
Как найти модуль скорости
Как определяется модуль и направление скорость точки при координатном способе задания движения?
Какие способы задания движения точки применяются в кинематике и в чем они состоят? Как определить траекторию при координатном способе задания точки?
Движение точки в пространстве определяется тремя основными способами: векторным, координатным и естественным.
Векторный: выберем некоторый неподвижный центр О и проведём из центра в точку М, движение которой изучаем, радиус-вектор r. При движении точки М радиус-вектор изменяется по величине и направлению.
Каждому моменту времени t соответствует определённое значение r. Следовательно, радиус-вектор однозначно определяет положение точки М.
таким образом, чтобы определить движение точки, нужно задать её радиус-вектор в виде однозначной и непрерывной функции времени r: r=r(t).
Координатный: Если координаты точки заданы как однозначные функции времени: x=x(t), y=y(t), z=z(t), то положение точки М в пространстве известно в каждый момент времени. Эти уравнения определяют закон движение точки и называются уравнениями её движения.
Естественный: этот способ задания движения применяется в том случае, когда траектория точки, относительно выбранной системы отсчёта, известна.
При движении точки М криволинейная координата s будет изменяться с течением времени, то есть: s=s(t). Зная это уравнение, можно определить положение точки в каждый момент времени.
Его называют уравнением движение или законом движения вдоль заданной траектории.
Зададим положение точки в пространстве координатным особом: x=x(t), y=y(t), z=z(t) (*). Чтобы определить положение точки в начальный момент времени (t=0) необходимо в уравнения (*) подставить t=0.
Теперь, для определения траектории точки: s=s(t) воспользуемся формулой длины дуги кривой:или, с учётом того, что дифференцирование производиться по времени, можно переписать так:.
Знак «+» берётся в том случае, когда точка движется в сторону с положительного отсчёта криволинейной координаты s.
Какая зависимость существует между радиус-вектором движущейся точки и вектором скорости этой точки? Как направлен вектор скорости криволинейного движения точки по отношению к её траектории?
Разложим радиус векторпо ортам декартовой системы координат:. Теперь продифференцируем равенство по времени.
В результате получим разложение скорости по ортам:, разложение можно представить так:, где,,- проекции вектора скорости на оси координат.
Таким образом, проекции скорости на неподвижные декартовы оси координат равны первым производным по времени соответствующих координат движущейся точки.
При векторном: Для того, чтобы точно вычислить скорость точки в данный момент времени, необходимо перейти в формулеперейти к пределу при стремлении промежутка времени к нулю, то есть:.
Этот предел представляет собой первую векторную производную по времени от радиус-вектора точки по времени.
Как следует из этих формул, вектор скорости направлен по касательной к траектории точки в сторону её движения.
При координатном: Найдём модуль скорости, зная её проекции:. Для определения направления вектора скорости воспользуемся направляющими косинусами:
,,. В итоге мы всё же прижжем к выводу, что вектор скорости направлен по касательной к траектории.
При естественном:, известно, что. Векторесть единичный вектор касательной к траектории (её орт), направленный в сторону возрастания криволинейной координаты s. Обозначая орт касательнойзапишем начальную формулу так:, домножим левую и правую часть уравнения на единичный вектор:. Перепишет выражение так:. Таким образом, видно, что вектор скорости направлено по касательной к траектории точки.
Как определяется модуль и направление скорость точки при координатном способе задания движения?
,,Таким образом, проекции скорости на неподвижные декартовы оси координат равны первым производным по времени от соответствующих координат движущейся точки. Из равенств следует, что проекции скорости точки на координатные оси равны скорости проекций этой точки на те же оси. Зная проекции вектора скорости точки, найдём его модуль:.
Для определения направления вектора скорости воспользуемся направляющими косинусами:
,,.
Какая зависимость существует между радиус-вектором движущейся точки и вектором ускорения точки? Как направлен вектор ускорения криволинейного движения точки по отношению к её траектории, в какой плоскости он лежит?
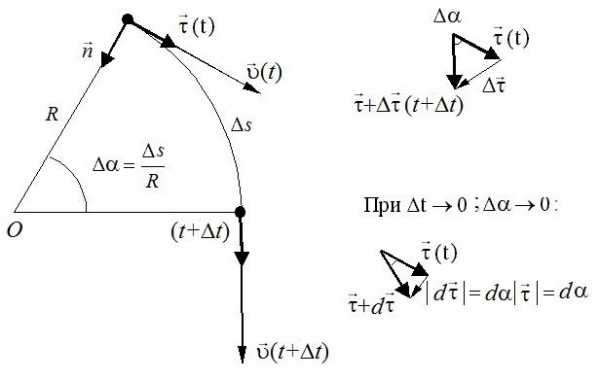
, при стремлениик нулю получаем следующий предел:, этот предел называют ускорение точки в данный момент времени. Так как вектор скорости есть первая производная радиус-вектора точки по времени, то:. Таким образом, ускорение точки в данный момент времени, есть векторная величина, равная первой производной от вектора скорости или второй производной от радиус-вектора по времени.
Установим теперь положение вектораотносительно траектории. Отметим, что плоскость треугольника МАВ, образованного векторами,и, прибудет поворачиваться вокруг вектора, т.е. вокруг касательной к траектории в точке М, и займёт в пределе определённое предельной положение. Это предельное положение плоскости МАВ называется соприкасающейся плоскостью в точке М траектории.
Вектор среднего ускорениянаправлен так же, как и, т.е. в сторону вогнутости кривой, и всё время находиться в плоскости треугольника МАВ. Предел вектораприесть вектор, который расположен в предельном положении треугольника МАВ, т.е. в соприкасающейся плоскости траектории точки М.
Итак, вектор полного ускорения точки находиться в соприкасающейся плоскости траектории точки М направлен в сторону вогнутости траектории.
Источник: https://megaobuchalka.ru/5/34383.html
модуль скорости — это… Что такое модуль скорости?
- модуль пластичности
- Модуль сдвига — Сдвиговая деформация В материаловедении модулем сдвига (обозначается буквой G или μ), называется отношение касательного напряжения к сдвиговой деформации … Википедия
- модуль пластичности — [modulus of plasticity (ductility)] коэффициент пропорциональности между напряжением и степенью пластической деформации, определяемый по кривым упрочнения. Имеет размерность напряжения. По аналогии с модулем упругости различают модуль… … Энциклопедический словарь по металлургии
- Абсолютная относительная и переносная скорости — Скорость (часто обозначается , от англ. velocity или фр. vitesse) векторная величина, характеризующая быстроту перемещения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта. Этим же словом может… … Википедия
- Вектор скорости — Скорость (часто обозначается , от англ. velocity или фр. vitesse) векторная величина, характеризующая быстроту перемещения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта. Этим же словом может… … Википедия
- ЦИРКУЛЯЦИЯ СКОРОСТИ — кинематич. характеристика течения жидкости или газа, к рая служит мерой завихренности течения. Ц. с. связана с вращением элементарного объёма жидкости (газа) при его деформации в процессе движения. Если скорости всех жидких ч ц, расположенных на… … Физическая энциклопедия
- Синхронный транспортный модуль — Эту статью следует викифицировать. Пожалуйста, оформите её согласно правилам оформления статей … Википедия
- Доплеровский измеритель скорости и сноса — (ДИСС) бортовое радиолокационное устройство, основанное на использовании эффекта Доплера, предназначенное для автоматического непрерывного измерения и индикации составляющих вектора скорости, модуля путевой скорости, угла сноса и координат… … Википедия
- Синхронный транспортный модуль — 3.11 Синхронный транспортный модуль (STM) информационная структура, используемая в СЦИ для поддержки соединений на уровне секции. Состоит из информационной нагрузки и секционного заголовка (SOH), входящих в структуру цикла, который повторяется… … Словарь-справочник терминов нормативно-технической документации
- синхронный транспортный модуль порядка N (системы передачи железнодорожного транспорта) — Информационная структура, используемая для поддержки соединений на уровне секций СЦИ, состоящая из секционного заголовка и информационной нагрузки, организованных в блочную цикличную структуру, которая повторяется каждые 125 мкс. Примечания 1.… … Справочник технического переводчика
- синхронный транспортный модуль порядка N (системы передачи железнодорожного транспорта) — 94 синхронный транспортный модуль порядка N (системы передачи железнодорожного транспорта): Информационная структура, используемая для поддержки соединений на уровне секций СЦИ, состоящая из секционного заголовка и информационной нагрузки,… … Словарь-справочник терминов нормативно-технической документации
Источник: https://geography_russian_kazakh.academic.ru/7417/%D0%BC%D0%BE%D0%B4%D1%83%D0%BB%D1%8C_%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D0%B8
Средний модуль скорости
| Главная | Обратная связь |
| АрхеологияАрхитектураАстрономияАудитБиологияБотаникаБухгалтерский учётВойное делоГенетикаГеографияГеологияДизайнИскусствоИсторияКиноКулинарияКультураЛитератураМатематикаМедицинаМеталлургияМифологияМузыкаПсихологияРелигияСпортСтроительствоТехникаТранспортТуризмУсадьбаФизикаФотографияХимияЭкологияЭлектричествоЭлектроникаЭнергетика | КИНЕМАТИКАДвижение с постоянным ускорением
Свободное падение тел
Средний модуль скорости
|
©2015 studopedya.ru Все права принадлежат авторам размещенных материалов.
Источник: http://studopedya.ru/1-78205.html
Большая Энциклопедия Нефти и Газа
Cтраница 1
Модуль скорости v частицы меняется со временем t по закону vat — — b, где а и Ъ — положительные постоянные. Найти тангенциальное шт и нормальное wn ускорения, а также радиус кривизны R траектории в зависимости от времени. [1]
Модуль скорости 1с, как определено в предыдущей задаче, для данного положения механизма равен 130т; см / сек. [2]
Модуль скорости г в, как мы уже определили, равен 460 см / сек. [3]
Модуль скорости, вообще говоря, не совпадает с производной по времени dr / dt модуля радиуса-вектора частицы. [4]
Модуль скорости v здесь должен быть вычислен по формуле (6.13), а знак берется в соответствии с выбором положительного направления отсчета дуг траектории. [5]
Модуль скорости равен модулю производной от закона движения точки по времени. [6]
Модуль скорости, конечно, остается постоянным и во внешней системе координат, так как модуль вектора — абсолютный скаляр, не зависящий от выбора координатной системы. [7]
Модуль скорости v здесь должен быть вычислен по формуле (6.13), а знак берется в соответствии с выбором положительного направления отсчета дуг траектории. [8]
Модуль скорости т, связанный с изменением энергии активации микрообъема ( т / ( / а, где а. С макроскопической точки зрения т характеризует собой зависимость между установившейся скоростью неупругой деформации и напряжением, соответствующим этой скорости. [9]
Модуль скорости равен модулю производной от закона движения точки по времени. [10]
Модуль скорости т, входящий в уравнение ( 40), представляет собой величину, равную k Т la, где а — константа, связанная с характеристиками микрочастиц, т характеризует зависимость между установившейся скоростью высокоэластической деформации и соответствующим этой скорости напряжением.
Количественная интерпретация этой константы связана с изменением величины максимального напряжения, вызванного увеличением скорости деформирования в е раз.
Модуль скорости практически не зависит от конформации полимерной цепи и от структуры полимера, подразумевая под этим более крупные надмолекулярные образования. [11]
Модуль скорости т, входящий в уравнение ( 40), представляет собой величину, равную kTIa, где а — константа, связанная с характеристиками микрочастиц, т характеризует зависимость между установившейся скоростью высокоэластической деформации и соответствующим этой скорости напряжением.
Количественная интерпретация этой константы связана с изменением величины максимального напряжения, вызванного увеличением скорости деформирования в е раз.
Модуль скорости практически не зависит от конформации полимерной цепи и от структуры полимера, подразумевая под этим более крупные надмолекулярные образования. [12]
| Зависимость параметров труб круглого сечения от наполнения. [13] |
Модуль скорости w имеет ту же единицу измерения, что и скорость; модуль расхода К-ту же единицу измерения, что и расход. [14]
Модуль скорости равен геометрической сумме ее составляющих. [15]
Страницы: 1 2 3 4
Источник: http://www.ngpedia.ru/id160862p1.html
Ускорение
«Класс!ная физика» — на Youtube
«Физика — 10 класс»
Как изменяются показания спидометра в начале движения и при торможении автомобиля?
Какая физическая величина характеризует изменение скорости?
При движении тел их скорости обычно меняются либо по модулю, либо по направлению, либо жеодновременно как по модулю, так и по направлению.
Скорость шайбы, скользящей по льду, уменьшается с течением времени до полной остановки. Если взять в руки камень и разжать пальцы, то при падении камня его скорость постепенно нарастает.
Скорость любой точки окружности точильного круга при неизменном числе оборотов в единицу времени меняется только по направлению, оставаясь постоянной по модулю (рис 1.26).
Если бросить камень под углом к горизонту, то его скорость будет меняться и по модулю, и по направлению.
Изменение скорости тела может происходить как очень быстро (движение пули в канале ствола при выстреле из винтовки), так и сравнительно медленно (движение поезда при его отправлении).
Физическая величина, характеризующая быстроту изменения скорости, называется ускорением.
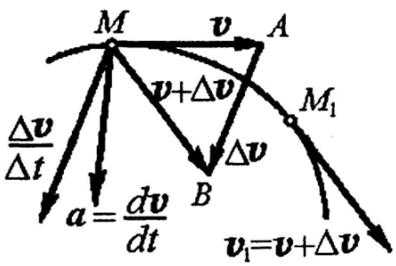
Рассмотрим случай криволинейного и неравномерного движения точки. В этом случае её скорость с течением времени изменяется как по модулю, так и по направлению.
Пусть в некоторый момент времени t точка занимает положение М и имеет скорость (рис. 1.27). Спустя промежуток времени Δt точка займёт положение М1 и будет иметь скорость 1. Изменение скорости за время Δt1 равно Δ1 = 1 — .
Вычитание вектора можно произвести путём прибавления к вектору 1 вектора (-):
Δ1 = 1 — = 1 + (-).
Согласно правилу сложения векторов вектор изменения скорости Δ1 направлен из начала вектора 1 в конец вектора (-), как это показано на рисунке 1.28.
Поделив вектор Δ1 на промежуток времени Δt1 получим вектор, направленный так же, как и вектор изменения скорости Δ1. Этот вектор называют средним ускорением точки за промежуток времени Δt1. Обозначив его через cр1, запишем:
По аналогии с определением мгновенной скорости определим мгновенное ускорение. Для этого найдём теперь средние ускорения точки за всё меньшие и меньшие промежутки времени:
При уменьшении промежутка времени Δt вектор Δ уменьшается по модулю и меняется по направлению (рис. 1.29). Соответственно средние ускорения также меняются по модулю и направлению.
Но при стремлении промежутка времени Δt к нулю отношение изменения скорости к изменению времени стремится к определённому вектору как к своему предельному значению.
В механике эту величину называют ускорением точки в данный момент времени или просто ускорением и обозначают .
Ускорение точки — это предел отношения изменения скорости Δ к промежутку времени Δt, в течение которого это изменение произошло, при стремлении Δt к нулю.
Ускорение направлено так, как направлен вектор изменения скорости Δ при стремлении промежутка времени Δt к нулю.
В отличие от направления скорости, направление вектора ускорения нельзя определить, зная траекторию точки и направление движения точки по траектории.
В дальнейшем на простых примерах мы увидим, как можно определить направление ускорения точки при прямолинейном и криволинейном движениях.
В общем случае ускорение направлено под углом к вектору скорости (рис. 1.30). Полное ускорение характеризует изменение скорости и по модулю, и по направлению. Часто полное ускорение считается равным векторной сумме двух ускорений — касательного (к) и центростремительного (цс).
Касательное ускорение к характеризует изменение скорости по модулю и направлено по касательной к траектории движения. Центростремительное ускорение цс характеризует изменение скорости по направлению и перпендикулярно касательной, т. е. направлено к центру кривизны траектории в данной точке.
В дальнейшем мы рассмотрим два частных случая: точка движется по прямой и скорость изменяется только по модулю; точка движется равномерно по окружности и скорость изменяется только по направлению.
Единица ускорения.
Движение точки может происходить как с переменным, так и с постоянным ускорением. Если ускорение точки постоянно, то отношение изменения скорости к промежутку времени, за которое это изменение произошло, будет одним и тем же для любого интервала времени. Поэтому, обозначив через Δt некоторый произвольный промежуток времени, а через Δ — изменение скорости за этот промежуток, можно записать:
Так как промежуток времени Δt — величина положительная, то из этой формулы следует, что если ускорение точки с течением времени не изменяется, то оно направлено так же, как и вектор изменения скорости. Таким образом, если ускорение постоянно, то его можно истолковать как изменение скорости в единицу времени. Это позволяет установить единицы модуля ускорения и его проекций.
Запишем выражение для модуля ускорения:
Отсюда следует, что: модуль ускорения численно равен единице, если за единицу времени модуль вектора изменения скорости изменяется на единицу.
Если время измерено в секундах, а скорость — в метрах в секунду, то единица ускорения — м/с2 (метр на секунду в квадрате).
Источник: «Физика — 10 класс», 2014, учебник Мякишев, Буховцев, Сотский
Следующая страница «Движение с постоянным ускорением»
Назад в раздел «Физика — 10 класс, учебник Мякишев, Буховцев, Сотский»
Кинематика — Физика, учебник для 10 класса — Класс!ная физика
Физика и познание мира — Что такое механика — Механическое движение. Система отсчёта — Способы описания движения — Траектория. Путь. Перемещение — Равномерное прямолинейное движение. Скорость.
Уравнение движения — Примеры решения задач по теме «Равномерное прямолинейное движение» — Сложение скоростей — Примеры решения задач по теме «Сложение скоростей» — Мгновенная и средняя скорости — Ускорение — Движение с постоянным ускорением — Определение кинематических характеристик движения с помощью графиков — Примеры решения задач по теме «Движение с постоянным ускорением» — Движение с постоянным ускорением свободного падения — Примеры решения задач по теме «Движение с постоянным ускорением свободного падения» — Равномерное движение точки по окружности — Кинематика абсолютно твёрдого тела. Поступательное и вращательное движение — Кинематика абсолютно твёрдого тела. Угловая скорость. Связь между линейной и угловой скоростями — Примеры решения задач по теме «Кинематика твёрдого тела»
Устали? — Отдыхаем!
Вверх
Источник: http://class-fizika.ru/10_a10.html
Ускорение
| Скачать все статьи раздела КИНЕМАТИКА |
Ускорение – это величина, которая характеризует быстроту изменения скорости.
Например, автомобиль, трогаясь с места, увеличивает скорость движения, то есть движется ускоренно. Вначале его скорость равна нулю. Тронувшись с места, автомобиль постепенно разгоняется до какой-то определённой скорости. Если на его пути загорится красный сигнал светофора, то автомобиль остановится.
Но остановится он не сразу, а за какое-то время. То есть скорость его будет уменьшаться вплоть до нуля – автомобиль будет двигаться замедленно, пока совсем не остановится. Однако в физике нет термина «замедление».
Если тело движется, замедляя скорость, то это тоже будет ускорение тела, только со знаком минус (как вы помните, скорость – это векторная величина).
Среднее ускорение
Среднее ускорение> – это отношение изменения скорости к промежутку времени, за который это изменении произошло. Определить среднее ускорение можно формулой:
где– вектор ускорения.
Направление вектора ускорения совпадает с направлением изменения скорости Δ=-0 (здесь0 – это начальная скорость, то есть скорость, с которой тело начало ускоряться).
В момент времени t1 (см. рис 1.8) тело имеет скорость0. В момент времени t2 тело имеет скорость. Согласно правилу вычитания векторов найдём вектор изменения скорости Δ=-0. Тогда определить ускорение можно так:
Рис. 1.8. Среднее ускорение.
В СИ единица ускорения – это 1 метр в секунду за секунду (или метр на секунду в квадрате), то есть
Метр на секунду в квадрате равен ускорению прямолинейно движущейся точки, при котором за одну секунду скорость этой точки увеличивается на 1 м/с. Иными словами, ускорение определяет, насколько изменяется скорость тела за одну секунду. Например, если ускорение равно 5 м/с2, то это означает, что скорость тела каждую секунду увеличивается на 5 м/с.
Мгновенное ускорение
Мгновенное ускорение тела (материальной точки) в данный момент времени – это физическая величина, равная пределу, к которому стремится среднее ускорение при стремлении промежутка времени к нулю. Иными словами – это ускорение, которое развивает тело за очень короткий отрезок времени:
Направление ускорения также совпадает с направлением изменения скорости Δпри очень малых значениях промежутка времени, за который происходит изменение скорости. Вектор ускорения может быть задан проекциями на соответствующие оси координат в данной системе отсчёта (проекциями аХ, aY, aZ).
При ускоренном прямолинейном движении скорость тела возрастает по модулю, то есть
v2 > v1а направление вектора ускорения совпадает с вектором скорости2.
Если скорость тела по модулю уменьшается, то есть v2 замедление движения, при этом ускорение будет отрицательным (а
Рис. 1.9. Мгновенное ускорение.
При движении по криволинейной траектории изменяется не только модуль скорости, но и её направление. В этом случае вектор ускорение представляют в виде двух составляющих (см. следующий раздел).
Тангенциальное ускорение
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.
Рис. 1.10. Тангенциальное ускорение.
Направление вектора тангенциального ускоренияτ (см. рис. 1.10) совпадает с направлением линейной скорости или противоположно ему. То есть вектор тангенциального ускорения лежит на одной оси с касательной окружности, которая является траекторией движения тела.
Нормальное ускорение
Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела.
То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквойn.
Вектор нормального ускорения направлен по радиусу кривизны траектории.
Полное ускорение
Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
(согласно теореме Пифагора для прямоугольно прямоугольника).
Направление полного ускорения также определяется правилом сложения векторов:
= τ + n
Источник: http://av-physics.narod.ru/mechanics/acceleration.htm
__________________________________________novpedkolledg2.ru
Как найти модуль скорости | Сделай все сам
Скорость тела характеризуется направлением и модулем. Иными словами, модуль скорости – это число, которое показывает, насколько стремительно тело передвигается в пространстве. Перемещение полагает метаморфоза координат.

Инструкция
1. Введите систему координат, касательно которой вы будете определять направление и модуль скорости . Если в задаче теснее задана формула зависимости скорости от времени, вводить систему координат не надобно – предполагается, что она теснее есть.
2. По имеющейся функции зависимости скорости от времени дозволено обнаружить значение скорости в всякий момент времени t. Пускай, скажем, v=2t?+5t-3. Если требуется обнаружить модуль скорости в момент времени t=1, примитивно подставьте это значение в уравнение и посчитайте v: v=2+5-3=4.
3. Когда задача требует обнаружить скорость в исходный момент времени, подставьте в функцию t=0. Таким же образом дозволено обнаружить время, подставив вестимую скорость. Так, в конце пути тело остановилось, то есть, его скорость стала равна нулю. Тогда 2t?+5t-3=0. Отсель t=[-5±?(25+24)]/4=[-5±7]/4. Получается, что либо t=-3, либо t=1/2, а от того что время не может быть негативным, остается только t=1/2.
4. Изредка в задачах уравнение скорости дается в завуалированной форме. Скажем, в условии сказано, что тело двигалось равноускоренно с негативным убыстрением -2 м/с?, а в первоначальный момент скорость тела составляла 10 м/с. Негативное убыстрение обозначает, что тело равномерно замедлялось. Из этих условий дозволено составить уравнение для скорости : v=10-2t. С всей секундой скорость будет уменьшаться на 2 м/с, пока тело не остановится. В конце пути скорость обнулится, следственно легко обнаружить всеобщее время движения: 10-2t=0, откуда t=5 секунд. Через 5 секунд позже начала движения тело остановится.
5. Помимо откровенного движения тела, существует еще и движение тела по окружности. В всеобщем случае оно является криволинейным. Тут появляется центростремительное убыстрение, которое связано с линейной скоростью формулой a(c)=v?/R, где R – радиус. Комфортно рассматривать также угловую скорость ?, причем v=?R.
Модуль числа n представляет собой число единичных отрезков от начала координат до точки n. Причем не главно, в какую сторону будет отсчитываться это расстояние – вправо либо налево от нуля.
Инструкция
1. Модуль числа также принято называть безусловной величиной этого числа . Он обозначается короткими вертикальными линиями, проведенными слева и справа от числа . Скажем, модуль числа 15 записывается дальнейшим образом: |15|.
2. Помните, что модуль может быть только позитивным числом либо нулем. Модуль позитивного числа равен самому числу. Модуль нуля равен нулю. То есть для всякого числа n, которое огромнее либо равно нулю, будет объективна дальнейшая формула |n| = n. Скажем, |15| = 15, то есть модуль числа 15 равен 15-ти.
3. Модулем негативного числа будет то же число, но с противоположным знаком. То есть для всякого числа n, которое поменьше нуля, будет объективна формула |n| = -n. Скажем, |-28| = 28. Модуль числа -28 равен 28-ми.
4. Дозволено находить модули не только для целых, но и для дробных чисел. Причем в отношении дробных чисел действуют те же правила. Скажем, |0,25| = 25, то есть модуль числа 0,25 будет равен 0,25. А |-?| = ?, то есть модуль числа -? будет равен ?.
5. При работе с модулями пригодно знать, что модули противоположных чисел неизменно равны друг другу, то есть |n| =|-n|. Это является основным свойством модулей. Скажем, |10| = |-10|. Модуль числа 10 равен 10-ти, верно так же, как модуль числа -10. Помимо того, |a — b| = |b — a|, потому что расстояние от точки a до точки b и расстояние от b до a равны друг другу. Скажем, |25 — 5| = |5 — 25|, то есть |20| = |- 20|.
Для нахождения метаморфозы скорости определитесь с типом движения тела. В случае если движение тела равномерно, изменение скорости равно нулю. Если тело движется с убыстрением, то изменение его скорости в весь момент времени дозволено узнать, если отнять от мгновенной скорости в данный момент времени его исходную скорость.
Вам понадобится
- секундомер, спидометр, радар, рулетка, акселерометр.
Инструкция
1. Определение метаморфозы скорости произвольно движущегося по прямой траекторииС поддержкой спидометра либо радара измерьте скорость тела в начале и конце отрезка пути. После этого от финального итога отнимите первоначальный, это и будет изменение скорости тела.
2. Определение метаморфозы скорости тела, движущегося с ускорениемНайдите убыстрение тела. Используйте акселерометр либо динамометр. Если знаменита масса тела, тогда силу, действующую на тело, поделите на его массу (a=F/m). Позже этого измерьте время, за которое происходил процесс метаморфозы скорости . Дабы обнаружить изменение скорости , умножьте значение убыстрения на время, за которое происходило это изменение (?v=a•t). Если убыстрение измерить в метрах на секунду в квадрате, а время — в секундах, то скорость получится в метрах на секунду. Если нет вероятности замерить время, но вестимо, что скорость менялась на определенном отрезке пути, спидометром либо радаром, измерьте скорость в начале этого отрезка, после этого с поддержкой рулетки либо дальномера измерьте длину этого пути и убыстрение. Любым из вышеописанных способов измерьте убыстрение, которое действовало на тело. Позже этого обнаружьте финальную скорость тела в конце участка пути. Для этого возведите исходную скорость в квадрат, прибавьте к ней произведение длины участка на убыстрение и число 2. Из итога извлеките квадратный корень. Дабы обнаружить изменение скорости , от полученного итога отнимите значение исходной скорости .
3. Определение метаморфозы скорости тела при поворотеЕсли изменилась не только величина, но и направление скорости , то обнаружьте ее изменение через векторную разность исходной и финальной скорости . Для этого измерьте угол между векторами. После этого от суммы квадратов скоростей отнимите удвоенное их произведение, умноженное на косинус угла между ними: v1?+v2?-2v1v2•Cos(?). Из полученного числа извлеките квадратный корень.
Видео по теме
Для определения скорости разных видов движения потребуются различные формулы. Дабы определить скорость равномерного движения, расстояние поделите на время его прохождения. Среднюю скорость движения находите сложением всех отрезков, которое прошло тело, на всеобщее время движения. При равноускоренном движении узнайте убыстрение, с которым двигалось тело, а при свободном падении высоту, с которой оно предисловие движение.

Вам понадобится
- дальномер, секундомер, акселерометр.
Инструкция
1. Скорость равномерного движения и средняя скоростьИзмерьте расстояние с поддержкой дальномера, которое прошло тело, а время, за которое оно его одолело, с поддержкой секундомера. Позже этого поделите расстояние, пройденное телом на время его прохождения, итогом будет скорость равномерного движения (v=S/t). Если тело движется неравномерно, произведите те же измерения и примените ту же формулу — тогда получите среднюю скорость тела. Это значит, что если бы тело по данному отрезку пути двигалось с полученной скоростью, оно было бы в пути время, равное измеренному. Если тело движется по окружности, измерьте ее радиус и время прохождения полного цикла, после этого радиус умножьте на 6,28 и поделите на время (v=6,28•R/t). Во всех случаях итог получится в метрах в секунду. Для перевода в километры в час помножьте его на 3,6.
2. Скорость равноускоренного движенияИзмерьте убыстрение тела с поддержкой акселерометра либо динамометра, если знаменита масса тела. Секундомером замерьте время движения тела и его исходную скорость, если тело не начинает двигаться из состояния покоя. Если же тело двигается из состояния покоя, она равна нулю. Позже этого узнайте скорость тела, прибавив к исходной скорости произведение убыстрения на время (v=v0+at).
3. Скорость вольно падающего телаС поддержкой дальномера измерьте высоту, с которой падает тело в метрах. Дабы узнать скорость, с которой оно долетит до поверхности Земли (без контроля сопротивления воздуха), умножьте высоту на 2 и на число 9,81 (убыстрение свободного падения). Из итога извлеките квадратный корень. Дабы обнаружить скорость тела на всякий высоте, применяйте ту же методологию, только от исходной высоты, отнимайте нынешнюю и полученное значение подставляйте взамен высоты.
Видео по теме
Человек привык воспринимать представление «скорость » как что-то больше примитивное, чем это есть на самом деле. Подлинно, проносящийся на перекрестке автомобиль движется с определенной скорость ю, в то время как человек стоит и отслеживает за ним. Но если человек находится в движении, то умнее говорить не об безусловной скорости, а об относительной ее величине. Обнаружить относительную скорость дюже легко.

Инструкция
1. Дозволено продолжить рассмотрение темы движущегося на перекрестка на автомобиле. Человек же, стоя на красном свете светофора, стоит и глядит на проезжающий автомобиль. Человек статичен, следственно примем его за систему отсчета. Система отсчета — такая система, касательно которой движется какое-нибудь тело либо другая физическая точка.
2. Возможен, автомобиль движется со скорость ю 50 км/ч. Но, возможен, что человек побежал следом автомобилю (дозволено, скажем, взамен автомобиля представить маршрутку либо проезжающий мимо автобус). Скорость бега человека 12 км/ч. Таким образом, скорость данного механического транспортного средства представится человеку не столь и стремительной, как было прежде, когда он стоял! В этом каждая и суть относительной скорости. Относительная скорость неизменно измеряется касательно подвижной системы отсчета. Таким образом, скорость автомобиля не будет для пешехода 50 км/ч, а 50 — 12 = 38 км/ч.
3. Дозволено разглядеть еще один живой пример. Довольно припомнить всякий из моментов, когда человек, сидя у окна автобуса, отслеживает за проносящимися мимо автомобилями. Подлинно, из окна автобуса их скорость кажется примитивно потрясающей. И это не изумительно, чай, если принять автобус за систему отсчета, то скорость автомобиля и скорость автобуса надобно будет сложить. Возможен, что автобус движется со скорость ю 50 км/ч, а машины 60 км/ч. Тогда 50 + 60 = 110 км/ч. Именно с такой скорость ю эти самые автомобили проносятся мимо автобуса и пассажиров в нем.Эта же скорость будет объективна и действительна и в том случае, если за систему отсчета принять всякий из проезжающих мимо автобусов автомобилей.
Кинематика постигает разные виды движения тела с заданной скоростью, направлением и траекторией. Дабы определить его расположение касательно точки начала пути, надобно обнаружить перемещение тела .

Инструкция
1. Движение тела происходит по некоторой траектории. В случае откровенного движения ею является прямая линия, следственно обнаружить перемещение тела достаточно примитивно: оно равно пройденному пути. В отвратном случае определить его дозволено по координатам исходного и финального расположения в пространстве.
2. Величина перемещения физической точки является векторной, от того что она имеет направление. Следственно, дабы обнаружить ее числовое значение, нужно вычислить модуль вектора, соединяющего точки начала пути и его окончания.
3. Разглядим двухмерное координатное пространство. Пускай тело проделало путь от точки A (x0, y0) до точки B (x, y). Тогда, дабы обнаружить длину вектора АВ, опустите проекции его концов на оси абсцисс и ординат. Геометрически проекции касательно той и иной координатной оси дозволено представить в виде катетов прямоугольного треугольника с длинами:Sx = x – x0;Sy = y – y0, где Sx и Sy – проекции вектора на соответствующих осях.
4. Модуль вектора, т.е. длина перемещения тела , в свою очередь, является гипотенузой этого треугольника, длину которой легко определить по теореме Пифагора. Он равен квадратному корню из суммы квадратов проекций:S = ?(Sx? + Sy?).
5. В трехмерном пространстве:S = ?(Sx? + Sy? + Sz?), где Sz = z – z0.
6. Это формула является всеобщей для всякий разновидности движения. Вектор перемещения владеет несколькими свойствами: • его модуль не может превышать длину пройденного пути;• проекция перемещения может быть как позитивной, так и негативной величиной, в то время как величина пути неизменно огромнее нуля;• в всеобщем случае перемещение не совпадает с траекторией движения тела , а его модуль не равен пути.
7. В частном случае откровенного движения тело перемещается только по одной оси, скажем, оси абсцисс. Тогда длина перемещения равна разности финальной и исходной первой координаты точек:S = x – x0.
От модуля исходной скорости во многом зависят колляции движения тела. Для того дабы обнаружить эту величину, нужно воспользоваться дополнительными измерениями либо данными. Величина модуля исходной скорости может являться основополагающей колляцией, скажем, для огнестрельного оружия.

Вам понадобится
- — рулетка;
- — дальномер;
- — секундомер;
- — акселерометр;
- — спидометр;
- — угломер;
- — хронограф.
Инструкция
1. Вначале определитесь с типом движения. Если оно равномерное, то довольно измерить длину пути, по которому переместилось тело, сделав это рулеткой, дальномером либо иным доступным методом, и поделить это значение на время, за которое это перемещение осуществлялось. От того что движение равномерное, то модуль скорости на протяжении каждого пути будет идентичен, так что полученная скорость будет равна исходной.
2. При равноускоренном откровенном движении измерьте при помощи акселерометра убыстрение тела, а с подмогой секундомера время его движения, спидометром финальную скорость в конце отрезка пути. Обнаружьте значение модуля исходной скорости, отняв от финальной скорости произведение убыстрения на время движения v0=v-a*t. Если незнакомо значение убыстрения, измеряйте расстояние, которое покрыло тело за время t. Сделайте это при помощи рулетки либо дальномера.
3. Зафиксируйте значение финальной скорости. Обнаружьте исходную скорость, отняв от удвоенного значения расстояния S, поделенного на время, значение финальной скорости v, v0=2S/t-v. Когда значение финальной скорости измерить трудно, а убыстрение знаменито, воспользуйтесь иной формулой. Для этого измеряйте перемещение тела, а также время, которое оно было в пути. От значения перемещения отнимите произведение убыстрения на квадрат времени, поделенное на 2, а итог поделите на время, v0=(S-at?/2)/t либо v0=S/t-at/2.
4. Когда тело начинает движение под углом к горизонту, на него воздействует сила тяжести. Для того дабы обнаружить модуль исходной скорости, при помощи угломера замеряйте угол к горизонту, под которым тело начинает двигаться. При помощи рулетки либо дальномера замеряйте расстояние, на котором тело упадет на поверхность земли. Дабы определить модуль исходной скорости, расстояние S поделите на синус удвоенного угла ?. Из полученного итога извлеките квадратный корень, v0=?(S/sin(2?)).
5. Дабы измерить модуль исходной скорости пули, выпущенной из стрелкового оружия, используйте хронограф. Для этого установите его так, как указано в его инструкции, от того что хронографы бывают различных типов. Позже этого сделайте выстрел из оружия, на табло хронографа появится итог. Выстрелите еще несколько раз и возьмите среднее значение показаний хронографа. Это и будет модуль исходной скорости пули, выпущенного из данного типа стрелкового оружия.
jprosto.ru
6. Модуль и направление углового перемещения
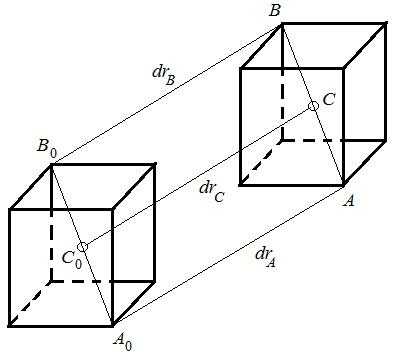
Движение тела по криволинейной траектории можно приближенно представить как движение по дугам некоторых окружностей см. рис.1.
Пусть произвольная точка М сначала
находилась в неподвижной плоскости Q(рис. 2). Затем переместилась в подвижной
плоскостиPна угол
поворота .
.
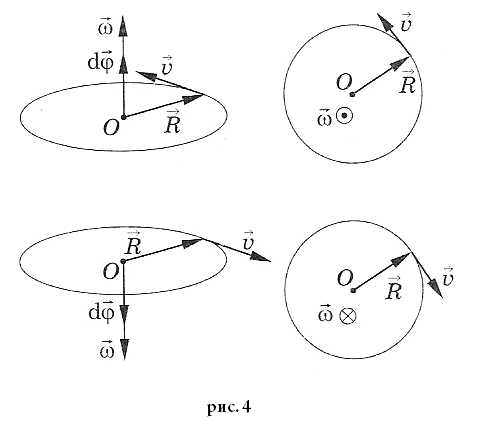
Угол поворота (угловое перемещение) будим отсчитывать от неподвижной плоскости Qпо часовой стрелке (см. рис. 3).
Направление углового
перемещения  совпадает с направлением поступательного
движения острия винта, головка которого
вращается в направлении движения точки
по окружности, т.е. подчиняется правилу
правого винта.
совпадает с направлением поступательного
движения острия винта, головка которого
вращается в направлении движения точки
по окружности, т.е. подчиняется правилу
правого винта.
Модуль углового перемещениязапишется по аналогии с координатой:
7. Модуль и направление угловой скорости
При малом угловом перемещении  равен (1)
равен (1)
 (2)
(2)
Разделим обе части последнего выражения
на  :
:
 или(3)
или(3)
 (4)
(4)
где выражение
 – есть средняя угловая скорость,т.е
– есть средняя угловая скорость,т.е
 ,(5)
,(5)

Вектор угловой
скорости направлен вдоль
оси вращения по правилу
правого винта,
т.е. также как и вектор 
Модуль угловой скорости запишется по аналогии с линейной скоростью:
8. Мгновенная угловая скорость.
Мгновенная угловая скорость равна первой производной углового перемещения по времени:
 (6)
(6)
При равномерном вращении , тогда
 (7)
(7)
9. Связь линейной и угловой скоростей.
Если продолжить (3), то получим:
 или
или
(8)
 (9)
(9)
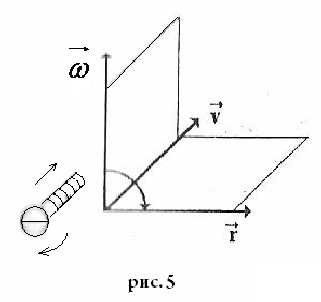
Вектор линейной
скорости совпадает по
направлению
с векторным произведением  .
Векторное произведение всегда связано
справилом
правого винта:
вращая головку винта по направлению
вектора
.
Векторное произведение всегда связано
справилом
правого винта:
вращая головку винта по направлению
вектора  ,
стоящего на первом месте в (9), к вектору
,
стоящего на первом месте в (9), к вектору ,
стоящему на втором месте, определяем
по поступательному движению винта
направление третьего вектора
,
стоящему на втором месте, определяем
по поступательному движению винта
направление третьего вектора ,
см. рис. 5.
,
см. рис. 5.
Модуль векторного произведения:
(10)
10. Модуль и направление углового ускорения.
При
вращении за время  угловая скорость получит приращение
угловая скорость получит приращение ,
тогда (8) примет вид:
,
тогда (8) примет вид:
 (11)
(11)
Разделим обе части
на  ,
получим:
,
получим:
 ,
(12)
,
(12)
где отношение  – есть среднее угловое ускорение.
– есть среднее угловое ускорение.
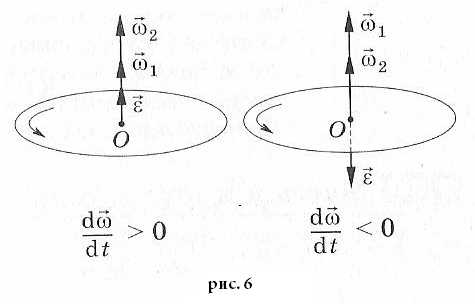 т.е.
т.е.  (13)
(13)
Вектор
углового ускорения  сонаправлен с вектором угловой скости
при
сонаправлен с вектором угловой скости
при и противоположен ему при
и противоположен ему при ,
см. рис 6.
,
см. рис 6.
studfiles.net
Как определяется модуль и направление скорость точки при координатном способе задания движения?
Какие способы задания движения точки применяются в кинематике и в чем они состоят? Как определить траекторию при координатном способе задания точки?
Движение точки в пространстве определяется тремя основными способами: векторным, координатным и естественным.
Векторный: выберем некоторый неподвижный центр О и проведём из центра в точку М, движение которой изучаем, радиус-вектор r. При движении точки М радиус-вектор изменяется по величине и направлению. Каждому моменту времени t соответствует определённое значение r. Следовательно, радиус-вектор однозначно определяет положение точки М. таким образом, чтобы определить движение точки, нужно задать её радиус-вектор в виде однозначной и непрерывной функции времени r: r=r(t).
Координатный: Если координаты точки заданы как однозначные функции времени: x=x(t), y=y(t), z=z(t), то положение точки М в пространстве известно в каждый момент времени. Эти уравнения определяют закон движение точки и называются уравнениями её движения.
Естественный: этот способ задания движения применяется в том случае, когда траектория точки, относительно выбранной системы отсчёта, известна. При движении точки М криволинейная координата s будет изменяться с течением времени, то есть: s=s(t). Зная это уравнение, можно определить положение точки в каждый момент времени. Его называют уравнением движение или законом движения вдоль заданной траектории.
Зададим положение точки в пространстве координатным особом: x=x(t), y=y(t), z=z(t) (*). Чтобы определить положение точки в начальный момент времени (t=0) необходимо в уравнения (*) подставить t=0. Теперь, для определения траектории точки: s=s(t) воспользуемся формулой длины дуги кривой: или, с учётом того, что дифференцирование производиться по времени, можно переписать так: . Знак «+» берётся в том случае, когда точка движется в сторону с положительного отсчёта криволинейной координаты s.
Какая зависимость существует между радиус-вектором движущейся точки и вектором скорости этой точки? Как направлен вектор скорости криволинейного движения точки по отношению к её траектории?
Разложим радиус вектор по ортам декартовой системы координат: . Теперь продифференцируем равенство по времени. В результате получим разложение скорости по ортам : , разложение можно представить так: , где , , – проекции вектора скорости на оси координат. Таким образом, проекции скорости на неподвижные декартовы оси координат равны первым производным по времени соответствующих координат движущейся точки.
При векторном: Для того, чтобы точно вычислить скорость точки в данный момент времени, необходимо перейти в формуле перейти к пределу при стремлении промежутка времени к нулю, то есть: . Этот предел представляет собой первую векторную производную по времени от радиус-вектора точки по времени . Как следует из этих формул, вектор скорости направлен по касательной к траектории точки в сторону её движения.
При координатном: Найдём модуль скорости, зная её проекции: . Для определения направления вектора скорости воспользуемся направляющими косинусами:
, , . В итоге мы всё же прижжем к выводу, что вектор скорости направлен по касательной к траектории.
При естественном: , известно, что . Вектор есть единичный вектор касательной к траектории (её орт), направленный в сторону возрастания криволинейной координаты s. Обозначая орт касательной запишем начальную формулу так: , домножим левую и правую часть уравнения на единичный вектор : . Перепишет выражение так: . Таким образом, видно, что вектор скорости направлено по касательной к траектории точки.
Как определяется модуль и направление скорость точки при координатном способе задания движения?
, , Таким образом, проекции скорости на неподвижные декартовы оси координат равны первым производным по времени от соответствующих координат движущейся точки. Из равенств следует, что проекции скорости точки на координатные оси равны скорости проекций этой точки на те же оси. Зная проекции вектора скорости точки, найдём его модуль: .
Для определения направления вектора скорости воспользуемся направляющими косинусами:
, , .
Какая зависимость существует между радиус-вектором движущейся точки и вектором ускорения точки? Как направлен вектор ускорения криволинейного движения точки по отношению к её траектории, в какой плоскости он лежит?
 , при стремлении к нулю получаем следующий предел: , этот предел называют ускорение точки в данный момент времени. Так как вектор скорости есть первая производная радиус-вектора точки по времени, то: . Таким образом, ускорение точки в данный момент времени, есть векторная величина, равная первой производной от вектора скорости или второй производной от радиус-вектора по времени.
, при стремлении к нулю получаем следующий предел: , этот предел называют ускорение точки в данный момент времени. Так как вектор скорости есть первая производная радиус-вектора точки по времени, то: . Таким образом, ускорение точки в данный момент времени, есть векторная величина, равная первой производной от вектора скорости или второй производной от радиус-вектора по времени.
Установим теперь положение вектора относительно траектории. Отметим, что плоскость треугольника МАВ, образованного векторами , и , при будет поворачиваться вокруг вектора , т.е. вокруг касательной к траектории в точке М, и займёт в пределе определённое предельной положение. Это предельное положение плоскости МАВ называется соприкасающейся плоскостью в точке М траектории. Вектор среднего ускорения направлен так же, как и , т.е. в сторону вогнутости кривой, и всё время находиться в плоскости треугольника МАВ. Предел вектора при есть вектор , который расположен в предельном положении треугольника МАВ, т.е. в соприкасающейся плоскости траектории точки М. Итак, вектор полного ускорения точки находиться в соприкасающейся плоскости траектории точки М направлен в сторону вогнутости траектории.
megaobuchalka.ru
Вопросы к экзамену
Вопросы к экзамену (зачету).
Кинематика поступательного движения МТ. Векторный способ описания движения. Радиус-вектора. Путь и перемещение. Скорость и ускорение.
Кинематика изучает движение тел, не рассматривая причины, которые обуславливают это движение, т. е. в ней дается только математическое описание механического движения тел безотносительно к причинам, вызывающих конкретный вид движения.
Кинематика изучает механическое движение тела без рассмотрения причин вызывающих и изменяющих это движение.
Тело отсчета – это тело по отношению к которому определяется положение других тел.
Системой отсчета называется система координат, снабженная часами и жестко связанная с телом отсчета, по отношению к которому определяется положение других тел в различные моменты времени.
Векторный способ описания движения основывается на задании радиус-вектора материальной точки (м.т.).
Радиус-вектор – это вектор, соединяющий начало координат с положением материальной точки в данный момент времени.
Приращение радиус-вектора называется вектором перемещения м.т.
Перемещение – это вектор, соединяющий начальное и конечное положение материальной точки:
– пройденный путь.
Вектор перемещения направлен вдоль хорды, стягивающей соответствующий участок траектории в случае криволинейного движения.
Скорость.
Скорость определяет быстроту, и направление движения материальной точки в данный момент времени.
Скорость – ВФВ, характеризующая процесс изменения пространственного положения движущейся материальной точки равная перемещению, совершаемому точкой за единицу времени.
Различают:
1) среднюю скорость;
2) мгновенную скорость;
3) среднюю путевую скорость.
Средняя скорость.
Средняя скорость – ВФВ, характеризующая быстроту движения на данном участке и равная отношению приращения радиус-вектора к рассматриваемому промежутку времени Dt:
Вектор средней скорости всегда совпадает по направлению с вектором перемещения:
Размерность скорости [u] = 1 м/с
При неограниченном уменьшении промежутка времени Δt средняя скорость стремиться к предельному значению, которое называется мгновенной скоростью.
Мгновенная скорость u – ВФВ, характеризующая быстроту движения в данный момент времени и равная пределу отношения приращения радиус-вектора к бесконечно малому промежутку времени Δt, в течение которого это приращение произошло:
Вектор мгновенной скорости u разложим на три составляющие по координатным осям:
Проекции вектора скорости:
Модуль вектора скорости :
Направление вектора совпадает с направлением вектора элементарного перемещения точки , т. е. он направлен всегда по касательной к траектории.
По мере уменьшения Δt путь Δl все больше будет приближаться к , поэтому модуль мгновенной скорости равен первой производной пути по времени:
Средняя путевая скорость – СФВ, характеризующая среднюю быстроту изменения со временем пути и равная отношению пройденного пути Δl ко времени Δt, за которое этот путь был пройден:
где l – путь, пройденный точкой за время t.
Для криволинейного движения: , т.к.
Для прямолинейного движения: ,т.к. .
Ускорение.
Быстроту изменения скорости с течением времени характеризует величина называемая ускорением.
Ускорение – ВФВ, характеризующая процесс изменения скорости с течением времени и равная приращению скорости за единицу времени.
Различают среднее и мгновенное ускорения.
Среднее ускорение.
Среднее ускорение – ВФВ, характеризующая среднюю быстроту изменения скорости м.т. на всем пути и равная отношению приращения скорости к промежутку времени, в течение которого это произошло.
Ускорение имеет размерность [a] = 1 м/с2
Мгновенное ускорение – ВФВ, характеризующая быстроту изменения скорости в данный момент времени и равная пределу отношения приращения скорости к бесконечно малому промежутку времени, в течение которого это приращение произошло:
Таким образом, ускорение равно первой производной скорости по времени t, или второй производной радиус-вектора по времени t.
Вектор мгновенного ускорения разложим на три составляющие по координатным осям x, y, z:
Проекция вектора ускорения на координатные оси:
Модуль вектора ускорения :
Вывод: определение скорости и ускорения сводится к чисто математической задаче вычисления первой и второй производных по времени радиуса вектора этой точки.
Кинематика поступательного движения твердого тела МТ.
Поступательное движение является простейшим видом механического движения твердого тела, при котором прямая, соединяющая любые две точки этого тела, перемещаясь вместе с телом, остается параллельной своему первоначальному направлению.
Где – радиусы-векторы точек А, В, С и произвольной точки М тела.
Следовательно,
Вывод: из этих соотношений следует, что для кинематического описания поступательного движения твердого тела и МТ достаточно рассмотреть движение какой либо одной его точки.
Координатный и естественный способы описания движения. Проекция. Тангенциальное и нормальное ускорение.
Координатный способ.
Координатный способ задает положение тела в пространстве с помощью координат тела.
Переход от векторного описания движения к координатному осуществляется путем проектирования.
Проекции радиус-вектора на координатные оси равны соответствующим координатам м.т.:
rx = x; ry = y; rz = z.
Обратный переход осуществляется с помощью теоремы Пифагора и направляющих косинусов:
Направляющие косинусы:
Числом степеней свободы называется число независимых координат, полностью определяющих положение точки (тела) в пространстве относительно выбранной системы отсчета.
Законом движения материальной точки называется уравнение, выражающее зависимость ее радиуса-вектора от времени:
Спроектировав данное уравнение на оси координат, тогда зададим движение тела в прямоугольной (декартовой) системе координат:
Данные уравнения кинематическими уравнениями движения материальной точки.
Траекторией называется линия, которую описывает материальная точка при своем движении относительно выбранной системы отсчет.
Естественный способ описания движения.
В основу естественного способа описания движения положено уравнение траектории или пути, проходимого телом.
Естественный способ описания движения позволяет «привязать» описание движения к его траектории. В основе этого способа лежит естественная тройка векторов – вектор тангенциали , вектор нормали и вектор бинормали .
Вектор тангенциали – это вектор, касательный к траектории в данной точке.
Вектор нормали – это вектор, направленный из данной точки к центру кривизны траектории.
Вектор бинормали – это вектор, являющиеся векторным произведением тангенциали и вектора нормали .
Векторы , , образуют правовинтовую систему. Она также является правой прямоугольной (декартовой) системой координат.
Если , то векторы станут ортами соответствующих осях.
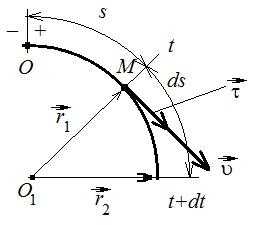
Скорость точки при естественном способе описания движения.
Движение точки задано естественным способом, т. е. известна траектория точки и закон ее движения по этой траектории . Вычислим скорость этой точки.
Воспользуемся определением скорости:
Правую часть до множим и разделим на ds. Получим:
Где – модуль скорости движущейся точки.
-единичный вектор тангенциали, направлен по касательной к траектории в
данной точке. Запишем:
Ускорение точки при естественном способе описания движения.
Траектория точки – плоская кривая, то ускорение точки лежит в данной плоскости.
Вектор полного ускорения удобно разложить на две составляющие вдоль этих направлений:
У плоскости имеются два направления – касательное к траектории (вектор тангенциали ) и главной нормали (вектор нормали ).
-называется тангенциальным ускорением;
-называется нормальным ускорением (центростремительным ускорением) ;
-называется вектором полного ускорения.
Ввиду малости этого участка траектории его можно считать совпадающим с соответствующим участком соприкасающейся окружности радиусом R с центром в точке О, которому соответствует центральный угол:
При перемещении по траектории на малое расстояние ds единичный вектор касательной поворачивается на угол dα.
Ввиду малости dα следует:
По направлением вектор совпадает с единичным вектором главной нормали .
Таким образом,
Для полного ускорения уравнение можно записать в виде:
Для нахождения тангенциального и нормального ускорения воспользуемся формулой для скорости при естественном способе описании движения точки:
Следовательно,
Где -приращение орта касательной к траектории, соответствующее элементарному пути проходимому точкой.
Модуль полного ускорения точки рассчитывается по формуле:
При криволинейном движении точки вектора его полного ускорения всегда отклонен от касательной траектории в сторону ее вогнутости.
Движение точки можно классифицировать в зависимости от тангенциальной и нормальной составляющих ускорения следующим образом:
И – движение прямолинейное равномерное;
И – движение прямолинейное равнопеременное;
И – движение прямолинейное с переменным ускорением;
И – движение по окружности с постоянной скорости;
И – движение равномерное криволинейное;
И – движение равнопеременное криволинейное;
И – движение криволинейное с переменным ускорением.
3.Кинематика вращательного движения МТ. Угловые характеристики движения. Связь между линейными и угловыми величинами.
Кинематика вращательного движения твердого тела и МТ .
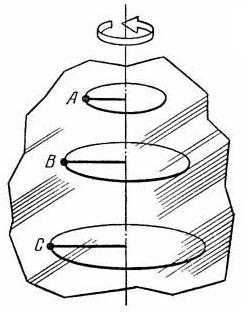
А)Вращательным движением твердого тела называется движение, при котором все его точки движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения.
Ось вращения может проходить как через вращающееся тело, так и находиться вне этого тела.
Вращающееся тело имеет одну степень свободы вокруг неподвижной оси.
Положение тела в пространстве определяется значением угла поворота вокруг оси вращения.
Б) Угловое перемещение.
Рассмотрим вращение м.т. по окружности радиуса R.
Пусть в начальный момент времени t0 м.т. находится в положении M и ее скорость равна u0.
Спустя промежуток времени dt = t1 – t0 м.т. пройдет по окружности путь l и окажется в положении M1.
Радиус-вектор точки, проведенный из центра O окружности, повернется на угол j.
Угол j называется угловым путем (углом поворота).
Размерность углового пути [j] = 1 рад.
Из геометрии известно, что длина дуги, на которую опирается центральный угол MOM1, равна: l = jR
Положение тела в пространстве полностью определяется значением угла поворота вокруг оси вращения из некоторого, условно выбранного начального положения этого тела.
Для описания вращательного движения тела неудобно пользоваться понятиями кинематики, как: перемещение; пройденный путь; скорость и ускорение.
В случае вращательного движения мерой перемещения всего тела за малый промежуток времени dt служит вектор элементарного угла поворота тела .
По модулю вектор элементарного угла поворота равен углу dφ поворота тела вокруг его оси вращения за время dt и направлен вдоль этой оси по правилу правого винта (правилу буравчика).
В) Правило правого винта (правило буравчика):
Если вращательное движение буравчика с правой нарезкой совпадает с направлением вращения, то поступательное движение острия буравчика укажет направление вектора элементарного угла поворота (вектора углового перемещения).
Направление вращения м.т. по окружности задается с помощью вектора углового перемещения .
Модуль вектора углового перемещения равен угловому пути j м.т. , а направление вектора углового перемещения подчиняется правилу буравчика.
Угловой путь j и модуль вектора углового перемещения измеряются в радианах.
При вращательном движении наряду с линейными величинами вводят угловые величины.
К ним относят: угловой путь j, угловое перемещение , угловую скорость , угловое ускорение и др.
Большинство из векторных угловых величин относятся к классу аксиальных (axe (лат.) – ось) векторов.
Аксиальные векторы (псевдовекторы) – это векторы, характеризующие вращение.
В отличие от полярных векторов аксиальные вектора всегда направлены вдоль оси вращения и не имеют конкретной точки приложения. При переходе от правой системы координат к левой псевдовектора изменяют свое направление на противоположное.
Полярные вектора при переходе от правой системы координат к левой всегда сохраняют свое направление неизменным.
Векторное произведение двух полярных векторов дают псевдовектор.
Аксиальные векторы могут быть отложены от любой точки на оси вращения.
Угловая скорость.
Угловая скорость – ВФВ, характеризующая быстроту поворота и равная пределу отношения приращения вектора углового перемещения к бесконечно малому промежутку времени, в течение которого это приращение произошло:
Размерность угловой скорости [w] = 1 рад/с
Угловая скорость является псевдовектором (аксиальным вектором) как и угловое перемещение.
Угловая скорость направлена вдоль оси вращения и ее направление всегда совпадает с направлением вектора углового перемещения
Направление вектора угловой скорости определяется правилом правого винта (правилом буравчика).
Вращение тела вокруг неподвижной оси называется равномерным, если модуль угловой скорости постоянен:
В случае равномерного вращения угол поворота тела прямо пропорционален времени его вращения t:
При равномерном вращении угловая скорость ω показывает, на какой угол поворачивается тело за единицу времени.
Для характеристики равномерного вращения вводятся две величины – период T обращения и частота n обращения.
Период T обращения – это время за которое тело делает один полный оборот.
Размерность периода обращения [T ] = 1 с
Найдем связь периода T обращения с угловой скоростью.
Величина равная обратной величиной периода вращения (обращения) называется частотой вращения или числом оборотом в единицу времени.
Частота n обращения – это число оборотов совершаемое телом за единицу времени, равномерно вращающегося с угловой скоростью .
Размерность частоты обращения [n] = 1 с-1
Частота n обращения обратно периоду T обращения:
Угловая скорость связана с частотой обращения по формуле:
Угловое ускорение.
Угловое ускорение – ВФВ, характеризующая быстроту изменения вектора угловой скорости и равная пределу отношения приращения вектора угловой скорости к бесконечно малому промежутку времени , в течение которого произошло приращение скорости:
Угловое ускорение является псевдовектором (аксиальным вектором) как угловая скорость и угловое перемещение.
Размерность углового ускорения [e ] = 1 рад/с2.
Вектор углового ускорения может принимать всего два направления:
Если (ускоренное вращение), то
Если (замедленное вращение), то
Связь между линейными и угловыми величинами.
Найдем скорость υ произвольной точки N тела.
Радиус-вектор точки N равен:
Перемещаясь по дуге окружности точка N проходит путь:
Модуль скорости точки N:
Учитывая, векторы R и ω взаимно перпендикулярны и вектор скорости υ точки N направлен перпендикулярно обоим этим векторам, можем написать:
Так как векторы и коллинеарные, тогда формулу можно переписать в виде:
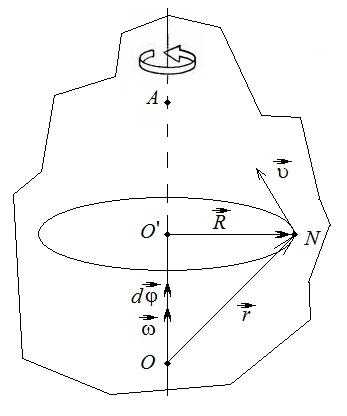
В отличие от угловой скорости тела ω скорость υ часто называют линейной скоростью точки N тела. Вектор υ направлен по правилу правого винта.
Найдем ускорение точки N тела вращающегося вокруг неподвижной оси.
Или
Первый член в правой части этой формулы представляет собой касательное (тангенциальное) ускорение аτ точки N:
второй – нормальное ускорение аn точки N:
Минус в последней формуле стоит потому, что векторы аn и R имеют противоположные направления.
В более общем виде эти выражения можно записать в векторном виде:
здесь – радиус-вектор м.т., проведенный из центра окружности. Его модуль равен радиусу вращения:
Выразим полное ускорение точки через угловые величины.
4.Прямолинейное равномерное движение. Прямолинейное равнопеременное движение.
Прямолинейное движение – это механическое движение, при котором вектор перемещение не меняется по направлению и по величине длине пути пройденного телом.
Равномерным движением называется движение, при котором за любые равные промежутки времени точка проходит одинаковые расстояния, при этом ее вектор скорости не изменяется по величине и он не меняет своего направления.
Скорость постоянная, т. е.
studfiles.net
Модуль – вектор – скорость
Модуль – вектор – скорость
Cтраница 1
Модули вектора скорости на рисунке приведены в логарифмическом масштабе. В ранние моменты времени в слое мягкого грунта отчетливо выделяется область, в которой движение вызвано воздействием воздушной ударной волны, и область, расположенная вблизи эпицентрального источника, в которой преобладает его воздействие. Движение грунта в первой области направлено почти вертикально вниз, а во второй области – преимущественно в радиальном направлении. В скальном грунте распространяется преломленная волна, движение в которой существенно отличается от радиального. Дальнейшее изменение волновой картины в слое мягкого грунта и в скальном основании определяется процессами формирования и распространения различных типов волн. На границе раздела мягкий грунт-скала формируется характерное вихревое движение грунтовой среды. [2]
Модули векторов скорости vx ( в точке AJ и v2 ( в точке Л2) равны ( ух v2 v), но направления векторов различны. [3]
Модуль вектора скорости кривой, записанной в натуральном параметре, постоянен и равен единице. [4]
Нсли модуль вектора скорости точки изменяется с течением времени, то такое движение точки называется неравномерным. [5]
Следовательно, модуль вектора скорости обратно пропорционален расстоянию точки от начала координат. [6]
Закону Максвелла подчиняется модуль вектора скорости молекулы газа. [7]
Если при криволинейном движении точки модуль вектора скорости этой точки возрастает, то движение называется ускоренным, а если г – замедленным. [8]
Итак, мы убедились, что модуль вектора скорости может быть найден по графику закона движения. Отношение AS / A / определяет угол наклона а касательной на этом графике. [9]
Эта проекция равна dv – приращению модуля вектора скорости. [10]
Таким образом, несмотря на постоянство модуля вектора скорости VA точки А, вектор ускорения WA этой точки не обращается в нуль. Это объясняется тем, что движение точки А происходит по криволинейной траектории и вектор скорости VA все время изменяет свое направление. [11]
Здесь р – плотность, V – модуль вектора скорости V, – угол V с осью х и а – угол Маха: since 1 / М, М V / a и а – скорость звука. Первое условие из (1.3) при равенстве определяет Уь Уд Y, а при знаке выполняется, если Уь Уд Y, т-е. [12]
Кинетическая энергия системы материальных точек равна половине квадрата модуля вектора скорости v изображающей точки. [13]
Ух Vy У2, отличается от истинного значения модуля вектора скоростей У / УХ У у У. [14]
Та часть полного ускорения, от которой зависит изменение модуля вектора скорости, называется тангенциальным ускорением. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Направление – вектор – скорость
Направление – вектор – скорость
Cтраница 1
Направление вектора скорости, так же как направление физически малого вектора перемещения, определяется по чертежу траектории. В этом можно наглядно убедиться на простых примерах. [1]
Направление вектора скорости определяется бесконечно малым вектором Дг, который в пределе направлен по касательной к траектории. Сам вектор v в общем случае тоже является функцией от времени. Когда материальная точка Р движется по траектории в реальном пространстве, конец радиуса-вектора v описывает кривую, называемую годографом вектора скорости. [2]
Направление вектора скорости всегда совпадает с направлением вектора перемещения. [4]
Направление вектора скорости v определится касательной к окружности, по которой движется точка, или, что все равно, перпендикуляром к плоскости, проходящей через ось вращения и данную точку, проведенным в сторону вращения тела. [5]
Направление вектора скорости составляет угол 9 с осью г. Удобно рассматривать задачу в безразмерном виде. [6]
Направления векторов скоростей точек А, В и С перпендикулярны к прямым, соединяющим эти точки с мгновенным центром скоростей. [7]
Направления векторов скоростей точек А, В и С перпендикулярны прямым, соединяющим эти точки с мгновенным центром скоростей. [8]
Направления векторов скоростей точек А, В я С перпендикулярны прялшм, соединяющим эти точки с мгновенным центром скоростей. [9]
Направления векторов скоростей точек А, В и С перпендикулярны прямым, соединяющим эти точки с мгновенным центром скоростей. [10]
Направление вектора скорости скольжения и сил трения на профилях зубьев не является постоянным, и по прохождении точки контакта через полюс зацепления они изменяют свой знак на противоположный. [12]
Направление векторов скоростей VKIK VAK и VWK VBK совпадает с общей касательной t – t к профилям Я, и Я2 в точке контакта К. [13]
Направление векторов скоростей VK K – VAK и VKZK – VHK совпадает с общей касательной / – t к профилям Я, и Я2 в точке контакта К. [14]
Страницы: 1 2 3 4
www.ngpedia.ru