
История кинематики. Основные понятия кинематики
История кинематики. Основные понятия кинематики
Оглавление
Введение
1. История кинематики
.1 Учения Аристотеля
.2 Учения Галилео Галилея. Опыт на Пизанской башне
.3 Вложения Пьера Вариньона в учения о кинематике
.4 Учёные выделившие отдельный раздел механики
. Основные понятия кинематики
Заключение
Литература
Введение
Долгое время понятия о кинематике были основаны на работах Аристотеля, в которых утверждалось, что скорость падения пропорциональна весу тела, а движение в отсутствие сил невозможно. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей. Изучая свободное падение (знаменитые опыты на Пизанской башне) и инерцию тел, он доказал неправильность идей Аристотеля. Итоги своей работы по данной теме он изложил в книге «Беседы и математические доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению».
Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде.
Актуальность темы: Изучая такую ветвь науки, как кинематика, многие учащиеся даже не задумываются о истории её возникновения. Но зная историю её открытия, ошибки и знаменитые опыты в ходе которых была открыта кинематика, учащемуся будет намного легче ознакомится с основными понятиями кинематики.
Цель: Изучить историю открытия кинематики.
Задачи:
. Познакомиться с учёными, изучающих раздел кинематики.
2. Выявить опыты и исследования, в ходе которых была открыта кинематика.
3. Ознакомиться с основными понятиями кинематики.
1. История кинематики
.1 Учения Аристотеля
Аристотель – древнегреческий учёный, философ и педагог, родился в Стагире в 383? до н.э., умер в Халкиде в 322 до н.э. Почти двадцать лет Аристотель учился в Академии Платона и, по-видимому, какое-то время там преподавал. Покинув Академию, Аристотель стал воспитателем Александра Македонского. Как основатель Ликея в Афинах, продолжавшего свою деятельность многие столетия после его смерти, Аристотель внес существенный вклад в античную систему образования. Он задумал и организовал широкомасштабные естественнонаучные изыскания, которые финансировал Александр. Эти исследования привели ко многим фундаментальным открытиям
Долгое время понятия о кинематике были основаны на работах Аристотеля. Аристотель понимает под движением любое количественное или качественное изменение, благодаря которому явление реализуется. Такое широкое понимание движения позволяет ему утверждать, что в природе все есть движение. Частному понятию изменения положения тела с течением времени он дал наименование локального движения, а локальные движения он разделял на естественные и насильственные, тем самым отрицая непрерывность явлений и их однородность и вводя зависимость от того, происходят ли эти движения по естественным или по случайным причинам. Естественные движения бывают прямолинейными, как, например, те движения, которые мы постоянно видим вокруг себя (падение тяжелых тел, подъем легких тел), или круговыми, подобно круговращению звезд. Регулярность и вечность круговращения звезд должны иметь какую-то причину, которую Аристотель усматривал в неподвижном перводвигателе, сообщающем движение всем сферам, к которым прикреплены звезды и центр которых совпадает с центром Земли. Если представление о неподвижном перводвигателе было понятием, безусловно, метафизическим и даже теологическим, то помещение Земли в центре мироздания соответствовало данным повседневного опыта, который показывал, что звезды обращаются вокруг Земли.
Данным грубых наблюдений соответствуют также законы Аристотеля для естественного движения тел в подлунном мире. Из повседневного опыта известно, что есть тела, которые падают вниз, и тела, которые возносятся вверх (например, дым или огонь). Отсюда делается заключение, что тяжелые тела, естественно, стремятся к «своему месту», находящемуся в центре Земли, а легкие стремятся ввысь, к граничной поверхности мировой сферы. Во всех случаях все тела, тяжелые или легкие, стремятся к своему естественному месту. По Аристотелю, траектория ядра или брошенного тела состоит из трех частей: первая часть – прямолинейная наклонная, третья – прямолинейная вертикальная, а вторая – круговая, соединяющая первую с третьей. Эта точка зрения продержалась вплоть до 1546 г.
Вытекающая отсюда динамика весьма непохожа на современную. В учениях Аристотеля движущееся тело непрерывно находится под действием некоторой силы, и скорость его прямо пропорциональна приложенной силе и обратно пропорциональна сопротивлению среды. Отсюда следует, что в пустоте, где сопротивление среды отсутствует, скорость стала бы бесконечно большой, т.е. тело приобрело бы свойство вездесущности. Это следствие настолько противоречит обычным представлениям, что Аристотель приходит к выводу о невозможности существования пустоты в природе.
1.2 Учения Галилео Галилея. Опыт на Пизанской башне
Галилео Галилей (1564-1642) – итальянский физик, механик, астроном, философ и математик, оказавший значительное влияние на науку своего времени. Галилей – основатель экспериментальной физики. Своими экспериментами он убедительно опроверг умозрительную метафизику Аристотеля и заложил фундамент классической механики. Галилей доказал, что тяжелые предметы падают вниз так же быстро, как и легкие. Чтобы проверить предположение Галилео Галилей сбрасывал с Пизанской башни в один и тот же момент пушечное ядро массой 80 кг и значительно более легкую мушкетную пулю массой 200 г. Оба тела имели примерно одинаковую обтекаемую форму и достигли земли одновременно.
Такова легенда. В архивах не сохранилось никаких подтверждений, что такой эксперимент действительно проводился. Более того, пушечное ядро и пуля имеют разный радиус, на них будет действовать разная сила сопротивления воздуха и, поэтому, они не могут достичь земли одновременно. Это понимал и Галилей. Однако он писал, что «…различие в скорости движения в воздухе шаров из золота, свинца, меди, порфира и других тяжелых материалов настолько незначительно, что шар из золота при свободном падении на расстоянии в одну сотню локтей наверняка опередил бы шар из меди не более чем на четыре пальца. Сделав это наблюдение, я пришел к заключению, что в среде, полностью лишенной всякого сопротивления, все тела падали бы с одинаковой скоростью.» Предположив, что произошло бы в случае свободного падения тел в вакууме, Галилей вывел следующие законы падения тел для идеального случая:
. Все тела при падении движутся одинаково: начав падать одновременно, они движутся с одинаковой скоростью
. Движение происходит с постоянным ускорением.
1.3 Вложения Пьера Вариньона в учения о кинематике
Пьер Вариньон – французский математик, член Парижской Академии наук, профессор математики коллежа Мазарини.
Основной вклад Вариньон совершил в статику и механику; кроме того, его труды посвящены анализу гидромеханике. Вариньон был самым первым пропагандистом дифференциального исчисления во Франции. В 1687 году в своей работе «Проект новой механики…» Вариньон дал точную формулировку закона параллелограмма сил, развил понятие момента сил. В работе «Новая механика или статика, проект которой был дан в 1687» Вариньон дал систематическое изложение учения о сложении и разложении сил, о моментах сил и о правилах оперирования ими.
Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде, как говорилось раньше П. Вариньон первый пропагандист такого вида исчисления. Однако содержания выступления учёного до конца не установлено.
1.4 Ученые, выделившие отдельный раздел механики
кинематика аристотель механика вариньон
Хочется отметить, что не только Аристотель, Г. Галилей и П. Вариньон были заинтересованы кинематикой. Эти великие учёные только «прокладывали» путь к возникновению этой ветви механики. Но тогда кто же «отделил» кинематику и дал ей такое название?
Первые книги о механизмах появились в XV в. В середине XVIII в. создана теоретическая база. Французский ученый Жан Даламбер в своей книге «Динамика» (1743) высказал мысль, что механику надо изучать с движения как такового. Эту мысль развил петербургский академик Леонард Эйлер в знаменитой «Теории движения твердых тел». Он считал целесообразным разделить исследование движения твердого тела на две части: геометрическую и механическую. Перемещение точек тела надо исследовать, не рассматривая причин движения, для получения аналитических формул, определяющих перемещение. Выделяется, таким образом, чисто геометрический аспект проблемы, и это, естественно, дает методические преимущества, упрощая подходы и поиски решения. Еще более определенно идея выделения кинематики сформулирована выдающимся деятелем Великой французской революции Л. Карно. Он писал: «Геометрия могла бы включить в себя движения, не связываемые с взаимодействием тел, ибо механика, собственно говоря, не наука о движении, а наука о сообщении движения… Не движение само по себе является предметом механики, а эффект видоизменений, которым оно подвергается» Наконец, у великого французского ученого Андре Мари Ампера появилось понятие «кинематика»: «Наука, которая рассматривает сами по себе движения, наблюдаемые нами в окружающих телах и, особенно, в устройствах, называемых машинами, я называю кинематикой…».
В «Опыте философии наук» Ампер утверждал, что кинематика должна быть и частью теоретической, механики, приклад ной дисциплиной, в которой изучаются разнообразные механизмы.
Впервые раздел кинематики был четко выделен в курсе «Физической и экспериментальной механики» генерала Понселе, который читал его в Парижском университете с 1837 по 1848 г. Здесь рассматривались виды движений, сложение движений, скоростей и ускорений, и после этого различного типа механизмы.
В итоге кинематика выделилась в качестве раздела теоретической механики.
2. Основные понятия кинематики
Кинематика (греч. ?????? – двигаться) в физике – раздел механики, в котором движение тел рассматривается без выяснения причин, его вызывающих. Задача кинематики состоит в том, чтобы дать методы математически строгого, количественного, описания движения любых тел и установить взаимосвязи между величинами, характеризующими движение.
Механическим движением тела называют изменение его положения в пространстве относительно других тел с течением времени.
Механическое движение относительно <#”40″ src=”doc_zip1.jpg” />
(координатный способ), либо при помощи зависимости от времени радиус-вектора (векторный способ), проведенного из начала координат до данной точки (рис. 1).
Рис. 1 Определение положения точки
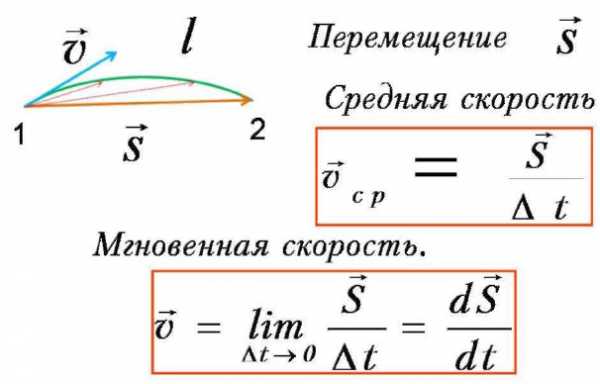
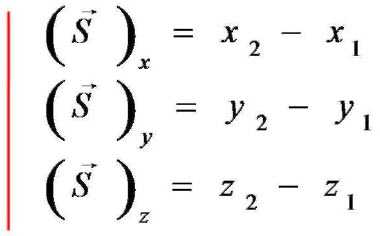
Перемещением тела называют направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением. Перемещение – векторная величина.
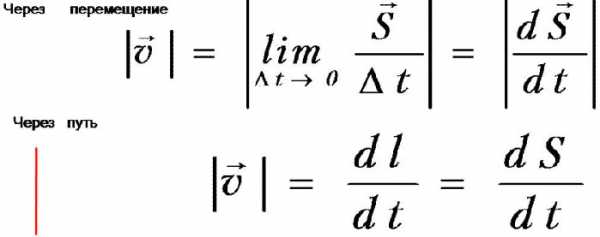
Пройденный путь l равен длине дуги траектории, пройденной телом за некоторое время t. Путь – скалярная величина.
Если движение тела рассматривать в течение достаточно короткого промежутка времени, то вектор перемещения окажется направленным по касательной к траектории в данной точке, а его длина будет равна пройденному пути. В случае достаточно малого промежутка времени ?t пройденный телом путь ?l почти совпадает с модулем вектора перемещения При движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути (рис.2).
Рис. 2 Пройденный путь
Для характеристики движения вводится понятие средней скорости:
В физике наибольший интерес представляет не средняя, а мгновенная скорость, которая определяется как предел, к которому стремится средняя скорость на бесконечно малом промежутке времени ?t:
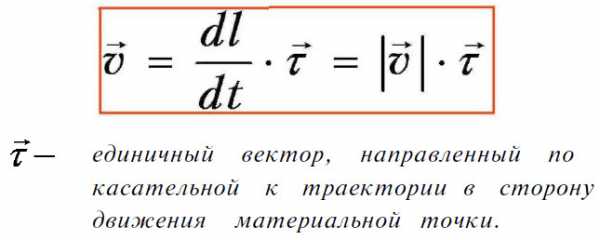
Мгновенная скорость тела в любой точке криволинейной траектории направлена по касательной к траектории в этой точке.
При движении тела по криволинейной траектории его скорость изменяется по модулю и направлению. Изменение вектора скорости за некоторый малый промежуток времени ?t можно задать с помощью вектора . Мгновенным ускорением (или просто ускорением) тела называют предел отношения малого изменения скорости к малому промежутку времени ?t, в течение которого происходило изменение скорости:
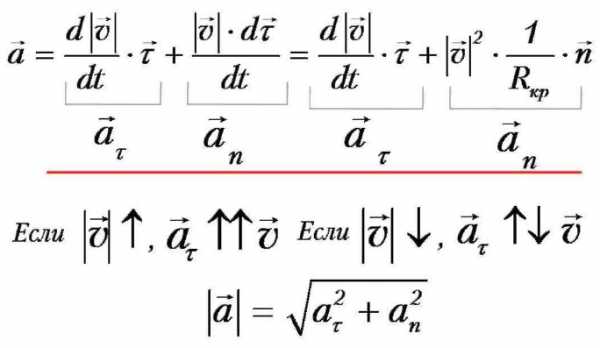
Направление вектора ускорения в случае криволинейного движения не совпадает с направлением вектора скорости. Составляющие вектора ускорения называют: касательным (тангенциальным) и нормальным ускорениями.
Касательное ускорение указывает, насколько быстро изменяется скорость тела по модулю:
Вектор направлен по касательной к траектории.
Нормальное ускорение указывает, насколько быстро скорость тела изменяется по направлению. Криволинейное движение можно представить, как движение по дугам окружностей (рис. 3).
Рис. 3 Движение по дугам окружностей
Нормальное ускорение зависит от модуля скорости ? и от радиуса R окружности, по дуге которой тело движется в данный момент:
Вектор всегда направлен к центру окружности. Модуль полного ускорения равен:
Заключение
История кинематики долга и интересна. Ещё с древних времён, Аристотель работал над ней. Прежде, чем получить полное представление о механики было сделано множество ошибок и проведено множество опытов. Зная небольшую предысторию кинематики, учащемуся будет намного легче ознакомиться с её основными понятиями.
Основными физическими величинами в кинематике материальной точки являются пройденный путь l, перемещение , скорость и ускорение . Путь является скалярной величиной. Перемещение, скорость и ускорение – величины векторные. Чтобы задать векторную величину, нужно задать ее модуль и указать направление. Векторные величины подчиняются определенным математическим правилам. Вектора можно проектировать на координатные оси, их можно складывать, вычитать и т. д.
Таким образом, кинематика важнейшая ветвь механики с дифференциальным исчислением и своей историей открытия.
Литература
1.«Физика: учебное пособие для 9-го класса» Л.А. Исаченкова, Г.В. Пальчик, А.А. Сокольский – Минск: Народная асвета, 2010;
.«Общий курс физики. Механика» Сивухин Д. – Москва: МФТИ, 2005;
.ru.wikipedia.org
.www.eduspb.com/node/1830
.www.physics.ru
diplomba.ru
Введение………………………………………………………….4
Содержание
Кинематика……………………………………………………………………………..5
Основные формулы………………………………………………………5
Примеры решения задач…………………………………………………6
Динамика поступательного движения ………………………………….….11
Основные формулы……………………………………………………..11
Примеры решения задач………………………………………………..12
Механика твёрдого тела ………………………………………………………..…20
Основные формулы……………………………………………………..20
Примеры решения задач………………………………………………..22
Механические колебания и волны …………………………………………….29
Основные формулы……………………………………………………..29
Примеры решения задач………………………………………………..32
Список литературы……………………………………………………..38
Введение
Практические занятия являются одной из важнейших компонент учебного процесса по физике. Они способствуют приобщению студентов к самостоятельной работе, учат анализировать изучаемые физические явления, использовать на практике полученные теоретические знания.
Предназначены для студентов, изучающих раздел курса общей физики «Механика». В методических указаниях представлены примеры решения типичных задач разной степени трудности. Решения сопровождаются необходимыми примерами и комментариями. Задачи систематизированы по основным темам раздела. По каждой теме приведены основные формулы, облегчающие усвоение алгоритмов решения задач.
1. Кинематика Основные формулы
Средняя скорость тела за промежуток времени Δt определяется отношением перемещения тела Δr к промежутку времени Δt:
где  – радиус–вектор начальной точки,
– радиус–вектор начальной точки, – конечной.
– конечной.
Средний модуль скорости тела за промежуток времени Δ
 .
.
Средним ускорением называется отношение изменения скорости ко времени, за которое оно произошло:
 .
.
Мгновенная
скорость  равна производной радиус-вектора точки
по времени
равна производной радиус-вектора точки
по времени 
и
направлена по касательной к траектории;
для прямолинейного движения  ,
,
ускорения  .
.
Кинематические соотношения для прямолинейного равнопеременного движения:
,
 ,
,
где υ0 скорость тела в момент времени t = 0, a – ускорение тела.
При криволинейном движении полное ускорение тела раскладывается на нормальную и тангенциальную к траектории составляющие: .
Тангенциальная
составляющая ускорения определяет
изменение модуля скорости:  ,
,
нормальная – изменение направления скорости:
 ,
,
где R–радиус кривизны траектории, нормальное ускорение направлено к центру кривизны траектории.
Модуль полного ускорения:
.
При движении по окружности кинематическими характеристиками являются:
– угол поворота φ,
– угловая
скорость ω
=  ,
,
– угловое
ускорение ε =  =
= .
.
Кинематические уравнения для вращательного равнопеременного движения:
 ε t
ε t
φ
= ω0 t + ε
где ω0 – угловая скорость в момент времени t=0, – угловое ускорение.
Линейные и угловые параметры движения связаны соотношением: υ = ω R, aτ = ε R.
studfiles.net
Примеры решения задач по кинематике криволинейного движения. Приведите, пожалуйста, примеры из жизни криволинейного движения
Механика – часть физики, которая изучает одну из простейших и наиболее общих форм движения материи, называемую механическим движением.
Механическое жвижение есть изменение положения одного тела относительно другого, условно принятого за неподвижное, с течением времени.
Привести примеры мех. движения.
Механическое движение всегда присутствует в других, более сложных формах движения материи как составная, но не исчерпывающая их часть.
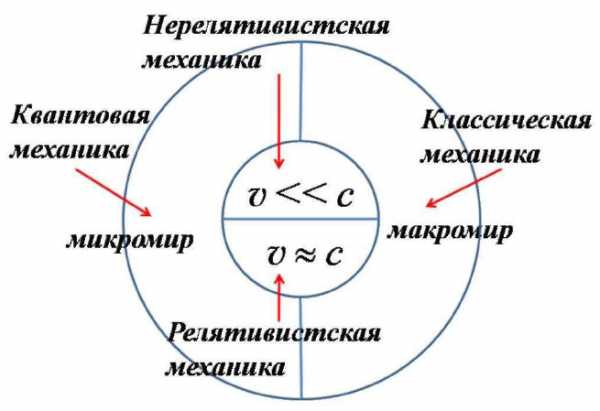
Законы классической механики и всевозможные следствия из них применимы лишь к движениям макротел, движущимся с малыми по сравнению со скоростью света в вакууме скоростями. Ограниченность классической механики объсняется тем, что она была создана на основе изучения макродвижений с малыми скоростями. Квантовая механика изучает движение микротел, релятивистская механика – движение тел с большими скоростями.
Основная задача механики состоит в том, чтобы, зная
Механическое движение тела будет известно, если известно движение всех его частиц. Поэтому прежде всего следует изучить движение так называемой материальной точки – тела, обладающего конечной массой, но пренебрежительно малыми размерами. В природе реальных материальных точек не существует. Понятие материальной точки есть научная абстракция. Вводя это понятие, мы абстрагируемся от всех несущественных для данного движения свойств тела, таких как, например, его размеров, строения, изменений внутреннего строения.
Т.о., всякое тело можно считать материальной точкой, если, во- первых, проходимые им расстояния велики по сравнению с его размерами и, во- вторых , если форма и размеры тела не оказывают существенного влияния на характер движения его как целого.
Введение понятия материальной точки оказывается весьма пелезным и при рассмотрении протяженных тел. В этом случае мысленно расчленяют протяженное тело на отдельные части, движение которых можно рассматривать как дви- жение материальных точек. Зная движение всех этих материальных точек, мы тем самым будем знать и движение всей их совокупности, т.е.
Положение движущегося тела в пространстве можно определить лишь относительно некоторого определенного другого тела, наз. телом отсчета, которое условно считается неподвижным. Определить положение точки или тела «по отношению к пустому пространству» невозможно и физически бессмысленно. Связывая с телом отсчета произвольную систему координат, мы получим систему отсчета положений материальной точки. Система отсчета должна быть хронометрирована , т.е. снабжена «часами», с помощью которых однозначно определяются моменты времени.
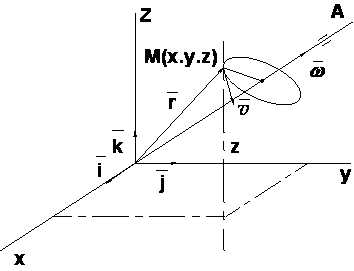
Простейшей системой отсчета явл. прямоугольная система координат OXYZ (декартова), рис. 1. Положение точки М в этой системе координат характеризуется тремя координатами: X,Y,Z.
Рис.1. Прямоугольная система координат.
Сферическая система коордтнат: М(r,,).
Существуют и другие системы координат: цилиндрическая, полярная.
Во всех случаях при различном выборе системы отсчета радиус вектор r (векторный метод описания) и положение точки в пространстве (координатный метод) характеризуются количественно тремя числами, которые могут изменяться независимо друг от друга. Это является математическим отражением того факта, чтопространство трехмерно.
Если тело не испытывает воздействия со стороны других тел, то оно называется свободно движущимся телом.
Если в качестве системы отсчета выбрать систему, связанную с каким–либо свободно движущимся телом, то в такой системе свободное движение других тел происходит прямолинейно и равномерно (с постоянной по величине и направлению скоростью). Это утверждение составляет содержание закона инерции , впервые открытого Галилеем. Система отсчета, связанная со свободно движущимся телом, наз. инерциальной системой отсчета. Закон инерции наз. также первым законом Ньютона.
Если некоторая система движется по отношению к инерциальной системе с постоянной (по величине и направлению) скоростью, то она также будет инерциальной.
Все физические явления протекают одинаково в различных инерциальных системах отсчета, которые являются, таким образом, физически неотличимыми друг от друга или эквивалентными. Поэтому все физические явления изучаются в инерциальных системах отсчета. Этот закон называется принципом относительности.
Наиболее обычной является система отсчета связанная с земным шаром. Эта система не явл. инерциальной в силу суточного вращения Земли вокруг своей оси и кругового движения вокруг Солнца. Эти скорости движения Земли неодинаковы и непостоянны, поэтому эта система – неинерциальна. Однако при этом мы делаем весьма небольшую ошибку, несущественную для целого ряда физических экспериментов, принимая «земную» систему отсчета в качестве инерциальной.
Поскольку три величины, характеризующие положение точки в пространстве, взаимно независимы, говорят, что мат. точка обладает тремя степенями свободы. (Дать определеление ст.свободы).
Если материальная точка движется, то ее координаты с течением времени изменяются, т.е. величины X,Y,Z и радиус вектор r являются функциями времени:
Функции времени, определяющие координаты движущейся точки в любой заданный момент времени, называются кинематическимзаконом движения.
Действительно, задавая тот или иной определенный момент времени, всегда можно в результате подстановки его конкретного численного значения в (1) определить все три координаты движущейся точки, соответству
tmzs.ru
Лекция 3. Кинематика твердого тела.
3. Кинематика твердого тела.
Поступательное и вращательное движение твердого тела.
1. Поступательное движение твердого тела.
2. Вращение твердого тела вокруг неподвижной оси.
3. Скорости и ускорения точек вращающегося твердого тела.
4. Векторные выражения вращательной скорости, вращательного и центростремительного ускорений. Формулы Эйлера.
Задача кинематики твердого тела делится на две части:
– Задание движения и изучение кинематических характеристик
всего тела в целом;
– Изучение движения каждой из точек тела в отдельности.
1. Поступательное движение твердого тела
Поступательным называется такое движение твердого тела, при котором любая прямая проведенная в этом теле, перемешается, оставаясь параллельной самой себе.
Поступательное движение не значит прямолинейное:
ТЕОРЕМА: при поступательном движении все точки тела описываютодинаковые (при наложении совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения.
|
|
(3. 1) (3. 2)
|
2. Вращение твердого тела вокруг неподвижной оси.
Вращательнымназывается такое движение твердого тела, при котором во все время движения какие-либо две точки тела остаются неподвижными (проходящая через эти неподвижные точки прямая называется осью вращения), а все остальные точки описывают траектории, представляющие собой окружности, плоскости которых перпендикулярны к оси вращения, а центры лежат на этой оси.
|
|
φ = f (t) (3. 3) |
|
|
|
|
или (3. 4) |
|
|
или (3. 5)
|
Примеры:
|
Равномерное вращение (ω = const) |
Равнопеременное вращение (e= const) |
|
dj = wdt j=wt w = j/t |
|
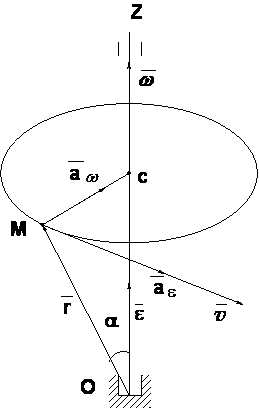
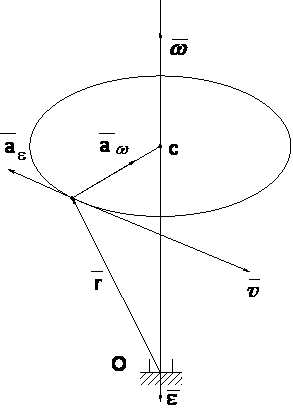
3. Скорости и ускорения точек вращающегося твердого тела
|
|
Вращательная скорость точки
v = R ω (3. 6)
|
Модуль вращательной скорости точки твердого тела равен произведению расстояния от точки до оси вращения на угловую скорость тела
Ускорение точки
|
или (3.7) – вращательное ускорение (3.8) – центростремительное ускорение
(3.9) – полное ускорение
(3.10)
|
4. Векторные выражения вращательной скорости, вращательного и центростремительного ускорений.
Формулы Эйлера.
|
|
(3.12)
– формулы Эйлера
|
Векторные выражения вращательного и центростремительного ускорения точки
– полное ускорение точки
– вращательное ускорение точки
– центростремительное ускорение точки
|
|
|
- < Назад
- Вперёд >
Добавить комментарий
student-com.ru
Основы кинематики
ЛЕКЦИЯ 1ОСНОВЫ КИНЕМАТИКИ
1.1. Основные понятия и определения
Механикой называют раздел физики, посвященный изучению закономерностей простейшей формы движения материи – механического движения. Механическое движение состоит в изменении с течением времени взаимного расположения тел или их частей в пространстве.
Совокупность тела отсчета и связанных с ним координат и синхронизированных между собой часов образует систему отсчета.
Для описания механического движения обычно используется простейшая модель тела – материальная точка. Материальной точкой называют тело, формой и размерами которого в данной задаче можно пренебречь. Например, изучая движение Земли и других планет по орбитам вокруг Солнца, их рассматривают как материальные точки, т. к. линейные размеры планет пренебрежимо малы по сравнению с линейными размерами их орбит.
Опыт показывает, что, пока скорости тел малы по сравнению со скоростью света, линейные масштабы и промежутки времени остаются неизменными при переходе от одной системы отсчета к другой, т. е. не зависят от выбора системы отсчета. Это нашло свое выражение в ньютоновской концепции абсолютности пространства и времени. Механику, изучающую движения тел именно в этих случаях, называют ньютоновской.
При переходе же к скоростям, сравнимым со скоростью света, обнаруживается, что характер движения тел полностью изменяется. Линейные масштабы и промежутки времени уже зависят от выбора системы отсчета и в разных системах отсчета будут разными. Механику, основанную на этих представлениях, называют релятивистской. Естественно, что релятивистская механика является более общей и в частном случае малых скоростей переходит в классическую.
^
Кинематика – это раздел механики, где изучаются способы описания движений независимо от причин, обусловливающих эти движения. Существует три способа описания движения материальной точки: векторный, координатный и естественный.
^ . В этом способе положение точки А задают радиусом-вектором проведенным из некоторой неподвижной точки ^ выбранной системы отсчета в точку М (рис. 1.1). При движении точки M ее радиус-вектор меняется в общем случае как по модулю, так и по направлению, т. е. радиус-вектор точки M зависит от времени t. Геометрическое место точек, соответствующих окончанию радиуса-вектора , называют траекторией точки М.
Зависимость называется кинематическим законом движения материальной точки.
Скорость и ускорение. Для характеристики движения материальной точки вводят векторную величину – скорость, определяющую как быстроту перемещения в пространстве, так и направление движения в данный момент времени. Пусть в момент времени t точка находится в положении 1 и характеризуется радиусом-вектором , а в момент времени t + t переместилась по дуге на расстояние s в положение 2 с радиусом-вектором (рис. 1.2). Средним вектором скорости движения называют величину отношения
.
Р
ис 1.2
Мгновенной скоростью в момент времени t называется предел отношения вектора перемещения к интервалу времени, за которое это перемещение произошло, т. е.
. (1.1)
Это значит, что вектор скорости материальной точки в данный момент времени равен производной от радиуса-вектора по времени и направлен по касательной к траектории в данной точке в сторону движения (как и вектор ).
Движение точки также характеризуется ускорением , которое определяет быстроту изменения вектора скорости движения точки со временем
, (1.2)
т. е. равно производной от вектора скорости по времени. Направление вектора совпадает с направлением приращения вектора скорости за время dt.
В системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр на секунду (м/с) и метр на секунду в квадрате (м/с2).
Из формул (1.1) и (1.2) путем интегрирования можно найти и
где и – значения радиуса-вектора и вектора скорости в начальный момент времени t = 0. Эти значения называются начальными условиями.
Координатный способ.. Радиус-вектор точки в момент времени t можно выразить через эти координаты
(1.3)
где , , единичные орты, направленные по осям x, y и z (рис. 1.1).
Скорость можно выразить через проекции на оси x, y, z
(1.http://mir.zavantag.com/4)
Проекции вектора можно выразить через координаты. Для этого продифференцируем выражение (1.3) по времени
(1.5)
Приравнивая коэффициенты при единичных векторах в формулах (1.3) и (1.5), получим
; ; . (1.6)
Модуль скорости точки
, (1.7)
Выразим вектор ускорения точки через проекции на оси прямоугольной декартовой системы координат
(1.8)
Для проекций ускорения можно получить
(1.10)
Е
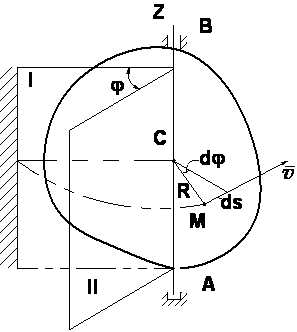
стественный способ. Этот способ применяется, когда известна траектория точки. Положение точки М определяют дуговой координатой s, т. е. расстоянием вдоль траектории от выбранного начала отсчета О (рис. 1.3). При этом произвольно устанавливают положительное направление отсчета координаты s по траектории (указано стрелкой на рисунке).
Рис. 1.3
Движение точки задано, если известны ее траектория, начало отсчета ^ , положительное направление отсчета дуговой координаты и закон движения точки, т. е. зависимость s(t).
Определим скорость и ускорение точки при естественном способе задания движения. Введем единичный вектор , связанный с движущейся точкой ^ и направленный по касательной к траектории в сторону возрастания дуговой координаты s (рис. 1.http://mir.zavantag.com/4). Очевидно, что – переменный вектор, т. к. его направление зависит от s. Вектор скорости точки М направлен по касательной к траектории, поэтому его можно представить в виде
, (1.11)
где – проекция вектора на направление вектора , которая равна модулю мгновенной скорости.
Рис.1.http://mir.zavantag.com/4
Е
сли за малое время dt точка проходит по траектории путь, равный длине элементарной дуги ds, то модуль мгновенной скорости будет равен
, (1.12)
или производной от дуговой координаты s по времени.
Чтобы найти ускорение точки, продифференцируем (1.11) по времени
. (1.13)
Преобразуем последнее слагаемое этого выражения
. (1.1http://mir.zavantag.com/4)
Определим приращение вектора на участке элементарной дуги ds (рис. 1.http://mir.zavantag.com/4). Можно показать, что при стремлении точки 2 к точке 1 отрезок траектории между ними стремится к дуге окружности с центром в некоторой точке О. Эту точку называют центром кривизны траектории в данной точке, а радиус R соответствующей окружности – радиусом кривизны траектории в той же точке. Как видно из рис. 1.http://mir.zavantag.com/4, угол
,
откуда
.
Следует учесть, что при ds 0 угол между и стремится к π/2.
Введем единичный вектор нормали к траектории в точке 1, перпендикулярный к вектору в этой точке и направленный к центру кривизны. Запишем последнее равенство в векторном виде
. (1.15)
Подставив (1.13) и (1.15) в формулу (1.12), получим
Первое слагаемое в этой формуле называют тангенциальным
ускорением , а второе – нормальным
; . (1.16)
Т
аким образом, полное ускорение точки может быть представлено как векторная сумма тангенциального и нормального ускорений (рис. 1.5). Тангенциальная составляющая описывает изменение скорости по модулю, а нормальная – по направлению.
Рис. 1.5
Модуль полного ускорения точки при движении по криволинейной траектории
. (1.17)
1
.3 Вращение вокруг неподвижной оси.
Движение твердого тела, при котором две его точки А и В остаются неподвижными, называют вращением тела вокруг неподвижной оси, а неподвижную прямую АВ называют осью вращения тела.
Рассмотрим произвольную точку М тела, не лежащую на оси вращения ^ При вращении твердого тела расстояния MA, MB и расстояние R от точки М до оси вращения должны оставаться неизменными. Таким образом, все точки тела, вращающегося вокруг неподвижной оси, описывают окружности, центры которых лежат на оси вращения, а плоскости перпендикулярны к этой оси. Вращение Рис.1.5
вокруг неподвижной оси совершают, например, роторы турбин, электрических двигателей и генераторов, коленчатые валы двигателей внутреннего сгорания и т. д.
Найдем элементарное перемещение любой точки ^ твердого тела при таком повороте. Положение точки А зададим радиусом-векто-
ром проведенным из некоторой точки О на оси вращения.
Тогда линейное перемещение конца радиуса-вектора (рис. 1.6) связано с углом поворота d соотношением в векторном виде
. (1.18)
Рис. 1.6
Следует отметить, что равенство (1.17) справедливо лишь для бесконечно малого поворота , в пределах которого радиус-вектор можно считать неизменным. Направление этого вектора совпадает с направлением поступательного движения буравчика, рукоятка которого вращается вместе с телом, т. е. подчиняется правилу правого винта.
^
Скорости движения различных точек тела, вращающегося вокруг неподвижной оси, различаются. Поэтому для описания вращения твердого тела вводят угловые величины, относящиеся ко всему телу в целом, а не к отдельным его точкам. Такими величинами являются угол поворота , угловая скорость и угловое ускорение тела.
Вектор угловой скорости тела определяют в виде
, (1.18)
где dt – промежуток времени, за который тело совершает поворот . Вектор совпадает по направлению с вектором .
Изменение вектора со временем характеризуют вектором углового ускорения , который определяют в виде
. (1.19)
Направление вектора совпадает с направлением приращения вектора .
Единицей угловой скорости в СИ является радиан в секунду (рад/с), а единицей углового ускорения – радиан на секунду в квадрате (рад/с2).
Используя определения (1.18) и (1.19), получим выражения для проекций угловой скорости и углового ускорения z и z на ось вращения z, (рис. 1.7)
; . (1.20)
Рис. 1.7
Формулы для расчета (t) и (t). можно получить интегрированием (1.20)
(t) = zt + 0 ; z(t) = zt + z0 . (1.21)
Выразим скорость произвольной точки твердого тела, вращающегося вокруг неподвижной оси, через угловую скорость . Пусть положение точки М относительно некоторой точки О оси вращения характеризуется радиусом-вектором r (рис. 1.10). Разделим обе части формулы (1.17) на dt. Т. к. и , то искомое выражение примет вид
, (1.22)
Модуль вектора скорости в формуле (1.22)
= R, (1.23)
где R – радиус окружности, по которой движется точка М.
Найдем полное ускорение точки М. Для этого продифференцируем (1.22) по времени
. (1.2http://mir.zavantag.com/4)
В данном случае ось вращения неподвижна, и векторы
mir.zavantag.com
Кинематика поступательного движения
Назад (Физика).Полезно почитать:
Иродов И.Е. Механика. (Скачать)
Фриш Том 1. Механика. (Скачать)
Сивухин Д.В. Курс общей физики. Механика.
Савельев И.В. Курс ОБЩЕЙ физики. Механика.
Яворский Б.М., Детлаф А.А. Курс общей физики. Справочник по физике.
Механика.
Механика — наука о движении и равновесии тел.
Материальная точка – это тело, размеры и форма которого в условиях данной задачи несущественны.
Абсолютно твёрдое тело – это система материальных точек, расстояния между которыми не меняются в процессе движения.
Механическое движение – это изменение положения тела в пространстве с течением времени.
- Виды механического движения:
- Поступательное.
- Вращение вокруг неподвижной оси.
- Вращение вокруг неподвижной точки.
- Плоское движение.
- Свободное движение.
Поступательное – это такое движение твёрдого тела, при котором любая прямая, связанная с телом, всё время остаётся параллельной своему начальному положению.
Плоское – это такое движение твёрдого тела, при котором каждая его точка движется в плоскости, параллельной некоторой неподвижной (в данной системе отсчёта) плоскости.
Описание механического движения.
Тело отсчёта — это тело, относительно которого задаётся положение данного тела или данной точки.
Система отсчёта — совокупность тела отсчёта, связанной с ним системы координат, и синхронизованных между собой часов.
Декартова система координат.

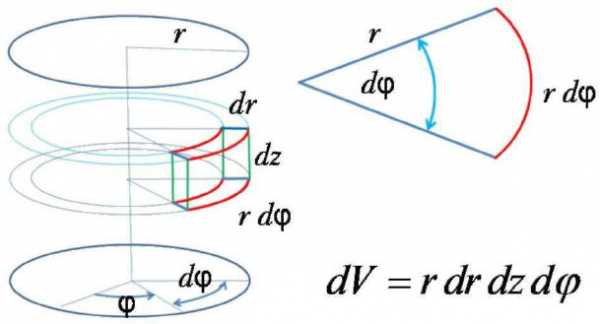
Цилиндрическая система координат.

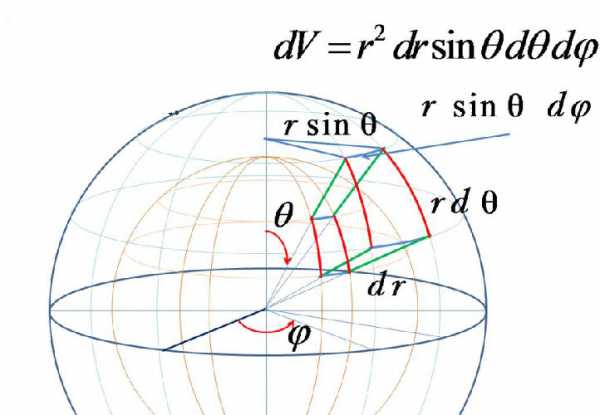
Сферическая система координат.

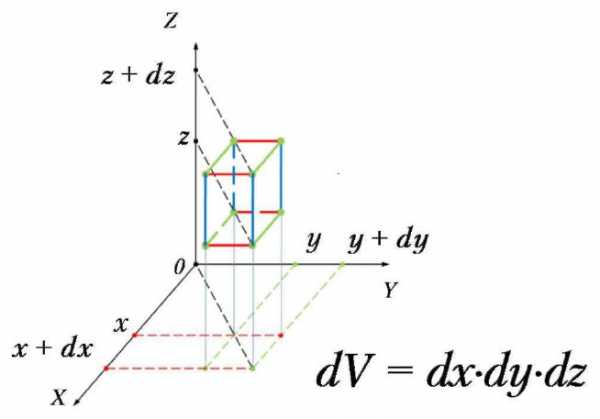
Элемент объема в декартовой системе координат.
Элемент объема в цилиндрической системе координат.
Элемент объема в сферической системе координат.
Измерение времени.
Часы — тело или система тел, в которых совершается периодический процесс, служащий для измерения времени.
1 секунда равна 9102631700 колебаниям электромагнитного излучения между двумя сверхтонкими уровнями основного состояния атома цезия 133.
Измерение расстояний.
Один метр — длина пути, проходимая светом в вакууме в течение 1/299792458 секунды.
Принципы, используемые при построении классической механики.
- Однородность пространства — все пространственные точки эквивалентны между собой (начало отсчёта можно выбрать в любой точке).
- Изотропность пространства — все направления в пространстве эквивалентны (систему координат можно поворачивать произвольным образом).
- Однородность времени — все моменты времени эквивалентны (в любой момент можно начать отсчёт времени).
Радиус-вектор.
Радиус-вектор точки – это вектор, проведённый из начала координат в данную точку.
Основные понятия кинематики.
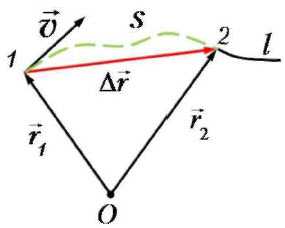 |
Пусть за интервал времени от t1 до t2 материальная точка переместилась из положения 1 в положение 2. О – начало отсчёта. r1 и r2 – радиусы-векторы точки в моменты времени t1 и t2 соответственно. l – траектория материальной точки. S – путь, пройденный материальной точкой за интервал времени от t1 до t2. |
Перемещение материальной точки за интервал времени от t1 до t2:
Перемещение материальной точки за интервал времени от t=t1 до t=t2 – это вектор, проведенный из её положения в момент времени t1 в её положение в момент времени t2.
Траектория материальной точки – это линия, которую она описывает при своём движении.
Длина пути S – это сумма длин всех участков траектории, пройденных материальной точкой за рассматриваемый промежуток времени.
Скорость и ускорение.
Среднее ускорение:
Мгновенное ускорение:
Векторный способ описания движения.
 |
Для того, чтобы описать движение материальной точки, необходимо указать зависимость её радиус-вектора от времени. |
Скорость и ускорение материальной точки.
 |
Средняя скорость материальной точки в интервале времени от t1 до t2: Мгновенная скорость: |
Среднее ускорение материальной точки в интервале времени от t1 до t2:
Мгновенное ускорение:
Скорость материальной точки в момент времени t:
Радиус-вектор материальной точки в момент времени t:
V0, r0 – скорость и радиус-вектор материальной точки в момент времени t=0.
Перемещение материальной точки в момент времени t:
Координатный способ описания движения.

Вектор скорости материальной точки. Проекции вектора скорости на оси координат:
Модуль вектора скорости:
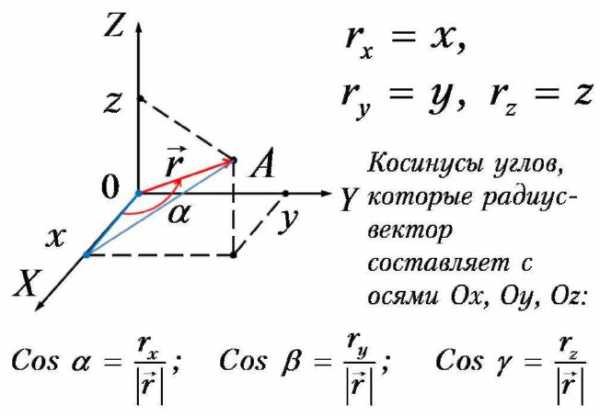
Косинусы углов, которые вектор скорости составляет с осями Ox, Оу, Oz:
Для ускорения все выглялит аналогично.
Перемещение материальной точки за интервал времени от t1 до t2 Проекции вектора перемещения на оси координат:
Приращение радиус-вектора материальной точки (перемещение).
Проекции приращения радиус-вектора на оси координат:
Модуль приращения радиус-вектора:
Косинусы углов, которые приращение радиус-вектора составляет с осями Ox, Оу, Oz:
Траекторный способ описания движения.
Используется, когда траектория движения материальной точки известна заранее. Положение материальной точки задаётся с помощью дуговой координаты l, отсчитываемой от выбранного на траектории начала.
Скорость материальной точки:
Модуль вектора скорости равен производной от пути по времени.
Полное ускорение материальной точки:
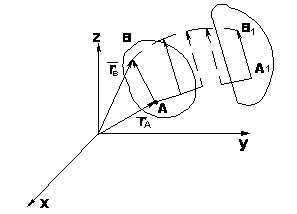
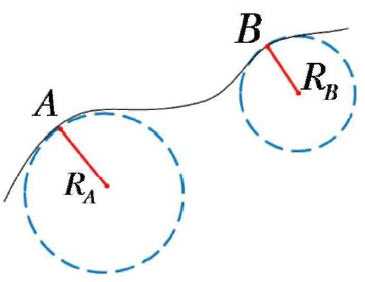
Радиус кривизны траектории.
RA и RB – радиусы окружностей, аппроксимирующих траекторию в данных точках.
Выразим нормальное ускорение материальной точки через радиус кривизны её траектории:

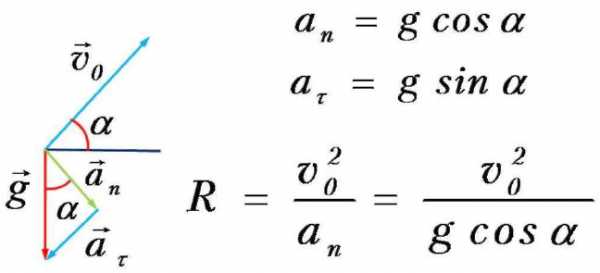
Пример:
Камень брошен со скоростью v0 под углом к горизонту. Определите его нормальное и тангенциальное ускорение, и радиус кривизны траектории в начальный момент времени.
Решение:
Движение с постоянным ускорением.
Зависимость скорости материальной точки от времени:
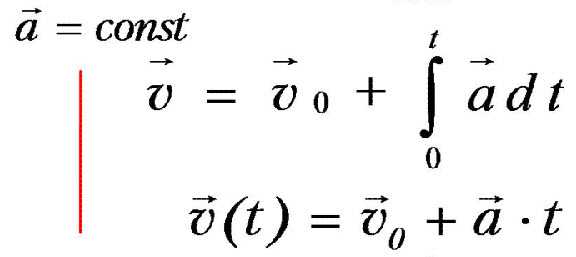
Зависимость радиус-вектора материальной точки от времени:

Перемещение материальной точки за интервал времени от 0 до t:
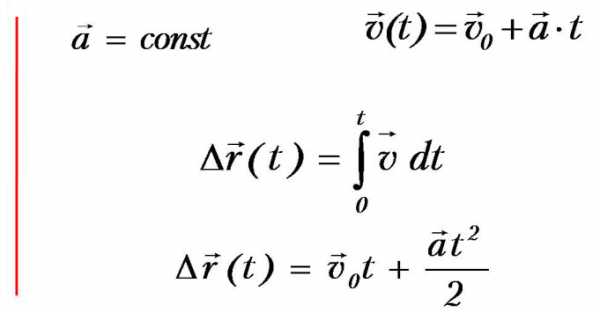
Формула для разности квадратов скоростей.
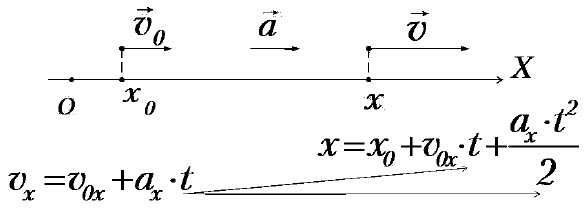
Приращение координаты материальной точки за интервал времени от 0 до t:
Проекция на ось Ох перемещения материальной точки за интервал времени от О до t:
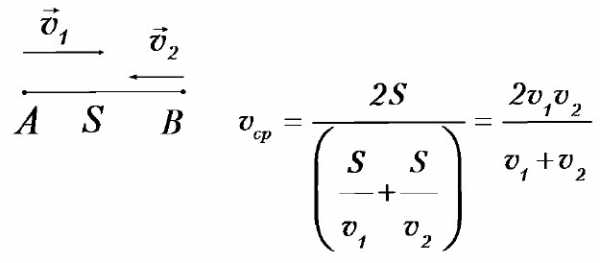
Средняя скорость прохождения отрезка пути.
Средней путевой скоростью движения точки называется скалярная величина равная отношению пути, пройденного точкой за интервал времени t2-t1, к его продолжительности.
Пример 1:
Материальная точка прошла путь из точки А в точку В со скоростью v1 и обратно со скоростью V2. Вычислите среднюю путевую скорость.
Решение:
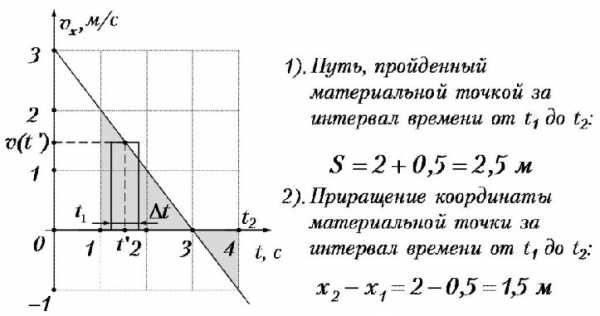
Пример 2:
Материальная точка движется вдоль оси ОX. По графику зависимости Vx(t) вычислим:
Пример 3:
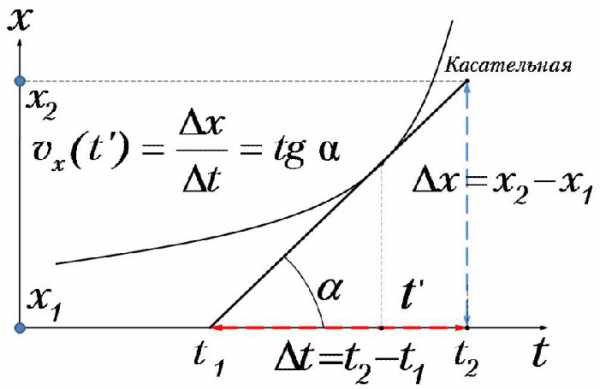
По графику зависимости x(t) вычислим Vx(t‘):
Пример 4:
Материальная точка движется вдоль оси Ох. По графику зависимости x(t) вычислим Vср:

akak-ich.ru
Реферат Кинематика (физика)
скачатьРеферат на тему:
План:
- Введение
- 1 История кинематики
- 2 Основные понятия кинематики
- 3 Задачи кинематики
- 4 Деление кинематики по типам объекта исследования
- 4.1 Кинематика точки
- 4.2 Кинематика твёрдого тела
- 4.3 Кинематика деформируемого тела, Кинематика жидкости
- 4.4 Кинематика газа
Примечания
Литература
Введение
Кинема́тика (греч. κινειν — двигаться) в физике — раздел механики, изучающий математическое описание (средствами геометрии, алгебры, математического анализа…) движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.). Исходные понятия кинематики — пространство и время. Например, если тело движется по окружности, то кинематика предсказывает необходимость существования центростремительного ускорения без уточнения того, какую природу имеет сила, его порождающая. Причинами возникновения механического движения занимается другой раздел механики — динамика.
Различают классическую кинематику, в которой пространственные (длины отрезков) и временные (промежутки времени) характеристики движения считаются абсолютными, то есть не зависящими от выбора системы отсчёта, и релятивистскую. В последней длины отрезков и промежутки времени между двумя событиями могут изменяться при переходе от одной системы отсчёта к другой. Относительной становится также одновременность. В релятивистской механике вместо отдельных понятий пространство и время вводится понятие пространства-времени, в котором инвариантным относительно преобразований Лоренца является величина, называемая интервалом.
1. История кинематики
Долгое время понятия о кинематике были основаны на работах Аристотеля, в которых утверждалось, что скорость падения пропорциональна весу тела, а движение в отсутствие сил невозможно. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей. Изучая свободное падение (знаменитые опыты на Пизанской башне) и инерцию тел, он доказал неправильность идей Аристотеля. Итоги своей работы по данной теме он изложил в книге «Беседы и математические доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению». [1]
Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде.
В XVIII веке Ампер первый использовал вариационное исчисление в кинематике.
После создания СТО, показывающей, что время и пространство не абсолютны и скорость имеет принципиальное ограничение, кинематика вошла в новый этап развития в рамках релятивистской механики (см. Релятивистская кинематика).
2. Основные понятия кинематики
- Система отсчёта — сопоставленная с континуумом реальных или воображаемых тел отсчёта система координат и прибор(ы) для измерения времени (часы). Используется для описания движения.
- Координаты — способ определять положение точки или тела с помощью чисел или других символов.
- Радиус-вектор используется для задания положения точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
- Траектория — непрерывная линия, которую описывает точка при своём движении.
- Скорость — векторная величина, характеризующая быстроту перемещения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта.
- Ускорение — векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени.
- Угловая скорость — векторная величина, характеризующая скорость вращения тела.
- Угловое ускорение — величина, характеризующая быстроту изменения угловой скорости.
3. Задачи кинематики
Главной задачей кинематики является математическое (уравнениями, графиками, таблицами и т. п.) определение положения и характеристик движения точек или тел во времени. Любое движения рассматривается в определённой системе отсчёта. Также кинематика занимается изучением составных движений (движений в двух взаимно перемещающихся системах отсчёта).
Положение точки (или тела) относительно заданной системы отсчёта определяется некоторым количеством взаимно независимых функций координат:
- ,
где n определяется количеством степеней свободы. Так как точка не может быть в нескольких местах одновременно, все функции fi(t) должны быть однозначными. Также в классической механике выдвигается требование их дифференцируемости на промежутках. Производные этих функций определяют скорость тела. [2]
Скорость движения определяется как производная координат по времени:
- ,
где — единичные векторы, направленые вдоль соответствующих координат.
Ускорение определяется как производная скорости по времени:
Следовательно, характер движения можно определить, зная зависимость скорости и ускорения от времени. А если кроме этого известны ещё и значения скорости/координат в определённый момент времени, то движение полностью задано.
4. Деление кинематики по типам объекта исследования
В зависимости от свойств изучаемого объекта, кинематика делится на кинематику точки, кинематику твёрдого тела, кинематику деформируемого тела, кинематику газа, кинематику жидкости и т. д.
4.1. Кинематика точки
Основная статья: Кинематика точки
Кинематика точки изучает движение материальных точек — тел, размерами которых можно пренебречь по сравнению с характерными размерами изучаемого явления. Поэтому в кинематике точки скорость, ускорение, координаты всех точек тела считаются равными.
Частные случаи движения в кинематике точки:
- Если ускорение равно нулю, движение прямолинейное (траектория представляет собой прямую) и равномерное (скорость постоянна).
- ,
где s — длина пути траектории за промежуток времени от t2 до t1, — проекции на соответствующие оси координат.
- Если ускорение постоянно и лежит в одной прямой со скоростью, движение прямолинейное, равнопеременное (равноускоренное, если ускорение и скорость направлены в одном направление; равнозамедленное — если в разные).
- ,
где s — длина пути траектории за промежуток времени от t2 до t1, — проекции на соответствующие оси координат, — проекции на соответствующие оси координат.
- Если ускорение постоянно и перпендикулярно скорости, движение происходит по окружности — вращательное движение.
- ,
где R — радиус окружности, по которой движется тело.
Если выбрать систему декартовых координат xyz так, чтобы центр координат был в центре окружности, по которой движется точка, оси y и x лежали в плоскости этой окружности, так чтобы движение осуществлялось против часовой стрелки, то значения координат можно вычислить по формулам:
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если ускорение постоянно и не лежит на одной прямой с начальной скоростью, движение параболическое.
Если выбрать систему декартовых координат xyz так, чтобы ускорение и начальная скорость лежали в плоскости xy и ускорение было сонаправленно с осью y, то значения координат можно вычислить по формулам:
- ,
где и — проекции на соответствующие оси.
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если тело выполняет разные движения в разных направлениях, то эти движения могут рассчитываться отдельно и складываться по принципу суперпозиции. Например, если в одной плоскости тело совершает вращательное движение, а по оси, перпендикулярной этой плоскости — равномерное поступательное, то вид движения — винтовая линия с постоянным шагом.
- В общем виде скорость, ускорение и координаты вычисляются по общим формулам (см. задачи кинематики, путь вычисляется по формуле:
4.2. Кинематика твёрдого тела
Кинематика твёрдого тела изучает движение абсолютно твёрдых тел (тел, расстояние между двумя любыми точками которого не может изменяться).
Так как любое тело ненулевого объёма имеет бесконечное число точек, и соответственно бесконечное число фиксированных связей между ними, тело имеет 6 степеней свободы и его положение в пространстве определяется шестью координатами (если нет дополнительных условий).
Связь скорости двух точек твердого тела выражается через формулу Эйлера:
- ,
где — вектор угловой скорости тела.
4.3. Кинематика деформируемого тела, Кинематика жидкости
Основные статьи: Кинематика деформируемого тела, Кинематика жидкости
Кинематика деформируемого тела и кинематика жидкости относятся к кинематике непрерывной среды.
В рамках данного раздела кинематики рассматривается общая теория деформации среды и определяются уравнения непрерывности, отражающие неразрывность среды.
4.4. Кинематика газа
Кинематика газа изучает деление газа на скопления при движении и описывает движение этих скоплений. В рамках кинематики газа описываются не только основные параметры движения, но и типы движения газа.
Примечания
- Научная биография Галилео Галилея
- Кинематика – www.femto.com.ua/articles/part_1/1605.html — статья из Физической энциклопедии
Литература
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. М.: Изд-во Физического факультета МГУ, 1997.
- Матвеев. А. Н. Механика и теория относительности. М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Павленко Ю. Г. Лекции по теоретической механике. М.: ФИЗМАТЛИТ, 2002. — 392с.
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560с.
- Стрелков С. П. Механика. М.: Наука, 1975.
- Яворский Б. М., Детлаф А. А. Справочник по физике для инженеров и студентов вузов (4-е изд.). М.: Наука, 1968.
wreferat.baza-referat.ru