
Радиолокация. эффект доплера – fiziku5.ru
Пример 2. Электрический сигнал в 10 Мгц промодулирован музыкой флейты. Он слагается из всевозможных синусоидальных колебаний, частоты которых лежат в интервале от 10 Мгц-7,5 Кгц до 10 Мгц+7,5 Кгц.
Любой сигнал с частотой w, промодулированный по закону, изменяющемуся с частотами W<<w, представляется суперпозицией высокочастотных синусоидальных колебаний, частоты которых лежат в интервале (;). Таким образом, при передаче информации радиостанция излучает множество синусоидальных волн, частоты которых лежат в некотором сравнительно узком интервале.
5. Домашнее задание
5.1 Теоретический материал
Проработать материал занятия по пособию, конспекту и по учебнику “Физика 11” под ред. А. А.Пинского §25 (последние два раздела).
5.2 Решение задач
Задача 1. К двум одинаковым пружинам жесткости k прикреплены два одинаковых груза массы m, которые могут без трения скользить по горизонтальной плоскости. Грузы соединены третьей пружиной жесткости
а) Найдите собственные частоты мод данной системы.
б) Каковы конфигурации нормальных мод системы?
в) Чему равен период биений одного из грузов?
Задача 2. Спектр колебаний грузов из задачи 1 состоит из вкладов двух мод с разными амплитудами. Амплитуда первой моды равна xo, а амплитуда второй – qxo.
а) Чему равна глубина модуляции результирующего колебания?
б) Постройте график зависимости отклонения одного из грузов от времени при q=1/2.
занятие 1.3.5
радиолокация. эффект доплера
1. Обсуждение домашнего задания
1.1 Выступления учащихся по вопросам:
1.1.1 Радиоприем, детекторный приемник;
1.2 Обсуждение решений задач домашнего задания
2. Радиолокация и ее применение
2.1 Определение расстояний с помощью радиолокатора
Радиолокатор используется для определения расстояний до объектов. Это достигается измерением запаздывания короткого радиоимпульса, отраженного от самолета, ракеты, корабля и т. д.
Задача 1. На осциллограф подаются сигналы, излучаемые радиолокатором, и отраженные от самолета. При этом на экране осциллографа наблюдается картина, изображенная на рисунке (расстояние между пичками составляет половину горизонтального раствора электронного луча). Частота горизонтальной развертки осциллографа равна 10 кГц. Чему равно расстояние до самолета?
Чтобы можно было определить еще и местоположение объекта в пространстве, радиоизлучение должно быть направленным. Для этого необходимо по возможности снизить дифракционные эффекты, а, значит, использовать короткие радиоволны и соответствующие антенны. По этой причине диапазон длин волн, излучаемых радиолокационными станциями лежит в пределах от нескольких сантиметров до нескольких дециметров.
Задача 2 [12.2.13]. Чтобы точнее определять направление на наблюдаемый объект, необходимо, чтобы дифракционная расходимость излучения радиолокатора была как можно меньше. Сравните оценки размеров антенн радаров, излучающих трехсантиметровые и тридцатисантиметровые электромагнитные волны внутри угла 0,01 рад. На каких частотах должны работать генераторы радаров?
Генерация радиоволн с частотами 1010 Гц и выше с помощью генераторов такого же типа, что и для радиопередач, встречается с техническими трудностями. По этой причине в радарах используют синхротронное излучение электронов, вращающихся в магнитном поле. Движущийся по круговой орбите электрон, имеет непрерывно изменяющееся ускорение. При движении заряда с ускорением он излучает электромагнитную волну. Если ускорение изменяется синусоидально, то излучается синусоидальная электромагнитная волна с той же частотой, что и частота изменения ускорения.
Задача 3. В бортовом радаре самолета, генерирующем синхротронное излучение, используется постоянный магнит, создающий магнитное поле индукцией
3. Эффект Доплера
С помощью радаров можно определить не только положение объекта, но и скорость его движения. Способ определения скорости опирается на физическое явление, заключающееся в том, что частота синусоидальной волны увеличивается при отражении от движущегося навстречу волне тела и уменьшается при отражении от тела, движущегося в ту же сторону, что и волна (эффект Доплера). Это относится не только к отражению, но и к генерации волн движущимся источником. Кинематику этого явления легко понять с помощью аналогии на примере следующей механической задачи.
Задача 4. Спортсмены бегут колонной со скоростью
Колонна аналогична волне, изменение направления бега спортсменов при встрече с тренером — отражению, расстояние между спортсменами в колонне аналогично длине волны, скорость движения колонны — скорости распространения электромагнитной волны. “Длина волны” уменьшается при “отражении” (а вместе с ней и частота следования спортсменов) из-за того, что между двумя последовательными встречами тренера со спортсменами тренер успевает пробежать некоторое расстояние навстречу, и каждому спортсмену остается пробежать меньшее расстояние, чем
Итог. Частота волны n0, падающей по нормали на движущуюся со скоростью u поверхность, изменяется при отражении на величину .
Задача 5. Астрономические наблюдения за далекими галактиками показали, что частоты n всех линий в спектрах известных элементов уменьшены в одном и том же отношении: Dn/n или
С какой скоростью удаляется от нас галактика, если наблюдаемые линии ее спектров излучения смещены в красную сторону на
Задача 6. При наблюдении спектров раскаленных газов обнаруживается, что излучение атомов, соответствующее какой-либо линии спектра, не является монохроматическим. Интенсивность излучения любой линии имеет колоколообразное распределение. Объясните причины уширения линий. Предложите экспериментальный способ измерения температуры газа из измерений уширения спектральных линий.
3. Домашнее задание
3.1 Решение задач
Задача 1. Любой источник электромагнитной волны излучает не строго монохроматическую волну, а целый спектр, заключенный в некотором интервале Dw. По этой причине доплеровский сдвиг для такого излучения можно зарегистрировать не при любой скорости источника. Полагая, что прибор для измерения скорости автомобиля у инспектора
Задача 2. В приборе для измерения скорости объектов, использующем эффект Доплера, сигналы от генератора электромагнитной волны и от регистратора отраженной волны складываются в усилителе, и наблюдаются результирующие биения. Выведите формулу для частоты биений как функции скорости объекта.
занятие 1.4.1
законы отражения и преломления в оптике
(Повторение геометрической оптики)
2. Предельный случай волновой оптики
2.1 Прямолинейность распространения света
Радиолокация
1. Что такое радиолокация?
Радиолокация – область науки и техники, предмет которой – наблюдение различных объектов (целей) радиотехническими методами: их обнаружение, распознавание, определение их координат и скорости и др.
Еще А.С. Попов заметил, что радиоволны имеют способность отражаться. На этом и основан принцип действия радиолокационной станции. Мощный луч радиолокационного передатчикам фокусируется большой антенной в направлении исследуемого объекта, фиксируется и изучается отраженный радиосигнал, на основе чего делаются выводы о тех или иных характеристиках объекта.
2. Начало радиолокации.
Первые работы по созданию радиолокационных систем начались в нашей стране в середине 30-х годов. Впервые идею радиолокации высказал научный сотрудник Ленинградского электрофизического института (ЛЭФИ) П.К. Ощепков еще в 1932 году. Позднее он же предложил идею импульсного излучения.
16 января 1934 года в Ленинградском физико – техническом институте (ЛФТИ) под председательством академика А. Ф. Иоффе состоялось совещание, на котором представители ПВО РККА поставили задачу обнаружения самолетов на высотах до 10 и дальности до 50 км в любое время суток и в любых погодных условиях. За работу взялись несколько групп изобретателей и ученых. Уже летом 1934 года группа энтузиастов, среди которых были Б. К. Шембель, В.В. Цимбалин и П. К. Ощепков, представила членам правительства опытную установку. Проект получил необходимое финансирование и в 1938 году был испытан макет импульсного радиолокатора, который имел дальность действия до 50 км при высоте цели 1,5 км. Создатели макета Ю, Б, Кобзарев, П, А, Погорелко и Н, Я, Чернецов в 1941 году за разработку радиолокационной техники были удостоены Государственной премии СССР. Дальнейшие разработки были направлены в основном на увеличение дальности действия и повышение точности определения координат. Станция РУС- 2 принятая летом 1940 года на вооружение войск ПВО не имела аналогов в мире по своим техническим характеристикам , она сослужила хорошую службу во время Великой Отечественной войны при обороне Москвы от налетов вражеской авиации. После войны перед радиолокационной техникой новые сферы применения во многих отраслях народного хозяйства. Без радаров теперь немыслимы авиация и судовождение. Радиолокационные станции исследуют планеты Солнечной системы и поверхность нашей Земли, определяют параметры орбит спутников и обнаруживают скопления грозовых облаков. За последние десятилетия радиолокационная техника неузнаваемо изменилась.
3. Основы радиолокации.
Определение координат цели радаром производится с учетом выбранной системы координат. Выбор той или иной системы координат связан со сферой применения радиолокационной установки. Например, наземная радиолокационная станция (РЛС) наблюдения за воздушной обстановкой измеряет три координаты цели: азимут, угол места и наклонную дальность.
Объект
R
РЛС
α
ß
Система координат обзорной РЛС :
α – азимут; ß- угол места; R – наклонная дальность
РЛС такого типа используются на аэродромах . Работает эта станция в сферической системе координат.
Различают два основных режима работы РЛС : режим обзора (сканирования) пространства и режим слежения за целью. В режиме обзора луч РЛС по строго определенной системе просматривает все пространство или заданный сектор. Антенна , например, может медленно поворачиваться по азимуту и в то же время быстро наклоняться вверх и вниз, сканируя по углу места. В режиме слежения антенна все время направлена на выбранную цель и специальные следящие системы поворачивают ее вслед за движущейся целью.
Удаленность того или иного объекта определяется по запаздыванию отраженного сигнала относительно излучаемого. Запаздывание сигнала очень мало, поскольку радиоволны распространяются со скоростью, близкой к скорости света (300 000 км/с). Действительно, для самолета, находящегося на расстоянии 3 км от РЛС, запаздывание сигнала составит всего 20 мкс. Такой результат получается из – за того, что радиоволна проходит путь в обоих направлениях, к цели и обратно, так что общее расстояние, пройденное волной, составит 6 км. Однако при радиолокации Марса, успешно проведенной в начале 60-х годов, задержка сигнала составила около 11 мин, а это время малым назвать нельзя. Современная вычислительная техника способна с высокой точностью обрабатывать сигналы с ничтожным временем запаздывания, поэтому с помощью радаров можно регистрировать объекты, расположенные как на больших, так и на малых расстояниях от наблюдателя. Существует единственное существенное ограничение применения радаров в целях сверхдальних наблюдений – это ослабление сигнала. Если сигнал проходит большое расстояние, то он частично рассеивается, искажается и ослабевает и выделить его в приемнике из собственных шумов приемника и шумов иного происхождения зачастую крайне затруднительно. Ослабление сигнала при радиолокации вполне поддается расчету , который основан на простых физических соображениях. Если в какой – то точке излучается мощность Р , то поток мощности через единичную площадку, находящуюся на расстоянии R , будет пропорционален Р/4R^2. В знаменателе стоит площадь сферы радиусом R, окружающей источник. Таким образом, при обычной радиосвязи мощность, принятая антенной, обратно пропорциональна квадрату расстояния. Этот закон – закон сферической расходимости пучка энергии – выполняется всегда при распространении волн в свободном пространстве. Даже если сконцентрировать излучаемую мощность в узкий луч и поток энергии возрастет в несколько раз ( этот коэффициент называется коэффициентом направленного действия антенны, КНД ), квадратичная зависимость от расстояния сохранится. Но в радиолокации радиосигнал преодолевает двойные расстояния, а сама облучаемая цель рассеивает энергию по
всем направлениям , и если облучающий цель поток энергии ослабевает обратно пропорционально R^2 то приходящий к приемнику рассеяный поток еще ослабляется во столько же раз и оказывается обратно пропорциональным R^4. Это означает, что для повышения дальности действия РЛС в два раза при прочих равных условиях мощность ее передатчика надо повысить в 16 раз. Столь высокой ценой достигаются высокие характеристики современных РЛС.
4. Радиолокационная техника.
Рассмотрим структурные схемы простейших радиолокаторов. Доплеровская РЛС непрерывного излучения – самая простая из всех. Именно по такому принципу были построены первые «радиоуловители» самолетов. Она содержит генератор высокочастотных колебаний ( ГВЧ), передающую Апер и приемную Апр антенны, смеситель и усилитель низкой частоты биений (УНЧ) . На его выходе включаются либо наушники, либо частотомер.
ГВЧ
V мМММ
Апер
УНЧ
Cмеситель
Апр
Доплеровская РЛС не обнаруживает неподвижные предметы. Сигнал, отраженный от них имеет ту же самую частоту, что и излучаемый. Но если обнаруживаемый объект движется в направлении локатора или от него, частота отраженного сигнала изменяется вследствие эффекта Доплера (эффект Доплера – изменение длины волны l (или частоты), наблюдаемое при движении источника волн относительно их приемника. Характерен для любых волн (свет, звук и т. д.). При приближении источника к приемнику l уменьшается, а при удалении растет на величину l – lо = vlо/c, где lо – длина волны источника, c – скорость распространения волны, v – относительная скорость движения источника.)
При радиолокации эффект Доплера проявляется вдвое сильнее. Самолет, летящий навстречу излучаемой локатором волне, встречает более частые колебания электромагнитного поля. Переизлучая их во время движения, он еще повышает их частоту. При удалении же самолета от локатора частота отраженного сигнала понижается. В приемную антенну попадают два сигнала: прямого прохождения (от излучающей антенны) и отраженный от цели. В смесителе они взаимодействуют, образуя разностную частоту биений, в точности равную доплеровской Fд=2foV/C
где fo – частота излучаемого сигнала; С – радиальная скорость цели; V – скорость радиоволн, равная скорости света.
Определить дальность доплеровским локатором нельзя, но если частоту излучаемых колебаний изменять в некоторых пределах, т.е. ввести в генератор частотную модуляцию, то появляется возможность измерить дальность. Первую опытную установку, действующую по такому принципу, построил известный ученый Б. К. Шембель и использовал ее при локации Крымских гор. Пусть частота передатчика изменяется по пилообразному закону. Частота отраженного сигнала будет изменяться также, но с запаздыванием на некоторое время t , время распространения волн до цели и обратно. Если частота передатчика в какой – то момент t 1 равна f 1 , то отраженный сигнал возвращается с этой же частотой. Но частота передатчика к времени t1 + t успеет измениться до значения
f 1 + f, и в приемнике выделится сигнал биений с частотой f.
f1+f
F
t
f1
t1
t1 + t
Излучаемый сигнал
Эта частота тем выше, чем больше расстояние до цели. Частотно – модулированные локаторы нашли свое применение в авиации, на судах, а также для выполнения операции стыковки космических кораблей на орбите, обеспечивающие очень хорошую точность определения дистанции.
Наибольшее распространение получил импульсный способ определения дальности. Работой импульсного локатора управляет генератор импульсов (ГИ), следующих с относительно невысокой частотой повторения – порядка сотен импульсов в секунду. Мощные импульсы подаются на генератор высокой частоты (ГВЧ), вырабатывающий очень мощные короткие импульсы высокочастотных (ВЧ) колебаний. Через антенный переключатель (АП) ВЧ импульс поступает в антенну и излучается. После излучения импульса антенна подключается ко входу приемника (Пр).
Одновременно с излучением импульса запускается генератор развертки (ГР), вырабатывающий линейно нарастающее пилообразное напряжение. Оно поступает на пластины горизонтального отклонения электронно – лучевой трубки, экран которой и является т.н. экраном РЛС.
ГИ
ГВЧ
АП
Пр
ГР
ЭЛТ
Усиленный и продетектированный сигнал с выхода приемника подается на пластины вертикального отклонения. Что же можно наблюдать на экране? Прежде всего в самом начале линии развертки появится мощный импульс сигнала ВЧ генератора, который служит началом шкалы дальности. Спустя некоторое время, нужное для распространения волн, придут сигналы от целей. Луч к этому времени переместится правее. Чем дальше цель, тем дальше от начала развертки окажутся отраженные импульсы. А их амплитуда будет соответствовать интенсивности отраженного сигнала. По ней в какой – то мере можно судить о величине цели. Определять дальность на экране импульсного локатора достаточно просто: под линией развертки можно расположить шкалу. Но, поскольку такой способ уж очень несерьезен, в схему локатора ввели масштабные генераторы меток. Шкалу дальности стал рисовать электронный луч параллельно со своим основным назначением – индикацией целей. Генератор развертки совершенствовался, например достигнута возможность «растянуть» по горизонтали любое место линии развертки, чтобы подробнее рассмотреть отраженные сигналы в заданном интервале дальностей. У описанного индикатора ( он получил название «индикатор типа «А») есть существенный недостаток: он дает только дальность, а направление на цель надо определять по шкалам поворотного устройства антенны. Поэтому очень скоро был разработан другой индикатор (тип В), используемый в РЛС кругового обзора. Антенна этой станции вращается вокруг вертикальной оси, «просматривая» все азимутальные направления от 0 до 360 градусов. Структурная схема РЛС и порядок работы остаются прежними, но индикатор кругового обзора (ИКО) выполнен совсем по – другому. Пилообразное напряжение развертки подается на специальный кольцевой отклоняющий электрод, и линия развертки проходит по радиусу – от центра к краю экрана. Она поворачивается синхронно с антенной. Для поворота линии развертки на обычные отклоняющие пластины X и Y подают синусоидальные переменные напряжения в квадратуре, т.е. на одну пару пластин – косинусоидальное напряжение, а на другую синусоидальное. Частоты этих напряжений равны частоте вращения антенны и составляют доли герца. Луч при этом описывал бы круги на экране, но , поскольку имеется еще напряжение радиальной развертки на кольцевом электроде, изменяющееся значительно быстрее с частотой повторения излучаемых импульсов, луч чертит линию развертки, вращающуюся вместе с вращением антенны.
Сигнал с выхода приемника подается на управляющий электрод (сетку) ЭЛТ и заставляет луч увеличивать яркость при наличии отраженных импульсов. Таким образом, на экране ИКО луч «рисует» радиолокационную карту местности. Место расположения самой РЛС соответствует центру экрана. Локатор кругового обзора хорошо подходит для морской навигации, дальнего обнаружения воздушных целей, диспетчерского контроля в аэропортах. Теперь все чаще переходят к секторному обзору, при котором антенна «осматривает» не весь горизонт, а только нужную его часть. Большие наземные РЛС снабжают индикаторами нескольких типов: кругового обзора для обнаружения целей и контроля обстановки, типа А для точного определения дальности и т.д. Если, например, диаграмма направленности антенны может «качаться» еще и по углу места (для этого обычно не наклоняют всю антенну, достаточно «качать» ее облучатель ), то применяют в дополнение к ИКО индикатор «дальность – высота». В нем луч развертывается по радиусу и «качается» в некотором секторе синхронно с антенной, а координаты выбраны прямоугольными. Такой индикатор наглядно покажет и высоту цели.
5. Конструкции отдельных элементов РЛС .
М
L
+ Ea
C
ВЧ
V1
V2
ощный генератор высокой частоты для локаторов, работающих в диапазоне метровых волн, выполняется на электронных лампах, как правило, триодах. Но колебательный контур, состоящий из катушки и конденсатора, уже не пригоден, поскольку катушка для частот в десятки и сотни мегагерц должна быть маленькой, а это несовместимо с высокой мощностью колебаний. Поэтому катушка вырождается в отрезок двухпроводной линии, выполненной из толстых медных трубок. Линия на
страивается передвижным короткозамкнутым мостиком. Симметричная линия лучше всего совмещается с двухтактным генератором :
Конденсатора в контуре нет – его роль выполняют междуэлектродные емкости ламп. Через них осуществляется и обратная связь. Часть переменного анодного напряжения через емкость анод – катод возбуждает другой контур – линию, включенную между катодами ламп. Ее настройкой подбирают нужную для возбуждения колебаний фазу напряжения обратной связи. Сетки ламп заземляют по высокой частоте. Отбор мощности ВЧ колебаний осуществляют петлей связи, расположенной вблизи анодной линии. Напряжение анодного питания подают на короткозамкнутый мостик этой линии через ВЧ дроссель (катушку индуктивности), изолирующий источник питания от ВЧ колебаний. Генератор будет работать в импульсном режиме, если его питать не постоянным анодным напряжением, а мощными высоковольтными импульсами. Они генерируются в устройстве с тиратроном – газоразрядной лампой, поджигаемой управляющим импульсом. Пока тиратрон погашен, накопительный конденсатор С заряжается через дроссель с большой индуктивностью L от высоковольтного источника. Ток заряда невелик, а время заряда может достичь периода повторения импульсов. Короткий запускающий импульс поджигает тиратрон, и генератор ВЧ оказывается подключенным к накопительному конденсатору, заряженному до высокого потенциала (десятки киловольт). Генерируется очень короткий радиоимпульс, причем анодный ток ВЧ генератора может достичь десятков ампер. Заряд конденсатора расходуется в течение нескольких микросекунд или даже долей микросекунды, генерация прекращается, и тиратрон гаснет. Конденсатор С снова начинает медленно заряжаться через дроссель L. Если бы ВЧ генератор работал при такой мощности несколько дольше, то электроды лампы неминуемо расплавились бы , выгорели или испарились. Только благодаря краткости импульсов ничего этого не происходит, а средняя мощность генератора оказывается для него невысокой и вполне безопасной.
Импульсный модулятор с накопительным конденсатором имеет один существенный недостаток. По мере расходования заряда конденсатора при генерировании радиоимпульса напряжение на нем быстро падает, а с ним – и мощность высокочастотных колебаний. В результате генерируется остроконечный радиоимпульс с пологим спадом. Гораздо выгоднее работать с прямоугольными импульсами, мощность которых в течение их длительности остается примерно постоянной. Прямоугольные импульсы будут генерироваться описанным генератором, если накопительный конденсатор заменить искусственной длинной линией, разомкнутой на свободном конце; например, может использоваться отрезок коаксиального кабеля. Волновое сопротивление линии должно равняться сопротивлению генератора ВЧ колебаний со стороны зажимов питания, т.е. отношению его анодного напряжения к анодному току. В момент поджигания тиратрона вдоль длинной линии пойдет волна напряжения, разряжающая линию. Процесс закончится, когда волна напряжения, отразившись от разомкнутого конца линии, вернется к аноду тиратрона. Линия будет разряжена полностью, и тиратрон погаснет. Таким образом, длительность импульса определяется длинной линии и равна отношению удвоенной длины линии к скорости распространения волн в ней. Генераторы модулирующих импульсов с искусственными длинными линиями получили самое широкое распространение в радиолокационной технике.
Для перехода к дециметровым и сантиметровым волнам ВЧ генератор с двухпроводными линиями оказался непригодным, поскольку длина линии составляет менее четверти длины волны. Кроме того, время пролета электрона в лампе оказывается больше периода колебаний , что полностью нарушает работоспособность триода. Выход был найден в использовании объемного резонатора . Объемный резонатор – ограниченный объем, внутри которого могут возбуждаться электромагнитные колебания. Обычно объемный резонатор – замкнутая полость с проводящими стенками, форма и размеры которой определяют частоту колебаний и конфигурацию электрических и магнитных полей, бывают прямоугольные, цилиндрические, тороидальные и др. форм. Объемным резонатором является также объем, заполненный средой с др. электрическими и магнитными свойствами. Применение объемных резонаторов позволило повысить резонансную частоту ВЧ контура , не уменьшая его размеров.
studfiles.net
Эффект Доплера для упругих и электромагнитных волн
Под эффектом Доплера понимают изменение частоты, регистрируемой приемником волны, связанное с движением источника и приемника. Впервые теоретически этот эффект в акустике и оптике был обоснован австрийским физиком К. Доплером в 1842 г.
Рассмотрим
вывод формулы, определяющей частоту
упругой волны, воспринимаемой приемником,
на примере двух частных случаев. 1.
В среде находятся неподвижные источник
и приемник звуковых волн.
Испускаемые источником волны частоты  и длины волны
и длины волны  ,
двигаясь со скоростью
,
двигаясь со скоростью  ,
достигают приемника и создают в нем
колебания такой же частоты
,
достигают приемника и создают в нем
колебания такой же частоты  (рис. 6.11,а). 2.
Источник и испускаемая им волна движутся
вдоль оси Ох. Приемник движется к ним
навстречу. Отметим, что скорость волны
(рис. 6.11,а). 2.
Источник и испускаемая им волна движутся
вдоль оси Ох. Приемник движется к ним
навстречу. Отметим, что скорость волны  зависит только от свойств среды и не
зависит от движения приемника и источника.
Поэтому движение источника при постоянной
частоте
зависит только от свойств среды и не
зависит от движения приемника и источника.
Поэтому движение источника при постоянной
частоте  излучаемых им колебаний приведет к
изменению только длины волны. Действительно,
источник за период колебаний
излучаемых им колебаний приведет к
изменению только длины волны. Действительно,
источник за период колебаний  пройдет расстояние
пройдет расстояние  ,
а по закону сложения скоростей волна
отойдет от
источника на расстояние
,
и поэтому ее длина волны
будет меньше
,
а по закону сложения скоростей волна
отойдет от
источника на расстояние
,
и поэтому ее длина волны
будет меньше  (рис.6.11,б).
(рис.6.11,б).
По
отношению к приемнику волна в соответствии
с законом сложения скоростей будет
двигаться со скоростью  и для неизменной длины волны
и для неизменной длины волны  частота
частота  колебаний, воспринимаемых источником,
изменится и будет равна
колебаний, воспринимаемых источником,
изменится и будет равна
.
Если
источник и приемник будут удаляться
друг от друга, то тогда в формуле для
частоты  нужно изменить знаки. Следовательно,
единая формула для частоты колебаний,
воспринимаемой приемником, при движении
источника и приемника по одной прямой,
будет выглядеть следующим образом:
нужно изменить знаки. Следовательно,
единая формула для частоты колебаний,
воспринимаемой приемником, при движении
источника и приемника по одной прямой,
будет выглядеть следующим образом:
. (6.36)
Из этой формулы следует, что для наблюдателя, находящегося, например на станции, частота звукового сигнала приближающегося поезда (υПР=0, υИСТ>0)
будет больше, а при удалении от станции меньше. Если, например, взять скорость звука υ=340 м/с, скорость поезда υ=72 км/ч и частоту звукового сигнала ν0=1000 Гц (такая частота хорошо воспринимается человеческим ухом, причем ухо различает звуковые волны с разностью частот, большей 10 Гц), тогда частота сигнала, воспринимаемого ухом будет изменяться в пределах

Рис. 6.11
 =
=
Если
источник и приемник движутся со
скоростями, направленными под углом к
соединяющей их прямой, то тогда для
расчета частоты  ,
воспринимаемой приемником, нужно брать
проекции их скоростей на эту прямую
(рис. 6.11,в):
,
воспринимаемой приемником, нужно брать
проекции их скоростей на эту прямую
(рис. 6.11,в):
. (6.37)
Эффект Доплера наблюдается и для электромагнитных волн. Но в отличие от
упругих волн, ЭМВ могут распространяться в отсутствии среды, в вакууме. Следовательно, для ЭМВ не имеет значения скорость движения источника и приемника относительно среды. Для ЭМВ необходимо рассматривать относительную скорость движения источника и приемника, учитывать при этом преобразования Лоренца и замедление хода времени в движущейся системе отсчета.
Рассмотрим продольный эффект Доплера. Выведем формулу для частоты ЭМВ, фиксируемой приемником, в частном случае – источник и приемник движутся навстречу друг другу в направлении соединяющей их прямой. Пусть имеются две И.С.О. – неподвижная И.С.О. К (в ней находится неподвижный приемник ЭМВ) и движущаяся относительно нее вдоль совпадающих осей координат Ох и Ох′ И.С.О. К′ (в ней находится неподвижный источник ЭМВ) (рис. 6.12,а).
Рис. 6.12
Рассмотрим, что наблюдается в И.С.О. К и К’.
1. И.С.О. К′.
Источник ЭМВ неподвижен и находится в
начале оси координат Ох′
(рис. 6.12,а). Он излучает в И.С.О. К′
ЭМВ с периодом  ,
частоты
и длины волны .
,
частоты
и длины волны .
Приемник
движется, но его движение не влияет на
изменение частоты принимаемого сигнала.
Это связано с тем, что, согласно второму
постулату С.Т.О., скорость ЭМВ относительно
приемника будет всегда равна с, и поэтому частота принимаемой приемником
волны в И.С.О. К’ будет также равна  ,
,
2.
И.С.О. К.
Приемник ЭМВ неподвижен, а источник
ЭМВ движется в направлении оси Ох со скоростью  .
Поэтому для источника необходимо учесть
релятивистский эффект замедления
времени. Это означает, что период волны,
излучаемой источником в этой инерциальной
системе отсчета, будет больше периода
волны в И.С.О.
.
Поэтому для источника необходимо учесть
релятивистский эффект замедления
времени. Это означает, что период волны,
излучаемой источником в этой инерциальной
системе отсчета, будет больше периода
волны в И.С.О.  ().
().
Для
длины волны  ,
излучаемой источником в направлении
приемника, можно записать
,
излучаемой источником в направлении
приемника, можно записать
.
Это
выражение позволяет для периода Т и частоты  воспринимаемой приемником ЭМВ в И.С.О. К, записать следующие формулы:
воспринимаемой приемником ЭМВ в И.С.О. К, записать следующие формулы:
 ,
(6.38)
,
(6.38)
где учтено, что скорость ЭМВ относительно приемника в И.С.О. К равна с.
В случае удаления источника и приемника необходимо в формуле (6.38) изменить знаки. При этом фиксируемая приемником частота излучения будет уменьшаться по сравнению с частотой волны, излучаемой источником, т.е. наблюдается красное смещение спектра видимого света.
Как видно, в выражение (6.38) не входит скорость источника и приемника по отдельности, входит только скорость их относительного движения.
Для ЭМВ также наблюдается поперечный эффект Доплера, который связан с эффектом замедления времени в движущейся инерциальной системе отсчета. Возьмем момент времени, когда скорость источника ЭМВ будет перпендикулярна линии наблюдения (рис. 6.12,б), тогда движение источника к приемнику не происходит и поэтому длина излучаемой им волны не изменяется (). Остается только релятивистский эффект замедления времени
 ,
.
(6.39)
,
.
(6.39)
Для поперечного эффекта Доплера изменение частоты будет существенно меньше, чем для продольного эффекта Доплера. Действительно, отношение частот, найденных по формулам (6.38) и (6.39), для продольного и поперечного эффектов будет значительно меньше единицы: .
Поперечный эффект Доплера был подтвержден экспериментально, что еще раз доказало справедливость специальной теории относительности.
Приведенные
здесь доводы в пользу формулы (6.39) не
претендуют на строгость, но они дают
правильный результат. В общем случае,
для произвольного угла  между линией наблюдения и скоростью
движения источника
между линией наблюдения и скоростью
движения источника  ,
можно записать следующую формулу
,
можно записать следующую формулу
 ,
(6.40) где угол
,
(6.40) где угол  – это угол между линией наблюдения и
скоростью движения источника см. (рис.
6.12, б).
– это угол между линией наблюдения и
скоростью движения источника см. (рис.
6.12, б).
Поперечный эффект Доплера отсутствует для упругих волн в среде. Это связано с тем, что, для определения частоты волны, воспринимаемой приемником, берутся проекции скоростей на прямую, соединяющую источник и приемник см. (рис. 6.11,в), а замедление времени для упругих волн отсутствует.
Эффект Доплера находит широкое практическое применение, например для измерения скоростей движения звезд, галактик по доплеровскому (красному) смещению линий в спектрах их излучения; для определения скоростей движущихся целей в радиолокации и гидролокации; для измерения температуры тел по доплеровскому уширению линий излучения атомов и молекул и т.д.
studfiles.net
Учебные вопросы и распределение времени:
НАЦИОНАЛЬНЫЙ МИНЕРАЛЬНО-СЫРЬЕВОЙ УНИВЕРСИТЕТ «ГОРНЫЙ»
ВОЕННАЯ КАФЕДРА
УТВЕРЖДАЮ
Начальник военной кафедры
полковник
М.Розум
«____»_______________2013 года
Лекция
для проведения факультатива со студентами второго курса
по военно-профессиональной учебной дисциплине
«Основы построения зенитных комплексов»
Тема № 3. Общие сведения о радиолокации
Занятие № 1. Общие сведения о радиолокации
Обсуждена на заседании кафедры
«___» __________ 2013 г., протокол № ___
САНКТ–ПЕТЕРБУРГ
2013 г.
УЧЕБНЫЕ И ВОСПИТАТЕЛЬНЫЕ ЦЕЛИ:1. Изучить понятие радиолокации, виды радиолокационных целей, виды радиолокации.
2. Изучить импульсный метод измерения дальности. Понять сущность эффекта Доплера.
3. Прививать творческий подход к изучению дисциплины.
ВИД ЗАНЯТИЯ: лекция
ВРЕМЯ: 2 часа
МЕСТО: класс
МАТЕРИАЛЬНОЕ ОБЕСПЕЧЕНИЕ: 1. Презентация.
2. Проектор.
3. Компьютер.
ЛИТЕРАТУРА:
1. Рудианов Г.В., Переверзев М.А., Габдулин М.А. Основы построения зенитных комплексов. Справочно-учебный материал. СПб. 2011, с. 3-6.
I. | Вводная часть………………………………………………………………… | 10 мин |
II. | Основная часть………………………………………………………………. | 75 мин |
1. | Основные понятия и определения. Виды радиолокации…………………… | 25 мин |
2. | Импульсный метод измерения дальности…………………………………… | 25 мин |
3. | Эффект Доплера……………………………………………………………… | 25 мин |
III. | Заключительная часть……………………………………………………… | 5 мин |
ВВЕДЕНИЕ
Радиолокация, так же как и другие области прикладной радио – техники: радиосвязь, радиовещание, телевидение и др.,— основана па использовании электромагнитных волн (радиоволн).
Электромагнитные волны — это особый вид материи, представляющий собой совокупность электрических и магнитных переменных полей, движущихся в свободном пространстве со скоростью света (около 300 000 км/сек).
Для получения и излучения электромагнитных волн необходимо радиопередающее устройство — передающая радиостанция. Она состоит из источника электрической энергии, высокочастотного генератора, вырабатывающего переменный ток высокой частоты, устройства, управляющего высокочастотными колебаниями, антенны, предназначенной для излучения радиоволн.
1. Основные понятия и определения. Виды радиолокации
Радиолокация – это наука, изучающая способы определения местоположения объектов с использованием радиоволн.
Радиолокация, применяемая в войсковой ПВО, основана на следующих принципах:
прямолинейность распространения радиоволн. В действительности радиоволны распространяются прямолинейно только в вакууме. В атмосфере радиолуч искривляется, причем, степень и знак искривления зависит от параметров атмосферы. Однако, при дальностях, характерных для войсковой ПВО (десятки километров), искривлением радиолуча можно пренебречь;
постоянство скорости распространения радиоволн. Принято, что радиоволны распространяются со скоростью с=3·108м/с. Однако, с такой скоростью радиоволны распространяются только в вакууме, реальная же скорость радиоволны зависит от параметров атмосферы. Тем не менее, при решении практических задач радиолокации изменением данной скорости можно пренебречь;
отражение радиоволн от объектов.
Для обнаружения и определения местонахождения объектов, например самолетов или кораблей, при отсутствии их видимости служит радиолокационная станция, состоящая из передающего и приемного устройств. Радиоволны, излучаемые передатчиком радиолокационной станции, встречая на своем пути препятствие, например высокое здание, обрывистый холм, самолет, отражаются от него и принимаются приемником этой же станции.
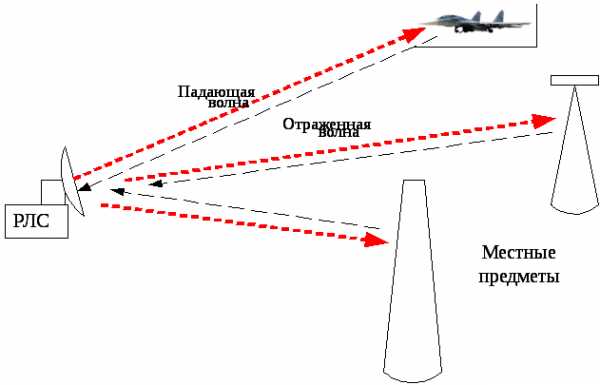
Рис. 1. Отражение радиоволн, излучаемых радиолокационной станцией
Явление отражения радиоволн от препятствий положено в основу работы радиолокационных станций. Это явление подобно эху — всем известному отражению звуковых волн, которое часто наблюдается в лесистой и особенно гористой местности.
Сущность отражения электромагнитных волн (радиоволн) от препятствий состоит в том, что под влиянием радиоволн в этих препятствиях возникает переменный ток, который служит источником вторичного излучения. Вблизи проводника энергия электромагнитного поля переходит в энергию возникшего в этом проводнике переменного тока. Одна часть этой энергии расходуется (поглощается) в самом проводнике, т. е. переходит в кинетическую энергию движения его молекул (в тепло). Другая часть вновь излучается в окружающее пространство. Таким образом, проводник, по которому протекает переменный ток, становится излучателем электромагнитных волн.

Рис. 2. Отражение волн от металлического проводника
Частота этого вторичного излучения та же, что и первичного. Поэтому вторичное излучение волн проводником, находящимся в поле первичных радиоволн, можно рассматривать как частичное отражение волн от этого проводника.
От объектов отражается ничтожно малая часть энергии радиоволны. Так, импульсная мощность передатчика РЛС составляет 104-105Вт, а мощность отраженного сигнала на входе антенны РЛС составляет 10-9-10-13Вт.
Чаще всего препятствием, отражающим радиоволны, служит токопроводящая поверхность. Так, в самолете отражающей поверхностью служит его металлический корпус. В нем, как и в проводнике, под влиянием радиоволн возникает переменный ток, а, следовательно, происходит излучение радиоволн, т. е. отражение падающих на корпус самолета первичных радиоволн.
В войсковой ПВО используются следующие виды
studfiles.net
Где же эффект Доплера при радиолокации Венеры?
Планеты покоятся в своих планетарных частотных воронках, поэтому локально-абсолютные скорости планет тождественно равны нулю. Отсюда, на основе выраженияследует фантастический вывод: допплеровский сдвиг в условиях, когда излучатель и приёмник находятся на разных планетах, должен иметь составляющие, обусловленные лишь движениями излучателя и приёмника в своих планетоцентрических системах отсчёта – но должна отсутствовать составляющая, которая соответствует взаимному сближению или удалению этих планет. Планета, при проведении её радиолокации, может приближаться к Земле, или удаляться от неё, со скоростью в десятки километров в секунду – но это приближение-удаление не должно вызывать соответствующий допплеровский сдвиг!
Именно этот феномен и обнаружился при проведении радиолокации Венеры в 1961 г. группой под руководством В.А.Котельникова[К1-К3]. Радиолокацию планеты энергетически выгодно проводить тогда, когда она подходит к Земле наиболее близко.
Кульминация соединения Венеры с Землёй пришлась на 11 апреля; результаты же опубликованы, начиная с наблюдений 18 апреля, когда скорость удаления Венеры составляла примерно 2.5 км/с. Соответствующий допплеровский сдвиг – удвоенный при отражении от«движущегося зеркала» – должен был иметь, в относительном исчислении, величину 1.6×10^-5.
Абсолютная же величина этого сдвига, при несущей частоте излучаемого сигнала в 700 МГц, составила бы 11.6 кГц. Поскольку ширина полосы, в которой велись поиски эхо-сигнала, не превышала 600 Гц, то, по традиционной логике, непременно требовалась компенсация эффекта Допплера, чтобы несущая эхо-сигнала попадала в полосу анализа. Для этой компенсации не перенастраивался приёмный тракт, а сдвигалась несущая излучаемого сигнала на предвычисленную величину. Конечно, не могло быть и речи о прямом наблюдении эффекта Допплера, т.е. смешении отправляемой и принимаемой частот с выделением их разностной частоты. Для такой методики требовалась широкая полоса пропускания приёмного тракта, в которой эхо-сигнал было невозможно выделить из шумов.
Применялся же многоступенчатый перенос спектра принимаемого зашумлённого сигнала в низкочастотную область, в которой делалась запись на магнитную ленту, а затем эта запись анализировалась. Принцип выделения сигнала из шумов был основан на том, что излучаемый сигнал имел прямоугольную амплитудную модуляцию с глубиной 100%.
Таким образом, в одной половине такта модуляции должны были приниматься как полезный сигнал, так и шумы, а в другой – только шумы. При правильно выбранном моменте начала обработки магнитной записи, систематическое превышение принятой мощности в первых половинах тактов модуляции, по сравнению со вторыми, свидетельствовало бы о детектировании полезного сигнала.
Анализ проводился в«широкой» полосе (600 Гц) и в«узкой» полосе (40 Гц). В
полученных спектрах широкополосной составляющей(см.[К2]) не просматривается никакой систематики, похожей на продетектированный сигнал. Особенное же недоумение вызывает тот факт, что на всех спектрах широкополосной составляющей отсутствует узкополосная составляющая, которая, по традиционной логике, непременно должна была попасть в широкую полосу анализа. Поразительно: в той же статье приведены
великолепные спектры узкополосной составляющей, положения энергетических максимумов которых позволили уточнить значение астрономической единицы, т.е. среднего радиуса орбиты Земли, на два порядка! Почему же спектры узкополосной составляющей, благодаря которым оказался возможен этот прорыв, не обнаруживались при анализе в широкой полосе?
Ответ на этот вопрос подсказывает статья[К3], где написано буквально следующее:
«Под узкополосной составляющей понимается составляющая эхо-сигнала, соответствующая отражению от неподвижного точечного отражателя»(курсив наш).
Надо полагать, что на этой фразе читатели спотыкались: какой, спрашивается, неподвижный отражатель может быть на удаляющейся вращающейся планете? И почему он точечный – какая, спрашивается, мощность может отразиться от точечного отражателя?
Дело, по-видимому, в том, что термин«точечный» употреблён здесь не для описания размеров отражателя, а для того, чтобы исключить возможность понимания термина «неподвижный» в смысле«не вращающийся». Т.е.,«неподвижный» – означает«не удаляющийся». Но каким образом можно было получить эхо-сигнал,«соответствующий»
«не удаляющемуся» отражателю, если на самом деле он удалялся? Искушённые в тонкостях
физической терминологии специалисты должны согласиться с тем, что подлинный смысл процитированной фразы таков:«Узкополосная составляющая – это эхо-сигнал, который наблюдался, когда компенсация эффекта Допплера, соответствующего удалению планеты, не проводилась». Но это означает, что когда в несущую излучаемого сигнала вносилась допплеровская поправка на удаление планеты, эхо-сигнал не обнаруживался, а когда эта поправка не вносилась – эхо-сигнал обнаруживался! Это с очевидностью свидетельствует о том, что эффект Допплера, который должен был вызываться удалением Венеры, в действительности отсутствовал. Согласно нашей модели, так и должно было быть; с официальной же теорией эти результаты несовместимы.
Добавим, что радиолокация Венеры узкополосным сигналом проводилась также зарубежными группами исследователей, и, по-видимому, всем им пришлось решать одну и ту же задачу: представить свои результаты так, чтобы прорыв не был омрачён скандалом.
Впоследствии, впрочем, были обнаружены допплеровские сдвиги у эхо-сигналов, отражённых от западного и восточного краёв диска Венеры – из-за её медленного вращения вокруг своей оси. Но главная составляющая допплеровского сдвига, из-за приближения-удаления Венеры, упорно не обнаруживалась(см. также 2.13).
В дальнейшем, благодаря быстрому развитию экспериментальной техники, при радиолокации планет стало возможно обнаружение эхо-импульсов в реальном времени, что позволило измерять временные задержки на движение радиоимпульсов до планеты и обратно. Однако, при такой методике, экспериментаторы имеют дело с широкополосными сигналами, когда принципиально исключается нахождение допплеровских сдвигов – и проблема этих сдвигов перешла в разряд«неактуальных». Секрет успешной радиолокации
Венеры в 1961 г. так и остался неизвестен для широкой научной общественности.
Пояснения

Из книги “ЭТОТ«ЦИФРОВОЙ» ФИЗИЧЕСКИЙ МИР”, А.А. Гришаев.
rodline.livejournal.com
Радиолокация
1. Что такое радиолокация?
Радиолокация – область науки и техники, предмет которой – наблюдение различных объектов (целей) радиотехническими методами: их обнаружение, распознавание, определение их координат и скорости и др.
Еще А.С. Попов заметил, что радиоволны имеют способность отражаться. На этом и основан принцип действия радиолокационной станции. Мощный луч радиолокационного передатчикам фокусируется большой антенной в направлении исследуемого объекта, фиксируется и изучается отраженный радиосигнал, на основе чего делаются выводы о тех или иных характеристиках объекта.
2. Начало радиолокации.
Первые работы по созданию радиолокационных систем начались в нашей стране в середине 30-х годов. Впервые идею радиолокации высказал научный сотрудник Ленинградского электрофизического института (ЛЭФИ) П.К. Ощепков еще в 1932 году. Позднее он же предложил идею импульсного излучения.
16 января 1934 года в Ленинградском физико – техническом институте (ЛФТИ) под председательством академика А. Ф. Иоффе состоялось совещание, на котором представители ПВО РККА поставили задачу обнаружения самолетов на высотах до 10 и дальности до 50 км в любое время суток и в любых погодных условиях. За работу взялись несколько групп изобретателей и ученых. Уже летом 1934 года группа энтузиастов, среди которых были Б. К. Шембель, В.В. Цимбалин и П. К. Ощепков, представила членам правительства опытную установку. Проект получил необходимое финансирование и в 1938 году был испытан макет импульсного радиолокатора, который имел дальность действия до 50 км при высоте цели 1,5 км. Создатели макета Ю, Б, Кобзарев, П, А, Погорелко и Н, Я, Чернецов в 1941 году за разработку радиолокационной техники были удостоены Государственной премии СССР. Дальнейшие разработки были направлены в основном на увеличение дальности действия и повышение точности определения координат. Станция РУС- 2 принятая летом 1940 года на вооружение войск ПВО не имела аналогов в мире по своим техническим характеристикам , она сослужила хорошую службу во время Великой Отечественной войны при обороне Москвы от налетов вражеской авиации. После войны перед радиолокационной техникой новые сферы применения во многих отраслях народного хозяйства. Без радаров теперь немыслимы авиация и судовождение. Радиолокационные станции исследуют планеты Солнечной системы и поверхность нашей Земли, определяют параметры орбит спутников и обнаруживают скопления грозовых облаков. За последние десятилетия радиолокационная техника неузнаваемо изменилась.
3. Основы радиолокации.
Определение координат цели радаром производится с учетом выбранной системы координат. Выбор той или иной системы координат связан со сферой применения радиолокационной установки. Например, наземная радиолокационная станция (РЛС) наблюдения за воздушной обстановкой измеряет три координаты цели: азимут, угол места и наклонную дальность.
α
Система координат обзорной РЛС :
α – азимут; ß- угол места; R – наклонная дальность
РЛС такого типа используются на аэродромах . Работает эта станция в сферической системе координат.
Различают два основных режима работы РЛС : режим обзора (сканирования) пространства и режим слежения за целью. В режиме обзора луч РЛС по строго определенной системе просматривает все пространство или заданный сектор. Антенна , например, может медленно поворачиваться по азимуту и в то же время быстро наклоняться вверх и вниз, сканируя по углу места. В режиме слежения антенна все время направлена на выбранную цель и специальные следящие системы поворачивают ее вслед за движущейся целью.
Удаленность того или иного объекта определяется по запаздыванию отраженного сигнала относительно излучаемого. Запаздывание сигнала очень мало, поскольку радиоволны распространяются со скоростью, близкой к скорости света (300 000 км/с). Действительно, для самолета, находящегося на расстоянии 3 км от РЛС, запаздывание сигнала составит всего 20 мкс. Такой результат получается из – за того, что радиоволна проходит путь в обоих направлениях, к цели и обратно, так что общее расстояние, пройденное волной, составит 6 км. Однако при радиолокации Марса, успешно проведенной в начале 60-х годов, задержка сигнала составила около 11 мин, а это время малым назвать нельзя. Современная вычислительная техника способна с высокой точностью обрабатывать сигналы с ничтожным временем запаздывания, поэтому с помощью радаров можно регистрировать объекты, расположенные как на больших, так и на малых расстояниях от наблюдателя. Существует единственное существенное ограничение применения радаров в целях сверхдальних наблюдений – это ослабление сигнала. Если сигнал проходит большое расстояние, то он частично рассеивается, искажается и ослабевает и выделить его в приемнике из собственных шумов приемника и шумов иного происхождения зачастую крайне затруднительно. Ослабление сигнала при радиолокации вполне поддается расчету , который основан на простых физических соображениях. Если в какой – то точке излучается мощность Р , то поток мощности через единичную площадку, находящуюся на расстоянии R , будет пропорционален Р/4pR^2. В знаменателе стоит площадь сферы радиусом R, окружающей источник. Таким образом, при обычной радиосвязи мощность, принятая антенной, обратно пропорциональна квадрату расстояния. Этот закон – закон сферической расходимости пучка энергии – выполняется всегда при распространении волн в свободном пространстве. Даже если сконцентрировать излучаемую мощность в узкий луч и поток энергии возрастет в несколько раз ( этот коэффициент называется коэффициентом направленного действия антенны, КНД ), квадратичная зависимость от расстояния сохранится. Но в радиолокации радиосигнал преодолевает двойные расстояния, а сама облучаемая цель рассеивает энергию по
всем направлениям , и если облучающий цель поток энергии ослабевает обратно пропорционально R^2 то приходящий к приемнику рассеяный поток еще ослабляется во столько же раз и оказывается обратно пропорциональным R^4. Это означает, что для повышения дальности действия РЛС в два раза при прочих равных условиях мощность ее передатчика надо повысить в 16 раз. Столь высокой ценой достигаются высокие характеристики современных РЛС.
4. Радиолокационная техника.
Рассмотрим структурные схемы простейших радиолокаторов. Доплеровская РЛС непрерывного излучения – самая простая из всех. Именно по такому принципу были построены первые «радиоуловители» самолетов. Она содержит генератор высокочастотных колебаний ( ГВЧ), передающую Апер и приемную Апр антенны, смеситель и усилитель низкой частоты биений (УНЧ) . На его выходе включаются либо наушники, либо частотомер.
mirznanii.com
Метод радиолокации
РАДИОЛОКАЦИЯ, метод обнаружения и определения местонахождения объектов посредством радиоволн. Эти волны излучаются радиолокационной станцией, отражаются от объекта и возвращаются на станцию, которая анализирует их, чтобы точно определить место, где находится объект.
ПРИМЕНЕНИЯ
Военные применения. Одним из первых важных применений радиолокации были поиск и дальнее обнаружение. Перед Второй мировой войной Великобритания построила не очень совершенную, но довольно эффективную сеть радиолокационных станций дальнего обнаружения для защиты от внезапных воздушных налетов со стороны Ла-Манша. Более совершенные радиолокационные сети защищают Россию и Северную Америку от внезапного нападения авиации или ракет. Корабли и самолеты также оснащаются радиолокаторами. Таким образом, стало возможным наведение истребителей на вражеские бомбардировщики с наземных радиолокаторов слежения или с корабельных радиолокаторов перехвата; можно также использовать бортовые самолетные радиолокаторы для обнаружения, слежения и уничтожения техники противника. Бортовые радиолокаторы важны для поиска, осуществляемого над сушей или морем, и оказания помощи в навигации или при слепом бомбометании.
Ракеты с радиолокационным наведением оснащаются для выполнения боевых задач специальными автономными устройствами. Для распознавания местности на самонаводящейся ракете имеется бортовой радиолокатор, который сканирует земную поверхность и соответствующим образом корректирует траекторию полета. Радиолокатор, расположенный поблизости от противоракетной установки, может непрерывно отслеживать полет межконтинентальной ракеты. За последние годы в обычные методы и средства радиолокации было внесено много нового – появилась, в частности, система для одновременного слежения за многими целями, находящимися на разных высотах и азимутах; кроме того, разработан способ усиления сигналов радиолокатора без увеличения фонового шума.
Невоенные применения. Океанские суда используют радиолокационные системы для навигации. Служба береговой охраны США применяет радиолокационно-телевизионную навигационную систему «Ратан» для получения телевизионно-радиолокационного изображения на подходах к гавани Нью-Йорка. На промысловых траулерах радиолокатор находит применение для обнаружения косяков рыбы.
На самолетах радиолокаторы используют для решения ряда задач, в том числе для определения высоты полета относительно земли. В аэропортах один радиолокатор служит для управления воздушным движением, а другой – радиолокатор управления заходом на посадку – помогает пилотам посадить самолет в условиях плохой видимости. См. также АЭРОНАВИГАЦИЯ; АЭРОПОРТ; ВОЗДУШНЫМ ДВИЖЕНИЕМ УПРАВЛЕНИЕ; НАВИГАЦИЯ.

АНТЕННА системы дальней космической связи (Голдстоун, шт. Калифорния).
В широких масштабах радиолокация применяется для прогнозирования погоды. Национальная метеорологическая служба использует специально оборудованные самолеты, оснащенные радиолокаторами, для отслеживания всех метеопараметров; наземные РЛС помогают им в этой работе. Коммерческие авиалайнеры пользуются радиолокаторами, чтобы избежать погодных и атмосферных аномалий. См. также МЕТЕОРОЛОГИЯ И КЛИМАТОЛОГИЯ.
В космических исследованиях радиолокаторы применяют для управления полетом ракет-носителей и слежения за спутниками и межпланетными космическими станциями. Радиолокатор намного расширил наши знания о Солнечной системе и ее планетах. См. также ЛУНА; РАДИОЛОКАЦИОННАЯ АСТРОНОМИЯ; КОСМОСА ИССЛЕДОВАНИЕ И ИСПОЛЬЗОВАНИЕ.
АППАРАТУРА
Радиоволны отражаются (или рассеиваются) всеми объектами, которые создают при этом эхо-сигналы, аналогичные звуковым эхо. Когда луч радиолокатора встречает на своем пути какой-либо объект – самолет, корабль, айсберг, стаю птиц или даже облако, – он отражается от объекта в широком диапазоне углов. Часть волновой энергии попадает на приемник радиолокатора, принося с собой информацию о положении объекта.
Импульсный радиолокатор. На рис. 1 представлена принципиальная схема импульсного радиолокатора. Сигналы, посылаемые таймером, возбуждают генератор импульсов и одновременно поступают на индикатор. Генератор импульсов запускает передатчик, и он посылает импульсы энергии в антенну, которая направляет луч на цель. Часть энергии, отраженной от цели, возвращается обратно в антенну, усиливается в приемнике и выводится на индикатор. После этого может быть определено расстояние (дальность) до цели. Угловое направление в горизонтальной плоскости на цель и высота цели определяются соответственно угловым направлением (азимутом) и углом возвышения луча антенны в точке, где эхо-сигнал имеет максимальную величину.
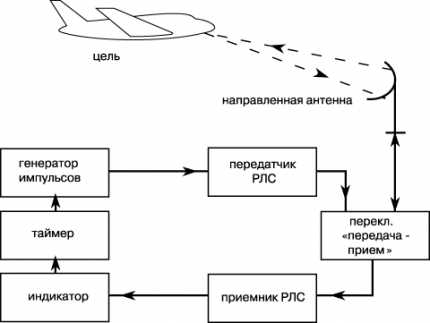
Рис. 1. ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА
Доплеровский радиолокатор. Радиолокатор этого типа особенно подходит для получения информации о движущихся объектах. Радиолокационная система излучает непрерывный сигнал неизменной частоты. Если объект движется по направлению к радиолокатору, то отраженный сигнал имеет несколько более высокую частоту, а если объект удаляется от радиолокатора, то частота отраженного сигнала оказывается ниже частоты излученного сигнала. Это явление называется эффектом Доплера. См. также ДОПЛЕРА ЭФФЕКТ.
Радиолокационные экраны. Для измерений времени, прошедшего от момента посылки РЛС исходного импульса до момента получения отраженного, используется экран телевизионного типа. Радиолокационные экраны нескольких типов показаны на рис. 2. Поперек экрана типа A электронный луч прочерчивает горизонтальную линию развертки. Посылаемый радиолокатором и принятый отраженный сигналы вызывают отклонения электронного луча в вертикальном направлении. Расстояние между этими двумя пиками служит мерой времени, которое сигнал затратил на прохождение расстояния до цели и обратно. На линии развертки может быть нанесена шкала расстояний до цели в метрах или километрах. Разработан трехмерный радиолокационный индикатор, на экране которого отображались дальность до цели, ее азимут и угол возвышения. Этот экран, известный как экран типа G, позднее был приспособлен для использования в системах управления воздушным движением.
Рис. 2. ТИПЫ РАДИОЛОКАЦИОННЫХ ЭКРАНОВ
Радиоизлуче́ние (радиово́лны , радиочастоты ) — электромагнитное излучение с длинами волн 5×10−5 —1010 метров и частотами, соответственно, от 6×1012 Гц и до нескольких Гц[1] . Радиоволны используются при передаче данных в радиосетях.
История исследования
В 1888 году Г.Р. Герц впервые смог получить электромагнитные волны с длиной волны в несколько десятков сантиметров[2] .
Диапазоны радиочастот и длин радиоволн
См. также статьи : Диапазон частот , Частота периодического процесса
Радиочастоты — частоты или полосы частот в диапазоне 3 кГц — 3000 ГГц, которым присвоены условные наименования. Этот диапазон соответствует частоте переменного тока электрических сигналов для вырабатывания и обнаружения радиоволн. Так как большая часть диапазона лежит за границами волн, которые могут быть получены при механической вибрации, радиочастоты обычно относятся к электромагнитным колебаниям.
Закон РФ «О связи» устанавливает следующие понятия, относящиеся к радиочастотам:
- радиочастота — частота электромагнитных колебаний, устанавливаемая для обозначения единичной составляющей радиочастотного спектра;
- радиочастотный спектр — совокупность радиочастот в установленных Международным союзом электросвязи пределах, которые могут быть использованы для функционирования радиоэлектронных средств или высокочастотных устройств;
- распределение полос радиочастот — определение предназначения полос радиочастот посредством записей в Таблице распределения полос радиочастот между радиослужбами Российской Федерации, на основании которых выдается разрешение на использование конкретной полосы радиочастот, а также устанавливаются условия такого использования
Использование диапазонов по радиослужбам регламентируется Регламентом радиосвязи Российской Федерации и международными соглашениями.
- ГОСТ 24375 даёт следующую обобщённую разбивку радиочастотного диапазона, основанную на международных стандартах:
- Очень низкие частоты — 3—30 кГц, соответствует сверхдлинным волнам
- Низкие частоты — 30—300 кГц, соответствует длинным волнам
- Средние частоты — 300—3000 кГц, соответствует средним волнам
- Высокие частоты — 3—30 МГц, соответствует коротким волнам
- Очень высокие частоты — 30—300 МГц, соответствует ультракоротким (или метровым волнам)
- Ультравысокие частоты — 300—3000 МГц, соответствует дециметровым волнам
- Сверхвысокие частоты — 3—30 ГГц, соответствует сантиметровым волнам
- Крайне высокие частоты — 30—300 ГГц, соответствует миллиметровым волнам
- Гипервысокие частоты — 300—3000 ГГц, соответствует субмиллиметровым волнам
Вышеприведённая классификация не получила широкого распространения и в ряде случаев вступает в противоречие с национальными стандартами (ГОСТ) в области радиоэлектроники. На практике под низкочастотным диапазоном подразумевается звуковой диапазон, а под высокочастотным — весь радиодиапазон, выше 30 кГц, в том числе сверхвысокочастотный (свыше 300 МГц).
mirznanii.com