
Гироскоп. Прецессия оси вращения гироскопа. Схема работы гироскопа.
Гироскоп — устройство, способное реагировать на изменение углов ориентации связанного с ним тела относительно инерциальной системы координат.
Основанно на законе сохранения вращательного момента (момента импульса). Термин впервые введен Жаном (Бернаром Леоном) Фуко в 1852 году.
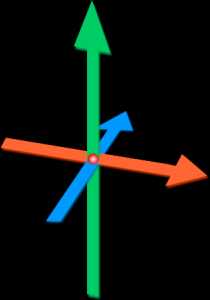
Основное свойство гироскопа — способность сохранять неизменное направление оси вращения (при отсутствии воздействия на неё моментов внешних сил). То есть как бы не поворачивался корпус, желтая хуетень (ротор) всегда будет в одном положении в пространстве).
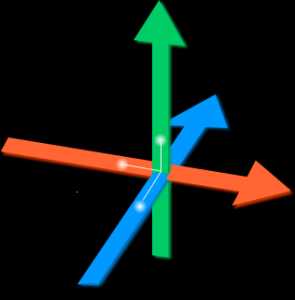
↑ Сферический гироскоп в вакууме (т.е. общая модель).
↑ Картинка показывает работу гироскопа.
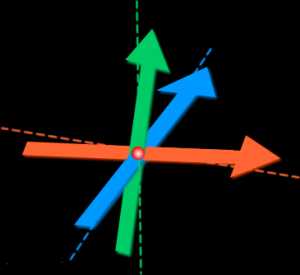
При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Данное свойство напрямую связано с возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента. Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения из-за момента. Но роторный гироскоп, помимо этого, и сам вращается, значит, каждая частица будет иметь относительную скорость. Следовательно, возникнет кориолисова сила, которая будет заставлять гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы.
↑ Картинка показывает, как гироскоп поворачивается вокруг
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инертности.
malishev.info
Принцип работы лазерного гироскопа
Лазерные гироскопы обладают рядом преимуществ по сравнению с электромеханическими. Эти преимущества открывают широкую перспективу в практическом использовании гироскопов на лазерах. Так, для конструкторов систем управления всегда весьма важно, каким способом и в каком виде снимаются с гироскопов выходные данные.
Гироскоп на лазере позволяет получить на его выходе очень удобные для управления сигналы, например, в виде последовательности электрических импульсов, полярность которых определяется направлением поворота гироскопа. Число одиночных импульсов пропорционально малым фиксированным приращениям угла поворота (например, одной секунде дуги). Полный угол поворота гироскопа находится по общему количеству импульсов. Еще более важным для конструкторов является точность работы прибора. Точность работы гироскопов на лазерах чрезвычайно высока. Так как по своему назначению они должны регистрировать скорость вращения меньше 0,1 град/ч, то это приводит к необходимости измерять разность оптических траекторий с точностью до 10

Принципиальная схема лазерного гироскопа
Самая простая конструкция такого прибора представляет собой обычное устройство с тремя зеркалами-отражателями, размещенными по углам контура так, что образуется замкнутая траектория (кольцо) для светового луча. Лазерный луч (см. рис.) создается двумя квантовыми генераторами (ОКХ), один из которых посылает излучение по часовой стрелке, а другой — против часовой стрелки. Упоминание о двух ОКХ приводится с целью упрощения рассуждений. На практике в лазерном гироскопе может быть установлен один оптический квантовый генератор, имеющий два и более активных элементов, формирующих лучи, движущиеся в противоположных направлениях.
Отражаясь от зеркал, проходя от зеркала к зеркалу и, наконец, через полупрозрачное зеркало и призму, световое излучение ослабевает. Для поддержания световых волн в системе на уровне, необходимом для нормальной работы, нужно, чтобы коэффициент усиления световых лучей вдоль всего пути был бы не менее 1. Необходимо также, чтобы на длине пути лазерных лучей укладывалось бы целое число длин волн, генерируемых лазерами, т. е. сдвиг фаз световых колебаний в полости резонатора должен равняться нулю. Для выполнения последнего условия частота колебаний лазера должна быть такой, чтобы усидивающая среда дала коэффициент усиления, достаточный для компенсации потерь в отражающих и других элементах оптического контура лазера. Эта частота при работе ОКГ устанавливается автоматически.
При повороте кольцевого резонатора в инерциальном пространстве оптические пути, проходимые лучами, движущимися по и против часовой стрелки, оказываются неодинаковыми. Разность между оптическими путями приводит в этом случае к возникновению разности частот генерируемых колебаний (эффект Саньяка), которая и определяет скорость вращения резонатора.
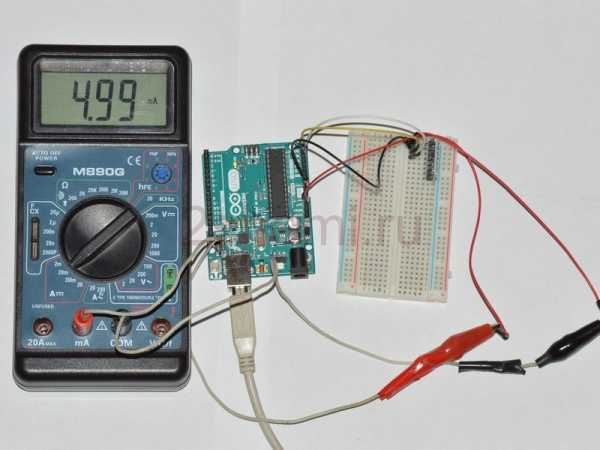
Гироскоп-акселерометр GY-521 | 2 Схемы
Данный модуль представляет собой комбинированный датчик, объединяющий гироскоп, акселерометр и термометр. Акселерометр – это прибор, который измеряет ускорение тела. В состоянии покоя, либо равномерного прямолинейного движения на поверхности Земли акселерометр покажет только наличие ускорения, обусловленного действием поля силы тяжести Земли. Гироскоп способен реагировать на изменение ориентации тела в пространстве. И гироскоп, и акселерометр работают вдоль 3-х координатных осей. Для передачи информации устройство использует интерфейс I2C, это последовательный интерфейс позволяющий организовать обмен сообщениями по двухпроводной линии между 128 устройствами, одно из которых является главным, а остальные ведомыми [1-2]. Модуль гироскоп-акселерометр приобретен на Aliexpress.com
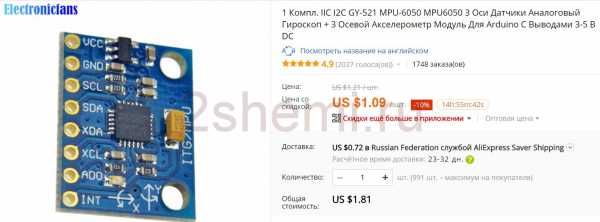 Модуль гироскоп-акселерометр на Aliexpress
Модуль гироскоп-акселерометр на AliexpressКонструктивно модуль представляет собой печатную плату размером 20 х 15 мм, масса 1,5 г с припаянной гребенкой контактов.
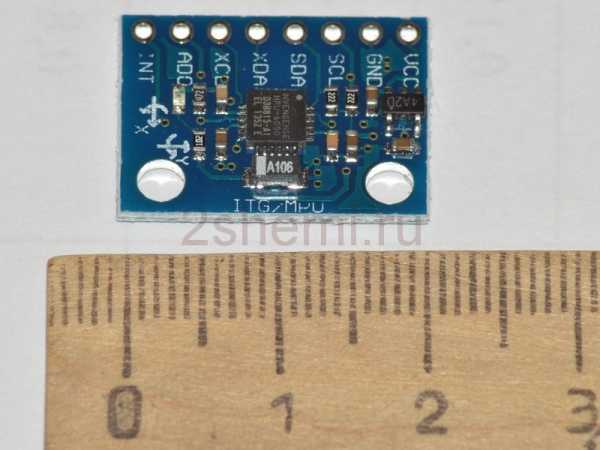 Модуль гироскоп-акселерометр
Модуль гироскоп-акселерометрУстройство поставляется в антистатическом пакете в комплекте с парой не припаянных контактных гребенок.
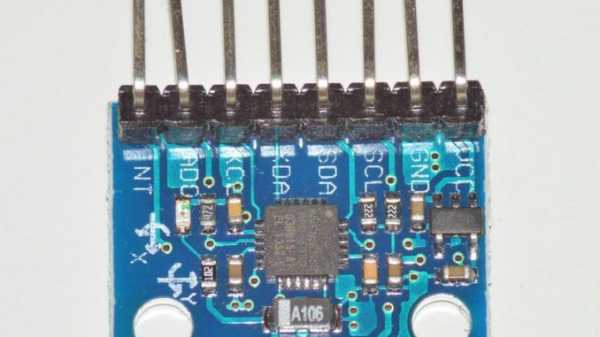
Непосредственно на печатной плате имеется маркировка контактных площадок, а также обозначены две геометрических оси X и Y, третья ось Z перпендикулярно плоскости платы, от наблюдателя, если смотреть со стороны радиокомпонентов.
Естественно данное устройство относится к весьма сложным датчикам. Досконально разобраться в работе подобных устройств сложно, да и не всегда нужно, можно просто воспринимать устройство как «черный ящик», когда мы знаем только какие сигналы надо в этот черный ящик отправит, и какие сигналы в ответ из него мы можем получить. Хотя разумеется чем больше знаний, тем лучше.
Подключение гироскопа к Arduino
Аппаратная платформа Arduino тем и хороша, что для большого количества стандартных датчиков можно найти готовые программные решения. Не является исключением и данное устройство [3-5].
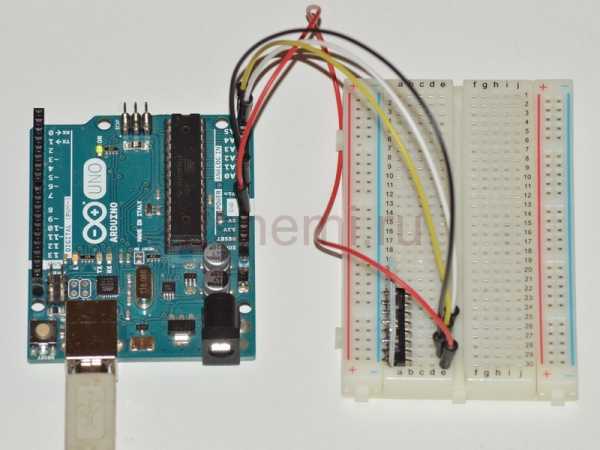
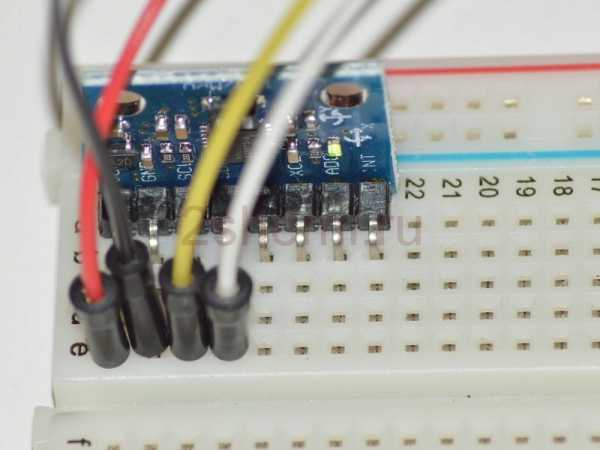
Хотя в общей сложности GY-521 имеет 8 контактов для демонстрации совместной работы с Arduino UNO достаточно всего четырех проводов, остальные контакты нужны для более сложных вариантов взаимодействия [6]. В данном простейшем случае в качестве ведущего устройства выступает плата Arduino UNO. Выводы SDA и SLC гироскопа подключаются соответственно к контактам A4 и A5 платы Arduino [7]. Именно через эти выводы на Arduino UNO реализован данный интерфейс.
Вообще-то линии интерфейса I2C должны быть соединены с шиной питания через резисторы сопротивлением 4,7 кОм [1-2], но в случае одного датчика на макетной плате, все работало и так. Два варианта программы для Arduino, которые опрашивают гироскоп-акселерометр GY-521 можно скачать здесь [8].
Гироскоп-акселерометр питается напряжением 3,3 В от Arduino, ток потребления составляет около 5 мА.
На плате гироскопа-акселерометра располагается индикатор питания.
 Испытания гироскопа
Испытания гироскопаВ мониторе последовательного порта Arduino IDE. Видно, что если прикоснуться к микросхеме на плате датчика рукой, то датчик покажет рост температуры.
 Гироскоп-акселерометр GY-521
Гироскоп-акселерометр GY-521При изменении ориентации модуля в пространстве изменяется показания акселерометра, отображающие, вдоль какой оси (X,Y,Z соответственно) прибора действует ускорение свободного падения.
Влияние резкого поворота вдоль каждой из осей на показания гироскопа.
Помимо самого очевидного применения в летательных аппаратах гироскоп-акселерометр может оказаться полезным в умной одежде, всевозможных устройствах управления, балансирующих роботах [9], системах сигнализации и т.п. Одним словом интересное и недорогое устройство с широкими возможностями. Автор обзора — Denev.
- Блум Д. Изучаем Arduino: инструменты и методы технического волшебства: Пер. с англ. — СПб.: БХВ-Петербург, 2015. — 336 с.
- http://robocraft.ru/blog/communication/780.html
- http://forumdvrobot.ru/forum/3-41-1
- https://ngin.pro/index.php?newsid=188
- http://arduinoprojects.ru/2014/10/подключение-гироскопа-gy-521-mpu-6050-к-arduio/
- https://arduino-kit.ru/catalog/id/modul-3-h-osevogo-giroskopa-i-akselerometra-gy-521-mpu-6050
- https://mysku.ru/blog/china-stores/40178.html
- http://playground.arduino.cc/Main/MPU-6050#sketch
- http://robocraft.ru/blog/projects/570.html
Загрузка…
2shemi.ru
MPU-6050 – гироскоп – акселерометр
Трехосевой гироскоп с трехосевым акселерометром MPU-6050 очень доступен по цене, чем и приобрел себе популярность. Этот датчик применяется для определения положения в пространстве, в системах стабилизации положения, стабилизации прямолинейного движения и движения по заданной кривой. Например, в балансирных роботах, в игровых приставках, применяется в робототехнике, для измерения углов наклона, скорости вращения, в авиамоделизме его применяют в автопилотах. Датчик может применяться для измерения перегрузок и тому подобное.
Схема подключения
Для подключения к контроллеру или микрокомпьютеру, у датчика имеется шина I2C.
Документация по датчику скачать здесь: MPU-6000 and MPU-6050 Product Specification Revision 3.2
Описание регистров здесь: MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.0
Скачать примеры на Python
Для Raspberry Pi (OS: Raspbian) примеры скриптов можно скачать и развернуть так:
git clone https://github.com/avislab/sensorstest.git
Калибровка
Если считать данные с датчика можно заметить некоторую погрешность. Например, при абсолютном покое датчика показания гироскопа будут отличаться от нуля.
А показания акселерометра по модулю могут превышать 1. См. работу скрипта mpu6050_get_raw_no_calibr.py. Дело в том, что каждый экземпляр датчика требует калибровки. У некоторых цифровых датчиков можно встретить корректировочные коэффициенты, которые для каждого экземпляра прошивают в память датчика на этапе производства. К сожалению, в этом датчике такого нет, и мы сами должны позаботиться о калибровке. Показания датчиков имеют некоторое смещение относительно нуля, что и вносит погрешность в измерения. Нам нужно учесть это смещение для каждой оси гироскопа и каждой оси акселерометра и вносить корректировку при расчетах.
На самом деле присутствуют и другие погрешности. Например, трехосевые датчики должны располагаться взаимно перпендикулярно. Но при производстве трудно добиться абсолютной точности, поэтому этот угол также имеет определенные допуски и влияет на погрешность. Кроме того показания датчиков с трех осей могут иметь разную пропорциональность. В данном случае наибольшая погрешность из-за смещения относительно нуля.
В примере я предусмотрел процедуру калибровки. Скрипт калибровки: mpu6050_calibr.py. Калибровка выполняется в два этапа. Сначала датчик должен быть неподвижен. Подразумевается, что угловые скорости равны нулю. Калибруется гироскоп. Затем калибруется акселерометр. Нужно его не спеша поворачивать во всех направлениях. Эта процедура занимает около минуты. После чего функция калибровки выдает вычисленные значения, которые нужно прописать в скрипте. На этом калибровка закончена. После калибровки погрешность значительно снизится. См. Скрипт: mpu6050_get_raw.py. В этом скрипте в следующих строках указываются калибровочные данные:
mpu.gyro_offs = {'x': -178, 'y': 259, 'z': -104}
mpu.accel_offs = {'y': -354, 'x': 389, 'z': -1482}
Гироскоп
Гироскоп измеряет угловые скорости по трем осям с разными пределами измерений: 250, 500, 1000, и 2000 градусов в секунду. Пределы измерения могут быть выставлены в соответствии с Вашими задачами. Не стоит устанавливать без необходимости максимальные пределы, если у вас достаточно медленная система. Правильно выбранные пределы повысят точность измерений.
Для тех, кто ранее был знаком с механическими гироскопами, могут возникнуть некоторые неопределенности. Дело в том, что механические гироскопы стабилизируются в пространстве за счет своих физических свойств. Электронные гироскопы этого делать не могут, они лишь измеряют скорость вращения вокруг осей и ничего не могут сообщить о текущем положении системы.
С помощью электронного гироскопа можно определить положение системы следующим образом. При включении принять начальное положение за нулевую позицию. Затем опрашивать гироскоп с заданным интервалом, зная интервал и скорость вращения, вычислять смещение и добавлять к текущему положению. При этом мы предполагаем, что между двумя опросами датчика система поворачивалась с постоянной скоростью. Такой подход ведет к неизбежному накоплению ошибки. Что видно на примере. Смотри работу скрипта: mpu5060_gyro.py или скрипта, графически отображающего положение гироскопа pyplay_gyro.py.
Акселерометр
Для определения положения системы можно использовать трехосевой акселерометр. Акселерометр также имеет настраиваемые пределы измерений ±2g, ±4g, ±8g і ±16g. Эти пределы устанавливаются в зависимости от динамичности Вашей системы. Напомню, что на любое тело действует сила притяжения. В состоянии покоя g=1. В состоянии свободного падения, когда тело движется к земле с ускорением 9,81 м/с2 – g=0. При разных ускорениях g будет разным. Чем выше ускорение, тем больше g. Поэтому если у Вас достаточно медленная, задемпфированная система, которая физически не способна быстро ускоряться, не стоит устанавливать максимальные пределы измерений. Правильно выбранный диапазон измерений упростит в будущем фильтрацию показаний датчика.
Когда мы поворачиваем датчик в пространстве, показания акселерометра на каждой из трех осей будет изменяться в зависимости от положения. Так, с помощью трехосевого акселерометра под воздействием силы тяжести можно определить положение системы. См. работу скрипта mpu6050_accel_no_filter.py.
Мы видим, что значения достаточно зашумлены. Попробуем их фильтровать. Я применил очень упрощенный фильтр Калмана. См. работу скрипта mpu6050_accel_kf.py. Показания стали более стабильными, однако в нашем случае фильтр малополезен. Если датчик потрясти, мы увидим, что показания углов изменяются и иногда очень сильно, хотя мы его не поворачиваем, а перемещаем с ускорением вдоль осей. Это логично, поскольку на акселерометр теперь кроме силы тяжести действует дополнительная сила, и результирующий вектор изменяет направление. Наглядно это видно на примере скрипта pyplay_accel.py (в этом скрипте фильтрация не используется). Здесь простая фильтрация только частично улучшает ситуацию. В решении этой проблемы нам поможет гироскоп. Именно он может нам сказать, что система-то не вращалась, и поэтому мы можем эти колебания отфильтровать.
Совместное использование гироскопа и акселерометра
Использование отдельно акселерометра или отдельно гироскопа не даст желаемого результата, только их совместное использование с применением фильтрации с учетом показаний двух датчиков дает приемлемый результат. В примере реализован один из способов комплементарного фильтра. Он достаточно прост и работает следующим образом.
За первоначальное положение принимается положение, вычисленное на основании данных акселерометра. Затем с заданным интервалом вычисляются положение на основе данных гироскопа и положение на основе данных акселерометра. Затем вычисленные показания сводятся в общий финальный результат. При этом акселерометр корректирует “дрейф” гироскопа, а гироскоп сглаживает скачки акселерометра при вибрациях и ускорениях. Математически это представляется следующей формулой.
См. работу скрипта mpu6050_final.py или скрипта pyplay_final.py, который графически изображает процесс работы MPU-6050
MotionApps
Если Вам не хочется усложнять себе жизнь с реализацией собственного фильтра, или вычислительных мощностей не достаточно для его работы, можно пойти другим путем. Применительно к этому датчику существует понятие MotionApps. Это некий бинарный код, который записывается в память датчика. Код записывается в энергозависимую память, поэтому его нужно записывать каждый раз после подачи питания. Это занимает около секунды. Код собирает и фильтрует показания со всех осей акселерометра и гироскопа. Данные складываются в буфер FIFO. Собственно, Вам остается дождаться готовности данных и считать буфер со всеми показаниями. Пример на Питоне, который я нашел на GiHub: https://github.com/cTn-dev/PyComms/tree/master/MPU6050
Кто использует Arduino, тоже без труда найдут в интернете аналогичные примеры.
В особенности работы MotionApps я не вникал. Думаю, это тема для отдельной статьи. Меня больше интересовала собственная реализация на Python.
Визуализация
Для наглядности я привел несколько простых примеров для графического отображения положения системы. В этих примерах используется pygame. Запуск этих скриптов рекомендуется выполнять из графической оболочки.
Успехов.
Смотри также:www.avislab.com
Конструкция – гироскоп – Большая Энциклопедия Нефти и Газа, статья, страница 1
Конструкция – гироскоп
Cтраница 1
Конструкция гироскопа позволяет закреплять грузы на трех разных расстояниях от центра тяжести гироскопа. Эти расстояния указаны в таблице на приборе. [1]
Однако несовершенство схемы и элементов конструкции гироскопов в кардановом подвесе приводит к возникновению моментов, действующих на гироскоп в процессе его эксплуатации и значительно отклоняющих ось его ротора от заданного направления в пространстве. [2]
На рис. 7.16 показана схема конструкции волоконного гироскопа. Его действие основано на эффекте Саньяка [77], при котором между волнами, распространяющимися навстречу друг другу, возникает зависящий от скорости вращения сдвиг фазы. [4]
Рис – 4 29 СтРУктУРная схема сис конструкции гироскопа, то эти пере темы с гио Налич. [5]
Одинаковые моменты внешних сил, действующие вокруг осей прецессии гироскопов и определяемые их несовершенством ( моменты трения в опорах оси прецессии, смещение центра масс ротора гироскопа, неравножесткость конструкции гироскопа, моменты тя-жения токоподводов и др.) ( см. гл. [6]
Наиболее простая по форме конструкция газодинамического подшипника катушечного типа ( рис. 9.51) широко применяется для изготовления гироскопов навигационных приборов. Конструкция гироскопа на керамических газодинамических подшипниках представлена на рис. 9.52. Массивный обод 5 ротора охватывает упорную пластину 6 подшипника со спиральными канавками. Радиальные подшипники / образованы центральной керамической осью 7 ( шип в данном случае неподвижен) и двумя керамическими чатами 2 ротора, в которых размещены две магнитные активные части 4 симметричного двух-статорного электродвигателя обращенной конструкции. Статоры 3 закреплены на средней утолщенной части керамической оси. [8]
При дальнейшем повышении точности гироскопических приборов идут по двум направлениям. Во-первых, совершенствуют производство и конструкции существующих гироскопов и, во-вторых, разрабатывают новые более совершенные гироприборы, основанные на новых принципах работы. [9]
На рис. 4.1 представлены основные схемы волоконно-оптических интерферометров, являющихся базовыми элементами конструкций фазовых ВОД. Волоконно-оптические интерферометры Маха-Цендера ( рис. 4.1, а) и Майкельсона ( рис. 4.1 6) используют два световых канала, один из которых – измерительный, а другой – опорный. Многолучевые волоконно-оптические интерферометры Фабри-Перо выполняются с использованием одного волоконного канала в двух модификациях: с полностью волоконным ( собственным) ( рис. 4.1, в) и с встроенными ( рис. 4.1, г) резонаторами. На рис. 4.1, е представлена схема волоконного кольцевого интерферометра Саньяка, которая служит основой для конструкций волоконных гироскопов и ряда фазовых ВОД. [10]
Пусть ось собственного вращения гироскопа совпадает с осью ох. Если вращать корпус гироскопа вокруг оси ог, то возникает момент гироскопической реакции, под действием которого начинается прецессия ( вращение) вокруг оси оу. Этой прецессии противодействуют центрирующие пружины. Момент, создаваемый пружинами, пропорционален углу поворота рамки гироскопа. При такой конструкции гироскопа, соответствующем выборе жесткости центрирующих пружин и подборе степени Демпфирования ( затухание критическое) можно считать, что угол поворота рамки гироскопа пропорционален скорости вращения корпуса гироскопа вокруг оси ог. На корпус двухстепенного гироскопа, предназначенного для измерения угловой скорости, прикрепляется потен-циометрический датчик, подвижный контакт которого связан с осью рамки гироскопа. При развороте корпуса гироскопа на выходе потенциометра появится напряжение, пропорциональное скорости разворота. [11]
Второй главной технической трудностью было создание подвеса гироскопа, в котором момент приложенных к ротору внешних сил относительно вертикальной оси был бы ничтожно малым. Еще в магнитном компасе, существовавшем в течение многих веков, чувствительный элемент – магнитная стрелка – поддерживался с помощью поплавка жидкостью. Томсон перенес этот способ в гироскопиче-146 ский компас ( 1884) 2, поместив гироскоп в сосуд, плавающий в жидкости. Второй способ маломоментного подвеса мы находим в конструкции гироскопа Фуко, где внешнее кольцо висит на нити. [13]
В работе [31] физическую природу ослабления усиления момента объясняют тем, что рамка гироскопа становится как бы более инерционной. Возможно и другое объяснение этого явления. Наличие упругой податливости кожуха и ротора в плоскости действия пары сил, возникающих в результате прецессии двухстепенного гироскопа, превращает двухстепенной гироскоп в диапазоне углов упругих деформаций в трехстепенной. Это означает, что кожух гироскопа, приобретая дополнительную, хотя и ограниченную, степень свободы, становится внутренней рамкой трехстепенного гироскопа, в результате чего получает дополнительную сопротивляемость передачи момента Л4ДМ корпусу КА. Если для абсолютно жесткого гироскопа действие момента Л4ДМ равносильно его развороту как обычного твердого тела, то для упругого гироскопа характерна потеря части мощности момента из-за действия гироскопических сил. Эта часть мощности датчика момента бесполезно тратиться, превращаясь в тепловую энергию из-за внутреннего трения в упругих элементах конструкции гироскопа. [15]
Страницы: 1
www.ngpedia.ru
Гироскоп — WiKi
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издавна люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы, основанные на гравитации: отвес и уровень. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Древней Греции были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоанн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Основные типы гироскопов по количеству степеней свободы:
- двухстепенные,
- трехстепенные.
Основные два типа гироскопов по принципу действия:
- механические гироскопы,
- оптические гироскопы.
Также проводятся исследования по созданию ядерных гироскопов, использующих ЯМР для отслеживания изменения спина атомных ядер.[9]
Механические гироскопы
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трёхстепенного роторного гироскопа
Прецессия механического гироскопа.При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Поведение гироскопа в инерциальной системе отсчёта описывается, согласно следствию второго закона Ньютона, уравнением
- M→=dL→dt,{\displaystyle {\vec {M}}={{d{\vec {L}}} \over {dt}},}
где векторы M→{\displaystyle {\vec {M}}} и L→{\displaystyle {\vec {L}}} являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса.
Изменение вектора момента импульса L→{\displaystyle {\vec {L}}} под действием момента силы возможно не только по величине, но и по направлению. В частности, момент силы M→{\displaystyle {\vec {M}}} , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный L→{\displaystyle {\vec {L}}} , приводит к движению, перпендикулярному как M→{\displaystyle {\vec {M}}} , так и L→{\displaystyle {\vec {L}}} , то есть к явлению прецессии. Угловая скорость прецессии Ω→P{\displaystyle {\vec {\Omega }}_{P}} гироскопа определяется его моментом импульса и моментом приложенной силы[10]:
- M→=Ω→P×L→,{\displaystyle {\vec {M}}={\vec {\Omega }}_{P}\times {\vec {L}},}
то есть Ω→P{\displaystyle {\vec {\Omega }}_{P}} обратно пропорциональна моменту импульса ротора гироскопа, или, при неизменном моменте инерции ротора — скорости его вращения.
Одновременно с возникновением прецессии, согласно следствию третьего закона Ньютона, гироскоп начнёт действовать на окружающие его тела моментом реакции, равным по величине и противоположным по направлению моменту M→{\displaystyle {\vec {M}}} , приложенному к гироскопу. Этот момент реакции называется гироскопическим моментом.
То же движение гироскопа можно трактовать иначе, если воспользоваться неинерциальной системой отсчёта, связанной с кожухом ротора, и ввести в ней фиктивную силу инерции — так называемую кориолисову силу. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать.
Вибрационные гироскопы
Вибрационные гироскопы — устройства, сохраняющие поворачивающие или сохраняющие направление своих колебаний при повороте основания пропорционально угловой скорости (ДУС — датчики угловой скорости) или углу поворота основания (интегрирующие гироскопы). Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторными гироскопами. В англоязычной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — хотя принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.
Например, микромеханические вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сегвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.
Подобные типы микрогироскопов используются в мобильных устройствах, в частности, в мультикоптерах, фотоаппаратах и видеокамерах (для управления стабилизацией изображения), в смартфонах и т.д[11].
- Принцип работы
Два подвешенных грузика вибрируют на плоскости в MEMS-гироскопе с частотой ωr{\displaystyle \scriptstyle \omega _{r}} .
При повороте гироскопа возникает Кориолисово ускорение равное a→c=−2(v→×Ω→){\displaystyle \scriptstyle {\vec {a}}_{c}=-2({{\vec {v}}\times {\vec {\Omega }}})} , где v→{\displaystyle \scriptstyle {\vec {v}}} — скорость и Ω→{\displaystyle \scriptstyle {\vec {\Omega }}} — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как : Xipωrcos(ωrt){\displaystyle \scriptstyle X_{ip}\omega _{r}\cos(\omega _{r}t)} , а положение грузика в плоскости — Xipsin(ωrt){\displaystyle \scriptstyle X_{ip}\sin(\omega _{r}t)} . Внеплоскостное движение yop{\displaystyle \scriptstyle y_{op}} , вызываемое поворотом гироскопа равно:
- yop=Fckop=2mΩXipωrcos(ωrt)kop{\displaystyle y_{op}={\frac {F_{c}}{k_{op}}}={\frac {2m\Omega X_{ip}\omega _{r}\cos(\omega _{r}t)}{k_{op}}}}
- где:
- m{\displaystyle \scriptstyle m} — масса колеблющегося грузика.
- kop{\displaystyle \scriptstyle k_{op}} — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
- Ω{\displaystyle \scriptstyle \Omega } — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
Разновидности
 Гироскоп на МАКС-2009
Гироскоп на МАКС-2009- Пьезоэлектрические гироскопы.
- Твердотельные волновые гироскопы[12][13]. Работа одной из разновидностей ТВГ разработанные с 80-х гг. компаниями GE Marconi, GE Ferranti (ВБ), Watson Industires Inc. (США), Inertial Engineering Inc. (США) Innalabs, и другими основаны на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и циклически-симметричным. При этом, осесимметричная форма резонатора позволяет достичь характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость, что критично для многих систем стабилизации. Резонаторы подобных КВГ вибрируют по второй форме колебаний (как и в HRG). Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами / пучностями составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают парную форму колебаний. Угол между главными осями двух режимов составляет 45 градусов. Замкнутый контур управления (компенсационная обратная связь — КОС) гасит парную форму колебания к нулю. Амплитуда силы (то есть сигнал пропорциональные току или электрическому напряжению в цепи КОС), необходимая для этого, пропорциональна угловой скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной аналогично КОС маятниковых акселерометров и классических роторных ДУС. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закреплённые на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих «тактических» применений (хотя и снижает чувствительность датчика пропорционально расширению его диапазона измерений). Отметим, что упомянутые гироскопы используют современные сплавы инварного типа с паянными пьезоэлектрическими элементами ввода-вывода или пьезокерамические резонаторы с вжиганием электродов. В любом случае, их добротность теоретически ограничена величинами порядка 100 тыс. (на практике, обычно, не выше 20 тыс.), что на несколько порядков ниже много-миллионной добротности резонаторов КВГ из кварцевого стекла или монокристаллов, используемых для «стратегических» применений.
- Камертонные гироскопы.
- Вибрационные роторные гироскопы (в том числе динамически настраиваемые гироскопы)[14].
- МЭМС-гироскопы[14].
Оптические гироскопы
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.Делятся на лазерные гироскопы (активные оптические), пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические (ВОГи ИОГ). Принцип действия основан на эффекте Саньяка, открытом в 1913 году[14][15]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[16]. В то время как в неинерциальной системе она может отличаться от c[17]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре[14]:
- Δt=4SΩc2,{\displaystyle \Delta t={\frac {4S\Omega }{c^{2}}},}
где Δt{\displaystyle \Delta t} -разность времён прихода лучей, выпущенных в разных направлениях, S{\displaystyle S} — площадь контура,Ω{\displaystyle \Omega } — угловая скорость вращения гироскопа. Так как величина Δt{\displaystyle \Delta t} очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длиной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[14]:
- Δφ=8πSΩλc,{\displaystyle \Delta \varphi ={\frac {8\pi S\Omega }{\lambda c}},}
где λ{\displaystyle \lambda } — длина волны.
Схема простейшего механического гироскопа в карданном подвесеСвойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА’, BB’ и CC’, пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром (маятником), так как из-за суточного вращения Земли и ухода гироскопа происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[18].
Системы стабилизации
Системы стабилизации бывают трех основных типов.
- Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, России выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Перспективы развития гироскопической навигации
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические. Однако решение углового положения аппарата в пространстве с использованием СНС систем (многоантенных) хоть и возможно, но весьма затруднено и имеет ряд значимых ограничений, в отличие от гироскопических систем.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
Использование в бытовой технике
Значительное удешевление производства МЭМС-датчиков привело к тому, что они все чаще используются в смартфонах и игровых приставках.
Гироскопы применялись в контроллерах для игровых приставок: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii и в более поздних. Вместе с гироскопом в них установлен акселерометр.
Изначально единственным датчиком ориентации в смартфонах был трехосевой МЭМС-акселерометр, чувствительный лишь к ускорению. В состоянии относительного покоя он позволял приблизительно оценить направление вектора силы тяготения Земли (g). С 2010 года смартфоны стали дополнительно оснащаться трехосевым вибрационным МЭМС-гироскопом, одним из первых был iPhone 4. Иногда также устанавливается магнитометр (электронный компас), позволяющий компенсировать дрейф гироскопов.[19][11]
Игрушки на основе гироскопа
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла), спиннер (волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки).
Кроме того, существует спортивный гироскопический тренажёр.
Ряд радиоуправляемых вертолётов использует гироскоп.
Минимум три гироскопа нужны для полета мультикоптеров, в частности квадрокоптеров.
ru-wiki.org
Гироскоп – страница 7
Вектор суммарного момента Gl’ теперь уже не будет совмещен с осью оу и составит с ней некоторый угол а. Главная ось АА1 гироскопа, непрерывно движущаяся к совмещению с вектором момента Gl’ пойдет теперь к совмещению не с осью or/, а с направлением вектора суммарного момента Gl’. Так как вместе с поворотом гироскопа будет вращаться вокруг оси oz и вектор момента Gl‘, все на больший угол а, удаляющийся от плоскости yoz, то и главная ось гироскопа, стремящаяся к совмещению с вектором Gl‘, будет непрерывно перемещаться вокруг оси oz, совершая около нее конусообразные движения. При этом угол рассогласования между осями АА1 и oz обычно настолько мал, что практически главную ось АА1 гироскопа можно считать совмещенной с истинной вертикалью oz.
Однако маятниковая гироскопическая вертикаль не получила распространения в авиации из-за больших ее размеров. Дело в том, что для непрерывного выдерживания главной оси маятниковой гировертикали в непосредственной близости от направления истинной вертикали необходим значительный по величине момент, создаваемый силой веса гироскопа.
С этой целью для обеспечения требуемой точности прибора приходится утяжелять ротор, что влечет за собой и увеличение общих размеров прибора. При малых же размерах ротора и малом его весе момент, возникающий при отклонении гироскопа от истинной вертикали, оказывается недостаточным для противодействия возмущения, порождающим ошибки маятниковой гироскопической вертикали.
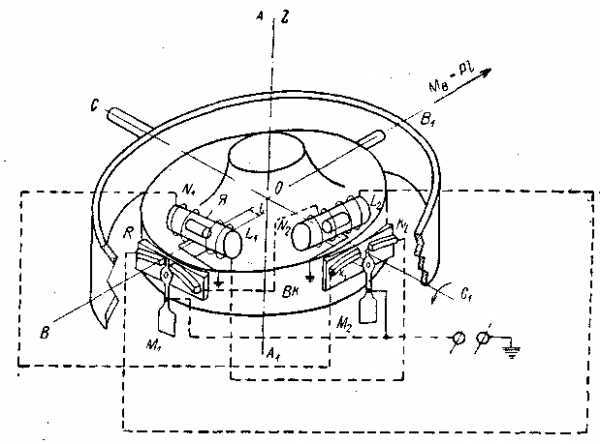
Рис. 33. Принципиальная схема устройства гирогоризонта
По этим причинам маятниковая гировертикаль не могла быть использована в авиации, найдя себе применение только в морском флоте. В авиации для сохранения вертикального положения главной оси небольшого по размерам гироскопа применяются различные методы. На рис.33 приведена схема гироскопа с тремя степенями свободы, центр тяжести которого совмещен с точкой подвеса, а его главная ось ЛЛ, расположена вертикально. На гироскопической камере ВК, которая, как известно, выполняет роль внутреннего кольца подвеса, установлено два цилиндра из немагнитного материала. Эти цилиндры расположены взаимно-перпендикулярно, причем каждый из них установлен симметрично по отношению к соответствующим осям ВВ1 и CC1 подвеса гироскопа.
С обоих концов цилиндров располагаются катушки соленоидов N1, L1 и N2; L2, включаемые в сеть электрического тока посредством маятникового М, и М2, оси подвесов которых параллельны осям ВВ1 и CC1 гирокамеры. Предположим, что отклонение главной оси ЛЛ) гироскопа от направления истинной вертикали OZ произошло в результате поворота гироскопа вокруг оси CC1 в направлении, показанном стрелкой. При этом маятник М2, сохраняя отвесное положение, замкнет ламель K2, расположенную совместно со второй ламелью К1 на изолированном основании, укрепленном на корпусе гирокамеры.
Замыкая контактную ламель К2, маятник М2 включит ток в катушку L1 соленоида, расположенного перпендикулярно оси СС1. Воздействие электромагнитного поля соленоида на помещенный внутри цилиндра якорек Я вызовет перемещение последнего вдоль оси СС1 вправо. Вес Р якорька Я создаст на плече момент Мв = Рl, направление которого на схеме показано вектором, совпадающим с осью ВВ1.
Момент Рl вызовет прецессионное движение гироскопа вокруг оси СС1 в результате чего его главная ось AAl будет идти на совмещение с истинной вертикалью 0Z. Как видим, направление перемещения якорьков зависит от того, какую ламель замкнут соответствующие маятники М1 или М2, которые и управляют системой удерживания гироскопа в вертикальном положении, получившей название корректирующего устройства.
Корректирующие устройства гироскопических приборов выполняются в самых различных вариантах, с которыми читатель может познакомиться в литературе, указанной в конце книги.
Однако вне зависимости от их конструктивной разновидности принципиальная сущность корректирующих устройств остается одной и той же.
Маятники той или иной конструкции фиксируют отклонение главной оси гироскопа от направления истинной вертикали и включают в работу устройства, создающие внешние, воздействующие на гироскоп, моменты. Под воздействием этих моментов гироскоп получает прецессионное движение, в результате которого его главная ось и приходит к совмещению с истинной вертикалью.
Гироскопические приборы, оборудованные корректирующими устройствами для выдерживания их главной оси в вертикальном направлении, в отличие от маятниковых гироскопических вертикалей, получили название авиационных гироскопических горизонтов, пользуясь которыми летчики во время полета получают возможность фиксировать величины углов как продольного, так и поперечного крена самолета.
Часто в целях экономии места на приборной доске самолета, которая занята большим количеством приборов, авиационные гироскопические горизонты монтируют в одном корпусе с гироскопическим указателем поворотов. Такой комбинированный прибор (рис.34) совмещает гироскопический горизонт ГГ, гироскопический указатель поворотов УП и маятниковый креномер МК.
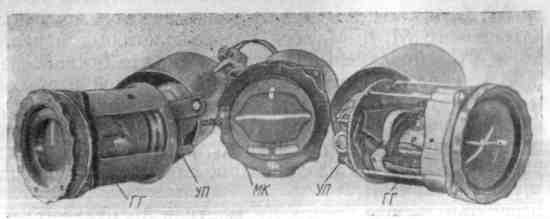
Рис.34. Комбинированный гирогоризонт
Для большей наглядности приведена фотография одновременно трех экземпляров одного и того же гироскопического комбинированного прибора. Каждый экземпляр с предварительно снятой защитной крышкой установлен под различным углом зрения к объективу, благодаря чему читатель может составить представление и о компановке прибора, и о его наружном виде со стороны шкалы.
7.7. Автоматический штурман
В связи с непрерывным ростом скорости и дальности беспосадочных полетов усложнилась работа по определению местоположения летящего самолета, который на протяжении большого участка пути совершает движение в условиях отсутствия видимости земных ориентиров. Возникла необходимость в приборе, автоматически вычисляющим пройденный самолетом путь.
Наличие гироскопа позволило создать такой прибор. Он был назван автоматическим штурманом, который непрерывно записывал пройденный самолетом путь (подобно автоматическому курсографу, регистрирующему направления движения корабля). Прообразом современных автоматических приборов, непрерывно регистрирующих на бумажной ленте курс корабля, самолета или любой другой подвижной платформы явился самопишущий магнитный компас, разработанный М.В. Ломоносовым еще в 1759 г. Отечественный навигационный полуавтомат курсограф был разработан В.Ю. Поляком в 1929 г. Позже решению этой задачи посвятили свой труд Н.А. Гриценко, В.А. Шефов, С.А. Кондратюк и многие другие советские специалисты.
В общих чертах сущность устройства автоматического штурмана может быть рассмотрена по схеме (рис.35). На планшете П закреплена карта с предстоящим маршрутом перелета. Над картой располагаются две взаимно-перпендикулярные кулисы Км и Кш, в прорезях которых установлен соединяющий их между собой ползунок Р, несущий карандаш, соприкасающийся острием с плоскостью карты.
Каждая кулиса заканчивается гайкой, связывающей их с ходовыми винтами ХВШ или ХВМ, приводимыми во вращение электродвигателями. С помощью электродвигателя ЭДМ вращают ходовой винт ХВМ, перемещающий кулису Км.
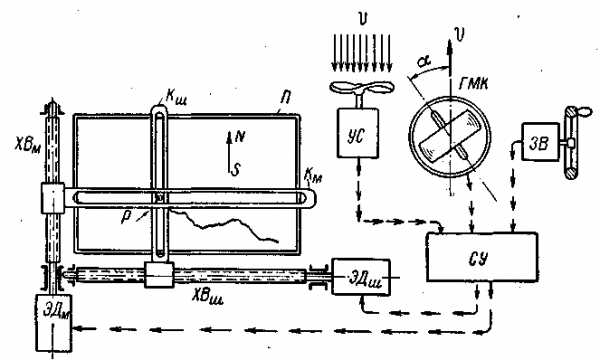
Рис.35. Принципиальная схема устройства автоштурмана
В результате ползунок Р приходит в движение вдоль меридиана карты, и карандаш начинает чертить след перемещения ползунка. Если ток подать на второй электродвигатель ЭДШ, карандаш начнет чертить линию перемещения ползунка вдоль параллели карты.
Для вычерчивания на карте линии проходимого самолетом пути необходимо перемещение ползунка производить со скоростью, пропорциональной скорости самолета. С этой целью в системе автоштурмана используется указатель скорости УС, показания которого передаются в счетно-решающее устройство СУ, автоматически подбирающее необходимое напряжение, подаваемое на электродвигатели ЭДМ и ЭДШ.
Однако показаний одного указателя скорости самолета еще недостаточно для работы автоматического штурмана. Дело в том, что в общем случае направление воздушной скорости v самолета может занимать любое положение по отношению к плоскости меридиана MS (рис.36, а). Поэтому для правильной записи на карте проходимого самолетом пути его воздушную скорость v раскладывают на две составляющие: uм – вдоль меридиана и uш – вдоль параллели.
Так как величины uм и uш зависят от курсового угла а, по которому самолет движется по отношению к плоскости меридиана, то для автоматического их определения в счетно-решающее устройство СУ автоштурмана непрерывно подаются показания гиромагнитного компаса ГМК.
В счетно-решающем устройстве, куда непрерывно подаются значения величин воздушной скорости u самолета и курсового угла а, происходит разделение скорости v на составляющие uм и uш
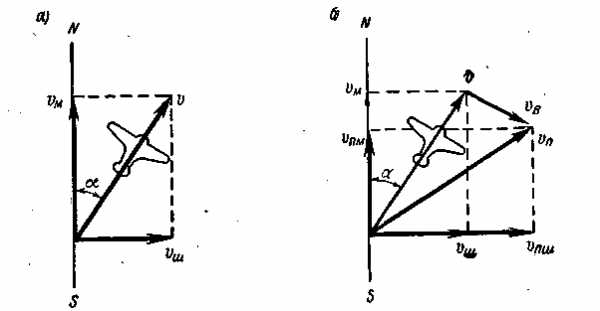
Рис.36. Схема, показывающая снос самолета с заданного курса под воздействием сил ветра
На величину скорости движения самолета относительно земной поверхности большое влияние оказывают ветры. Если скорость ветра, совпадает с воздушной скоростью самолета, то его суммарная (путевая) скорость относительно земной поверхности увеличивается. Когда воздушная скорость самолета и скорость ветра противоположны, путевая соответственно уменьшается. В общем случае скорость ветра vB порождает боковой снос самолета, вызывая его отклонение от заданного направления полета. В итоге путевая скорость vn самолета будет определяться геометрической суммой двух скоростей: воздушной скорости v самолета и скорости ветра uв (рис.36, б).
Проекции путевой скорости v” на направления вдоль меридиана un, м и вдоль параллели un, ш будут уже отличны от. проекций uм и uш на те же направления воздушной скорости v. При большом протяжении маршрута, так же как и при больших скоростях ветра ошибки записи пройденного пути вследствие сноса самолета могут достигать значительных размеров. Поэтому в автоштурманах предусматривается специальное устройство, так называемый задатчик скорости и направления ветра ЗВ, пользуясь которым штурман вручную вводит соответствующую поправку. Эта поправка суммируется в счетно-решающем устройстве СУ с показаниями указателя воздушной скорости УС и гиромагнитного компаса ГМК. В результате из счетно-решающего устройства на электродвигатели ЭДМ и ЭДШ подается напряжение, обеспечивающее перемещение кулис Ки и Кш строго в соответствии с путевыми скоростями самолета: упм – вдоль меридиана и vn ш – вдоль параллели (рис.36, б).

Рис.37. Внешний вид планшета автоштурмана
Таков в самых кратких чертах принцип работы авиационного автоматического штурмана, внешний вид планшета которого показан на рис.37.
coolreferat.com