
План скоростей и ускорений | Лекции и примеры решения задач механики
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное – движение данной точки относительно той, движение которой принято за переносное:
На плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана.
На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает. Отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек.
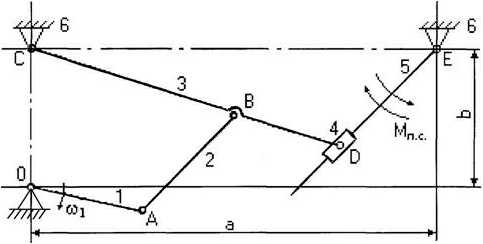
Рисунок 1 – Кинематическая схема плоского рычажного механизма
Рассмотрим построение планов для механизма, представленного на рисунке 1. Вначале рассматривается начальный механизм, а далее решение ведется по группам Ассура в порядке их присоединения.
Начальный механизм:
Здесь
По вычисленному значению VA выбираем масштаб плана скоростей KV и из произвольного полюса откладываем отрезок va изображающий эту скорость:
Можно также назначать отрезок va а масштаб KV вычислять:
Группа Ассура второго класса 1-го вида (звенья 2, 3):
Истинные значения (в м/с) относительных скоростей VBA и VBC определяются после построения плана умножением соответствующих отрезков (в мм) на масштаб плана:
а зная их, можно определить и угловые скорости звеньев 2 и 3:
Скорость точки D на плане скоростей можно определить по подобию. (Если известны скорости двух точек одного и того же звена, то скорость любой третьей точки этого же звена можно определить, построив на плане скоростей фигуру, подобную фигуре, образованной этими же буквами на звене механизма). Точки С, В , D на звене 3 лежат на одной прямой. На плане строим отрезок сd, соблюдая условие подобия:
Группа Ассура второго класса 3-го вида (звенья 4,5) :
где D5 — точка, находящаяся на звене 5 под точкой D. После определения скорости движения точки D5
Примечание: в данном случае размер DE является величиной переменной (т.е. в задании он отсутствует), поэтому в каждом положении механизма он определяется через отрезок на чертеже и масштаб длин.
План ускорений строится в таком же порядке.
Начальный механизм
Ускорение точки A состоит только из нормальной составляющей, т.к. задана постоянная угловая скорость первого звена (ω1=соnst):
По вычисленному значению ускорения точки A выбирается масштаб плана ускорений и определяется отрезок на плане, соответствующий этому ускорению (или вычисляется масштаб плана ускорений по выбранному отрезку, изображающему ускорение точки A):
Здесь точка w – полюс плана ускорений.
Группа Ассура (звенья 2,3) второго класса 1-го вида:
После построения определяются aτBA и aτBC, по которым можно вычислить угловые ускорения звеньев 2 и 3:
Ускорение точки D определяем по подобию так же, как определяли скорость этой точки:
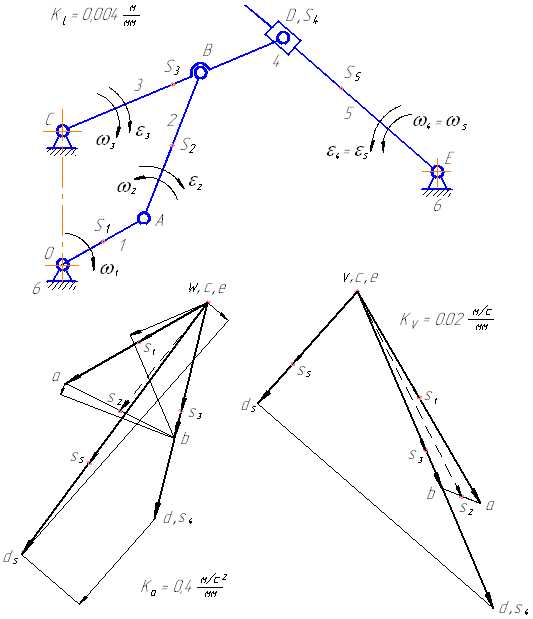
Рисунок 5 – Планы скоростей и ускорений для заданного положения механизма
Группа Ассура (звенья 4,5) второго класса 3-го вида:
Для определения направления
При силовом расчете необходимо иметь ускорения центров масс (asi), которые на плане ускорений определяются методом подобия.
Планы скоростей и ускорений для первого положения заданного механизма приведены на рисунке 5.
Уравнение планов скоростей и ускорений для каждой группы Ассура приведены в таблице 1.
Таблица 1 – Кинематический анализ групп Ассура II класса методом планов
Пример расчета механизма с поступательно движущимся выходным звеном >
Курсовой проект по ТММ >
ТММ
СОДЕРЖАНИЕ:
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА. 2
Задание на курсовой проект. 2
Структурный анализ механизма. 2
План положений механизма. Построение графиков. 3
Построение плана скоростей. 3
Построение плана ускорений. 5
кинетостатический анализ рычажного механизма 6
Кинетостатический расчет группы звеньев 2 – 3. 7
Рычаг Н.Е. Жуковского. 8
Список Литературы 10
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА.
Задание на курсовой проект.
В курсовом проекте необходимо рассчитать кривошипно-шатунный механизм по следующим исходным данным:

Рис. 1. Схема кривошипно-шатунного механизма.
Число оборотов пОА=120 об/мин
Длина кривошипа ОА=0,06м
Длина шатуна АВ=0,14 м
Длина ДВ=0,03 м
Длина СВ=0,20м
а=0,02 м
в=0,18м
Угол =60
Момент полезного сопротивления Мп.с.=60Н*м
Структурный анализ механизма.
Плоский кривошипно-шатунный механизм состоит из 3-х подвижных звеньев и 2-х неподвижных (стоек). Механизм имеет вращательные кинематические пары пары 5-го класса, где p5=3.Степень подвижности механизма определяем по формуле Чебышева:
где 3 – количество свободных движений отдельно взятого звена на плоскости;
n=3 – число подвижных звеньев;
2 – число условий связи (ограничений), накладываемых парами пятого класса;
р5 =3 – число пар пятого класса;
р4 =2 – число пар четвертого класса.
План положений механизма. Построение графиков.
В масштабе длин  строим планы положений механизма для
двенадцати положений в предположении
того, что угловая скорость ведущего
звена (кривошипа ОА) постоянна (1=const).
Кривошип ОА изображаем в 12 положениях
через каждые 30,
начиная с положения, соответствующего
крайнему правому положению коромысла
СВ. Данное положение принимаем за начало
рабочего хода ведомого звена. Затем
изображаем все остальные звенья механизма
в положениях, соответствующих положениям
кривошипа.
строим планы положений механизма для
двенадцати положений в предположении
того, что угловая скорость ведущего
звена (кривошипа ОА) постоянна (1=const).
Кривошип ОА изображаем в 12 положениях
через каждые 30,
начиная с положения, соответствующего
крайнему правому положению коромысла
СВ. Данное положение принимаем за начало
рабочего хода ведомого звена. Затем
изображаем все остальные звенья механизма
в положениях, соответствующих положениям
кривошипа.
Строим график зависимости угла поворота коромысла, от угла поворота кривошипа. Определяем масштабы построений:
Масштаб для оси угловых перемещений кривошипа:.
 – т.к. при построение
диаграммы перемещений, масштаб построения
не изменился.
– т.к. при построение
диаграммы перемещений, масштаб построения
не изменился.
Определим  :
:
Определим  :мc-2/мм
:мc-2/мм
Определим  :мc-2/мм
:мc-2/мм
Построение плана скоростей.
Скорость точки. А:
Из полюса Р откладываем отрезок Ра звену ОА направленный в сторону вращения кривошипа ОА (по касательной к траектории движения точки А) длиной 50 мм изображающий вектор скорости точки А.
Масштаб плана скоростей:
Скорость точки В определяется системой уравнений:
Линии действия неизвестных скоростей известны, они будут перпендикулярны звеньям АВ и СВ соответственно. По этому данную систему уравнений можно решить графически.
Через конец вектора скорости точки А проводим линию действия вектора скорости VBА. Из полюса проводим линию действия вектора скорости
м/с.
м/с.
Скорость точки D находим аналогично:
Точка d на плане скоростей будет лежать на продолжении отрезка аb. Длина отрезка аd на плане:
Соединив точку d с полюсом, найдем абсолютную скорость точки D.
м/с.
Найдем скорость VS2A:
Минимальная скорость первого звена:
Угловые скорости звеньев:
;
;
;
Скорости точек в рабочем положении.
VA | VB | VD | VS1 | VS2 | VS3 | VВА | VDA | VS2А | |
Длины отрезков плана скоростей, мм | 50 | 55 | 56 | 25 | 52 | 27,5 | 24 | 27,16 | 12,348 |
Скорости точек, м/с | 1,458 | 1,603 | 1,658 | 0,729 | 1,521 | 0,8 | 0,7 | 0,792 | 0,36 |
Построение плана ускорений.
Планы ускорений также строим для рабочего положения.
Ускорение точки А:
 ,
,
 ,
потому что
,
потому что
Из полюса откладываем отрезок длиной 50 мм изображающий вектор ускорения точкиА. Направление вектора от точки А к точке О.
Масштаб плана ускорений:
Для нахождения ускорения точки В составляем систему уравнений:
Зная угловые скорости, можем определить нормальные составляющие ускорений:
, 
,
Согласно векторным
уравнениям откладываем  и
и  и перпендикулярно к ним откладываем
векторы тангенциальных ускорений, точка
пересечения которых дает нам абсолютный
вектор ускорения точки В.
и перпендикулярно к ним откладываем
векторы тангенциальных ускорений, точка
пересечения которых дает нам абсолютный
вектор ускорения точки В.
м/с2.
, 
,
Угловые ускорения звеньев.
с-2;
с-2;
Ускорения точек в рабочем положении.
aA | aB | anBA | aBA | anBС | aBС | as1 | as2 | as3 | |
Длины отрезков плана ускорений, мм | 50 | 22 | 4,879 | 4,879 | 20 | 4 | 25 | 23 | 11 |
Ускорения точек, м/с2 | 17,706 | 7,791 | 1,728 | 11,686 | 7,114 | 1,417 | 8,853 | 8,145 | 3,895 |
Ускорения центров масс звеньев.
м/с2;
м/с2;
м/с2;
Для кинетостатического расчета определяем все активные силы:
Принимаем удельную массу одного метра звена .
Массы звеньев кг.
Масса 1-го звена кг;
Масса 2-го звена кг;
Масса 3-го звена кг;
Силы тяжести Н.
Сила тяжести 1-го звена Н;
Сила тяжести 2-го звена Н;
Сила тяжести 3-го звена Н;
Силы инерции Н,
Сила инерции 1-го звена Н;
Сила инерции 2-го звена Н;
Сила инерции 3-го звена Н;
Моменты сил инерции Нм,
Момент силы инерции 2-го звена Нм;
Момент силы инерции 3-го звена Нм;
Момент полезного сопротивления МП.с.=60 Н/м.
Кинетостатический расчет группы звеньев 2 – 3.
Строим
группы Асура 2 и 3 звеньев в масштабе  ,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции. Также
прикладываем реакцииR0,3 и R1,2,
которые требуется определить. Определяем
плечи действия активных сил относительно
точки В:
,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции. Также
прикладываем реакцииR0,3 и R1,2,
которые требуется определить. Определяем
плечи действия активных сил относительно
точки В:
м;
м;
м;
м;
Составляем уравнения моментов всех сил действующих на 3 звено относительно точки В:
;
;
Составляем уравнения моментов всех сил действующих на 2 звено относительно точки В:
;
Составляем векторное уравнение равновесия всех сил, действующих на группу звеньев 2-3:

 ;
;
В
выбранном масштабе сил  строим план сил, указанных в уравнении.
Из плана сил определяем
строим план сил, указанных в уравнении.
Из плана сил определяем и
и :
:

 H;
H;
 H.
H.
Исходя из суммы векторов нормальной и тангенциальной реакции опоры находим значения сил R0,3 и R1,2:
H;
H.
Кинетостатический расчет ведущего звена.
Строим
ведущее звено в масштабе  ,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции и реакцию
опорыR2,1.
Также прикладываем реакцию R0,1,
которую требуется определить. Реакция R2,1 приложена в точке А и равна по величине
реакции R1,2,
но противоположна ей по направлению.
Прикладываем уравновешивающую силу
перпендикулярно звену ОА в точке А.
,
в соответствующих точках прикладываем
все активные силы: силы тяжести, силы
инерции, моменты сил инерции и реакцию
опорыR2,1.
Также прикладываем реакцию R0,1,
которую требуется определить. Реакция R2,1 приложена в точке А и равна по величине
реакции R1,2,
но противоположна ей по направлению.
Прикладываем уравновешивающую силу
перпендикулярно звену ОА в точке А.
Определяем плечи действия этих сил:
 м.
м.
м.
Составляем уравнения моментов всех сил действующих на 1 звено относительно точки О:
;
;
Н.
Остальные силы момента относительно точки О момента не создают, т.к. действуют в той же плоскости, в которой находится само звено.
Составляем векторное уравнение равновесия всех сил, действующих на ведущее звено:
В
выбранном масштабе сил  строим план сил.
строим план сил.
Рычаг Н.Е. Жуковского.
Условная уравновешивающая сила определяется методом рычага Жуковского. Для того чтобы построить рычаг Жуковского, поворачиваем план скоростей в любую сторону на 90 и параллельно перенося, наносим все активные силы, действующие на механизм в соответствующих точках. При переносе моментов сил инерции, определяем их величину для плана скоростей из отношений:
 ,
,
Где:
ab, оb, cb – масштабные отрезки на плане скоростей, мм;
–длины звеньев, м.
Нмм;
Нмм;
 Нмм.
Нмм.
Плечи действия сил на рычаге Жуковского:
Н1=6 мм; Н2=26 мм; Н3=31 мм; Н4=16 мм; Н5=24 мм; Н6=39 мм; Н7=51 мм;
Составляем уравнения равновесия в форме моментов сил относительно полюса плана скоростей и определяем условную уравновешивающую силу РУр:
.
 .
.
Погрешность незначительна, на основании чего можно сделать вывод, что расчеты произведены, верно. За расчетное значение уравновешивающей силы принимаем большее из полученных значений.
Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов.– 4-е изд., перераб. И доп.–М.: Наука. Гл. ред. физ-мат. лит., 1988. – 640 с..
А.С. Кореняко, Л.И. Кременштейн. Курсовое проектирование по теории механизмов и механике машин: Учеб. пособие для студентов технических вузов/Под ред. А.С. Кореняко, 5-е изд., перераб. – Киев: «Вища шк».,1970, 332с.
С.А. Попов, Г.А. Тимофеев. Курсовое проектирование по теории механизмов и механике машин: Учебое пособие для втузов/Под ред. К.В. Фролова.–3-е изд., стер. – М.: Высш. шк.,1999.
10
studfiles.net
Метод планов скоростей и ускорений
Метод планов скоростей и ускорений относится к графо-аналитическим методам исследования кинематики механизмов.
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное — движение данной точки относительно той, движение которой принято за переносное:
Этот принцип в равной степени относится к перемещениям, скоростям и ускорениям:
Планы скоростей и ускорений обладают следующими свойствами:
- на плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана. На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает;
- отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек. Вектор относительной скорости направлен на плане к той точке, которая в индексе скорости стоит на первом месте;
- фигуры, образованные точками одного и того же жесткого звена на плане и на механизме, подобны. Поэтому, если на звене известны скорости и ускорения двух точек, то скорость и ускорение любой третьей точки этого же звена можно найти по подобию;
- имея план скоростей, можно найти угловую скорость любого звена механизма. Для определения угловой скорости исследуемого звена надо взять относительную скорость двух любых точек данного звена и разделить на расстояние между этими точками на механизме;
- имея план ускорений, можно найти угловое ускорение любого звена механизма. Для определения углового ускорения исследуемого звена надо взять тангенциальную составляющую относительного ускорения двух любых точек данного звена и разделить на расстояние между этими точками на механизме;
- звенья, соединенные в поступательную кинематическую пару, имеют одинаковые угловые скорости и одинаковые угловые ускорения.
При кинематическом исследовании плоских механизмов методом планов скоростей и ускорений встречается два случая:
1) две точки (одна исследуемая, вторая с известным законом движения, которое принимается в качестве переносного) принадлежат одному и тому же жесткому звену (рисунок 13).
В данном случае относительное движение этих точек получается за счет вращательного движения звена, на котором они находятся. При определении ускорений относительное ускорение раскладывается на нормальное (известное из физики как центростремительное – стремящееся к центру вращения) и тангенциальное.
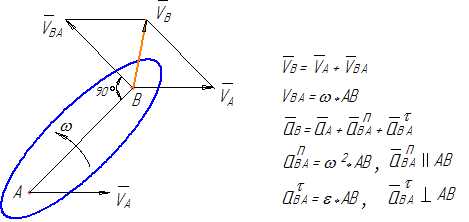
Рисунок 13
Для примера, приведенного на рисунке 13, нормальное ускорение точки В относительно точки А будет направлено вдоль радиуса ВА к точке А. Тангенциальное – перпендикулярно этому радиусу;
2) звенья соединяются поступательной парой. В этом случае рассматриваются две точки, совпадающие в данный момент времени по своему положению, но принадлежащие разным звеньям – одна ползуну, другая направляющей (рисунок 14).
Рисунок 14
Если известен закон движения направляющей 1, то известны характеристики движения любой точки на этом звене, в том числе и точки С1, принадлежащей этой направляющей.
Движение точки С1 принимается в качестве переносного. Движение точки С2, принадлежащей ползуну, относительно точки С1 получается за счет поступательного движения ползуна вдоль направляющей (влияние вращательного движения исключается, т.к. радиус вращения равен нулю – положение точек С1 и С2 совпадает). При определении ускорений кроме относительного ускорения, направленного вдоль направляющей, возникает кориолисово ускорение (см. рисунок 14).
Исследование кинематики механизма методом планов начинается с начального механизма (с входного звена) и далее ведется по группам Ассура в порядке их присоединения к механизму. Для каждой группы Ассура разработаны методы решения (уравнения и порядок построения планов), которые являются неизменными, независимо от того, в каком механизме данная группа Ассура находится.
Уравнения планов для групп Ассура второго класса приведены в таблице 3.1.
Таблица 3.1 – Кинематический анализ групп Ассура II класса методом планов
Аналитический метод кинематического исследования >
Курсовой проект по ТММ >
isopromat.ru
Построение планов скоростей
Последовательность действий для нахождения скоростей точек звеньев на примере положения 2.

Рис. 7
Скорость точки А:
Вектор скорости в точке А перпендикулярен кривошипу ОА.
Принимаем отрезок
Масштаб планов скоростей скорости:
Скорость точки В:
где: υC=0 (совпадает с полюсом плана скорости), т.к точка С является стойкой
и
Вектор скорости точки А известен, как по направлению, так и по значению, а вектора скоростей АВ и В только по направлению. Следовательно по плану скоростей можно определить скорость точки В. Из точки а проводится прямая, перпендикулярная звену АВ. Из точки проводиться прямая, перпендикулярная коромыслу СВ. Точка пересечения двух прямых является точкаb.
, ab=19 мм
Скорость точки D:
Точка D принадлежит звену ВС, следовательно вектор скорости лежит на отрезке . Длина отрезка находиться из соотношения:
мм
где: длина отрезка pb берётся из плана скоростей, а CD и CB из плана положений механизма.
Вектор скорости точки D можно разложить на две составляющие:
Вектор является вертикальной прямой выходящей из точки, совпадающая с вектором скорости точки Е. Скорость .
Согласно векторному уравнению необходимо из точки d провести отрезок параллельный CD, а из точки pυ провести отрезок вертикальный отрезок до пересечения. Точка пересечения – точка е,
Скорости в точках центров масс .
Т.к ,BS3=0.5BC, то точка S2 находиться на середине вектора ab, точка S3 находиться на середине вектора pb, а точка S5 совпадает с точкой e.

Рис. 8
Для нахождения скоростей в другом положении механизма действия аналогичны.
Расчётные формулы:
=0,354 м/с
Таблица 3
Положение | ||||||||||
м/с | рад/с | |||||||||
0 | 0 | 0.72 | 0 | 0 | 0 | 0.36 | 0 | 1.94 | 0 | |
2 | 0.708 | 0.190 | 0.294 | 0.072 | 0.303 | 0.708 | 0.354 | 0.513 | 0.769 | |
4 | 0.524 | 0.408 | 0.211 | 0.011 | 0.211 | 0.596 | 0.262 | 1.103 | 0.57 | |
6 | 0.131 | 0.728 | 0.052 | 0.002 | 0.053 | 0.368 | 0.066 | 1.97 | 0.142 | |
8 | 0.352 | 0.451 | 0.142 | 0.002 | 0.142 | 0.520 | 0.176 | 1.219 | 0.383 | |
10 | 1.023 | 0.687 | 0.419 | 0.083 | 0.427 | 0.815 | 0.512 | 1.857 | 1.112 | |
Построение планов ускорений
Последовательность действий для нахождения ускорений точек звеньев на примере положения 2.
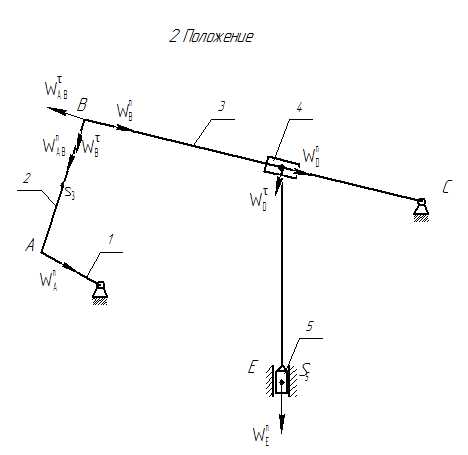
Рис. 9
Ускорение точки А:
Точка А движется по окружности и в общем случае ускорение будет иметь две составляющие (нормальную и тангенциальную):
Так как по условию, угловая скорость звена ОА постоянна, то угловое ускорение будет равно нулю и следовательно касательное ускорение тоже равно 0.
примем равным 72 мм. Масштаб ускорения тогда будет равен:
Вектор ускорения в точке А параллелен ОА.
Ускорение в точке В:
Так как траектория движения точки В является окружность, то ускорение имеет две составляющие:
Длина вектора нормального ускорения для точки В определяется как:
Касательное ускорение известно только по направлению, поэтому для построения вектора ускорения точки В необходимо дополнительное условие.
Ускорение точки B может находиться как:
Следует отметить, что шатун АВ имеет вращательное движение, а значит его ускорение можно разделить на две составляющие:
Из точки pW откладываем нормальное ускорение (вектор pWb/ параллельный коромыслу BC), а так же касательное ускорение WtB ( вектор b/b перпендикулярный WnB ). Из точки А строим вектор WnAB(aa/) параллельный шатуну AB, а к нему касательное ускорение WtAB (a/b) перпендикулярное WnAB. В пересечения касательных ускорений образуется точка B, а расстояние pWb есть вектор ускорения точки В.
Ускорение точки D:
Ускорение точки Е:
где: WКD– вектор поворотного кориолисова ускорения который определяется как:
Вектор кориолисова ускорения повёрнут относительно скорости VD4 на 900 в направлении вращения кулисы;
–вектор относительного ускорения параллельный BC.
Так как нам известно, что направление ускорение точки Е вертикальная прямая выходящая из точки рw, то, отложив все рассчитанные ускорения и линии действия неизвестных, на пересечении получаем точку е.
Ускорения в центрах масс S2, S3, S5.
Точка S2 находиться на середине вектора ab, точка S3 находиться на середине вектора pWb.

Рис. 10
Ускорения для других положений находятся аналогично.
Угловое ускорение:
Таблица 4
Положение | WB | WtB | WnB | WАВ | WtАВ | WnАВ | WD | WКD | WtD |
м/с2 | |||||||||
0 | 4.61 | 0 | 0 | 2.213 | 1.72 | 1.39 | 1.984 | 0 | 0 |
2 | 0.883 | 0.694 | 0.545 | 2.234 | 2.232 | 0.096 | 0.365 | 0.111 | 0.182 |
4 | 1.564 | 1.535 | 0.299 | 2.093 | 2.044 | 0.450 | 0.629 | 0.012 | 0.153 |
6 | 1.417 | 1.416 | 0.019 | 1.462 | 0.278 | 1.436 | 0.57 | 0 | 0.015 |
8 | 2.732 | 2.729 | 0.135 | 2.926 | 2.874 | 0.550 | 1.099 | 0 | 0.036 |
10 | 1.222 | 0.447 | 1.138 | 3.594 | 3.360 | 1.276 | 0.501 | 0.185 | 0.467 |
Положение | WE | WS2 | WS3 | εAB | εBC | ||
м/с2 | рад/с2 | ||||||
0 | 2.126 | 3.678 | 2.303 | 4.649 | 0 | ||
2 | 0.182 | 1.814 | 0.441 | 6.032 | 0.754 | ||
4 | 0.631 | 2.067 | 0.782 | 5.524 | 1.668 | ||
6 | 0.571 | 2.149 | 0.709 | 0.751 | 1.539 | ||
8 | 1.098 | 2.396 | 1.366 | 7.767 | 2.966 | ||
10 | 0 | 1.290 | 0.611 | 9,081 | 0.486 | ||
studfiles.net
План ускорений.
Определим вначале ускорение точки A кривошипа, который вращается с постоянной угловой скоростью по окружности радиуса lOA.
.
Это нормальное ускорение точки A вокруг точки O изображаем отрезком πа’, длину которого рекомендуется принимать в пределах 70…200/мм. В рассматриваемом примере πа’ имеет длину 70 мм. Масштаб плана ускорений
.
Так как ω1=const и 1=0, то ускорение точки A состоит только из нормального и вектор πa‘ направлен перпендикулярно звену АО от точки A к центру вращения О.
В группе Асcура (2,3) определяем ускорение внутренней точки B. Рассматривая вначале движение точки B совместно с точкой A и относительно неё, а затем движение точки B относительно точки D запишем два векторных уравнения:
Ускорения точек A и D известны (аD=0). Нормальные ускорения аВАи аВDопределим по формулам:
Вектор направлен параллельно звенуАВ от точки B к точке A; вектор – параллельно звенуDB от точки B к точке D. У векторов касательных (тангенциальных) ускорений известны только направления; /направлен перпендикулярно звену АВ, – перпендикулярноBD. Определим длины отрезков a‘n2 изображающего нормальное ускорение иπn3 изображающего .
Решаем векторные уравнения графически. В соответствии с первым векторным уравнением из точки a‘ откладываем отрезок a‘n2 и через точку n2 проводим линию, перпендикулярную шатуну AB. В соответствии со вторым уравнением из полюса π откладываем отрезок πn3 и через конец этого отрезка проводим линию перпендикулярно стороне BD коромысла BDC. На пересечении этих двух линий отмечаем точку b‘, соединив которую с полюсом получим вектор , изображающий в масштабеполное ускорение точкиВ. Соединив точки a‘ и b‘ получаем вектор , изображающий полное относительное ускорениеточкиВ относительно точки А. Используя принцип подобия в плане ускорений на отрезке πb‘ строим треугольник подобный треугольникуDBC. Соединив полюс с точкой c‘, получаем вектор полного ускорения точки C. Используя этот же принцип определим ускорения центров тяжести звеньев 2 и 3. Для этого достаточно соединить полюс π с точками ирасположенными соответственно в центрах тяжести отрезкаa‘b‘ и треугольника πb‘c‘.
В группе Ассура (3,4) известны ускорения точки c звена 3 и неподвижной точки Ех,расположенной на направляющей х-х и совпадающей в данный момент с точкой Е, принадлежащей ползуну. Запишем два векторных уравнения для внутренней точки группы Ассура, рассматривая её движение совместно с точкой C и относительно неё, а затем совместно с точкой Ех, принадлежащей направляющей и относительно этой точки:
.
В этих уравнениях вектор известен, ускоренияaExи aEExk равны нулю, т.к. направляющая х-х неподвижна. Величину нормального ускорения aECn точки Е относительно точки C определяем так же, как и в первой группе Ассура.
.
Вектор касательного ускорения точки Е относительно точки C направлен перпендикулярно звену СЕ, а относительное ускорение аЕЕх точки/E в движении по направляющей направлено параллельно этой направляющей х-х. Решаем векторные уравнения графически. В соответствии с первым уравнением, из конца вектора откладываем отрезок c‘n4, изображающий ускорение aECn. Длина этого отрезка
.
Отрезок c‘n4 проводим параллельно звену СЕ от точки E к точке C. Через точку n4 проводим линию, перпендикулярно звену СЕ.
В соответствии со вторым уравнением, учитывая, что два первых ускорения равны нулю, проводим через полюс π отрезок, параллельный направляющей х-х до пересечения с линией, проведенной перпендикулярно ВС из точки n4. Точка пересечения и есть искомая точка e‘, а вектор определяет ускорение ползуна 5. Положение точки S4 определяем по принципу подобия, поделив вектор полного относительного ускорения на две равные части. Проводим через полюс вектор ,определяющий ускорение центра тяжести шатунаСЕ. Из построенного плана ускорений определим ускорения точек.
Рис. 21 План ускорений механизма. μа= 0,156 м/с2·мм
Величины угловых ускорений ε2 ε3 ε4 звеньев 2,3 и 4 определим из уравнений:
Перенесем вектор касательного ускорения точкиB относительно точки A с плана ускорений в точку B плана механизма и пойдем направление углового ускорения ε2 звена АВ. В данном случае ε2 направлена против часовой стрелки. Аналогично походим направления ускорений ε3 и ε4. Поместим вектор , изображающий касательное ускорение в точку B плана механизма. Направление углового ускорения звена 3 так же, как и направление угловой скорости ω3 совпадает с направлением движения часовой стрелки. И, наконец, переносим вектор , изображающий ускорение в точку Е и определяем, что угловое ускорение звена 4 направлено против часовой стрелки. Сравнивая направления угловых скоростей и угловых ускорений, делаем вывод, что звенья 3 и 4 вращаются ускоренно, а звено 2 – замедленно.
studfiles.net
Построение планов скоростей и ускорений
Количество просмотров публикации Построение планов скоростей и ускорений – 1643
Лекция № 3
Планом скоростей (ускорений) называют рисунок, на котором в масштабе изображены векторы, равные по модулю и направлению скоростям (ускорениям) различных точек механизма в данный момент времени.
Планы скоростей и ускорений строятся по векторным уравнениям, которые составляются отдельно для каждой группы Ассура в порядке присоединения их к ведущему звену и к другим звеньям механизма.
Построение планов скоростей и ускорений рассмотрим на примере шарнирного четырехзвенника (рис.1, а).
Рис. 1. Построение планов скоростей и ускорений для шарнирного четырехзвенного механизма
Известными являются:
а) размеры звеньев , , ;
б) положение механизма;
в) закон движения ведущего звена .
Построение планов ведется в порядке построения механизма.
Для ведущего звена определяем величину скорости в точке :
. (3.1)
Вектор перпендикулярен радиусу, ᴛ.ᴇ. отрезку , и направлен в сторону, определяемую направлением .
Задаемся масштабом плана скоростей и вычисляем отрезок , изображающий в выбранном масштабе вектор ,
.
Из произвольной точки , называемой полюсом плана скоростей, откладываем в указанном направлении отрезок (рис. 1, б).
Составим векторные уравнения для группы Ассура . Точка принадлежит звеньям и , в связи с этим
, (3.2)
.(3.3)
В нашем случае уравнение (3.2) превращается в тождество, т.к. скорость точки равна нулю, в связи с этим обходимся одним уравнением (3.2).
Скорость точки известна по направлению: так как точка движется по окружности радиусом , то она перпендикулярна радиусу –, величина ее нам неизвестна. Скорость точки относительно точки также известна по направлению – . Величина ее нам неизвестна.
Решая векторное уравнение графическим способом, получим план скоростей, т.к. векторное уравнение эквивалентно двум скалярным уравнениям.
В соответствии с векторным уравнением (3.2) через конец вектора (точку ) проводим направление вектора , а через полюс – направление вектора . Пересечение этих направлений (точка ) определяет отрезки ] и , изображающие в выбранном масштабе скорости соответственно и . Величины этих скоростей равны:
;
.
Пользуясь построенным планом скоростей, можно определить угловые скорости звеньев и :
;
.
Для определения направления переносим вектор в точку механизма и рассматриваем движение этой точки относительно точки по направлению скорости . Из рисунка видно, что направлена против часовой стрелки.
Аналогично определяем направление угловой скорости . Перенеся вектор в точку, видно, что направлена по часовой стрелке.
Построим план ускорений. Ускорение точки состоит только из нормального ускорения, т.к. звено движется равномерно и оно равно
= = (3.4)
Вектор направлен по радиусу к центру – от точки к точке .
Задаемся масштабом плана ускорений и вычисляем длину отрезка , изображающего вектор в данном масштабе.
.
Из произвольной точки , называемой полюсом плана ускорений, в направлении вектора откладываем отрезок (рис.,).
Переходим к группе Ассура .
Векторные уравнения для точки группы имеют вид:
= + , (3.5)
= + . (3.6)
Так как точка неподвижна, то ее ускорение равно нулю и уравнение (3.6) превращается в тождество. По этой причине можно ограничиться только уравнением (3.5).
Ускорения и слагаются из нормальных и касательных составляющих:
= + , (3.7)
= + (3.8)
Подставляя значения и в уравнение (3.5), получим
+ = + + (3.9)
В уравнении (3.9) три вектора известны полностью – и по величине и по направлению, а два – только по направлению:
ускорение по величине равно
= ¤ , (3.10)
вектор направлен вдоль звена от точки к точке – оси вращения звена;
вектор направлен перпендикулярно звену ;
ускорение известно полностью;
ускорение по величине равно
= / ,(3.11)
направлен вектор вдоль звена АВ от точки к точке ;
вектор направлен перпендикулярно звену .
Построим план ускорений. Согласно правой части уравнения (3.9), из конца вектора , (отрезка ) откладываем в масштабе в указанном выше направлении вектор , представляемый отрезком , который вычисляется по формуле
= / .
Из конца вектора (точки ) проводим направление вектора ().
Согласно левой части уравнения (3.9) из полюса плана ускорений откладываем в указанном ранее направлении вектор , изображаемый отрезком , который вычисляется по формуле
= / mа .
Из конца вектора (точки) проводим направление вектора (^ ). Пересечение направлений и (точка ) дает решение векторного уравнения: отрезок изображает вектор , а отрезок – вектор . Величины этих ускорений равны:
= ×mа; = × mа.
Складывая векторы и , ᴛ.ᴇ. соединяя точку с точкой , получим отрезок , который изображает вектор полного ускорения точки – .
Складывая векторы и , ᴛ.ᴇ. соединяя точки и , получим отрезок, который изображает вектор ускорения точки – .
Величины этих ускорений равны:
= × mа; = × mа.
Определяем угловые ускорения звеньев и :
e2 = / ; e3 = / .(3.12)
Для определения направления этих ускорений переносим векторы и в точку механизма. Рассматривая движение точки относительно точки в направлении ускорения , устанавливаем, что e2 направлено против часовой стрелки. Рассматривая движение точки относительно точки в направлении , устанавливаем, что e3 также направлено против часовой стрелки.
Векторы абсолютных скоростей и ускорений точек всегда направлены от полюса к данным точкам.
Векторы относительных скоростей и ускорений каких – либо точек всегда соединяют концы векторов соответствующих абсолютных скоростей и ускорений и также направлены к данной точке.
referatwork.ru
Методические указания по выполнению контрольной работы, страница 2
Кинематическая схема механизма предназначена для определения положений, траекторий, скоростей и ускорений точек и звеньев механизма. Для построения кинематических схем используются условные обозначения согласно ГОСТ 2770 – 68.
Планы положений механизма строятся методом засечек в масштабе (рис.2). В отличие от масштабов, применяемых в машиностроении, в теории механизмов и машин масштабы представляют собой именованные числа. Масштабы обозначаются буквой К с соответствующим индексом:
Масштабы длин и пути , м /мм;
Масштаб скоростей , м/с.мм;
Масштаб ускорений , м/с2.мм.
Численное значение масштаба должно быть либо десятичной дробью, либо целым числом и включать в себя стандартные цифры или комбинации цифр: 1, 2, 4, 5, 15, 25, 75, 10, 20…….
Для выполнения кинематического анализа данного механизма в задаче № 1 требуется вычертить в выбранном масштабе Кs положение механизма изображенное в задании и для него построить план скоростей и ускорений
1.2.2. Построение планов скоростей и ускорений
Метод построения планов скоростей и ускорений основан на теореме о разложении движения, согласно которой любое движение можно представить как сумму двух простых движений – переносного /поступательного/ и относительного /вращательного/. Тогда для скоростей:
для ускорений:
,
где – нормальная составляющая ускорения в относительном движении /определяется по данным плана скоростей/, на плане ускорений всегда направлена вдоль звена к центру относительного движения;
– касательная составляющая /определяется графически/ на плане ускорений, всегда направлена перпендикулярно к звену /радиусу/ относительного движения.
Для определения скорости или ускорения точки графическим путем не-обходимо составить систему из двух векторных уравнений. При составлении векторных уравнений движение точки рассматривается относительно двух других точек, с которыми эта точка связана и скорости которых уже известны.
Пример:
Построить план скоростей и план ускорений для заданного положения механизма, изображенного на рисунке 2.
Пусть заданы размеры звеньев механизма: ОА = 150мм; АВ = 450мм и т.д. и частота вращения входного звена / кривошипа/ОА/, соответствующая n = 200 об/мин.
План скоростей рис.3.
Скорость пальца кривошипа /точка А/ определяется по формуле:
,
где n – частота вращения кривошипа, об/мин;
ОА – длина кривошипа, м;
Подставляя данные в формулу, получим:
Задаваясь длиной отрезка /мм/, изображающего на плане скоростей вектор скорости точки А, получим масштаб плана :
Отрезок :
= 62,8 мм
выбран так, чтобы был получен стандартный масштаб скоростей.
Рекомендуется выбирать отрезок не менее 50мм.
Из полюса плата скоростей р отложим вектор скорости точки А перпендикулярно звену ОА/ по касательной к траектории движения точки А/ в сторону ее движения.
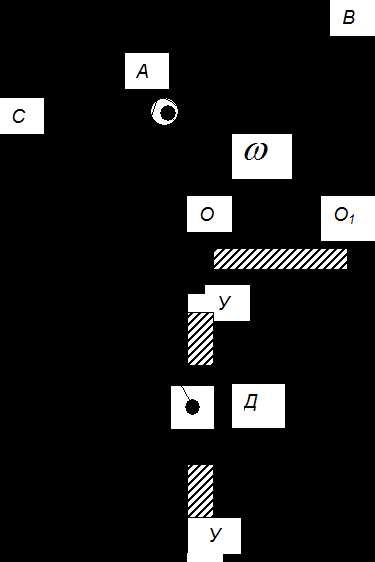
Рис.2. План механизма
КS=………………м/мм
.
Рис.3. План скоростей
КV…………………….м/с*мм
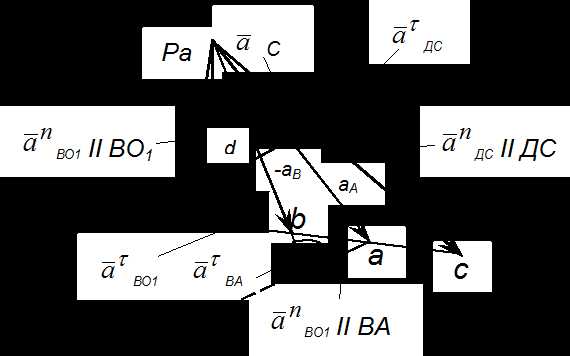 Рис.4. План ускорений
Рис.4. План ускорений
Кa……………………………м/с2мм
Рассматривая движение точки В относительно точки А, а затем относительно ОI, имеем:
Из конца вектора скорости /точка а/ проводим линию действия вектора относительной скорости перпендикулярно звену АВ, а затем из полюса p /т.к. V0 = 0/ перпендикулярно звену ВОI проводим линию действия вектора относительной скорости до пересечения с линией действия вектора в точке в. Отрезокизображает вектор абсолютной скорости точки В .
Скорость точки С /третьей точки звена ВАС/ найдем методом подобия. Можно записать следующее соотношение:
или ,
где и – отрезки на плане скоростей;
АС и АВ – размеры звеньев механизма.
Вычислив отрезок и отложив его на плане скоростей, получим точку . Соединяя точку с полюсом , найдем отрезок , изображающий вектор абсолютной скорости точки С (Vc).
Для определения скорости точки Д рассмотрим движение этой точки относительно точек С и Ду / точка Ду принадлежит неподвижным направляющим и в данный момент совпадает с точкой Д /.
Система векторных уравнений имеет вид:
Так как VДУ =0, то .
Из конца вектора скорости точка с / проводим линию действия вектора относительной скорости перпендикулярно звену СД, а из полюса p параллельно оси у-у проводим линию действия вектора относительной скорости в точке d . Отрезок изображает вектор абсолютной скорости точки Д .
Абсолютные скорости каждой точки равны:
VВ = , м/с
VС = , м/с
VД = , м/с
Относительные скорости:
VВА =
=
VДС =
План ускорений рис.4.
Рассматривая движение точки А относительно точки О, можно записать:
Ускорение ао = 0, т.к. сonst. Следовательно, точка А при постоянной угловой скорости кривошипа будет иметь только нормальное / центральное/ ускорение:
Величина нормального ускорения:
Подставляя числовые значения, получим:
Задаваясь длиной отрезка изображаемого на плане ускорений вектор ускорения точки А, получим масштаб плана ускорений
Отрезок выбран равным 65,8 мм, чтобы получить стандартный масштаб ускорений.
Из полюса плана ускорений откладываем вектор ускорения точки А
/отрезок / параллельно звену АО, направляя его от точки А к центру ее вращения – точке О.
Рассматривая движение точки В относительно точки А, а затем относительно точки О1, имеем:
Так как то .
Нормальное ускорение В в ее относительном движении относительно точки А по величине определяется следующим образом:
Удобнее сразу находить величину отрезка, изображаемого вектор нормального ускорения:
где – отрезок, изображений вектор относительной скорости на плане скоростей, мм;
АВ – длина шатуна, м.
Направлен вектор по шатуну от точки В к точке А.
Вектор касательного ускорения известен только по направлению – линия его действия перпендикулярна звену ВА.
Нормальное ускорение:
vunivere.ru