
К зачету физика 10-1
10 класс
Материалы к зачету по теме “Основные законы механики “
1. Механическое движение.
Явление механического движения тел (материальных точек)состоит в том, что положение тела относительно других тел, т. е. его координаты, с течением времени изменяется.Чтобы найти координаты тела в любой момент времени, нужно знать начальные координаты и вектор перемещения тела. Изменение координаты тела равно проекции вектора перемещения на соответствующую ось координат.
Прямолинейное равномерное движение — это самый простой вид движения.При таком движении нужно определять лишь одну координату потому, что координатную ось можно направить вдоль направления движения тела. Координату х тела (материальной точки) в любой момент времени t можно вычислить по формуле:
где — начальная координата тела, а — проекция вектора его скорости на ось х. При вычислениях по этой формуле знаки входящих в нее величин определяются условием задачи.
Механическое движение относительно. Это значит, что перемещение и скорость тела относительно различных систем координат, движущихся друг относительно друга, различны.
Покой также относителен. Если относительно какой-то системы координат тело покоится, то существуют и такие системы отсчета, относительно которых оно движется.
2. Основная задача механики
чтобы найти координату точки, нужно знать ее перемещение, а чтобы вычислить перемещение, нужно знать скорость движения.
По такой цепочке: скорость → перемещение → координата решают задачи механики для прямолинейного равномерного движения.
Если движение ускоренное, то нужно знать ускорение, так что при таком движении задачи решают по «цепочке» ускорение → скорость → перемещение → координата. И для равномерного, и для ускоренного движения должны быть известны начальные условия —
При прямолинейном ускоренном движении мгновенная скорость тела (материальной точки) непрерывно изменяется от одного момента времени к другому. Поэтому для вычисления скорости в любой момент времени и в любой точке нужно знать быстроту ее изменения, т.е. ускорение:
.
Проекцию скорости тела на выбранную координатную ось в любой момент времени t вычисляют по формуле:
.
Координату тела
.
Проекцию перемещения находят по формуле:
.
Из приведенных формул получаются формулы для скорости, координат и перемещений при равномерном прямолинейном движении, если принять, что а x = 0.
Значение проекции перемещения при равноускоренном движении можно определить также по формуле:
.
| Так как | , то для координаты тела х имеем: |
При вычислениях по приведенным формулам знаки проекций векторов , а также знак начальной координаты х, определяются условием задачи и направлением оси координат.
3. При криволинейном движении непрерывно изменяется направление вектора скорости, и в каждой точке траектории он направлен по касательной к траектории в данной точке. Поэтому даже равномерное движение по криволинейной траектории, при котором значение модуля скорости постоянно, есть ускоренное движение
Связь между линейной и угловой скоростью выражается формулой:
,
где r — радиус окружности.
При равномерном движении по окружности вектор ускорения в любой точке окружности перпендикулярен вектору скорости и направлен к центру окружности. Модуль вектора центростремительного ускорения выражается равенством:
.
Относительно вращающегося стержня (оси) не закрепленное на нем тело (точка) движется вдоль стержня по направлению от оси вращения.
Пример решения задачи:
1. Ширина реки 200 м. Лодка, держа курс перпендикулярно течению реки, достигла противоположного берега за 140 с. Скорость течения воды в реке 0,8 м/с. Определите скорость и перемещение лодки относительно берега.
Ответ: Скорость лодки относительно берега 1,6 м/с, перемещение 112 м.
1. Через реку переправляется лодка, выдерживая курс перпендикулярно течению. Скорость лодки
4 м/с, скорость течения реки 3 м/с. Какова ширина реки, если лодку снесло на 60 м?
2. 9 км/ч = … м/с; 10 м/с = … км/ч; 8 км/с = … км/ч, 54 км/ч = …м/с.
3. Автомобиль движется: а) с постоянной скоростью; б) с постоянным ускорением;
в) с положительным ускорением; г) с отрицательным ускорением.
Назовите вид каждого движения и изобразите соответствующие графики скорости.
Попробуйте решить задачи из раздела “Кинематика”
вернуться на страницу “Физика” |
вверх |
osiktakan.ru
физика ответы
Меха́ника (греч. μηχανική —
искусство построения машин) —
раздел физики,
наука,
изучающая движение материальных тел и взаимодействие между
ними; при этом движением в механике
называют изменение во времени взаимного
положения тел или их частей в пространстве
Механика занимается изучением так называемых механических систем.
Механическая система обладает определённым числом степеней свободы, а её состояние описывается с помощью обобщённых координат и соответствующих им обобщённых импульсов . Задача механики состоит в изучении свойств механических систем, и, в частности, в выяснении их эволюции во времени.
степени свободы — это совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела (а вместе с их производными по времени — соответствующими скоростями – полностью определяющая состояние механической системы или тела – то есть их положение и движение).
Материа́льная то́чка (частица) — простейшая физическая модель в механике — обладающее массой тело, размерами, формой, вращением и внутренней структурой которого можно пренебречь в условиях исследуемой задачи.
Траекто́рия материа́льной то́чки — линия в пространстве, вдоль которой движется тело, представляющая собой множество точек, в которых находилась, находится или будет находиться материальная точка при своём перемещении в пространстве относительно выбранной системы отсчёта
Перемеще́ние (в кинематике) — изменение местоположения физического тела в пространстве относительно выбранной системы отсчёта. Также перемещением
Можно определить перемещение, как изменение радиус-вектора точки: .
Модуль перемещения совпадает с пройденным путём в том и только в том случае, если при движении направление скорости не изменяется. При этом траекторией будет отрезок прямой. В любом другом случае, например, при криволинейном движении, из неравенства треугольника следует, что путь строго больше.
Путь — длина участка траектории материальной точки
Система
отсчёта —
это совокупность тела
отсчёта,
связанной с ним системы
координат и
системы отсчёта времени,
по отношению к которым рассматривается
движение (или равновесие)
каких-либо материальных
точек или
тел
Математически движение тела (или материальной точки) по отношению к выбранной системе отсчёта описывается уравнениями, которые устанавливают, как изменяются с течением времени t координаты, определяющие положение тела (точки) в этой системе отсчёта. Эти уравнения называются уравнениями движения. Например, в декартовых координатах х, y, z движение точки определяется уравнениями , , .
Система координат — комплекс определений, реализующий метод координат, то есть способ определять положение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки.
Декартовы координаты
Расположение точки P на плоскости определяется декартовыми координатами с помощью пары чисел
В пространстве необходимо уже 3 координаты
— расстояние от точки P до плоскости yz
— расстояние от точки P до плоскости xz
— расстояние от точки P до плоскости xy
Полярные координаты

Полярные координаты.
В полярной системе координат, применяемой на плоскости, положение точки P определяется её расстоянием до начала координат r = |OP| и углом φ её радиус-вектора к оси OX.
В пространстве применяются обобщения полярных координат — цилиндрические и сферические системы координат.
Цилиндрические координаты
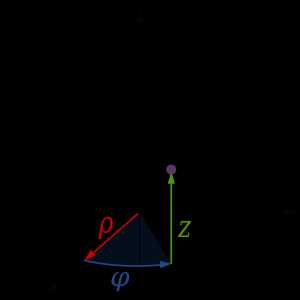
Цилиндрические координаты.
Цилиндрические координаты — трёхмерный аналог полярных, в котором точка P представляется упорядоченной тройкой В терминах декартовой системы координат,
(радиус) — расстояние от оси z до точки P,
(азимут или долгота) — угол между положительной («плюсовой») частью оси x и отрезком, проведённым от полюса до точки P и спроектированной на плоскость xy.
(высота) равна декартовой z-координате точки P.
Примечание: в литературе для первой (радиальной) координаты иногда используется обозначение ρ, для второй (угловой, или азимутальной) — обозначениеθ, для третьей координаты — обозначение h.
Полярные координаты имеют один недостаток: значение φ не определено при r = 0.
Цилиндрические координаты полезны для изучения систем, симметричных относительно некоторой оси. Например, длинный цилиндр с радиусом R в декартовых координатах (с осью z, совпадающей с осью цилиндра) имеет уравнение тогда как в цилиндрических координатах оно выглядит гораздо проще, какr = R.
Сферические координаты
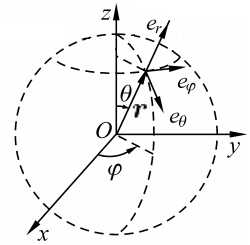
Сферические координаты.
Сферические координаты — трёхмерный аналог полярных.
В сферической системе координат расположение точки P определяется тремя компонентами: В терминах декартовой системы координат,
(радиус) — расстояние от точки P до полюса,
(азимут или долгота) — угол между положительной («плюсовой») полуосью x и проекцией отрезка, проведённого из полюса до точки P, на плоскость xy.
(широта или полярный угол) — угол между положительной («плюсовой») полуосью z и отрезком, проведённым из полюса до точки P.
Примечание: в литературе иногда азимут обозначается θ, а полярный угол – φ. Иногда для радиальной координаты используется r вместо ρ. Кроме того, диапазон углов для азимута может выбираться как (−180°, +180°] вместо диапазона [0°, +360°). Наконец, полярный угол может отсчитываться не от положительного направления оси z, а от плоскости xy; в этом случае он лежит в диапазоне [−90°, +90°], а не в диапазоне [0°, 180°]. Иногда порядок координат в тройке выбирается отличным от описанного; например, полярный и азимутальный углы могут быть переставлены.
Сферическая система координат также имеет недостаток: φ и θ не определены, если ρ = 0; угол φ не определён также и для граничных значений θ = 0 и θ = 180° (или для θ = ±90°, в случае принятия соответствующего диапазона для этого угла).
Для построения точки P по её сферическим координатам нужно от полюса вдоль положительной полуоси z отложить отрезок, равный ρ, повернуть его на угол θ вокруг оси y в направлении положительной полуоси x, и затем повернуть на угол θ вокруг оси z в направлении положительной полуоси y.
Сферические координаты полезны при изучении систем, симметричных относительно точки. Так, уравнение сферы с радиусом R в декартовых координатах с началом отсчёта в центре сферы выглядит как тогда как в сферических координатах оно становится намного проще:
Скорость – векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта; по определению, равна производной радиус-вектора точки по времени. Этим же словом называют и скалярную величину — либо модуль вектора скорости, либо алгебраическую скорость точки, т. е. проекцию этого вектора на касательную к траектории точки.
Равномерное движение: ν = const
Равнопеременное движение:
Криволинейное движение:
Вращательное движение:
Ускоре́ние (обычно обозначается латинскими буквами a (от лат. acceleratio) или w) — физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. Ускорение является векторной величиной, показывающей, на сколько изменяется вектор скорости тела при его движении за единицу времени
Тангенциа́льное ускоре́ние — компонента ускорения, направленная по касательной к траектории движения.
Центростремительное (НОРМАЛЬНОЕ) ускорение — компонента ускорения точки, характеризующая быстроту изменения направления вектора скорости для траектории с кривизной. Направлено к центру кривизны траектории.
Враща́тельное движе́ние — вид механического движения. При вращательном движении материальной точки она описывает окружность. При вращательном движении абсолютно твёрдого телавсе его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной.
Кинематические характеристики
Вращение характеризуется углом , измеряющимся вградусах или радианах, угловой скоростью (измеряется в рад/с) иугловым ускорением (единица измерения — рад/с²).
При равномерном вращении (T — период вращения),
Частота вращения (угловая частота) — число оборотов в единицу времени.
,
Период вращения — время одного полного оборота. Период вращения и его частотасвязаны соотношением.
Линейная скорость точки, находящейся на расстоянии R от оси вращения
,
Угловая скорость вращения тела — векторная величина.
.
Динамические характеристики[править | править вики-текст]
Свойства твердого тела при его вращении описываются моментом инерции твёрдого тела. Эта характеристика входит в дифференциальные уравнения, полученные из уравнений Гамильтона или Лагранжа. Кинетическую энергию вращения можно записать в виде:
.
В этой формуле момент инерции играет роль массы, а угловая скорость — роль скорости. Момент инерции выражает геометрическое распределение массы в теле и может быть найден из формулы .
Момент инерции механической системы относительно неподвижной оси a («осевой момент инерции») — физическая величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
,
где: mi — масса i-й точки, ri — расстояние от i-й точки до оси.
система | ось | Момент инерции |
Точка по окружности | Ось симметрии | mR2 |
Стержень | Через середину | 1/12mR2 |
Стержень | Через конец | 1/3mR2 |
Шар | Через центр шара | 2/5mR2 |
Сфера | Через центр сферы | 2/3mR2 |
Кольцо или тонкостенный цилиндр | Ось симметрии | mR2 |
Диск, сплошной цилиндр | Ось симметрии | 1/2mR2 |
Инерция — это свойство тела сохранять свою скорость движения неизменной (и по величине, и по направлению), когда на тело не действуют никакие силы. Чтобы изменить скорость движения тела, на него необходимо подействовать с некоторой силой. Естественно, результат действия одинаковых по величине сил на различные тела будет различным. Таким образом, говорят, что тела обладают разной инертностью. Инертность — это свойство тел сопротивляться изменению их скорости. Величина инертности характеризуется массой тела.
Первый закон Ньютона
Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальные точки, когда на них не действуют никакие силы (или действуют силы взаимно уравновешенные), находятся в состоянии покоя или равномерного прямолинейного движения. |
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО).
Масса материальной точки при этом полагается величиной постоянной во времени и независящей от каких-либо особенностей её движения и взаимодействия с другими телами[4][5][6][7].
В инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе. |
При подходящем выборе единиц измерения, этот закон можно записать в виде формулы:
где — ускорение материальной точки; — равнодействующая всех сил, приложенных к материальной точке; — масса материальной точки.
Второй закон Ньютона может быть также сформулирован в эквивалентной форме с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной точки равна равнодействующей всех приложенных к ней внешних сил. |
где — импульс точки, — её скорость, а — время. При такой формулировке, как и при предшествующей, полагают, что масса материальной точки неизменна во времени
Третий закон Ньютона
Этот закон описывает, как взаимодействуют две материальные точки. Возьмём для примера замкнутую систему, состоящую из двух материальных точек. Первая точка может действовать на вторую с некоторой силой , а вторая — на первую с силой . Как соотносятся силы? Третий закон Ньютона утверждает: сила действия равна по модулю и противоположна по направлению силе противодействия .
Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению: |
Закон утверждает, что силы возникают лишь попарно, причём любая сила, действующая на тело, имеет источник происхождения в виде другого тела. Иначе говоря, сила всегда есть результат взаимодействия тел. Существование сил, возникших самостоятельно, без взаимодействующих тел, невозможно
И́мпульс (Коли́чество движе́ния) — векторная физическая величина, являющаяся мерой механического движения тела. В классической механике импульс тела равен произведению массы m этого тела на его скорость v, направление импульса совпадает с направлением вектора скорости:
.
Работа – физическая величина, равная произведению силы, действующей на тело, на путь, совершенный телом под действием силы в направлении этой силы.
Работа силы тяжести:
Работа упругой силы пружины:
Кинетическая энергия — энергия механической системы, зависящая от скоростей движения её точек. Часто выделяют кинетическую энергию поступательного и вращательногодвижения. Единица измерения в СИ — Джоуль. Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением.
Если система замкнута, то есть внешние по отношению к системе силы отсутствуют, или равнодействующая всех сил равна нулю, то , а величина
остаётся постоянной. Эта величина называется кинетической энергией частицы. Если система изолирована, то кинетическая энергия является интегралом движения.
Для абсолютно твёрдого тела полную кинетическую энергию можно записать в виде суммы кинетической энергии поступательного и вращательного движения:
где:
— масса тела
— скорость центра масс тела
— момент инерции тела
— угловая скорость тела.
Физический смысл работы
Работа всех сил, действующих на частицу при её перемещении, идёт на приращение кинетической энергии частицы[4]:
Потенциальная энергия — скалярная физическая величина, характеризует запас энергии некоего тела (или материальной точки), находящегося в потенциальном силовом поле, который идет на приобретение (изменение) кинетической энергии тела за счет работы сил поля. Другое определение: потенциальная энергия — это функция координат, являющаяся слагаемым в лагранжиане системы, и описывающая взаимодействие элементов системы[5].
Потенциальная энергия тела в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
где — масса тела, — ускорение свободного падения, — высота положения центра масс тела над произвольно выбранным нулевым уровнем.
Потенциальная энергия растянутой пружины
Основной закон вращательного движения:
(Момент силы, действующий на вращающееся тело, равен произведению момента инерции тела на угловое ускорение )
Закон сохранения момента импульса
Изменение момента импульса вращающихся тел в замкнутой системе равен нулю, то есть или », где – векторная сумма моментов импульса тел до взаимодействия; – векторная сумма моментов импульса тел после взаимодействия
Кинетическая энергия вращающегося тела
Поступательно движущееся тело обладает кинетической энергиейгде m – масса тела или мера инертности поступательно движущегося тела, – квадрат его линейной скорости.
Движение вращающегося тела характеризуется угловой скоростью , а мерой его инертности является момент инерции J. Связь линейной и угловой скоростей . Записав формулу для i-й точки, вращающейся вокруг оси ОО, получим
, где – момент инерции всех точек тела.
Следовательно,
,
то есть кинетическая энергия вращающегося тела равна той работе, которую может совершить это тело до полной остановки.
Работа.Вращательное движение обеспечивается приложенным к телу вращательным моментом относительно оси, который создается парой сил Р’,Р (рис. 4) и определяется по формуле:
При повороте тела на угол ф, работа А совершается силой Р, перемещенной из точки C1 в точку С2. Полное перемещение точки приложения силы S равно длине дуги радиусом R, т.е.
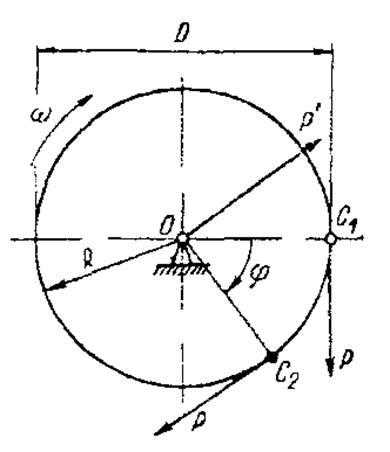
Поскольку сила Р всегда направлена по касательной к перемещению S, то совершаемая работа будет:
Сила Р’, приложенная в неподвижной точке О работы не совершает.
Учитывая, что
Работа постоянной силы, приложенной к вращающемуся телу, равна произведению вращающего момента на угол поворота.
Сохранения механической энергии
Полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остаётся постоянной.
studfiles.net
Скорости и ускорения как производные координаты
Зная координату тела (закон, по которому она изменяется) можно очень многое о движении этого тела узнать. Например, скорость – первая производная от координаты. А ускорение – вторая производная, или первая производная скорости. Если в задаче дано еще и время движения тела – то можно полностью описать движение и найти все его характеристики для данного момента времени.

Ускорение
Задача 1. Точка движется по прямой согласно закону , где м/с, м/c. Определить: среднюю скорость точки в интервале времени от с до с, координату точки в тот момент времени, когда скорость тела будет равна нулю.
Средняя скорость – это отношение пройденного пути ко времени. Время движения очевидно: с. А путь можно определить как :
Чтобы определить скорость, возьмем производную координаты по времени:
Если скорость равна 0, то
Откуда с и м.
Ответ: м/с, м.
Задача 2. Точка движется вдоль оси по закону . Найти направление движения в моменты времени: а) с; б) с. Чему будут равны ускорения в эти моменты времени?
Чтобы определить направление движения, нам надо узнать знак скорости в данные моменты времени. Определим сначала скорость тела как производную координаты:
Тогда
Поэтому в момент времени тело движется в положительном направлении, а в момент времени – в отрицательном.
Определим ускорение как вторую производную от координаты, или первую производную скорости по времени:
Ответ: м/с, движение по оси, м/с, м/с, движение против оси, м/с.
Задача 3. Тело движется прямолинейно, причем скорость зависит от времени по закону: . Определить зависимость ускорения от времени . Каково значение ускорения при с?
Чтобы найти ускорение, возьмем производную скорости:
При имеем:
Ответ: , м/с.
easy-physic.ru
Координатный метод в стереометрии | Все формулы
Координатный метод в стереометрии
1) Координаты вектора определяются через координаты начала и конца вектора
Координаты начала вектора , координаты конца вектора . Координаты вектора 2) Угол между векторами и определяется с помощью формулы скалярного произведения: Угол между прямыми, содержащими векторы 3) Положение плоскости в пространстве характеризуется вектором-нормалью к плоскости. Если известны три точки плоскости , то по ним можно определить координаты нормали Для этого необходимо решить систему уравнений, где вместо одной из переменных (обычно D) берут любое число, не равное 0. Уравнение плоскости задается уравнением4) Расстояние от точки до плоскости
Расстояние от точки с координатами до плоскости с нормалью определяется по формуле 5) Угол между плоскостями равен углу между нормалями к плоскостям:Угол между плоскостями по определению меньше 90 градусов, это обеспечивается положительным значением косинуса в формуле.
6) Угол между прямой и плоскостью определяется с помощью вектора , лежащего на прямой и нормалью к плоскости: 7) Площадь ортогональной проекции многоугольника , где — площадь проекции многоугольника, — площадь многоугольника, — косинус угла между плоскостью многоугольника и плоскостью проекции. Площадь многоугольника находится по площади его проекции8) Уравнение прямой в пространстве
Если прямая параллельна вектору и проходит через точку , то уравнение прямой задается формулойxn--b1agsdjmeuf9e.xn--p1ai
Равноускоренное движение – материалы для подготовки к ЕГЭ по Физике
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: виды механического движения, скорость, ускорение, уравнения прямолинейного равноускоренного движения, свободное падение.
Равноускоренное движение – это движение с постоянным вектором ускорения . Таким образом, при равноускоренном движении остаются неизменными направление и абсолютная величина ускорения.
Зависимость скорости от времени.
При изучении равномерного прямолинейного движения вопрос зависимости скорости от времени не возникал: скорость была постоянна в процессе движения. Однако при равноускоренном движении скорость меняется с течением времени, и эту зависимость нам предстоит выяснить.
Давайте ещё раз потренируемся в элементарном интегрировании. Исходим из того, что производная вектора скорости есть вектор ускорения:
. (1)
В нашем случае имеем . Что надо продифференцировать, чтобы получить постоянный вектор ? Разумеется, функцию . Но не только: к ней можно добавить ещё произвольный постоянный вектор (ведь производная постоянного вектора равна нулю). Таким образом,
. (2)
Каков смысл константы ? В начальный момент времени скорость равна своему начальному значению: . Поэтому, полагая в формуле (2), получим:
.
Итак, константа – это начальная скорость тела. Теперь соотношение (2) принимает свой окончательный вид:
. (3)
В конкретных задачах мы выбираем систему координат и переходим к проекциям на координатные оси. Часто хватает двух осей и прямоугольной декартовой системы координат, и векторная формула (3) даёт два скалярных равенства:
, (4)
. (5)
Формула для третьей компоненты скорости, если она необходима, выглядит аналогично.)
Закон движения.
Теперь мы можем найти закон движения, то есть зависимость радиус-вектора от времени. Вспоминаем, что производная радиус-вектора есть скорость тела:
Подставляем сюда выражение для скорости, даваемое формулой (3):
(6)
Сейчас нам предстоит проинтегрировать равенство (6). Это несложно. Чтобы получить , надо продифференцировать функцию . Чтобы получить , нужно продифференцировать . Не забудем добавить и произвольную константу :
.
Ясно, что – это начальное значение радиус-вектора в момент времени . В результате получаем искомый закон равноускоренного движения:
. (7)
Переходя к проекциям на координатные оси, вместо одного векторного равенства (7) получаем три скалярных равенства:
. (8)
. (9)
. (10)
Формулы (8) – (10) дают зависимость координат тела от времени и поэтому служат решением основной задачи механики для равноускоренного движения.
Снова вернёмся к закону движения (7). Заметим, что – перемещение тела. Тогда
получаем зависимость перемещения от времени:
.
Прямолинейное равноускоренное движение.
Если равноускоренное движение является прямолинейным, то удобно выбрать координатную ось вдоль прямой, по которой движется тело. Пусть, например, это будет ось . Тогда для решения задач нам достаточно будет трёх формул:
,
,
,
где – проекция перемещения на ось .
Но очень часто помогает ещё одна формула, являющаяся их следствием. Выразим из первой формулы время:
и подставим в формулу для перемещения:
.
После алгебраических преобразований (проделайте их обязательно!) придём к соотношению:
.
Эта формула не содержит времени и позволяет быстрее приходить к ответу в тех задачах, где время не фигурирует.
Свободное падение.
Важным частным случаем равноускоренного движения является свободное падение. Так называется движение тела вблизи поверхности Земли без учёта сопротивления воздуха.
Свободное падение тела, независимо от его массы, происходит с постоянным ускорением свободного падения , направленным вертикально вниз. Почти во всех задачах при расчётах полагают м/с.
Давайте разберём несколько задач и посмотрим, как работают выведенные нами формулы для равноускоренного движения.
Задача. Найти скорость приземления дождевой капли, если высота тучи км.
Решение. Направим ось вертикально вниз, расположив начало отсчёта в точке отрыва капли. Воспользуемся формулой
.
Имеем: – искомая скорость приземления, . Получаем: , откуда . Вычисляем: м/с. Это 720 км/ч, порядка скорости пули.
На самом деле капли дождя падают со скоростью порядка нескольких метров в секунду. Почему такое расхождение? Сопротивление воздуха!
Задача. Тело брошено вертикально вверх со скоростью м/с. Найти его скорость через c.
Решение. Направим ось вертикально вверх, поместив начало отсчёта на поверхности Земли. Используем формулу
.
Здесь , так что . Вычисляем: м/с. Значит, скорость будет равна 20 м/с. Знак проекции указывает на то, что тело будет лететь вниз.
Задача. С балкона, находящегося на высоте м, бросили вертикально вверх камень со скоростью м/с. Через какое время камень упадёт на землю?
Решение. Направим ось вертикально вверх, поместив начало отсчёта на поверхности Земли. Используем формулу
.
Имеем: так что , или . Решая квадратное уравнение, получим c.
Горизонтальный бросок.
Равноускоренное движение не обязательно является прямолинейным. Рассмотрим движение тела, брошенного горизонтально.
Предположим, что тело брошено горизонтально со скоростью с высоты . Найдём время и дальность полёта, а также выясним, по какой траектории происходит движение.
Выберем систему координат так, как показано на рис. 1.
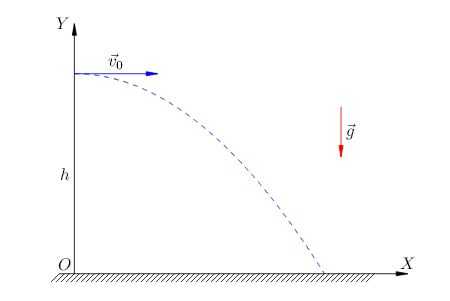 |
| Рис. 1. Горизонтальный бросок |
Используем формулы:
В нашем случае . Получаем:
. (11)
Время полёта найдём из условия, что в момент падения координата тела обращается в нуль:
.
Дальность полёта – это значение координаты в момент времени :
.
Уравнение траектории получим, исключая время из уравнений (11). Выражаем из первого уравнения и подставляем во второе:
.
Получили зависимость от , которая является уравнением параболы. Следовательно, тело летит по параболе.
Бросок под углом к горизонту.
Рассмотрим несколько более сложный случай равноускоренного движения: полёт тела, брошенного под углом к горизонту.
Предположим, что тело брошено с поверхности Земли со скоростью , направленной под углом к горизонту. Найдём время и дальность полёта, а также выясним, по какой траектории двигается тело.
Выберем систему координат так, как показано на рис. 2.
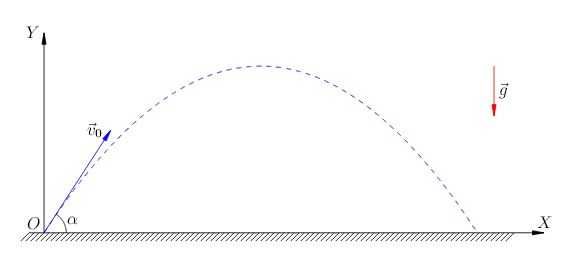 |
| Рис. 2. Бросок под углом к горизонту |
Начинаем с уравнений:
,
.
В нашем случае . Получаем:
.
Дальше действуем так же, как и в случае горизонтального броска. В результате приходим к соотношениям:
,
,
.
(Обязательно проделайте эти вычисления самостоятельно!) Как видим, зависимость от снова является уравнением параболы.Попробуйте также показать, что максимальная высота подъёма определяется формулой:
.
Звоните нам: 8 (800) 775-06-82 (бесплатный звонок по России) +7 (495) 984-09-27 (бесплатный звонок по Москве)
Или нажмите на кнопку «Узнать больше», чтобы заполнить контактную форму. Мы обязательно Вам перезвоним.
ege-study.ru
Формула вершины параболы — Науколандия
Обычно формулу координаты x вершины параболы используют, когда имеют дело с квадратичной функцией.
Квадратичная функция имеет вид: y = ax2 + bx + c.
Ее график — это парабола с вершиной, координаты которой определяются по формулам:
Однако формулу координаты y знать и использовать не обязательно. Обычно проще подставить найденное значение x в саму квадратичную функцию и найти оттуда y.
Например, если дана функция y = 2x2 – 4x + 5, то координата x ее вершины будет равна:
x = –(–4 / (2 × 2)) = 1
Координату же y вычислим, подставив найденный x в саму функцию:
y = 2 × 12 – 4 × 1 + 5 = 3
Таким образом, вершина графика функции y = 2x2 – 4x + 5 находится в точке с координатами (1; 3).
В остальном парабола квадратичной функции вида y = ax2 + bx + c такая же как функции вида y = ax2. Отличие лишь в сдвиге вершины по сравнению с функцией y = ax2. Так в приведенном выше примере (y = 2x2 – 4x + 5) парабола будет по форме и направлению ветвей такой же, как для функции y = 2x2. Разница лишь в координатах вершин парабол.
Формулы вершины параболы получаются при преобразовании квадратичной функции к виду y = f(x + l) + m. Делается это методом выделения полного квадрата. Как известно функции вида y = f(x + l) + m отличаются от функций y = f(x) сдвигом из графиков по оси x на –l и по оси y на m. Именно l в преобразованной квадратичной функции оказывается равным –b/2a, а m = (4ac – b2) / 4a. То есть l и m — это координаты x0 и y0 соответственно.
Доказывается это применением метода выделения полного квадрата к квадратному трехчлену общего вида ax2 + bx + c. При этом выполняются следующие преобразования:
- Объединим первые два члена многочлена: y = (ax2 + bx) + c
- Вынесем коэффициент a за скобку, при этом b разделится на a:
- Представим, что у нас есть квадрат суммы, в котором x одно из слагаемых, а из выражения в скобках надо получить его полный квадрат суммы. Одночлен (b/a)x умножим на 2 и разделим на 2 одновременно. Также прибавим и вычтем квадрат второго слагаемого квадрата суммы. Получим:
- Выделим квадрат суммы:
- Умножим на a:
- Приведем к общему знаменателю свободные члены:
- Поменяем знак:
Таким образом, мы привели функцию y = ax2 + bx + c к виду y = a(x + l)2 + m, что соответствует функции y = f(x + l) + m, где f(x) = ax2. А как строить графики последней известно.
scienceland.info