротор – ферритовым. Современные гироскопы с неконтактными подвесами – это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
Кроме перечисленных выше типов гироскопов проводились и проводятся работы над экзотическими типами гироскопа, такими, как ионный гироскоп, ядерный гироскоп и др.
Математические задачи в теории гироскопа. Математические основы теории гироскопа заложены Л. Эйлером в 1765 году в его работе «Theoria motus corporum solidorum sue rigidorum». Движение классического гироскопа описывается системой дифференциальных уравнений 6-го порядка, решение которой стало одной из самых знаменитых математических задач. Эта задача относится к разделу теории вращательного движения твёрдого тела и является обобщением задач, решаемых до конца простыми средствами классического анализа. Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18-20 века. Современные гироскопические приборы потребовали решения новых математических задач. Движение неконтактных гироскопов с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения гироскопа с помощью компьютера, можно точно предсказывать положение оси гироскопа в пространстве. Благодаря этому разработчикам неконтактных гироскопов не приходится балансировать ротор с точностью 10-10 м, которую невозможно достичь при современном уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного гироскопа и вводить соответствующие поправки в программы обработки сигналов гироскопа. Получающиеся с учётом этих поправок уравнения движения гироскопа оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики. Разработка программ расчёта движения гироскопа с неконтактными подвесами позволяет существенно повысить точность гироскопа, а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
Лит.: Магнус К. Гироскоп. Теория и применение. М., 1974; Ишлинский А. Ю. Ориентация, гироскопы и инерциальная навигация. М., 1976; Климов Д. М., Харламов С. А. Динамика гироскопа в кардановом подвесе. М., 1978; Ишлинский А. Ю., Борзов В. И., Степаненко Н. П. Лекции по теории гироскопов. М., 1983; Новиков Л. З., Шаталов М. Ю. Механика динамически настраиваемых гироскопов. М., 1985; Журавлев В. Ф., Климов Д. М. Волновой твердотельный гироскоп. М., 1985; Мартыненко Ю. Г. Движение твердого тела в электрических и магнитных полях. М., 1988.
Ю. Г. Мартыненко.
knowledge.su