
Решение задач по теории машин и механизмов
Примеры решения задач и выполнения курсового проекта по теории механизмов и машин (ТММ).
1 Исследование и проектирование плоских рычажных механизмов
Методы кинематического и кинетостатического анализов, а в значительной степени и методы синтеза механизмов, увязаны с их структурой, т. е. способом образования механизмов. Поэтому исследование рычажного механизма необходимо начинать со структурного анализа. Методы структурного, кинематического и силового исследования рассмотрим на конкретном примере, приведенном на рисунке 1.
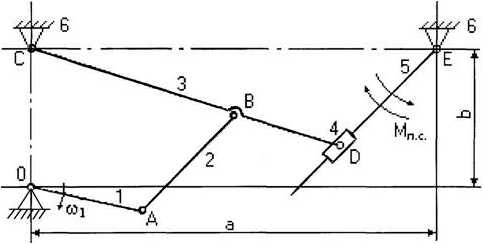
Рисунок 1 – Кинематическая схема плоского рычажного механизма
1.1 Структурный анализ плоского механизма
1.2 Кинематическое исследование плоского механизма
Задачей кинематики механизмов является изучение движения звеньев вне зависимости от сил, действующих на эти звенья. Кинематический анализ считается законченным, если для каждого звена механизма определены положение, скорость и ускорение двух его точек (или положение, скорость и ускорение одной точки звена и угловая координата, угловые скорость и ускорение этого звена).
Названные задачи могут быть решены графическим, графоаналитическим и аналитическим методами.
Рассматривая эти векторные уравнения в проекциях на оси произвольно выбранной системы координат, получают систему алгебраических уравнений для определения перемещений звеньев механизма (угловых – для звеньев, совершающих вращательное движение, и линейных – для звеньев, двигающихся поступательно).
При выполнении курсового проекта по курсу теории механизмов и машин студенту необходимо с помощью ЭВМ определить перемещения, скорости и ускорения выходного звена (звено №5) для 24 положений механизма. Для этого, опираясь на изложенный выше принцип, записывают уравнения перемещений (угловых или линейных в зависимости от задания) выходного звена №5 как функцию угла поворота входного звена (звено №1).
Полученное уравнение (или ряд уравнений) перемещений вводят в ЭВМ. Дифференцирование уравнений для определения скоростей и ускорений выходного звена производится на ЭВМ на основе алгоритма графического дифференцирования.
1.2.5.1 Пример расчета механизма с поступательно движущимся выходным звеном
1.2.5.2 Пример расчета рычажного механизма с выходным звеном, совершающим вращательное движение
1.3 Силовой расчет плоского рычажного механизма
1.3.1 Определение сил и моментов сил инерции
1.3.2 Силовой расчет по методу Н.Г. Бруевича
1.3.3 Определение потерь мощности на трение в кинематических парах
1.3.4 Определение уравновешивающего момента методом Н.Е. Жуковского
2 Кинематический анализ и геометрический синтез зубчатого механизма
2.1 Кинематический анализ редуктора
2.2 Геометрический расчет пары зубчатых колес, нарезанных стандартным инструментом реечного типа
2.3 Построение картины внешнего эвольвентного зацепления
3 Динамический синтез кулачкового механизма
3.1 Построение графиков движения толкателя
3.2 Определение величины окружности минимального радиуса кулачка
Величина окружности минимального радиуса теоретического профиля кулачка для механизмов с роликовым толкателем определяется из условия отсутствия заклинивания, т.е. угол передачи движения не должен быть меньше заданного γmin.
Для кулачкового механизма с поступательно движущимся толкателем, имеющим плоскую тарелку, величина окружности минимального радиуса кулачка определяется из условия выпуклости его профиля.
3.2.1 Кулачковый механизм с поступательно движущимся точечным или роликовым толкателем
3.2.2 Кулачковый механизм с коромысловым роликовым толкателем
3.2.3 Кулачковый механизм с поступательно движущимся плоским толкателем
3.3 Построение профиля кулачка
3.4 Определение усилия пружины, обеспечивающей силовое замыкание высшей пары
Лекции по ТММ >
isopromat.ru
Инженерный институт Теория механизмов и машин
Новосибирский государственный
аграрный университет
Задания и методические указания
по выполнению контрольных работ
Новосибирск 2011
УДК 621.01
ББК 34.41
Кафедра теоретической и прикладной механики
Составитель канд. техн. наук, доц. Ю.И. Евдокимов
Рецензент канд. техн. наук, доц. П.И. Федюнин
Теория механизмов и машин: задания и метод. указания по выполнению контр. работ/ Новосиб. гос. аграр. ун-т. Инженер. ин-т; сост. Ю.И Евдокимов.– Новосибирск, 2011. – 44 с.
Методическая разработка содержит задания для двух контрольных работ по теории механизмов и машин. Задания охватывают основные разделы курса: структурное, кинематическое и силовое исследование плоских рычажных механизмов, а также кинематический анализ многоступенчатых зубчатых передач. Приводятся примеры выполнения каждой задачи контрольных работ.
Предназначена для студентов инженерных специальностей.
Утверждена и рекомендована к изданию методическим советом Инженерного института (протокол № 10 от 11 ноября 2010 г.).
Новосибирский государственный аграрный университет, 2011
Введение
Основной целью изучения дисциплины «Теория механизмов и машин» является приобретение теоретических знаний общих свойств большого разнообразия механизмов, входящих в состав машин, применяемых в сельскохозяйственном и другом производстве.
Самостоятельное решение задач, поставленных в контрольных работах по теории механизмов и машин, закрепляет теоретические знания и способствует лучшему усвоению дисциплины и использованию теории на практике.
Настоящая методическая разработка соответствует программе по дисциплине «Теория механизмов и машин» для инженерно-технических специальностей высших учебных заведений и содержит задачи для двух контрольных работ.
При определении некоторых параметров исходных данных для решения задач следует учитывать величину коэффициента N, размерность которого совпадает с размерностью определяемого параметра исходных данных. Величина коэффициентаN зависит от года поступления студента в институт и выбирается из таблицы 0.
Таблица 0 Значения коэффициента N
Год поступления | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
Значение N | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 10 |
Выбор номера варианта задач контрольных работ производится по двум последним цифрам условного шифра, т. е. номера зачётной книжки студента.
1. Содержание и объём контрольной работы 1
Контрольная работа 1 включает в себя задачи 1 и 2.
1.1. Задача 1. Структурный анализ плоского рычажного механизма
Исходные данные
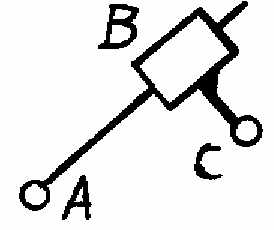
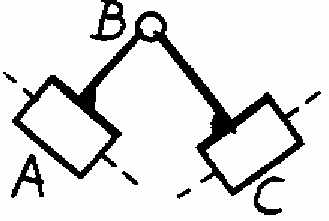
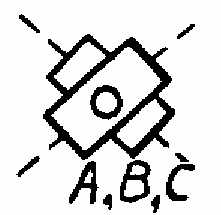
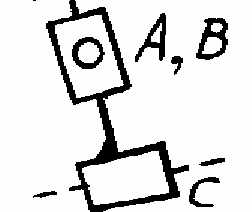
В качестве исходных данных предлагаются структурные схемы плоских рычажных механизмов, изображённые на рисунке 1.1. Выбор номера варианта схемы механизма следует производить по последней цифреномера зачётной книжки студента.
Необходимо выполнить следующее:
Ознакомиться с заданной схемой механизма, выявить стойку, входное, выходное и промежуточные звенья. Изобразить структурную схему механизма без соблюдения масштаба, пронумеровать все звенья (стойку обозначить цифрой 0), обозначить все кинематические пары прописными буквами (О, А, В, С…).
Установить виды движения звеньев относительно стойки (абсолютные) и виды движения относительно друг друга. Составить таблицу кинематических пар, в которой указать номера звеньев, образующих каждую пару, название каждой пары и число её степеней свободы.
Найти число степеней свободы механизма по формуле П.Л. Чебышева.
Выделить начальное звено 1 и стойку 0, изобразив их отдельно.
Оставшуюся кинематическую цепь разложить на структурные группы (группы Ассура), изобразив их отдельно. Указать класс и вид каждой структурной группы.
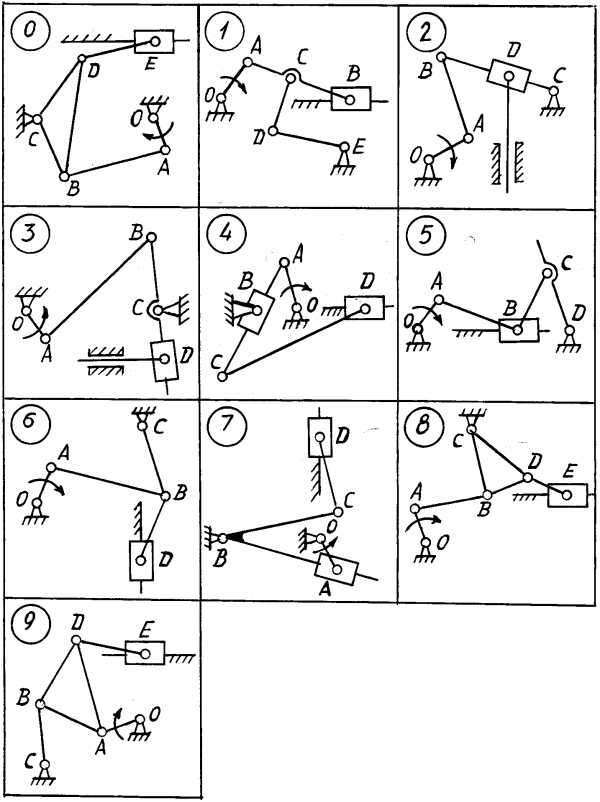
Рисунок 1. 1 – Структурные схемы плоских рычажных механизмов
к задаче 1
studfiles.net
Решение задач по теории машин и механизмов на заказ
Если студент получил фундаментальные знания по математике, физике и теоретической механике, то курс по теории машин и механизмов ему легко дастся, поскольку основан на знании этих дисциплин, а сам по себе является важной промежуточной ступенью в подготовке инженера. В переделах теоретического курса изучаются специальные (практические) дисциплины механического цикла, такие как, детали машин и основы конструирования. Основной целью изучения теории машин и механизмов является подготовка фундамента знаний по общим методам анализа и синтеза механических систем, которые служат для технологического оборудования. Это оборудование будет потом широко применяться выпускником уже в качестве специалиста, окончившего высшее техническое учебное заведение. Также в рамках курса изучаются процессы преобразования энергии, материалов и информации, которые выполняет машина, зачастую, без участия человека. Эти машины, которые до недавнего времени назывались машинами-автоматами, сейчас носят более привычное наименование – робот.
В их работе исключается участие человека в непосредственном выполнении самого технологического процесса. С другой стороны, необходимо присутствие оператора, который следит за работой, определяет программу и корректирует ее, когда это необходимо. Если машины-автоматы или роботы, собраны в технологическую цепочку, тогда это называется «автоматизированная линия», которая подчиняется законам теории машин и механизмов.
Отсутствие времени и другие проблемы
Ситуация классическая, когда заданы задачи по теории машин и механизмов, а на их выполнение нет свободного времени. Причины такой ситуации могут быть совершенно разными, понятно только одно, что анализировать их времени тоже нет, а вот найти возможность решить задачи по теории машин и механизмов быстро и, желательно, недорого нужно. Путей решения этой проблемы несколько, и среди них:
- возможность обратиться за помощью к сокурсникам, но вряд ли у них будет желание и найдется время, кроме своих заданий, выполнять еще и чужие, тем более, без надежды на материальный стимул;
- можно искать возможности в Интернете, но слишком плотное представительство мошенников в Сети отпугивает большинство потенциальных заказчиков подобных услуг. Можно заплатить деньги, заказать нужную услугу, и долго еще потом ждать решения;
- самый продуктивный путь – это воспользоваться услугами специализированных компаний, которые занимаются оказанием услуг подобного рода. О том, что они собой представляют, можно узнать от тех, кто уже пользовался услугами компании и может откровенно рассказать о достоинствах и недостатках. Также важно время пребывания такой компании на рынке. Чаще всего, именно этот показатель говорит безоговорочно в ее пользу, поскольку недобросовестные учреждения о репутации не заботятся. Очень важно сразу узнать, какой будет цена за выполненный заказ.
Делайте заказ у нас
Вы можете заказать выполнение задач по теории машин и механизмов в нашей компании, потому что мы его выполним качественно, и не забудем, что имеем дело со студентом, у которого, из всего имущества и свободных средств, только такой зыбкий финансовый поток, как стипендия. У вас есть уникальная возможность обратиться в нашу компанию, время работы которой на рынке услуг — восемь лет, и мы поможем вам решить все возникшие проблемы, причем сделаем это в срок. Качество работы гарантировано не только долголетней практикой компании, но и квалифицированным штатом сотрудников, которым необходимы для работы: тема задания, время на ее выполнение и контактные данные для контроля за движением процесса.
fiziku5.ru
Теория механизмов и машин (5) – Методические указания
Новосибирский государственный
аграрный университет
Инженерный институт
Теория механизмов и машин
Задания и методические указания
по выполнению контрольных работ
Новосибирск 2011
УДК 621.01
ББК 34.41
Кафедра теоретической и прикладной механики
Составитель канд. техн. наук, доц. Ю.И. Евдокимов
Рецензент канд. техн. наук, доц. П.И. Федюнин
Теория механизмов и машин: задания и метод. указания по выполнению контр. работ / Новосиб. гос. аграр. ун-т. Инженер. ин-т; сост. Ю.И Евдокимов.– Новосибирск, 2011. – 44 с.
Методическая разработка содержит задания для двух контрольных работ по теории механизмов и машин. Задания охватывают основные разделы курса: структурное, кинематическое и силовое исследование плоских рычажных механизмов, а также кинематический анализ многоступенчатых зубчатых передач. Приводятся примеры выполнения каждой задачи контрольных работ.
Предназначена для студентов инженерных специальностей.
Утверждена и рекомендована к изданию методическим советом Инженерного института (протокол № 10 от 11 ноября 2010 г.).
Новосибирский государственный аграрный университет, 2011
ВВЕДЕНИЕ
Основной целью изучения дисциплины «Теория механизмов и машин» является приобретение теоретических знаний общих свойств большого разнообразия механизмов, входящих в состав машин, применяемых в сельскохозяйственном и другом производстве.
Самостоятельное решение задач, поставленных в контрольных работах по теории механизмов и машин, закрепляет теоретические знания и способствует лучшему усвоению дисциплины и использованию теории на практике.
Настоящая методическая разработка соответствует программе по дисциплине «Теория механизмов и машин» для инженерно-технических специальностей высших учебных заведений и содержит задачи для двух контрольных работ.
При определении некоторых параметров исходных данных для решения задач следует учитывать величину коэффициента N, размерность которого совпадает с размерностью определяемого параметра исходных данных. Величина коэффициента Nзависит от года поступления студента в институт и выбирается из таблицы 0.
Таблица 0 Значения коэффициента N
Год поступления | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
Значение N | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 10 |
Выбор номера варианта задач контрольных работ производится по двум последним цифрам условного шифра, т. е. номера зачётной книжки студента.
1. Содержание и объём контрольной работы 1
Контрольная работа 1 включает в себя задачи 1 и 2.
1.1. Задача 1. Структурный анализ плоского рычажного механизма
Исходные данные
В качестве исходных данных предлагаются структурные схемы плоских рычажных механизмов, изображённые на рисунке 1.1. Выбор номера варианта схемы механизма следует производить по последней цифре номера зачётной книжки студента.
Необходимо выполнить следующее:
Ознакомиться с заданной схемой механизма, выявить стойку, входное, выходное и промежуточные звенья. Изобразить структурную схему механизма без соблюдения масштаба, пронумеровать все звенья (стойку обозначить цифрой 0), обозначить все кинематические пары прописными буквами (О, А, В, С…).
Установить виды движения звеньев относительно стойки (абсолютные) и виды движения относительно друг друга. Составить таблицу кинематических пар, в которой указать номера звеньев, образующих каждую пару, название каждой пары и число её степеней свободы.
Найти число степеней свободы механизма по формуле П.Л. Чебышева.
Выделить начальное звено 1 и стойку 0, изобразив их отдельно.
Оставшуюся кинематическую цепь разложить на структурные группы (группы Ассура), изобразив их отдельно. Указать класс и вид каждой структурной группы.

Рисунок 1. 1 – Структурные схемы плоских рычажных механизмов
к задаче 1
1.2. Методические указания к выполнению задачи 1
Звено механизма твердое тело, входящее в состав механизма. Звено может содержать одну или несколько деталей, соединенных жестко между собой.
Стойка неподвижное звено механизма.
Входное звено звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев.
Выходное звено звено, совершающее движение, для выполнения которого предназначен механизм.
Кинематическая пара соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Элемент кинематической пары совокупность поверхностей, линий и отдельных точек звена, по которым оно соприкасается с другим звеном.
В высших кинематических парах элементом соприкосновения является линия или точка.
В низших кинематических парах элементом соприкосновения является поверхность.
Числом степеней свободы механической системы называется число независимых параметров, определяющих положение системы.
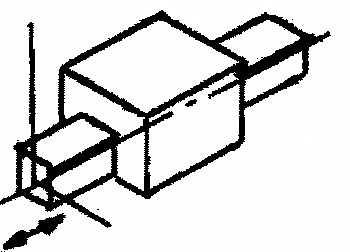
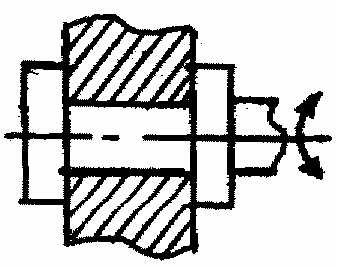
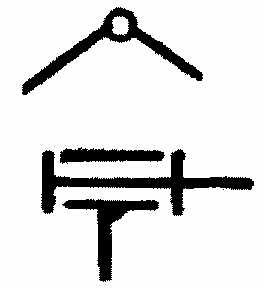
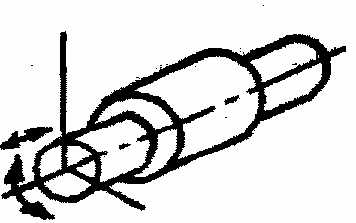
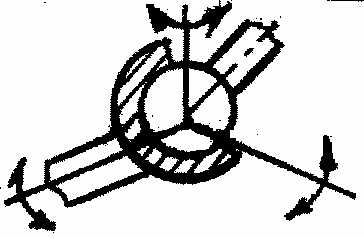
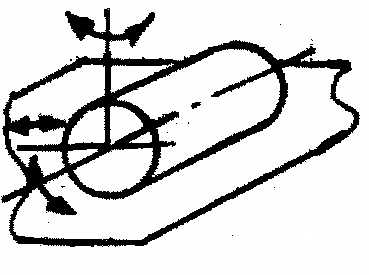
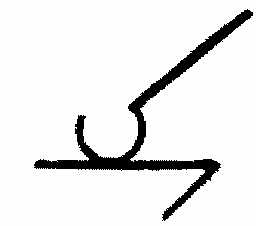
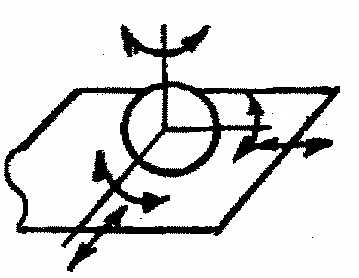
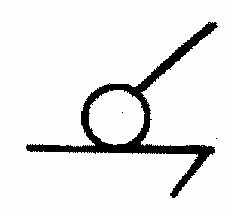
По числу степеней свободы в относительном движении звеньев кинематические пары делятся на одно -, двух -, трех -, четырех и пятиподвижные, которые налагают на относительное движение звеньев соответственно пять, четыре, три, две и одну связь. Изображения и характеристики некоторых кинематических пар приведены в таблице 1.1.
В плоских механизмах траектории движения точек всех звеньев находятся в параллельных плоскостях. В противном случае механизм является пространственным.
Число степеней свободы пространственного механизма без избыточных связей определяют по формуле А.П. Малышева:
где n – число подвижных звеньев,
р1 число одноподвижных кинематических пар;
р2 число двухподвижных кинематических пар;
р3 число трёхподвижных кинематических пар;
р4 число четырёхподвижных кинематических пар;
р5 число пятиподвижных кинематических пар.
Число степеней свободы плоского механизма определяют по формуле П.Л. Чебышева:
Рычажные механизмы содержат только низшие кинематические пары.
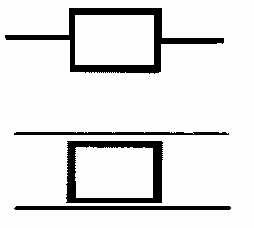
Таблица 1.1 – Виды кинематических пар
Название | Конструктивное изображение | Условное изображение | Число степеней свободы | Число связей |
Поступа- тельная |
|
| 1 | 5 |
Враща- тельная |
|
| 1 | 5 |
Цилин- дрическая |
| 2 | 4 | |
Сферичес- кая |
| 3 | 3 | |
Цилиндр плоскость |
|
| 4 | 2 |
Шар плоскость |
|
| 5 | 1 |
В состав рычажных механизмов могут входить следующие звенья.
Кривошип звено, которое может совершать полный оборот вокруг стойки.
Коромысло звено, образующее вращательную пару со стойкой и неспособное проворачиваться на полный оборот.
Шатун звено, не входящее в кинематическую пару со стойкой.
Ползун звено, образующее поступательную пару со стойкой.
При изображении механизма на чертеже применяют структурную схему с использованием условных изображений звеньев без соблюдения их размеров и кинематическую схему с соблюдением размеров звеньев, необходимых для кинематического исследования. На рисунке 1.2 приведён пример структурной схемы механизма качающегося конвейера с указанием названий звеньев.
Обобщенными координатами механизма называют независимые между собой координаты (угловые или линейные), определяющие положения всех звеньев механизма относительно стойки.
Начальным звеном механизма называется звено, которому приписывается одна или несколько обобщенных координат.
Структурной группой(группой Ассура) называется элементарная кинематическая цепь, число степеней свободы которой относительно элементов её внешних кинематических пар равно нулю.
Образование сложных плоских рычажных механизмов осуществляется путем присоединения к начальному звену и стойке одной или нескольких структурных групп (принцип Ассура).
Структурные группы делятся между собой на классы. В таблице 1.2 показаны пять видов структурной группы второго класса и некоторые виды структурных групп третьего и четвертого классов.
Класс механизма определяется наивысшим классом структурной группы, входящей в его состав.
Рисунок 1.2 – Механизм качающегося конвейера
Таблица 1.2 Классификация структурных групп
Класс | Вид | Схема | Число звеньев | Число пар |
1 | 2 | 3 | ||
2 |
| 2 | 3 | |
2 | 3 |
| 2 | 3 |
4 |
| 2 | 3 | |
5 |
| 2 | 3 | |
3 | 111 112 | 4 4 | 6 6 | |
4 | В2-2В В2-2П | 4 4 | 6 6 |



1.3. Пример выполнения задачи 1
Пример выполнения задачи 1 приведён на рисунке 1.3.

Звенья | Названия | W |
01 | Вращательная | 1 |
12 | Вращательная | 1 |
23 | Вращательная | 1 |
30 | Вращательная | 1 |
24 | Вращательная | 1 |
45 | Вращательная | 1 |
50 | Поступательная | 1 |
Рисунок 1.3 – Пример выполнения задачи 1
textarchive.ru
Лекции по теории механизмов и машин
Напишите или выберитеМеханикаТеоретическая механикаСопротивление материаловТеория машин и механизмовДетали машинВысшая математикаФизикаНачертательная геометрияИнформатикаАвиационная и ракетно-космическая техникаАвтоматизация технологических процессовАвтоматика и управлениеАрхитектура и строительствоБазы данныхВысшая математикаГеометрияГидравликаДетали машинИздательское делоИнформатикаИнформационная безопасностьИнформационные технологииМатериаловедениеМашиностроениеМеталлургияМетрологияМеханикаМорская техникаНаноинженерияНачертательная геометрияПолиграфияПриборостроение и оптотехникаПрограммированиеПроцессы и аппаратыРабота на компьютереРадиофизикаСопротивление материаловТелевидениеТеоретическая механикаТеория вероятностейТеория машин и механизмовТеплоэнергетика и теплотехникаТехнологические машины и оборудованиеТехнология продовольственных продуктов и товаровТранспортные средстваФизикаХолодильная техникаЧертежиЧерчениеЭлектроника, электротехника, радиотехникаЭнергетическое машиностроениеЯдерная энергетика и теплофизикаЯдерные физика и технологииАнализ хозяйственной деятельностиАнтикризисное управлениеБанковское делоБизнес-планированиеБухгалтерский учет и аудитВнешнеэкономическая деятельностьГостиничное делоГосударственное и муниципальное управлениеДеловой этикетДеньгиИнвестицииИнновационный менеджментКредитЛогистикаМаркетингМеждународные рынкиМенеджментМенеджмент организацииМикро-, макроэкономикаНалогиОрганизационное развитиеПроизводственный маркетинг и менеджментПромышленный маркетинг и менеджментСервисСтандартизацияСтатистикаСтратегический менеджментСтрахованиеТаможенное делоТеория управленияТовароведениеТорговое делоТуризмУправление персоналомФинансовый менеджментФинансыЦенообразование и оценка бизнесаЭконометрикаЭкономикаЭкономика предприятияЭкономика трудаЭкономическая теорияЭкономический анализАрхеологияАстрономияБезопасность жизнедеятельностиБиологияБиотехнологияВетеринарияВоспроизводство и переработка лесных ресурсовГеографияГеодезияГеологияГидрометеорологияЕстествознаниеКартография и геоинформатикаМедицинаНефтегазовое делоПочвоведениеПриродообустройство и водопользованиеСельское и рыбное хозяйствоХимияХирургияЭкологияБиблиотечно-информационная деятельностьДизайнДокументоведение и архивоведениеЖурналистикаИскусствоИсторияКонфликтологияКриминалистикаКультурологияЛитератураЛогикаМеждународные отношенияМузыкаПедагогикаПолитологияПраво и юриспруденцияПсихологияРежиссураРеклама и PRРелигияСвязи с общественностьюСоциальная работаСоциологияСтрановедениеТеатроведениеФизическая культураФилософияЭтикаЯзыки (переводы)Языкознание и филология
Выберите вид работы…Решение задачКонтрольная работаКурсовая работаПомощь на экзаменеОтветы на вопросыОтчёт по практикеЧертёжДипломная работаРефератМонографияБизнес-планТворческая работаЭссеСочиненияРецензияДокладНабор текстаМагистерская диссертацияКандидатская диссертацияСтатьяЛабораторная работаПереводПрезентацииПовышение уникальности текстаДругое
isopromat.ru
Машин и механизмов теория — Большая советская энциклопедия
Маши́н и механи́змов теория
Наука об общих методах исследования и проектирования машин (См. Машина) и Механизмов. Наиболее развита часть науки, называемая теорией механизмов, в которой изучаются преимущественно свойства механизмов, являющиеся общими для всех (или для определённых групп) механизмов независимо от конкретного назначения машины, прибора или аппарата. Например, один и тот же механизм для преобразования вращательного движения, выполненный в виде зубчатых колёс, может применяться в автомобиле, часах, мешалках аппаратов химического производства. Во всех указанных случаях требуется одно и то же преобразование движения, поэтому методы исследования и проектирования этих механизмов имеют много общего и составляют содержание теории механизмов. Другую часть науки составляет теория машин, в которой рассматриваются методы исследования и проектирования, являющиеся общими для машин различных областей техники. Обе части науки неразрывно связаны между собой, так как механизмы составляют основу почти любой машины.
Задачи теории машин и механизмов очень разнообразны, но важнейшие из них можно сгруппировать по трём разделам: синтез механизмов, Динамика машин и механизмов и теория машин-автоматов. Под синтезом механизмов понимается та часть их проектирования, которая относится к выбору схемы и нахождению параметров этой схемы, обеспечивающих выполнение требуемых движений. Задачи динамики механизмов состоят в исследовании движения отдельных частей (звеньев) механизма под действием внешних сил. Теория машин-автоматов рассматривает методы построения их схем по условиям согласованности работы отдельных механизмов и достижения оптимальной производительности, точности и надёжности машин-автоматов. Разделение задач теории машин и механизмов на указанные три раздела в некоторой мере условное. Например, в синтезе механизмов учитываются не только кинематические, но и динамические условия; в динамике механизмов на основе исследования движения звеньев механизма даются рекомендации по выбору параметров механизма из условий получения оптимальных динамических характеристик, то есть выполняется динамический синтез; в теории машин-автоматов выбор исполнительных механизмов и их параметров основывается на методах синтеза механизмов, а критерии оптимальности схемы машины-автомата (в особенности схемы управления) часто определяются по динамическим показателям. Однако обзор проблем науки о машинах и механизмах по этим разделам даёт достаточно полное представление о её содержании.
Основы синтеза механизмов в его аналитической форме были заложены в 19 веке в работах русского математика и механика П. Л. Чебышева. Исследуя его работы, можно представить всю последовательность решения задач синтеза механизмов в виде трёх этапов. Первый этап — выбор основного критерия синтеза и ограничивающих условий. Каждый механизм в зависимости от назначения и условий эксплуатации должен удовлетворять ряду требований, разнообразных по форме и содержанию. Некоторые из этих требований могут быть даже противоречивыми. Однако всегда можно установить, какое требование является решающим для правильной работы механизма, и в соответствии с этим выбрать основной критерий, по которому оценивается его качество. Основной критерий синтеза является функцией параметров механизма (называется также функцией-критерием, или целевой функцией), остальные требования к нему формулируются в виде ограничивающих условий на параметры. Другими словами, первый этап решения любой задачи синтеза — этап, на котором происходит формализация требований, предъявляемых к нему. На этом этапе задачи технологические и конструктивные превращаются в математические. Второй этап — установление аналитического выражения функции, характеризующей величину основного критерия синтеза. Выбор основного критерия определяется назначением механизма. Для некоторых механизмов его аналитическое выражение может оказаться очень сложным. Между тем существуют функции, которые имеют более простой вид и в то же время с достаточной для практики точностью характеризуют величину основного критерия. При этом необходимо только, чтобы погрешности от замены функции-критерия её приближённым выражением были меньше тех погрешностей, которые возникают в реальном механизме из-за неточностей изготовления его деталей, упругости звеньев и других причин. Третий этап — вычисление постоянных параметров механизма из условий оптимизации основного критерия с учётом ограничивающих условий (ограничений). В одних случаях эти условия выражаются в виде одного или нескольких уравнений и системы неравенств, из которых непосредственно находятся искомые параметры (точный синтез). В других случаях отыскиваются такие значения параметров, при которых отклонение функции-критерия от оптимального значения является достаточно малой величиной, удовлетворяющей условиям практического использования механизма (приближённый синтез). Для приближённого синтеза Чебышев предложил оригинальный метод вычисления искомых параметров механизма, который привёл в дальнейшем к созданию математической теории приближения функций.
Указанные три этапа синтеза механизмов составляют основное содержание задачи при их проектировании, так как все последующие операции по расчёту на прочность деталей и по установлению конструктивных форм уже не могут существенно изменить его кинематических и динамических свойств. Дальнейшее развитие методов синтеза механизмов в работах русских учёных А. П. Котельникова (1865—1944), В. В. Добровольского (1880—1956) и других отечественных и зарубежных учёных состояло в отыскании наиболее целесообразных методов выполнения отдельных этапов синтеза и применения их к различным видам механизмов (с гидравлическими и электрическими устройствами, пространственные со сложным движением рабочего звена, самонастраивающиеся механизмы и т. п.). При этом выяснилось, что в простейших случаях можно удовлетворить требованиям, предъявляемым к основному критерию и ограничивающим условиям, используя несложные графические методы. Однако применение этих методов не избавляет от необходимости решать задачу синтеза в нескольких вариантах для получения результата, близкого к оптимальному. Только появление ЭВМ дало возможность эффективно и быстро выполнять третий этап синтеза, определяя оптимальные сочетания параметров механизма и даже решая такие задачи синтеза, которые ранее не могли быть решены из-за сложности и трудоёмкости вычислений. В 1965—72 для типовых задач синтеза механизмов были составлены программы вычислений на ЭВМ, позволяющие оптимизировать различные критерии и учитывать большое количество кинематических, динамических и конструктивных ограничений.
Раздел динамики механизмов иногда называется динамикой машин, так как учёт динамических явлений, происходящих в механизмах, имеет первостепенное значение при проектировании машин. В первых работах по динамике машин, выполненных Н. Е. Жуковским (См. Жуковский) и Н. И. Мерцаловым (1866—1948), использовалась только механика твёрдого тела применительно к механизмам с жёсткими звеньями. После внедрения в машины новых механизмов с гидравлическими, а затем и с пневматическими устройствами (1930—50) динамика машин стала опираться не только на механику твёрдого тела, но и на механику жидкостей и газов (см. Механика). В связи с существенным ростом нагруженности и быстроходности машин и повышением требований к их качеству значительно изменилось содержание задач динамики машин: появилась необходимость учитывать упругие свойства звеньев, зазоры в подвижных соединениях, переменность масс и моментов инерции и т. п. Особое внимание стало уделяться развитию методов теории колебаний механических систем в применении к реальному механизму с его упругими и не вполне упругими элементами, зазорами, сухим трением и смазкой, наличием сложных закономерностей деформирования материалов и т. п. Изучалось и продолжает изучаться вредное действие колебаний, вызывающих увеличение нагрузок на звенья механизма, потерю устойчивости, усталостные поломки, недопустимое изменение предписанного закона движения. Вместе с тем возможно и полезное применение колебаний в вибрационных машинах (См. Вибрационная машина), для которых колебательное движение рабочего органа составляет основное движение, заданное назначением машины. К этим машинам принадлежат, например, вибротранспортёры, вибросортировочные машины, вибромашины для забивки свай и др. Решение новых задач динамики машин основывается на развитии методов аналитической механики и нелинейной теории колебаний, механики переменной массы и теории упругости. Особое значение для решения этих задач имеют те методы, которые позволяют достаточно эффективно и быстро без интегрирования систем дифференциальных уравнений получать динамические критерии для расчёта механизмов по частотам и амплитудам установившихся колебаний, для определения границ устойчивости и т. п.
Теория машин-автоматов сравнительно недавно (1945—50) стала рассматриваться как одна из важнейших частей теории машин и механизмов. Машины-автоматы отличаются от неавтоматизированных машин в первую очередь тем, что последовательность работы отдельных механизмов, включая механизмы загрузки и выгрузки, задаётся системой управления. Поэтому развитие теории машин-автоматов связано с совершенствованием методов построения схем управления по выбранному критерию оптимальности, например по условию получения минимального числа элементов, составляющих схему. Наибольшее распространение получили методы, основанные на применении алгебры-логики, и соответственно этот раздел теории машин-автоматов получил название логического синтеза систем управления. В системах управления наряду с электрическими элементами стали применяться пневматические, обладающие, как правило, большей надёжностью. Развитие методов построения систем управления машинами-автоматами привело к созданию систем программного управления, в которых программа требуемых перемещений выражается в форме чисел (цифр) — элементарных (малых) шагов. Для реализации этих шагов предусматривают специальные типы двигателей, называемые шаговыми электродвигателями (См. Шаговый электродвигатель). Особую ценность имеют самонастраивающиеся и адаптирующиеся системы программного управления, в которых программа автоматически корректируется с учётом опыта предшествующих циклов работы системы и условий, в которых должна работать эта система.
Последним достижением теории машин-автоматов является разработка методов проектирования Роботов, то есть машин-автоматов, моделирующих свойства и функции живых организмов и, в частности, имитирующих действия человека при перемещении в пространстве орудий и объектов труда. По своей схеме робот во многом тождествен манипулятору (механической руке), который применяется для работы в вакууме, под водой и в агрессивных средах. Исполнительные органы манипуляторов способны совершать сложные пространств, движения, необходимые для выполнения рабочих операций. Для управления действиями манипуляторов и роботов используются современные методы и средства вычислительной техники, позволяющие оперативно составлять и менять программы движений. В сочетании со станками, контрольными и сборочными автоматами, оснащенными системами программного управления, применение роботов способствует комплексной автоматизации производства. Их применение придаёт системам машин-автоматов гибкость и приспосабливаемость к изменяющимся условиям производства. При проектировании роботов и манипуляторов используются в едином комплексе методы теории машин и механизмов и теории управления. Применительно к проектированию роботов и автоматических манипуляторов развиваются как общие методы — структурный синтез пространств, незамкнутых кинематических цепей, кинематика и динамика пространств, механизмов со многими степенями свободы, теория механизмов с переменной структурой, изменяющейся в процессе движения, так и методы решения задач, относящихся только к манипуляторам, — создание манёвренности, устойчивости в работе, выбор правильного соотношения полезных и холостых ходов, а также проектирование таких систем, в которых оператор чувствует усилие, создаваемое на рабочем органе или на захвате.
По всем трём указанным разделам теории машин и механизмов ведётся интенсивная работа во многих странах. В СССР, США, ГДР, СРР, ЧССР и ФРГ систематически (через 2—3 года) проводятся национальные конференции по проблемам этой науки. Для организации и проведения международных совещаний и конгрессов по теории машин и механизмов, а также для обмена опытом и проведения совместных работ (в первую очередь по терминологии, стандартизации, теории манипуляторов и по проблемам высшего образования) в 1969 создана Международная организация по теории машин и механизмов (International Federation for the Theory of Machines and Mechanisms).
Лит.: Теория машин и механизмов, в. 1—108, М., 1947—65; Механика машин, в. 1—36— , М., 1966— 72—.
И. И. Артоболевский, Н. И. Левитский.
Источник: Большая советская энциклопедия на Gufo.megufo.me
Теория машин и механизмов
ВОПРОСЫ К ЭКЗАМЕНУ ПО «ТММ» специальности 17051. Приведите классификацию кинематических пар. Какие пары могут существовать в плоских механизмах.
2. В чем заключаются формулы образования пространственных и плоских механизмов (Малышева. Чебышева).
3. Укажите основные характеристики пассивных звеньев, кинематических пар и приведите примеры.
4. Каковы принципы образования механизмов по Ассуру. Что такое группа Ассура. Приведите основные виды плоских рычажных механизмов образованных группами 2 класса 2 порядка.
5. Структурный анализ механизмов рассмотрите на примере. Обоснуйте основные цели и условия замены в плоских механизмах высших кинематических пар низшими.
6. Каковы основные задачи кинематического исследования механизмов. Понятие о геометрических и кинематических характеристиках. Связь кинематических и передаточных функций.
7. Каковы основные задачи кинематического анализа механизмов. Аналитический метод – способ проекций векторного контура (рассмотреть на примере).
8. Каковы основные задачи кинематического анализа механизмов. В чем заключается метод планов (показать на примере).
9. Каковы основные задачи кинематического анализа механизмов. В чем заключается метод графического дифференцирования диаграмм.
10.Укажите основные задачи проектирования механизмов. Приведите условие нормальной работы, кинематику и параметры, достоинства и недостатки фрикционных передач. Что такое вариатор скорости.
11. Объясните основную теорему зацепления, проанализируйте её следствия.
12. Каковы геометрические элементы зубчатых колёс.
13. Сложные зубчатые механизмы. Приведите последовательность определения передаточного отношения зубчатых сложных передач с промежуточными колесами и валами.
14. Укажите основные определения и виды планетарных передач, объясните их назначение.
15. Проанализируйте на примере аналитический метод кинематического анализа планетарных передач (метод Виллиса).
16. В чем заключается графоаналитический метод кинематического анализа планетарных передач (приведите последовательность действий на примере).
17. Обоснуйте основные задачи и условия синтеза планетарных передач.
18. Что такое волновые механизмы, их основные преимущества, область применения, определение передаточного отношения.
19. Основные критерии синтеза зубчатых зацеплений. Укажите основные свойства эвольвенты окружности. Что такое инволюта угла.
20. Проанализируйте свойства эвольвентного зацепления зубчатых колес.
21. Каковы основные методы изготовления зубчатых колес и особенности геометрии режущего инструмента.
22. Смещение режущего инструмента при нарезании зубчатого колеса. Заострение зуба при смещении.
23. Когда наблюдается и в чём заключается явление подрезания зубьев. Получите минимально-допустимое нарезаемое число зубьев, приведите и проанализируйте основные методы коррегирования зубчатых колес.
24.Каково назначение, классификация, геометрия и кинематика червячных передач.
25. Каково назначение, виды и особенности геометрических параметров винтовых передач.
26. Каково назначение, основные параметры, классификация и структура кулачковых механизмов.
27. Приведите последовательность кинематического анализа кулачковых механизмов методом кинематических диаграмм.
28. Проанализируйте и получите основные зависимости и условия синтеза кулачковых механизмов наименьших размеров.
29.Приведите и сопоставьте между собой основные законы движения толкателя в кулачковых механизмах.
30. В чем заключаются основные задачи силового анализа механизмов. Приведите классификацию сил действующих в механизме.
31. Механические характеристики машин, приведите примеры для машин двигателей и исполнительных машин.
32. Что такое сила инерции, объясните особенности этих сил для тел с вращательным, поступательным и сложным движением.
33. В чём заключается условие кинетостатической определимости кинематических цепей.
34. Приведите последовательность силового анализа механизмов методом планов на примере.
35. В чём заключается метод проф. Н.Е. Жуковского для определения уравновешивающей силы, когда его целесообразнее использовать.
36. Укажите основные режимы движения механизмов и приведите уравнения каждого из них.
37. Прямая задача динамики. Уравнение движения механизма в дифференциальном виде.
38. Что такое динамическая модель машинного агрегата, для чего её используют. Приведение сил и моментов сил к звену приведения.
39. Что такое динамическая модель машинного агрегата, для чего её используют. Приведение масс и моментов инерции масс звеньев в механизме.
40. Проанализируйте установившееся движение машинного агрегата, объясните почему возникает периодическая неравномерность движения и как решается задача её регулирования.
41. Приведите последовательность расчета махового колеса при действии сил зависящих от положения механизма (частный случай Jп = const).
42.Вибрации и колебания в машинах. Понятие о неуравновешенности механизма (звена). Метод замещающих масс.
43. Полное и частичное статическое уравновешивание кривошипно-ползунного механизма.
44. Балансировка роторов при статической, моментной и динамической неуравновешенности.
45.Когда возникает трение скольжения, объясните, как направлена и находится сила трение скольжения. Проанализируйте от чего зависит коэффициент трения. Что такое угол и конус трения.
46. В чём заключается условие самоторможения на горизонтальной плоскости, при каких случаях тело будет двигаться ускоренно. Какое трение наблюдается при движении клинчатого ползуна. Что такое приведенный коэффициент трения.
47. Получите основные условия для движения тела вверх и вниз по наклонной плоскости с учетом трения.
48. Приведите последовательность расчета момента необходимого при монтаже и демонтаже резьбового соединения.
49. Укажите особенности трения во вращательной кинематической паре и пятах.
50. Укажите особенности трения гибких тел. Получите формулу Эйлера.
51. Укажите особенности трения качения, когда возможно чистое качение тела.
52. Что такое КПД, приведите основные расчетные формулы для его определения. Как определяется КПД механизма с последовательным соединением звеньев.
53. Что такое КПД, приведите основные расчетные формулы для его определения. Как определяется КПД механизма с параллельным соединением звеньев.
54. Что такое КПД. Как определяется КПД винтовой передачи.
Лекция 1
Введение. Цель и задачи курса ТММ. Место курса в системе подготовки инженера. Машинный агрегат и его составные части. Классификация машин. Механизм и его элементы. Классификация механизмов. Краткая историческая справка.
Введение. Курс «Теория машин и механизмов» является общетехнической дисциплиной, изучается в течение одного семестра и состоит из: курса лекций объемом 28 часов, практических занятий (включая рубежный контроль) – 12 часов, лабораторный практикум – 12 часов. Курсовая работа с объемом 1 лист графической части и пояснительная записка на 30-50 рукописных (машинописных) страниц. Курсовая работа защищается комиссии из двух преподавателей, по ней проставляется дифференцированная оценка. Семестр завершается экзаменом с учетом рубежного контроля, выполненной контрольной работы и защищенным лабораторным работам.
Курс ТММ базируется на знаниях полученных студентом на младших курсах при изучении физики, высшей математики, теоретической механики, инженерной графики и вычислительной техники. Знания, навыки и умение приобретенные студентом при изучении ТММ служат базой для курсов детали машин, основы конструирования элементов химического оборудования, машины и аппараты химических производств.
Рекомендуемая основная литература
1. Теория механизмов и машин. Под ред. К.В.Фролова. М.: Высшая школа, 1987.2. Артоболевкий И.И. Теория механизмов и машин. – М.: Наука, 1988.
3. Левитский Н.И. Теория механизмов и машин. – М.,: Наука, 1990.
4. Семенов М.В. Структура и кинематика механизмов.- Л.: СЗПИ, 1967.
5. Семенов М.В. Динамика механизмов.- Л.: СЗПИ, 1968.
Рекомендуемая дополнительная литература
1. Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории механизмов и машин. М., 1973 г.
2. Кожевников С.Н. Теория механизмов и машин. М., 1975 г.
3. Кореняко А.С. Курсовое проектирование по теории механизмов и машин. М-К.:, 1964 г.
4. Безвесельный. Курсовое проектирование по теории механизмов и машин в примерах. Харьков, 1960 г.
5. Попов С.А. Курсовое проектирование по теории механизмов и машин. М., 1986 г.
Цель и задачи курса
Теория механизмов и машин – научная дисциплина об общих методах исследования свойств машин и механизмов и проектирования их новых схем. Она изучает строение (структуру), кинематику и динамику механизмов в связи с их анализом и синтезом.Цель ТММ – анализ и синтез типовых механизмов и их систем.
Задачи ТММ: разработка общих методов исследования структуры, геометрии, кинематики и динамики типовых механизмов и их систем.
Основные разделы курса ТММ:
· структура механизмов и машин;
· геометрия механизмов и их элементов;
· кинематика механизмов;
· динамика машин и механизмов.
Изучение курса начнем с общих определений:
Машины и их классификация
Машина – техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Существуют следующие виды машин:
1. Энергетические машины – преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
Двигатели (рис.1.1), которые преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
Pэл (U, I) Pмех (M, )
Двигатель
Рис.1.1
Генераторы (рис.1.2), которые преобразуют механическую энергию в энергию другого вида (например, электрогенератор преобразует механическую энергию паровой или гидравлической турбины в электрическую)
Pмех (M, ) Pэл (U, I)
Генератор
Рис.1.2
2. Рабочие машины – машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности:
Транспортные машины (рис.1.3), которые используют механическую энергию для изменения положения объекта (его координат).
Pмех (M, )
Транспортная
машина
f (x0,y0) f (xn,yn)
Рис.1.3
Технологические машины (рис.1.4), использующие механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
Pмех (M, )
Технологическая
машина
f (x0, y0, z0) f (xn, yn, zn)
Рис.1.4
3. Информационные машины – машины, предназначенные для обработки и преобразования информации. Они подразделяются на:
Математические машины (рис.1.5), преобразующие входную информацию в математическую модель исследуемого объекта.
Математическая
машина
I0, Кбит In, Кбит
Рис.1.5
Контрольно-управляющие машины (рис.1.6), преобразующие входную информацию (программу) в сигналы управления рабочей или энергетической машиной.
I0
Программа Контр.-упр. машина
Ii Ii
Рабочая машина
Рис.1.6
4. Кибернетические машины (рис.1.7) – машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий в зависимости от состояния окружающей среды (т.е. машины обладающие элементами искусственного интеллекта).
Окружающая среда
Ij
I0
Программа Контр.-упр. машина
Ii Ii
Рабочая машина
Рис.1.7
Машинный агрегат
Машинным агрегатом (рис. 1.8) – называется техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенная для выполнения каких-либо требуемых функций. Обычно в состав машинного агрегата входят: двигатель, передаточный механизм и рабочая или энергетическая машина. В настоящее время в состав машинного агрегата часто включается контрольно-управляющая или кибернетическая машина. Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины.
Двигатель Передаточный механизм Рабочая машина
Контрольно-управляющая машина
Рис.1.8
Типовыми механизмами будем называть простые механизмы, имеющие при различном функциональном назначении широкое применение в машинах, для которых разработаны типовые методы и алгоритмы синтеза и анализа.
Рассмотрим в качестве примера кривошипно-ползунный механизм. Этот механизм широко применяется в различных машинах: двигателях внутреннего сгорания, поршневых компрессорах и насосах, станках, ковочных машинах и прессах. В каждом варианте функционального назначения при проектировании необходимо учитывать специфические требования к механизму. Однако математические зависимости, описывающие структуру, геометрию, кинематику и динамику механизма при всех различных применениях будут практически одинаковыми. Главное или основное отличие ТММ от учебных дисциплин изучающих методы проектирования специальных машин в том, что ТММ основное внимание уделяет изучению методов синтеза и анализа, общих для данного вида механизма, независящих от его конкретного функционального назначения. Специальные дисциплины изучают проектирование только механизмов данного конкретного назначения, уделяя основное внимание специфическим требованиям. При этом широко используются и общие методы синтеза и анализ, которые изучаются в курсе ТММ.
Если при рассмотрении структуры машины для её элементов, не принимается во внимание их форма и внутреннее строение, а рассматривается только выполняемые ими функции, то такие элементы называются функциональными. Для механической системы элементами могут быть: деталь, звено, группа, узел, простой или типовой механизм.
en.coolreferat.com