
Назначение гироскопических датчиков и системы их использования в современных навигационных системах
Эффективность и конкурентоспособность современных летательных аппаратов (ЛА) во многом определяется совершенством гироскопических датчиков первичной информации, на базе которых строятся навигационные системы и системы управления ЛА.В настоящее время существует большое многообразие различных типов гироскопических датчиков, правильное применение которых обеспечивает необходимые эксплуатационные качества ЛА.
Каждому типу гироскопических датчиков можно найти оптимальную нишу применения. При выборе гироскопического датчика учитываются следующие его основные характеристики: точность, надежность работы, энергопотребление, габаритные размеры и стоимость. В зависимости от требований, предъявляемых к системам управления и навигационным системам, выбирается соответствующий тип гироскопического датчика.
Тем не менее, из всего многообразия датчиков можно выделить наиболее перспективные по указанным выше характеристикам. Это лазерные гироскопы (ЛГ), волоконно-оптические (ВОГ), волновые твердотельные (ВТГ) и микромеханические гироскопы (ММГ).
Гироскопические датчики являются источниками первичной информации при построении пилотажных и навигационных систем летательных аппаратов.
В пилотажных системах они используются в основном в качестве датчиков угловых скоростей в цепях обратной связи автоматических систем управления. В навигационных системах — в качестве датчиков углового положения самолета или индикатора нулевого положения гиростабилизированной платформы. В качестве датчиков линейных ускорений используются акселерометры.
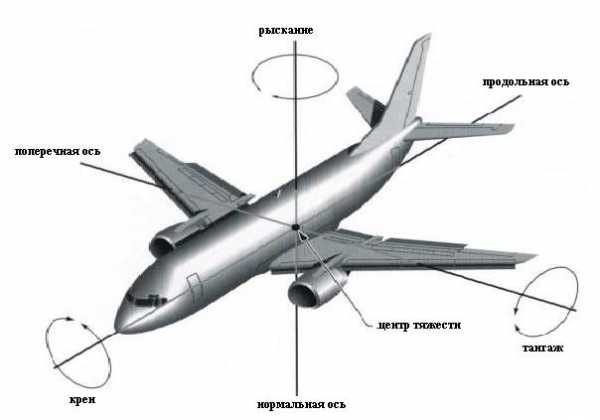
Рис. 1.1 Углы ориентации самолета
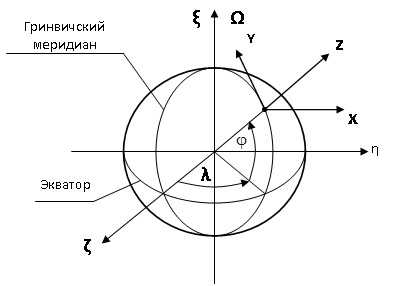
Рис.1.2 Системы координат, в которых определяется положение летательного аппарата
На рисунках 1.1, 1.2: – географическая система координат, где ось ξ – совпадает с осью вращения Земли и направлена на Север; ось ς – лежит в плоскости экватора и проходит через Гринвичский меридиан; ось η – также лежит в плоскости экватора и направлена на Восток. – базовый сопровождающий трехгранник, относительно которого определяется угловое положение летательного аппарата, где ось X – направлена на Восток; ось Y – направлена на Север по меридиану; ось Z – по вертикали местности. – оси измерительного трехгранника инерциальной навигационной системы.
Независимо от типа навигационной системы информация о скорости полета летательного аппарата и пройденном пути находится из показаний акселерометров путем интегрирования их выходных сигналов – линейных ускорений . Однако достоверность этой информации зависит от точности определения положения осей чувствительности акселерометров относительно заданных в инерциальном пространстве базовых измерительных осей – осей инерциального сопровождающего трехгранника.
В платформенных навигационных системах заданное положение осей базового сопровождающего трехгранника достигается стабилизацией положения в инерциальном пространстве платформы, на которой установлены акселерометры. Необходимая стабильность положения обеспечивается системами автоматического регулирования трех рам карданова подвеса, в которых в качестве датчиков системы регулирования используются, как правило, механические двух или трехстепенные гироскопы с быстро вращающимся ротором, а в качестве исполнительного органа – датчики моментов (DM) соответствующих рам карданова подвеса.
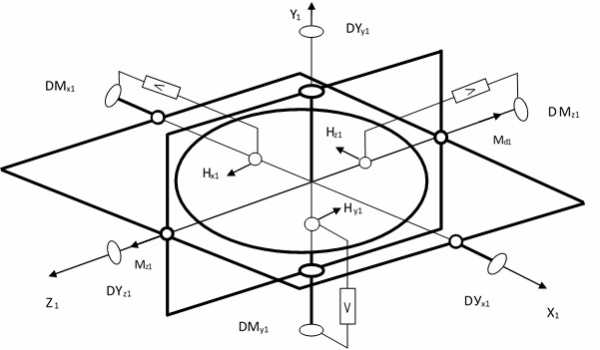
Рис.1.3 Схема построения платформенной навигационной системы
Гироскопы устанавливаются на той же платформе, что и акселерометры (рис.1.3). Чем выше точность гироскопов, тем с меньшей погрешностью осуществляется стабилизация положения платформы, тем точнее определяются скорость и местоположение летательного аппарата.
В качестве примера рассмотрим стабилизацию положения платформы по одной из измерительных осей навигационной системы – по оси (рис.1.3). При повороте платформы под действием возмущающего момента вокруг оси ось гироскопа начнет прецессировать (поворачиваться) вокруг оси на угол ε. В датчике угла гироскопа появится напряжение рассогласования Uε, которое после усиления подается на моментный двигатель тангажной рамы. Последний создаст момент , под действием которого рама будет возвращаться в исходное положение. При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла , установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.
Из представленной схемы видны основные недостатки платформенных инерциальных систем – большое количество механических вращающихся элементов, наличие аналоговых систем регулирования и, как следствие, невысокая надежность работы системы.
В БИНСах нет карданова подвеса, а роль стабилизированной платформы выполняет базовый сопровождающий трехгранник (рис.1.2), относительно которого определяется положение измерительных осей БИНС в процессе полета летательного аппарата.
В качестве гироскопических датчиков в БИНС используются три одноосных гироскопа и три акселерометра, которые жестко устанавливаются в блоке чувствительных элементов БИНС по трем ортогональным измерительным осям (рис.1.4). Блок чувствительных элементов, в свою очередь, жестко связан с корпусом летательного аппарата.
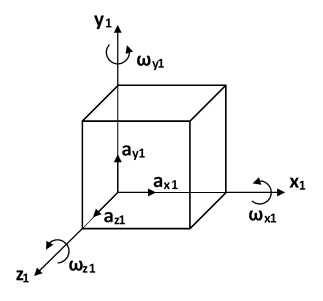
Рис.1.4 Измерительные оси блока чувствительных элементов БИНС
Гироскопы служат для определения углового положения измерительных осей блока чувствительных элементов относительно базового сопровождающего трехгранника, то есть углов крена, тангажа и курса летательного аппарата. Поскольку используемые в БИНС гироскопы работают, как правило, в режиме датчиков угловых скоростей, то для определения указанных углов их показания интегрируются . Показания акселерометров, как и в платформенных системах, служат для определения скорости движения летательного аппарата и пройденного им пути. С этой целью показания акселерометров также интегрируются .
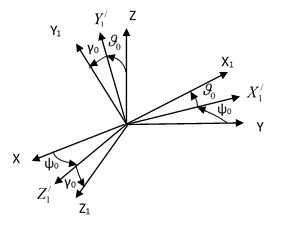
Рис.1.5 Начальные углы выставки БИНС
Перед началом полета осуществляется выставка БИНС, то есть определение начального углового положение измерительных осей () относительно осей базового сопровождающего трехгранника () (рис.1.5). Величина этих углов заносится в бортовой компьютер и учитывается при определении углового положения самолета в процессе его полета.
Полное отсутствие механических вращающихся частей делает БИНС чрезвычайно надежной системой в эксплуатации, а использование высокоскоростной бортовой вычислительной машины позволяет повысить точность такой системы за счет алгоритмической компенсации погрешностей гироскопических датчиков, обусловленных колебаниями температуры окружающей среды и механическими воздействиями.
В данном посте рассмотрена малая часть материала, представленная в книге к.т.н. Галкина В.И. «Перспективные гироскопы летательных аппаратов» ISNB 978-3-659-47948-9
В дальнейшем буду предоставлять еще немного информации из этой книги. Но тем кто заинтересовался и кому была полезна статья прошу выразить интерес в покупке книги.
habr.com
Что такое гироскоп в телефоне?
Июнь 2016
Современные мобильные устройства оснащаются большим количеством интересных функций и модулей. Одним из таких является гироскоп, и если совсем недавно устройство было диковинной новинкой в девайсе, то сегодня оно используется повсеместно и удивить наличием такой функции современного пользователя сложно. И хотя часть потребителей находят гироскоп весьма полезным изобретением, некоторые все же предпочитают сразу отключить его. Устройство еще называют гиродатчиком.
ЧТО ТАКОЕ ГИРОСКОП
 Гироскоп представляет собой устройство, реагирующее на изменения углов ориентации тела, на которое оно устанавливается. В качестве самого элементарного примера можно привести детскую игру – юлу. Прибор был изобретен И. Боненбергером (немецкий математик и астроном) в далеком 1817-м, однако, существует информация о том, что ученый создал свое детище несколько раньше – в 1813-м. Происхождение самого слова древнегреческое и состоит из двух слов: γῦρος – «круг» и σκοπέω – «смотрю». Гиродатчик используется во многих серьезных сферах науки и техники – судоходстве, космонавтике, авиации, в производстве техники бытового назначения, игрушек, и, конечно же, мобильных телефонов.
Гироскоп представляет собой устройство, реагирующее на изменения углов ориентации тела, на которое оно устанавливается. В качестве самого элементарного примера можно привести детскую игру – юлу. Прибор был изобретен И. Боненбергером (немецкий математик и астроном) в далеком 1817-м, однако, существует информация о том, что ученый создал свое детище несколько раньше – в 1813-м. Происхождение самого слова древнегреческое и состоит из двух слов: γῦρος – «круг» и σκοπέω – «смотрю». Гиродатчик используется во многих серьезных сферах науки и техники – судоходстве, космонавтике, авиации, в производстве техники бытового назначения, игрушек, и, конечно же, мобильных телефонов.
НЕ ПУТАЙ С АКСЕЛЕРОМЕТРОМ
Среди пользователей есть мнение, что гироскоп – это тот же акселерометр, и функции, соответственные. Но это не так – назначение последнего заключается в отслеживании поворотов агрегата в пространстве. Гироскоп же фиксирует перемещения телефона в пространстве, скорость перемещения, определяет стороны света. В целом можно сказать, что функционал у этих двух устройств схож и гиродатчик – это как бы улучшенный акселерометр. Последний отвечает за повороты дисплея, а гироскоп за передвижения в 3-х плоскостях. Актуально наличие гироскопа для использования различных приложений.
ФУНКЦИИ ГИРОСКОПА В СМАРТФОНЕ
Применение гиродатчика в смартфонах открыло абсолютно новые, неизведанные, захватывающие возможности. Современный пользователь сумеет по достоинству оценить функционал этого устройства в своем девайсе. К примеру, элементарным встряхиванием телефона можно отвечать на звонки, просматривать фото, изображения, переворачивать странички в электронной книге, в плеере можно переключить песню. Невероятно удобен гиродатчик в калькуляторе: портретное использование его позволяет выполнять минимальное количество функций – поделить, умножить, сложить, вычесть. Но, как только пользователь повернет телефон на девяносто градусов калькулятор автоматически перейдет в другой режим – на дисплее смартфона появится расширенный функционал с массой дополнительных действий.
Помимо простых функций специалисты нашли для гороскопа применение и в различных видах программного обеспечения. В некоторых операционках встряхивание телефона запускает обновление Bluetooth. Нашлось место для гиродатчика и в работе специфических программ, которые предназначаются для измерения углов наклона и уровня. Очень удобен гироскоп, когда необходимо определить местоположение пользователя на незнакомой местности. При помощи GPS-навигации можно использовать карту, которая при любом повороте человека менять свое направление в ту же сторону, то есть, если пользователь повернут лицом к озеру, это автоматически отобразится на карте, если повернется спиной к водоему – произойдут изменения и на карте. Такой помощник значительно упрощает ориентирование на местности и станет чрезвычайно полезным для людей, увлеченных активными видами отдыха.
К сожалению, не обошлось и без минусов из-за которых некоторые пользователи предпочитают отказаться от использования гироскопа в своем смартфоне и попросту отключить его. К таким недостаткам можно отнести то, что некоторые приложения реагируют на изменения положения в пространстве с небольшим опозданием. В качестве примера можно рассмотреть чтение лежа электронной книги с мобильного устройства: если пользователь при этом будет менять свою позу, то гиродатчик и приложение, связанное с устройством, также будут менять ориентацию странички. Это доставляет определенные неудобства.
КТО И КАК ИСПОЛЬЗУЕТ ГИРОСКОП ЧАЩЕ ВСЕГО
 Конечно же это геймеры. Именно они по достоинству оценят наличие гироскопов в смартфонах. Наличие данного устройства в девайсе превращает процесс игры в совершенно иное качество – картинка становится более реалистичной. В основном это гонки, шутеры, симуляторы. В шутерах выстрел необходимо осуществить при помощи нажатия и для того, чтобы навести прицел, необходимо изменить положение телефона, а камера в игрушке повернется вслед за девайсом, в гонках входы в повороты на виртуальном авто настолько реалистичны, что по ощущениям это можно сравнить с ездой на реальном авто.
Конечно же это геймеры. Именно они по достоинству оценят наличие гироскопов в смартфонах. Наличие данного устройства в девайсе превращает процесс игры в совершенно иное качество – картинка становится более реалистичной. В основном это гонки, шутеры, симуляторы. В шутерах выстрел необходимо осуществить при помощи нажатия и для того, чтобы навести прицел, необходимо изменить положение телефона, а камера в игрушке повернется вслед за девайсом, в гонках входы в повороты на виртуальном авто настолько реалистичны, что по ощущениям это можно сравнить с ездой на реальном авто.
АКТУАЛЬНЫЙ КАТАЛОГ СМАРТФОНОВ ХАЙСКРИН 2018
Каталог смартфонов
highscreen.ru
Гироскопический датчик
Уже давно существуют электронные гироскопы — преобразователи наклона и угловой скорости в электрический ток. Так же как и ротационные, пьезокерамические электронные гироскопы служат для контроля положения и угловых скоростей с малым временем отклика (до 50 Гц). Гироскопические датчики марки ENC-03 J и ENC-03M появились в розничной торговой сети совсем недавно.
Они предназначены для работы в качестве датчиков изменения наклона в видеокамерах и высокотехнологичных фотоаппаратах — для компенсации дрожания руки или штатива, для определения вибрации устройств, для которых необходима стабилизация как горизонтального, так и вертикального положения, а также для определения собственного движения. Отличием
электронных гироскопов от механических собратьев являются компактность и легкость.
Кроме того, электронные гироскопы выпускаются также и в ЧИП-исполнении, что позволяет использовать их для поверхностного монтажа.
На основе такого электронного датчика создано простое устройство, которое посредством светоизлучающего светодиода сигнализирует о изменении своего, ориентированного на горизонтальную поверхность, положения. Схема прибора показана на рис.1. Основу устройства составляет пьезокерамический гироскоп ENC-03J производства фирмы Murata.
При горизонтальном положении прибора постоянное напряжение на выводе 4 датчика U1 составляет 1,3-1,4 В при Un= 5 В. При изменении горизонтального положения датчика (отклонения от 0°) напряжение на выходе U1 (вывод 4) резко изменяется в соответствии с коэффициентом преобразования 0,67 мВ/° отклонения в секундах. Период опроса состояния составляет около 50 Гц. Максимальная угловая скорость относительно строго горизонтального положения (уровень 0) составляет ±300°/с.
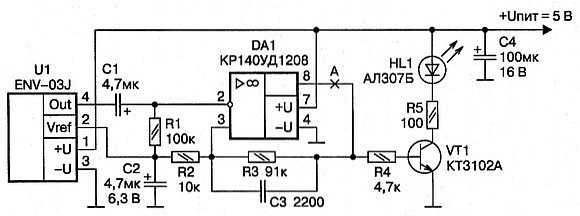
Рис. 1. Гироскопический датчик. Принципиальная схема
Все постоянные резисторы типа МЛТ-0,25 или MF-25. Конденсатор С1 неполярный типа К10-17. С2— оксидный полупроводниковый танталовый, типа К52-х или К53-х. СЗ — типа КМ-6Б. Оксидный конденсатор С4 типа К50-20 сглаживает пульсации источника питания. Если применяется автономный источник питания — батарея или аккумулятор, данный конденсатор из схемы исключается. Светодиод HL1 — любой типа АЛ307Б или аналогичный. Для лучшего визуального контроля можно использовать светодиод с эффектом мигания. Вместо операционного усилителя КР140УД1208 можно применять КР140УД12, КР140УД20 с любым буквенным индексом. Транзистор VT1 — любой кремниевый п-р-п типа с коэффициентом усиления более 40.
Устройство в налаживании не нуждается. В связи с высокой чувствительностью пьезокерамического датчика U1 необходимо жестко крепить его к корпусу устройства, который в свою очередь должен иметь максимально ровную горизонтальную поверхность.
При монтаже элементов устройства не перегревайте выводы датчика жалом разогретого паяльника (время пайки не более 1 с).
Гироскопический датчик прост в использовании — достаточно установить его на контролируемой поверхности (если предполагается контроль наклона и стабилизации) или поместить в другую (не жидкую) контролируемую среду для контроля вибрации. Источник питания для устройства — стабилизированный с постоянным напряжением 3-5 В. Ток потребления всего узла с датчиком ENC-03J не превышает 5 мА.
На главную>>>
www.stalvit.ru
Датчик положения (гироскоп/акселерометр) [Роботрек вики]
 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1) Модель MPU-6050
2) Напряжение питания : от 3.3 до 5.0 В
3) Рабочий ток: < 5 мА
4) Диапазон измеряемых акселерометром ускорений: +/- 2g, +/- 4g, +/- 8g, +/- 16g
5) Диапазон измеряемых гироскопом угловых скоростей: ± 250, 500, 1000, 2000 °/сек
6) Количество осей: 3
7) Интерфейс подключения: 4-проводной I2C
Описание
 Углы крена, тангажа, рыскания
Углы крена, тангажа, рысканияС помощью комбинированного модуля гироскопа и акселерометра можно измерять ориентацию робота в пространстве в углах поворота вокруг трех осей: продольной оси «X» (угол крена), поперечной оси «Y» (угол тангажа), вертикальной оси «Z» (угол рыскания).
Ориентация осей X и Y относительно корпуса указана на плате датчика. «Стрелка» поворота указывает в сторону увеличения угла. Ось «Z» направлено вертикально вверх относительно «лицевой» стороны платы, на которой располагаются все компоненты. Угол поворота вокруг оси увеличивается при повороте по часовой стрелке.
 Ориентация осей относительно датчика
Ориентация осей относительно датчикаИспользование
Подключение
Модуль датчика положения использует интерфейс I2C и подключается к любому из двух соответствующих портов I2C контроллера “Трекдуино”.
Схема подключения проводов:
| На датчике | На контроллере (I2C) |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
Программирование
Блок, необходимые для работы с датчиком, расположены в группе блоков «Датчики» и называется «Положение»
При работе с датчиком положения из текстовой среды необходимо вручную подключать соответствующую библиотеку gyro_accel.h и вызывать функцию калиброки setupAccel() в секции setup():
#include <accel_gyro.h> //подключение библиотеки
void setup()
{
setupAccel();//калибровка. Датчик должен неподвижно располагаться на горизонтальной поверхности.
}
void loop()
{
//ваш код
}При использовании графического блока эти функции генерируются автоматически.
| Блок и генерируемая им функция | Описание |
|---|---|
float readAccelAngle(char axis, int mode) | Возвращает дробное значение типа float, соответствующее углу поворота по оси. Аргументы: |
Режимы работы
Так как датчик совмещает в себе два устройства (гироскоп и акселерометр), то и выдавать показания он может основаваясь на каждом из них (режимы «только акселерометр» и «только гироскоп»), либо комбинируя эти показания для усреднения и стабилизации (режим «усредненный»)
Режим «Только акселерометр»: углы измеряются только акселерометром на основании измерения вектора силы тяжести.
Плюсы: нет накапливающейся во времени погрешности
Минусы: показания крайне нестабильны, чувствительны к вибрации и боковым ускорениям
Так как основываясь на информации о положении вектора силы тяжести невозможно определить вращение вокруг вертикальной оси Z, при попытке получить показания по оси Z в режиме «только акселерометр» вы всегда будете получать «0». Определение вращения вокруг Z возможно только в режимах «только гироскоп» и «усредненный»
Режим «Только гироскоп»: углы измеряются гироскопом путем измерения угловых скоростей и интегрирования их по времени.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации
Минусы: ошибка накапливается во времени. Показания зависят от временных промежутков между измерениями. Чем чаще производятся измерения, тем точнее результат.
Режим «Усредненный» (рекомендуется в большинстве случаев): показания обоих датчиков программно комбинируются, взаимно устраняя недостатки друг друга. Показания акселерометра, ошибка в которых не накапливается во времени, «фильтруются» показаниями гироскопа, таким образом скачки в показаниях при случайных ускорениях и вибрации игнорируются.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации.
Минусы: по оси Z все равно накапливается ошибка, так как для нее используется только гироскоп.
Примеры использования в проектах
Вывод показаний по трем осям в последовательный порт
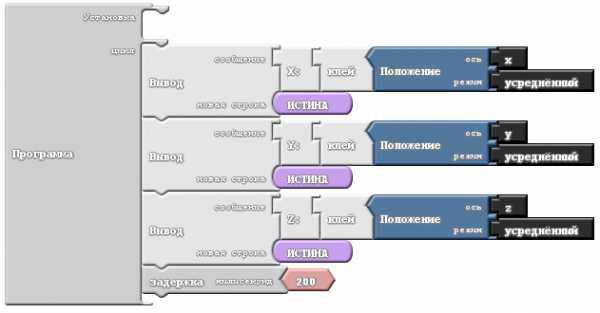
Генерируемый код:
#include <accel_gyro.h>
void setup()
{
Serial.begin(115200);
setupAccel();
}
void loop()
{
Serial.print("X:");
Serial.print(readAccelAngle('x',FILTERED));
Serial.println();
Serial.print("Y:");
Serial.print(readAccelAngle('y',FILTERED));
Serial.println();
Serial.print("Z:");
Serial.print(readAccelAngle('z',FILTERED));
Serial.println();
delay( 200 );
}ehlektronika/datchiki/datchik_polozhenija.txt · Последние изменения: 2017/06/05 16:55 (внешнее изменение)
robotrack-rus.ru
Дрейф датчика гироскопа и правильная оценка угла Oh! Android
Насколько мне известно, в SensorManager реализован фильтр Kalman или что-то подобное. Проверьте Sensor Fusion на устройствах Android: революция в обработке движения .
Вы пытаетесь решить проблему, которая уже решена.
Я являюсь автором приложения компаса, объединяющего данные от магнитных и гироскопических датчиков ( устойчивый компас ). Я тестировал это приложение в основном на LG Optimus black (устройство, которое вы можете видеть на видео) под управлением Android 2.2, поэтому я собираюсь поделиться своим опытом:
- Показания гироскопа очень точны. Этот датчик просто противоположен акселерометру и магнитным датчикам, которые дают показания с большим джиттером.
- Показания гироскопа (т. Е. Угловая скорость) вообще не дрейфуют. У вас будет дрейф в оценке ориентации, если вы просто интегрируете показания гироскопа. Поскольку вы интегрируете образцы в разное время, вы получите просто подход, который будет деградировать после каждого шага интеграции.
- Чтобы избежать такого дрейфа в оценке ориентации, вы должны рассмотреть другие источники ввода, чтобы исправить результаты, полученные из интеграции данных гироскопа. Решением является интеграция данных, поступающих с датчика ориентации (магнитное + ускорение) и данных, поступающих с гироскопа.
Будьте осторожны с телефонами LG: согласно API Android, гироскоп вернет данные в рад / с. LG Optimus Black с Froyo дает показания в градусах / с. Обновление для Android 2.3 только что было выпущено для такого телефона. Я должен проверить, ведет ли новая версия в соответствии со спецификациями.
Какая версия Android имеет ваш телефон? Вы тестировали любое приложение с помощью гироскопа? Получили ли вы ожидаемые результаты?
В основном гироскопы дрейфуют в течение длительных периодов времени. В то время как акселерометры не имеют дрейфа, но имеют тенденцию быть неустойчивыми. Объединив информацию с обоих датчиков с помощью фильтра Калмана, вы можете получить точное отношение. Для некоторых этих менее сложных вы также можете использовать дополнительный фильтр.
См. Это сообщение для получения дополнительной информации: Комбинированные данные гироскопа и акселерометра
www.ohandroid.com
что это и для чего оно нужно
В современных моделях никого не удивишь множеством датчиков: давления, силы притяжения, магнитного, акселерометра, гироскопа и других. Одними из самых первых датчиков были датчик приближения, света и акселерометр (G-сенсор). Хотя гироскоп в планшете появился значительно позже, его часто путают с G-датчиком. Сами модули на самом деле очень разные, но часто используются в паре. Правда, Apple первая полностью отказалась от использования акселерометра ещё в iPhone 4.

Тем не менее, все остальные производители стараются использовать полезные функции от обоих модулей.
Чем отличается гироскоп от G-сенсора (акселерометра)
G-сенсор, он же акселерометр – предназначен для измерения проекции кажущегося ускорения, то есть для измерения угла наклона девайса сравнительно с поверхностью планеты. В большинстве случаев используется для автоматического поворачивания дисплея планшета (или другого устройства). Впрочем, это и было его первое предназначение. Уже намного позже функциональность G-сенсоров начали использовать для игр и приложений.

Гиродатчик, он же гироскоп – устройство в девайсах, использующееся для определения ориентации планшета и других устройств в пространстве, а также для отслеживания его перемещения. Впервые начал использоваться в ноутбуках для защиты жёсткого диска от последствий падения устройства или его резкого перемещения.
Что такое гироскоп в планшете и где он используется?
Итак, что такое гироскоп в планшете, для чего он конкретно нужен и какую конкретную выгоду можно от него иметь? Гироскоп – это небольшое устройство с виду похожее на микросхему, но на самом деле являющееся полноценным модулем. Кроме стандартных задач он используется очень часто в современных играх. Например, гонки обрели совершенно новое значение, когда сам планшет выступает в качестве руля. При этом угол наклона соответствует уровню поворота рулевого колеса (Real Racing 3, например).

Стандартное использования модуля
Кроме поворота экрана (в iPad, в других случаях это делается посредством акселерометра) и функций безопасности, на модуль возложены функции расширения вида приложений (интерфейса). Например, калькулятор при повороте дисплея меняет вид с обычного на инженерный. Похожими функциями обладают и другие приложения.
Очень часто разработчики программного обеспечения для устройств используют его для управления устройством. Разнообразные встряхивания, определённая последовательность движений и прочее. С помощью движений можно принимать-завершать звонки, увеличивать-уменьшать громкость и прочее.
Применение в быту

Гиродатчик в планшете – что это и как его использовать в бытовых целях? Функции модуля можно очень широко использовать в домашнем строительстве, ремонте и прочих мелких бытовых задачах. Самое первое и полезное – полноценная замена строительного уровня. Так, например, уровень может выйти из строя, а в гироскопе это исключено. На практике можно использовать для того, чтобы точно выставить мебель или установить окна и двери.
Самое интересное, что можно выставить не только по уровню, а и под совершенно точным углом. Для этого, правда, придётся скачать специальное приложение.

Использование с другими модулями
Очень часто гироскоп используется в паре с другими модулями, в первую очередь с акселерометром. Очень яркий пример – совместное использование с GPS-модулем для навигации. Так, на планшете карта будет автоматически поворачиваться по ходу разворота устройства. Это очень полезно для точной ориентации в пространстве, как на автомобиле, так и, например, для туристов.
Недостатки гироскопа в планшетах
Недостаток заключается как раз в автоматическом повороте экрана. Очень часто пользователей раздражает эта функция, когда она не нужна. Например, поворот экрана при чтении книги или просмотре фильма. Именно поэтому функцию автоматического поворота экрана отключают, предпочитая постоянную ориентацию.
Что такое гироскоп в планшете: Видео
Дата публикации: 24.10.13
Поблагодарить просто – нажмите по любой из кнопок соцсетей
Добавить комментарий
kingdia.com
Гироскопический датчик угловой скорости — КиберПедия
В основе датчика угловой скорости ДУСа лежит двухстепенной гироскоп. Двухстепенной гироскоп имеет одну раму подвеса ротора и обладает двумя степенями свободы: относительно оси xx собственного вращения и оси уу рамы.
Рис. гироскоп с двумя степенями свободы.
Свойство гироскопа с двумя степенями свободы заключается в том, что если к гироскопу приложить силу Р, создающую момент внешней силы Мвн вокруг оси уу, то прецессионного движения не возникает а гироскоп поворачивается вокруг оси уу как обычное негироскопическое тело. При этом возникает гироскопический момент, действующий относительно мнимой оси zz, который уравновешивается реакцией опор рамки.
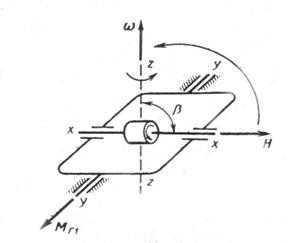
Рис. Прецессия гироскопа с двумя степенями свободы
Если же гироскоп поворачивать вокруг мнимой оси zz, то главная ось гироскопа хх прецессирует вокруг оси уу до совмещения по кратчайшему пути вектора кинетического момента Н ротора гироскопа с вектором угловой скорости ω вынужденного вращения.
Прецессия возникает вследствие гироскопического момента Мг1 , величина которого определяется из выражений:
Мг1=Hωsinβ или Mг1=Hωcos α
где H – кинетический момент ротора гироскопа; Н = IΩ, I – момент инерции ротора; Ω – угловая скорость вращения ротора; ω – угловая скорость вынужденного вращения гироскопа; β – угол между осями хх и уу гироскопа; α – угол между исходным положением оси хх и текущим.
Прецессия происходит с ускорением
где Iу – момент инерции гироскопа вокруг оси уу.
Для измерения угловых ускорений используется схема, представленная на рисунке.
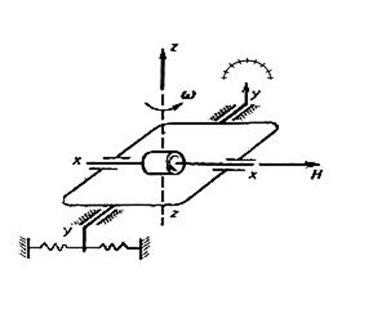
Рис. Схема ДУС
Таким образом, при всякой попытке сообщить гироскопу угловую скорость вокруг оси Z-Z он реагирует угловым отклонением относительно оси у-у. После окончания действия угловой скорости гироскоп приходит в исходное положение.
В том случае, если вектор Н трехстепенного гироскопа развернут параллельно плоскости земли, то из него получается гироазимут. В том случае, если центр тяжести трехстепенного гироскопа сместить ниже точки подвеса, то мы получим
простейший гирокомпас. Указанный груз создает дополнительный момент, который под воздействием угловой скорости суточного вращения земли приводит вектор Н в меридиан. Гирокомпас, в отличии от магнитного компаса, не подвержен магнитным возмущениям, однако он не работает в высоких широтах, т.к. величина вектора угловой скорости вращения земли там мала. Гирокомпас нельзя установить на самолете, т.к. он перемещается со скоростью большей, чем угловая скорость вращения земли. Для этих целей используют гироазимуты, в конструкцию которых вводят широтную коррекцию.
Электростатические датчики скорости
используют зависимость зарядного тока конденсатора I от источника напряжения U и скорости V, изменения его емкости —
I = KUV.
Здесь K — конструктивный коэффициент.
Если между обкладками конденсатора размещен электрет (диэлектрик с постоянной поляризацией), то датчик может работать без внешнего источника напряжения. Погрешность датчика зависит от стабильности источника напряжения, термозависимости диэлектрика. Для преобразования аналогового выходного сигнала в ДЦК применяют АЦП.
Измерение скорости производится также традиционно при помощи электромашинных тахогенераторов.
Тахогенера́тор (от греч. táchos — быстрота, скорость и генератор) — измерительный генератор постоянного или переменного напряжения, предназначенный для преобразования мгновенного значения частоты вращения вала в электрический сигнал.
Величина сигнала (ЭДС) прямо пропорциональна частоте вращения. Различают тахогенераторы переменного тока (синхронные и асинхронные) и постоянного тока.
Тахогенераторы постоянного тока являются коллекторными машинами с постоянным возбуждением и выходной характеристикой
 Погрешность преобразования зависит от насыщения магнитопровода, падения напряжения на щетках, величины реакции якоря, сопротивления якорной цепи. Статическая характеристика тахогенератора постоянного тока приведена на рис. 72.
Погрешность преобразования зависит от насыщения магнитопровода, падения напряжения на щетках, величины реакции якоря, сопротивления якорной цепи. Статическая характеристика тахогенератора постоянного тока приведена на рис. 72.
Ввод сигнала тахогенератора постоянного тока в контроллер реализуется через АЦП.
Тахогенераторы переменного тока синхронные являются синхронными машинами с выходной характеристикой
U(t) = A(ro)sin(rot),
где ю — частота вращения якоря; А(ю) — амплитуда сигнала, зависящая от частоты. Обычно в таких тахогенераторах ротором служит явнополюсный постоянный магнит, а сигнал снимается с обмоток статора.
Основное достоинство синхронных тахогенераторов: простота конструкции и высокая надежность в работе.
Главный недостаток синхронных тахогенераторов заключается в том, что одновременно с изменением угловой скорости вращения ротора ю изменяются частота тока в статоре и индуктивное сопротивление как самого та- хогенератора, так и нагрузки, на которую он работает. Это приводит к искажению выходной характеристики датчика скорости, к появлению значительных амплитудных и фазовых погрешностей, что является существенным недостатком.
Для ввода сигнала синхронного тахогенератора требуется фазовый детектор, фильтр, масштабирующий элемент, АЦП.
Асинхронные тахогенераторы переменного тока являются асинхронными машинами с разомкнутым якорем и с квазилинейной выходной характеристикой
.
Асинхронный тахогенератор (рис.) ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором – одна обмотка статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), а с другой – генераторной обмотки (ГО) снимается выходное напряжение.

Рис. Асинхронный тахогенератор
При питании обмотки возбуждения переменным током частоты fВ возникает пульсирующий магнитный поток ФВ, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС – ЕТ (показана внутри ротора) и ЭДС вращения – ЕВР (показана снаружи ротора). В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток ФТР, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку ФТР, он не будет индуцировать в ней никакой ЭДС.
Погрешность преобразования зависит от насыщения магнитопровода, величины реакции якоря, сопротивления якорной цепи, стабильности цепи возбуждения. Для снижения величины пульсаций применяют многофазные обмотки.
Для ввода сигнала асинхронного тахогенератора требуется фазовый детектор, фильтр, масштабирующий элемент, АЦП.
Тахогенераторы являются, как правило, автономными или встраиваемыми типовыми элементами.
Параметры выбора тахогенераторов: диапазон измерений; линейность статической характеристики, %; статический коэффициент усиления, В с/рад; электромагнитная постоянная времени, с; погрешность амплитуды выходного сигнала, %; погрешность фазы выходного сигнала, %; смещение «Нуля», В; тип энергопитания; уровень радиопомех; уровень шумов; момент инерции ротора, кгм2; момент трогания, Нм; тип выходного сигнала; уровень напряжения выходного сигнала, В; выходное сопротивление; ОТП.
Эстиматоры скорости. Эстиматорами скорости называют технические средства, позволяющие оценить скорость некоторого объекта путем измерения интервала времени между двумя событиями на его пути. В частности, источником импульсов может является импульсный датчик перемещений и т. п.
Датчикитока
Датчики тока предназначены для измерения и контроля постоянным, переменным и импульсным токами и широко применяются в электротехнике для создания систем обратной связи.
В зависимости от принципа работы датчики тока подразделяются на резистивные, токовые трансформаторы и датчики на эффекте Холла.
Измерительные трансформаторы тока предназначены для преобразования тока до значения, удобного для измерения.
Первичная обмотка трансформатора тока включается последовательно в цепь с измеряемым переменным током, а во вторичную включаются измерительные приборы. Ток, протекающий по вторичной обмотке трансформатора тока, пропорционален току, протекающему в его первичной обмотке. Трансформаторы тока обеспечивают безопасность измерений, изолируя измерительные цепи от первичной цепи с высоким напряжением, часто составляющим сотни киловольт.
Основным недостатком является инертность, которая затрудняет измерение мгновенных значений несинусоидального тока.
Трансформатор тока имеет замкнутый магнитопровод 2 (рис.18) и две обмотки — первичную 1 и вторичную 3. Первичная обмотка включается последовательно в цепь измеряемого тока I1, ко вторичной обмотке присоединяются измерительные приборы, обтекаемые током I2.
Рис.18. Трансформаторы тока
а – одновитковый трансформатор тока; б – многовитковый трансформатор тока; в – многовитковый трансформатор тока с двумя сердечниками; 1 – первичная обмотка; 2 – вторичная обмотка; 3 – сердечник; 4 – изоляция; 5 – обмотка прибора
cyberpedia.su