
6
6. Криволинейное движение. Угловое перемещение, угловые скорость и ускорение тела. Путь и перемещение при криволинейном движении тела.
Криволинейное движение – это движение, траектория которого представляет собой кривую линию (например, окружность, эллипс, гиперболу, параболу). Примером криволинейного движения является движение планет, конца стрелки часов по циферблату и т.д. В общем случае скорость при криволинейном движении изменяется по величине и по направлению.
Криволинейное движение материальной точки считается равномерным движением, если модульскорости постоянен (например, равномерное движение по окружности), и равноускоренным, если модуль и направление скорости изменяется (например, движение тела, брошенного под углом к горизонту).
Рис. 1.19. Траектория и вектор перемещения при криволинейном движении.
При движении по криволинейной траектории вектор перемещения направлен по хорде (рис. 1.19), аl – длина траектории. Мгновенная скорость движения тела (то есть скорость тела в данной точке траектории) направлена по касательной в той точке траектории, где в данный момент находится движущееся тело (рис. 1.20).
Рис. 1.20. Мгновенная скорость при криволинейном движении.
Криволинейное
движение – это всегда ускоренное
движение. То есть ускорение
при криволинейном движении присутствует
всегда, даже если модуль скорости не
изменяется, а изменяется только
направление скорости. Изменение величины
скорости за единицу времени –
это
или
Где vτ, v0 – величины скоростей в момент времени t0 + Δt и t0 соответственно.
Тангенциальное ускорение в данной точке траектории по направлению совпадает с направлением скорости движения тела или противоположно ему.
Нормальное ускорение – это изменение скорости по направлению за единицу времени:
Нормальное ускорение направлено по радиусу кривизны траектории (к оси вращения). Нормальное ускорение перпендикулярно направлению скорости.
Центростремительное ускорение
Полное ускорение при равнопеременном криволинейном движении тела равно:
Движение тела по криволинейной траектории можно приближённо представить как движение по дугам некоторых окружностей (рис. 1.21).
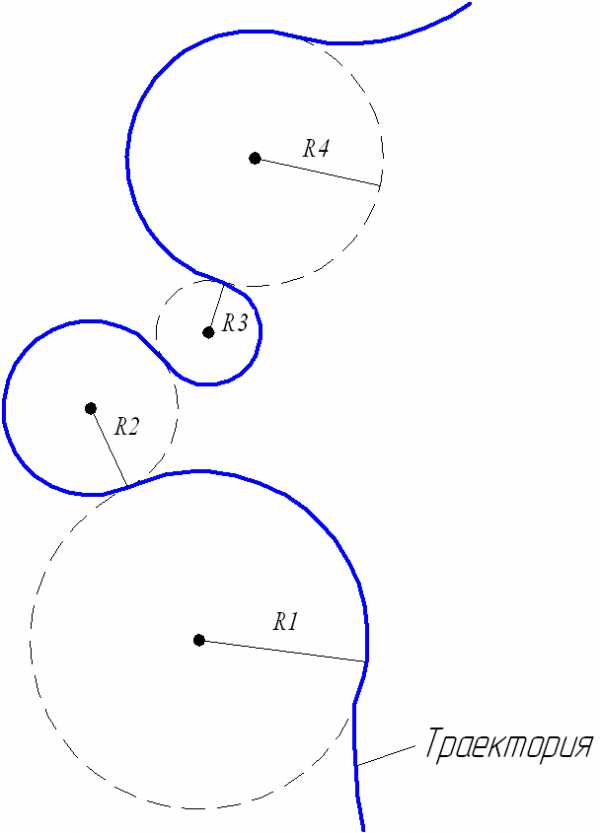 Рис.
1.21. Движение тела при криволинейном
движении.
Рис.
1.21. Движение тела при криволинейном
движении.
ИЛИ
Криволинейное движение
Криволинейные движения – движения, траектории которых представляют собой не прямые, а кривые линии. По криволинейным траекториям движутся планеты, воды рек.
Криволинейное движение – это всегда движение с ускорением, даже если по модулю скорость постоянна. Криволинейное движение с постоянным ускорением всегда происходит в той плоскости, в которой находятся векторы ускорения и начальные скорости точки. В случае криволинейного движения с постоянным ускорением в плоскости xOy проекции vxи vy ее скорости на оси Ox и Oy и координаты x и y точки в любой момент времениt определяется по формулам
Вектор ускорения при движении по окружности направлен к центру окружности и перпендикулярно вектору скорости.
При криволинейном движении ускорение можно представить как сумму нормальной и тангенциальной составляющих:
,
v – мгновенное значение скорости, r – радиус кривизна траектории в данной точке.
– тангенциальное (касательное) ускорение, направлено по касательной к траектории и характеризует изменение скорости по модулю.
Полное ускорение, с которым движется материальная точка, равно:
.
Кроме центростремительного ускорения, важнейшими характеристиками равномерного движения по окружности являются период и частота обращения.
Период обращения— это время, за которое тело совершается один оборот.
Обозначается период буквой Т (с) и определяется по формуле:
где t — время обращения, п — число оборотов, совершенных за это время.
Частота обращения— это величина, численно равная числу оборотов, совершенных за единицу времени.
Обозначается частота греческой буквой (ню) и находится по формуле:
Измеряется частота в 1/с.
Период и частота — величины взаимно обратные:
Если тело, двигаясь по окружности со скоростью v, делает один оборот, то пройденный этим телом путь можно найти, умножив скорость v на время одного оборота:
l = vT. С другой стороны, этот путь равен длине окружности 2πr. Поэтому
vT = 2πr,
где w (с-1) – угловая скорость.
При неизменной частоте обращения центростремительное ускорение прямо пропорционально расстоянию от движущейся частицы до центра вращения.
.
Связь между линейной и угловой скоростями:
v= wr.
Движение тела можно считать известным лишь тогда, когда известно, как движется каждая его точка. Самое простое движение твердых тел – поступательное. Поступательным называется движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается параллельно самой себе.
Криволинейное движение | Физика для всех
Криволинейное движение – это движение, траектория которого представляет собой кривую линию (например, окружность, эллипс, гиперболу, параболу). Примером криволинейного движения является движение планет, конца стрелки часов по циферблату и т.д. В общем случае скорость при криволинейном движении изменяется по величине и по направлению.
Криволинейное движение материальной точки считается равномерным движением, если модуль скорости постоянен (например, равномерное движение по окружности), и равноускоренным, если модуль и направление скорости изменяется (например, движение тела, брошенного под углом к горизонту).
При движении по криволинейной траектории вектор перемещения направлен по хорде (рис. 1.19), а l – длина траектории. Мгновенная скорость движения тела (то есть скорость тела в данной точке траектории) направлена по касательной в той точке траектории, где в данный момент находится движущееся тело (рис. 1.20).
Рис. 1.20. Мгновенная скорость при криволинейном движении.Криволинейное движение – это всегда ускоренное движение. То есть ускорение при криволинейном движении присутствует всегда, даже если модуль скорости не изменяется, а изменяется только направление скорости. Изменение величины скорости за единицу времени – это тангенциальное ускорение:
или
Где vτ, v0 – величины скоростей в момент времени t0 + Δt и t0соответственно.
Тангенциальное ускорение в данной точке траектории по направлению совпадает с направлением скорости движения тела или противоположно ему.
Нормальное ускорение — это изменение скорости по направлению за единицу времени:
Нормальное ускорение направлено по радиусу кривизны траектории (к оси вращения). Нормальное ускорение перпендикулярно направлению скорости.
Центростремительное ускорение – это нормальное ускорение при равномерном движении по окружности.
Полное ускорение при равнопеременном криволинейном движении тела равно:
Движение тела по криволинейной траектории можно приближённо представить как движение по дугам некоторых окружностей (рис. 1.21).
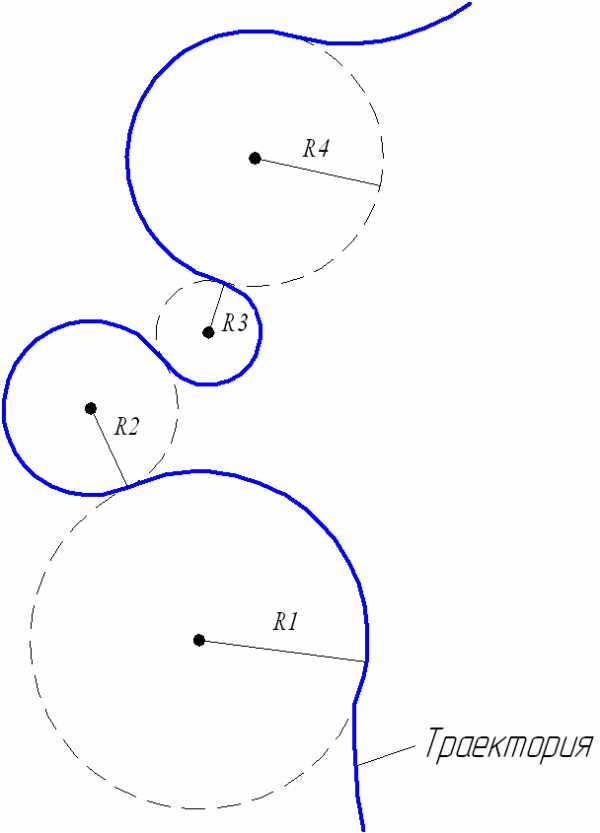 Рис. 1.21. Движение тела при криволинейном движении.
Рис. 1.21. Движение тела при криволинейном движении.av-mag.ru
Лекция 3 Кинематика материальной точки
ПЛАН
1. Прямолинейное движение: равномерное движений, равноускоренное, неравномерное. Кинематические уравнения.
2. Криволинейное движение. Кинематика вращательного движения,
1. – В зависимости от формы траектории движение может быть прямолинейным или криволинейным.
а) Равномерное прямолинейное движение– это такое происходящее по прямолинейной траектории движение, при котором тело (материальная точка) за любые равные промежутки времени совершает одинаковые перемещения (г). Если тело движется по прямой только в одном направлении, модуль его перемещения равен пройденному пути, т.е. |г| = =s. Для того чтобы найти перемещение телаг за промежуток времениt, необходимо знать его скорость V. Скорость равномерного прямолинейного движения равна V=r/t – отношению перемещения тела к промежутку времени, в течение которого было совершено это перемещение. Направление V в прямолинейном движении совпадают с направлениемг, Из определения равномерного прямолинейного движения следует, что скорость такого движения является величиной постоянной, т.е. V = const. По модулю |V| =s /t [1].
Пусть ось ОХ системы координат; связанной с системой отсчета, совпадает с прямой, вдоль которой движется тело, а Хо– координата начальной точки движения. Вдоль оси ОХ направлены и перемещениег и скорость V движущегося тела. Из формулы V =г /t. следует чтог = Vt. Согласно этой формуле, векторыг и Vt равны, поэтому равны и их проекции на ось ОХ : rх= vxt [ 2 ].r = v t.
Теперь можно установить кинематический закон равномерного прямолинейного движения, т.е. найти выражение для координаты тела в любой момент времени. Так как х = х0+ гх, а гх=VXt , то х = х0+Vxt [ 3 ].
Из формулы [3] видно, что для нахождения положения тела (материальной точки) в любой момент времени при прямолинейном равномерном движении нужно знать начальную координату тела (точки) Хо и проекцию вектора скорости на ось, вдоль которой движется тело. Но необходимо помнить, что проекция вектора скорости может быть как положительной, так и отрицательной.
Формула [3] позволяет выяснить, какой смысл имеет величина «скорость». Из нее следует; что Vx = (х-хо) /t; проекция скорости на ось равна изменению соответствующей координаты за единицу времени. Подчеркнем еще раз, что для решения основной задачи механики необходимо знать не только модуль скорости, но и ее направление.
б) Равноускоренное прямолинейное движение – это такое прямолинейное движение, при котором скорость тела за любые равные промежутки времени изменяется одинаково. Вспомним, что быстроту изменения скорости называют ускорением а.
[ 4 ] a =(V-Vo) /t , где Vo– начальная скорость тела, т.е. его мгновенная скорость в момент начала отсчета времени; V – мгновенная скорость тела в рассматриваемый момент времени. Из формулы [ 4 ] и определения равноускоренного движения следует, при таком движении ускорение не изменяется, т.е.а = const.В прямолинейном равноускоренном движении векторыVo,Vианаправлены по одной прямой. Поэтому модули их проекций на эту прямую равны модулям самих этих векторов; и поэтому формулу [ 4 ] можно записать так а = (V-Vo) /t [ 5 ]. Из [ 4 ] следует, что V = Vo + at – по этой формуле определяют мгновенную скорость V, если известны Vo – начальная скорость и ускорение а. Для прямолинейного равноускоренного движения эту формулу можно записать в виде: V = Vo + at [6].
Если Vo = 0, то V = at [ 7 ], Средняя скорость прямолинейного ускоренного равномерного движения может быть определена по формуле: Vcp = (Vo+ V) / 2, [ 8 ].
Где Vo – начальная скорость тела. ( материальной точки ),
V – скорость в данный момент времени.
Найдем кинематический закон прямолинейного равноускоренного движения. Для этого проинтегрируем выражение [6] и получим, что
s=Vot+at2/2 [ 9 ].
Если Vo=0 , то s=at2/2 [ 10 ]. По двум последним формулам [ 9 ] и [10] определяют путь, пройденный в равноускоренном прямолинейном движении (модуль перемещения тела. не изменяющего направления своего движения).
Для случая; когда тело движется по оси Ох из точки с координатой х0из формулы [ 9 ] получаем уравнение, выражающее зависимость координаты этого тела от времени. Т.к. х = хо+ гха гх=Voxt+axt2/2, то:x=xo+Voxt+axt2/2 [ 11 ].
Формула [ 11 ] есть кинематическое уравнение прямолинейного равноускоренного движения. Следует помнить., что Vохи аxмогут быть как положительными, так и отрицательными, т.к. это проекции векторовV0 иана ось Ох.
Установим связь модуля перемещения тела r с его скоростью равноускоренного прямолинейного движения. Из формулы [ 4 ] находим, чтоt= (V-Vo) /a, подставим это выражение в формулу мгновенной скорости получим:
Vo+VV-V
S=, следовательно S=(V2– Vо2)/2a или
2 aV2= Vо2+2as если Vo=О, то V2=2as
в) Неравномерное прямолинейное движение– это движение, при котором за равные промежутки времени тело (материальная точка) совершает неравные перемещения. При таком движении скорость тела с течением времени изменяется, поэтому для характеристики такого движения иcпользуются понятия средней и мгновенной скоростей. Vcp=г/t – средняя скорости – векторная величина, равная отношению перемещения тела к промежутку времени, за который совершено это перемещение. Vcpхарактеризует (переменное) неравномерное движение в течение только того промежутка времени, для которого эта скорость определена. Зная Vcpиt, можно определись перемещениеr=Vcpt. Найти положение движущегося тела в любой момент времени с помощью средней скорости нельзя.
Когда тело движется по прямолинейной траектории в одну сторону, модуль его перемещения равен пройденному телом пути, т. е. |r| =Vcpt. тогда Vcр=s/t, отсюдаs = Vcpt.
Для того, чтобы можно было определить положение, движущегося неравномерно тела, вводят понятие мгновенной скорости. Мгновенной скоростью неравномерного движения называют скорость, которую тело имеет в данный момент времена и, следовательно, в данной точке траектории. На предыдущей лекции вводилось понятие мгновенной скорости; числовое значение которой равно первой производной пути по времени, V=ds/dt. Если аналитический вид зависимости перемещения от времени известен, с помощью правил дифференцирования можно определить мгновенную скорость в любой момент времени.
Vмгн= dr/dt – векторная форма,
2. Движение происходящее, по криволинейной траектории, называется криволинейным.
Частным случаем криволинейного движения является движение по окружности.
При криволинейном движении мгновенная скорость материальной точки (тела) в каждой точке траектории криволинейного движения направлена по касательной к траектории. Следовательно, в криволинейном движении направление скорости тела непрерывно изменяется. Поскольку скорость – величина векторная, изменение направления скорости даже при неизмененном модуле скорости означает, что скорость изменяется, т.е. тело движется cускорением. Значит; любое криволинейное движение, в том числе движение по окружности, является ускоренным движением. Криволинейное движение происходит в том случае, когда вектор ускорения в любой точке траектории составляет с вектором скорости угол, не равный нулю или. Движение по любой криволинейной траектории можно приближенно представить как движение по дугам окружностей различных радиусов. Поэтому задача определения ускорения тела при произвольном криволинейном движении сводится к нахождению ускорения при движения тела по окружности соответствующего радиуса.
Траектория криволинейного
движения
рис.3
В случае движения материальной точки по окружности по аналогии с линейными скоростью и ускорением вводятся: угловая скоростьи угловое ускорение.Пусть точка движется по окружности радиуса R. Ее положение через малый промежуток времени зададим углом. Очень малые повороты можно рассматривать как векторы (будем эти векторы обозначать символамииd). Направление вектора поворота связывается с направлением вращения тела. Следовательно,dявляется не истинным вектором, а поездовектором.
Угловой скоростьюназывается векторная величина, равная первой производной угла поворота тела по времени
= lim/t=d/dt
t0
Направление вектора угловой скорости задается правилом правого винта: вектор угловой скорости совпадает по направлению поступательным движением острия винта, головка которого вращается по часовой стрелке.
Размерность угловой скорости [ ]= Т-1, а ее единица в системе СИ – рад/с. Линейная скорость точки
V = lim s/t = lim R /t = Rlim /t= R, т.е. V=R
t0 t0 t0
Если =const, то вращение равномерное и его можно характеризовать периодом вращения Т – временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2.
Т.к. промежутку времени t=Т соответствует=2, то=2/Т, откуда Т = 2/(т.к. при равномерном вращении=/t). Число полных оборотов, совершаемых телом при равномерном движении его по окружности, в единицу времени называетсячастотой вращения. n= 1/T =/(2), откуда= 2n.
Используя формулы : V=R; ац=V2/R, получим : ац=2Rили:
42R
ац= ———— = 42n2R
T2
Вектор может изменяться как за счет изменения скорости вращения тела вокруг оси (изменение по величине), так и за счет поворота оси вращения в пространстве (изменение угловой скорости по направлению).
Угловым ускорениемназывается векторная величина, равная первой производной угловой скорости по времени:=d/dt. Из этой формулы следует, что вектор углового ускорения направлен по оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор | |, при замедленном – антипараллелен. а= =dv/dt,V=Rи а=d(R)/dt=Rd/dt=R;an=V2/R=2R2/R=2R. Таким образом, связь между линейными и угловыми величинами выражается следующими формулами.
s=R;V=R; а=R;an=2R. В случае равнопеременного движения точки по окружности,=const,=0+t,=0 +0t+t2/2,
0– начальная угловая скорость. С помощью последней формулы можно в любой момент времени найти положение точки, равномерно переменно движущейся по окружности. Это значит, что данная формула выражает собой кинематический закон движения, т.е. является уравнением этого движения.
studfiles.net
1.7. Криволинейное движение. Тангенциальное и нормальное ускорения – Физические основы механики
Криволинейное движение – это движение, траектория которого представляет собой кривую линию (например, окружность, эллипс, гиперболу, параболу). Примером криволинейного движения является движение планет, конца стрелки часов по циферблату и т.д. В общем случае скорость при криволинейном движении изменяется по величине и по направлению.
Криволинейное движение материальной точки считается равномерным движением, если модуль скорости постоянен (например, равномерное движение по окружности), и равноускоренным, если модуль и направление скорости изменяется (например, движение тела, брошенного под углом к горизонту).
Рис. 1.19. Траектория и вектор перемещения при криволинейном движении.
При движении по криволинейной траектории вектор перемещения направлен по хорде (рис. 1.19), а l – длина траектории. Мгновенная скорость движения тела (то есть скорость тела в данной точке траектории) направлена по касательной в той точке траектории, где в данный момент находится движущееся тело (рис. 1.20).
Рис. 1.20. Мгновенная скорость при криволинейном движении.
Криволинейное движение – это всегда ускоренное движение. То естьускорение при криволинейном движении присутствует всегда, даже если модуль скорости не изменяется, а изменяется только направление скорости. Изменение величины скорости за единицу времени – это тангенциальное ускорение:
или
Где vτ, v0 – величины скоростей в момент времени t0 + Δt и t0соответственно.
Тангенциальное ускорение в данной точке траектории по направлению совпадает с направлением скорости движения тела или противоположно ему.
Нормальное ускорение – это изменение скорости по направлению за единицу времени:
Нормальное ускорение направлено по радиусу кривизны траектории (к оси вращения). Нормальное ускорение перпендикулярно направлению скорости.
Центростремительное ускорение – это нормальное ускорение при равномерном движении по окружности.
Полное ускорение при равнопеременном криволинейном движении тела равно:
Движение тела по криволинейной траектории можно приближённо представить как движение по дугам некоторых окружностей (рис. 1.21).
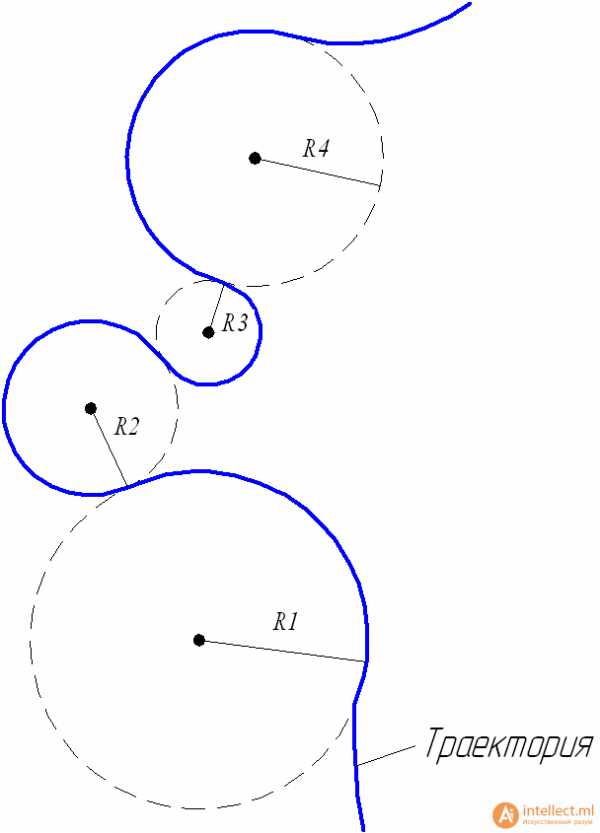
Рис. 1.21. Движение тела при криволинейном движении.
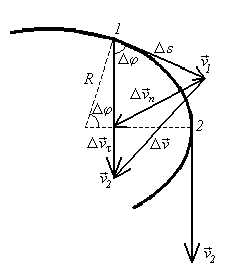
При прямолинейном движении векторы скорости и ускорения совпадают с направлением траектории. Рассмотрим движение материальной точки по криволинейной плоской траектории. Вектор скорости в любой точке траектории направлен по касательной к ней. Допустим, что в т.М траектории скорость была , а в т.М1стала . При этом считаем, что промежуток времени при переходе точки на пути из М в М1 настолько мал, что изменением ускорения по величине и направлению можно пренебречь. Для того, чтобы найти вектор изменения скорости , необходимо определить векторную разность:
Для этого перенесем параллельно самому себе, совмещая его начало с точкой М. Разность двух векторов равна вектору, соединяющему их концы равна стороне АС МАС, построенного на векторах скоростей, как на сторонах. Разложим вектор на две составляющих АВ и АД, и обе соответственно через и . Таким образом вектор изменения скорости равен векторной сумме двух векторов:
По определению:
| (1.15) |
Тангенциальное ускорение характеризует быстроту изменения скорости движения по численному значению и направлена по касательной к траектории.
Следовательно
| (1.16) |
Нормальное ускорение характеризует быстроту изменения скорости по направлению. Вычислим вектор:
Для этого проведем перпендикуляр через точки М и М1 к касательным к траектории (рис. 1.4) Точку пересечения обозначим через О. При достаточно малом участок криволинейной траектории можно считать частью окружности радиуса R. Треугольники МОМ1 и МВС подобны, потому, что являются равнобедренными треугольниками с одинаковыми углами при вершинах. Поэтому:
или
Но , тогда:
Переходя к пределу при и учитывая, что при этом , находим:
,
| (1.17) |
Так как при угол , направление этого ускорения совпадает с направлением нормали к скорости , т.е. вектор ускорения перпендикулярен . Поэтому это ускорение часто называют центростремительным.
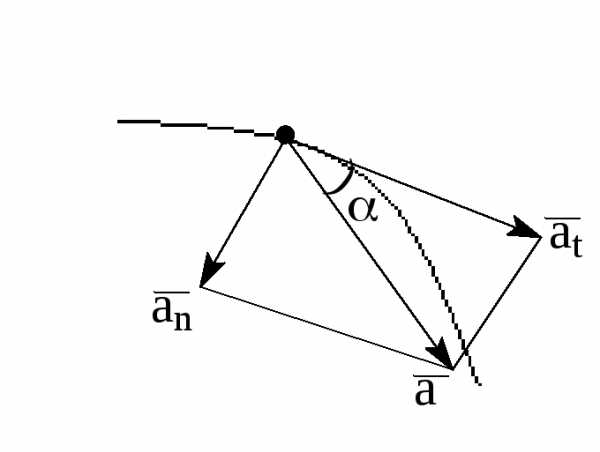
Полное ускорение определяется векторной суммой тангенциального нормального ускорений (1.15). Так как векторы этих ускорений взаимноперпендикулярны, то модуль полного ускорения равен:
| (1.18) |
Направление полного ускорения определяется углом между векторам и :
intellect.ml
Криволинейное движение
Криволинейное движение
Криволинейные движения – движения, траектории которых представляют собой не прямые, а кривые линии. По криволинейным траекториям движутся планеты, воды рек.
Криволинейное движение – это всегда движение с ускорением, даже если по модулю скорость постоянна. Криволинейное движение с постоянным ускорением всегда происходит в той плоскости, в которой находятся векторы ускорения и начальные скорости точки. В случае криволинейного движения с постоянным ускорением в плоскости xOy проекции vxи vy ее скорости на оси Ox и Oy и координаты x и y точки в любой момент времени t определяется по формулам
Частным случаем криволинейного движения – является движение по окружности. Движение по окружности, даже равномерное, всегда есть движение ускоренное: модуль скорости все время направлен по касательной к траектории, постоянно меняет направление, поэтому движение по окружности всегда происходит с центростремительным ускорением где r – радиус окружности.
Вектор ускорения при движении по окружности направлен к центру окружности и перпендикулярно вектору скорости.
При криволинейном движении ускорение можно представить как сумму нормальной и тангенциальной составляющих:
,
– нормальное (центростремительное) ускорение, направлено к центру кривизны траектории и характеризует изменение скорости по направлению:
v – мгновенное значение скорости, r – радиус кривизна траектории в данной точке.
– тангенциальное (касательное) ускорение, направлено по касательной к траектории и характеризует изменение скорости по модулю.
Полное ускорение, с которым движется материальная точка, равно:
.
Кроме центростремительного ускорения, важнейшими характеристиками равномерного движения по окружности являются период и частота обращения.
Период обращения— это время, за которое тело совершается один оборот.
Обозначается период буквой Т (с) и определяется по формуле:
где t — время обращения, п — число оборотов, совершенных за это время.
Частота обращения— это величина, численно равная числу оборотов, совершенных за единицу времени.
Обозначается частота греческой буквой (ню) и находится по формуле:
Измеряется частота в 1/с.
Период и частота — величины взаимно обратные:
Если тело, двигаясь по окружности со скоростью v, делает один оборот, то пройденный этим телом путь можно найти, умножив скорость v на время одного оборота:
l = vT. С другой стороны, этот путь равен длине окружности 2πr. Поэтому
vT = 2πr,
где w (с-1) – угловая скорость.
При неизменной частоте обращения центростремительное ускорение прямо пропорционально расстоянию от движущейся частицы до центра вращения.
Угловая скорость (w) – величина, равная отношению угла поворота радиуса, на котором находится вращающаяся точка, к промежутку времени, за который произошел этот поворот:
.
Связь между линейной и угловой скоростями:
v= wr.
Движение тела можно считать известным лишь тогда, когда известно, как движется каждая его точка. Самое простое движение твердых тел – поступательное. Поступательным называется движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается параллельно самой себе.
sfiz.ru
Скорость материальной точки.
| Пусть при движении
по криволинейной траектории материальная
точка в некоторый момент времени t1 занимала
положение A с
радиус-вектором |
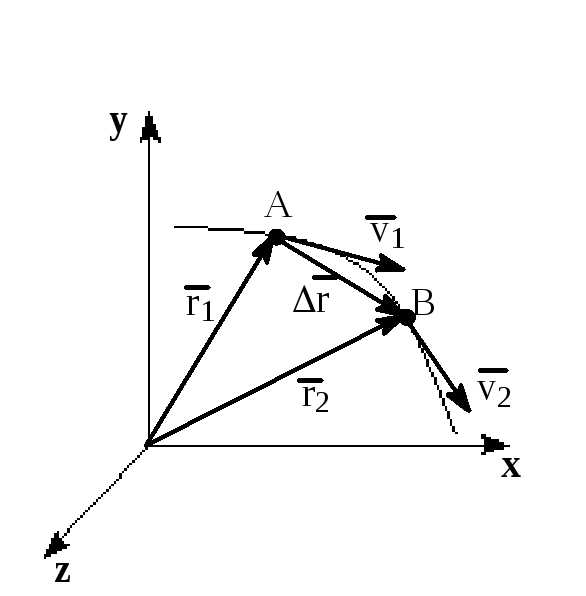
 ,
а в момент времениt2=t1+t – положение B с радиус-вектором
,
а в момент времениt2=t1+t – положение B с радиус-вектором  .
За времяt=t2–t1 радиус-вектор получил приращение
.
.
За времяt=t2–t1 радиус-вектор получил приращение
.Средней векторной скоростью материальной точки называют отношение приращения радиус-вектора точки к тому промежутку времени, за которые это приращение произошло:
 (1)
(1)
Средняя путевая скорость:
В Международной системе (СИ) единицей расстояния является метр, единицей времени – секунда, поэтому скорость выражается в метрах в секунду:

Если  ,
то отношение
,
то отношение стремится к некоторому пределу,
называемому скоростью материальной
точки в момент времениt или мгновенной скоростью
стремится к некоторому пределу,
называемому скоростью материальной
точки в момент времениt или мгновенной скоростью  :
:
 (2)
(2)
Мгновенной
скоростью точки называют вектор, численно равный
первой производной по времени от
радиус-вектора, определяющего положение
этой точки в данный момент времени.
Вектор  направлен по касательной к траектории
в этой точке, т.е.:
направлен по касательной к траектории
в этой точке, т.е.:
(3)
 – единичный вектор
касательной к траектории в данной точке;
– единичный вектор
касательной к траектории в данной точке;
v – модуль скорости, равный:
.
Движение с постоянной по модулю и направлению скоростью называется прямолинейным равномерным движением.
При прямолинейном движении (по модулю):
В реальных условиях движение любого тела никогда не бывает строго равномерным и прямолинейным. Движение, при котором тело за равные промежутки времени совершает неодинаковые перемещения, называют неравномерным движением.
Ускорение материальной точки.
Ускорение  характеризует быстроту изменения
скорости и по направлению и по величине.
характеризует быстроту изменения
скорости и по направлению и по величине.
Средним ускорением точки называют вектор, равный отношению приращения скорости к тому промежутку времени, за который это приращение произошло:
 (4)
(4)
Вектор
(5)
– называется мгновенным ускорением точки или ускорением в данный момент времени.
Без учета направления:
 .
.
Тангенциальное и нормальное ускорение.
При криволинейном
движении происходит изменение скорости,
как по величине, так и по направлению.
Принимая во внимание, что  ,
представим
,
представим в виде суммы двух векторов:
в виде суммы двух векторов:
(6)
Первое слагаемое характеризует изменение скорости по величине и называется тангенциальным ускорением:
 (7)
(7)
Численное значение
тангенциального ускорения равно  ,
а направление совпадает с направлением
касательной к траектории движения.
,
а направление совпадает с направлением
касательной к траектории движения.
Второе слагаемое характеризует изменение скорости по направлению и называется нормальным ускорением:
 (8)
(8)
Численное значение нормального ускорения равно:
 (9)
(9)
R – радиус
кривизны траектории в точке, где
определяется ускорение. Направление
совпадает с нормалью  к траектории.
к траектории.
Разложение
ускорения на тангенциальное и нормальное
поясним рисунком. Представим вектор  в виде суммы двух векторов, для чего
вдоль направления
в виде суммы двух векторов, для чего
вдоль направления отложим длинуAL вектора
отложим длинуAL вектора  и соединим точкиD и L.
Из рисунка видно, что
,
причем вектор
и соединим точкиD и L.
Из рисунка видно, что
,
причем вектор дает изменение скорости по величине
дает изменение скорости по величине ,
а вектор
,
а вектор – по направлению
– по направлению .
Тогда.
Разделим почленно наt
и перейдем к пределу t0:
.
Тогда.
Разделим почленно наt
и перейдем к пределу t0:
тогда получим, что полное ускорение точки равно:
(10)
| По модулю полное ускорение равно: Направление определяется углом : |
Самый простой вид неравномерного движения – равноускоренное движение. Равноускоренным называется движение с постоянным по модулю и направлению ускорением.
При равноускоренном
движении с начальной скоростью  ускорение
равно:
ускорение
равно:
где  – скорость в момент времени t.
– скорость в момент времени t.
Отсюда скорость равноускоренного движения:
studfiles.net
Ускорение при криволинейном движении материальной точки
В
механике вводится еще одна важная
характеристика движения – ускорение,
т.е. скорость изменения вектора скорости  во времени:
во времени:
– ускорение при криволинейном движении материальной точки.
Учитывая
определение скорости  ,
ускорение
,
ускорение  есть вторая производная от радиус-вектора
есть вторая производная от радиус-вектора  по времени t (две точки означают вторую производную
по времени t).
Легко установить связь с координатным
представлением ускорения:
по времени t (две точки означают вторую производную
по времени t).
Легко установить связь с координатным
представлением ускорения:
– модуль вектора ускорения.
Особенно удобен естественный способ представления ускорения.
В общем случае криволинейного движения ускорение направлено под некоторым углом к скорости
направлено под некоторым углом к скорости  .
Представим вектор
.
Представим вектор  в виде суммы двух векторов, один из
которых направлен по скорости
в виде суммы двух векторов, один из
которых направлен по скорости  ,
т.е. по касательной, а второй по нормали
к траектории в этой точке:
,
т.е. по касательной, а второй по нормали
к траектории в этой точке:  .
.
Эти две сотавляющие ускорения имеют специальные названия:
 –тангенциальное
ускорение,
–тангенциальное
ускорение,  – нормальное ускорение.
– нормальное ускорение.
Приступим теперь
к определению  и
и  .
Для этого нарисуем траекторию движения
.
Для этого нарисуем траекторию движения  (t)
и снова выберем два близких момента
времени t и t + t.
(t)
и снова выберем два близких момента
времени t и t + t.
 материальная точка находилась в точке 1 и скорость
ее равнялась
материальная точка находилась в точке 1 и скорость
ее равнялась  ,
а в момент времени t + t – в точке 2 и скорость ее равнялась
,
а в момент времени t + t – в точке 2 и скорость ее равнялась  .
За время t вектор скорости
.
За время t вектор скорости  изменился как по модулю, так и по
направлению. Для того, чтобы определить
изменился как по модулю, так и по
направлению. Для того, чтобы определить  ,
перенесем вектор
,
перенесем вектор  в точку 1 и
представим
в точку 1 и
представим  в виде суммы двух векторов
в виде суммы двух векторов  и
и  .
При этом модуль вектора .
.
При этом модуль вектора ..
Согласно определению ускорения:
.
Как видно из построения,
 ,
и модуль вектора
,
и модуль вектора  равен производной от модуля вектора
скорости, т.е.
равен производной от модуля вектора
скорости, т.е.
 – тангенциальное
ускорение при криволинейном движении.
– тангенциальное
ускорение при криволинейном движении.
Для нахождения модуля вектора
 ,
сделаем дополнительные построения, а
именно, в точках 1 и 2 проведем
нормали к траектории и будем считать
достаточно малый участок кривой 1–2 дугой окружности радиуса R . Тогда
, откуда
следует, что
,
сделаем дополнительные построения, а
именно, в точках 1 и 2 проведем
нормали к траектории и будем считать
достаточно малый участок кривой 1–2 дугой окружности радиуса R . Тогда
, откуда
следует, что
 .
.
.
.
Зная
угол
, найдем модуль вектора  :
:
Возвращаясь
к определению  ,
находим
,
находим

– нормальное ускорение при криволинейном движении,
где R– радиус кривизны траектории.
Рассмотрим два частных случая:
Равномерное движение материальной точки по окружности: v = const.
Тогда тангенциальное ускорение равно нулю и полное ускорение равно нормальному, т.е. центростремительному ускорению:
Прямолинейное движение материальной точки:
В этом случае радиус кривизны траектории равен бесконечности и нормальное ускорение равно нулю. Полное ускорение равно тангенциальному и направлено вдоль направления движения: если а 0, по направлению движения, если а 0, против направления движения.
studfiles.net